高精度捷联式惯性导航系统算法研究
捷联惯性导航系统的解算方法
捷联惯性导航系统的解算方法捷联惯性导航系统(Inertial Navigation System,简称INS)是一种利用陀螺仪和加速度计等惯性测量单元测量物体的加速度和角速度,然后通过对这些测量值的积分计算出物体的速度和位置的导航系统。
INS广泛应用于航空航天、无人驾驶车辆和船舶等领域,具有高精度和自主性等特点。
INS的解算方法一般分为初始对准、运动状态估计和航位推算三个主要过程。
初始对准是指在启动导航系统时,通过利用外部辅助传感器(如GPS)或静态校准等方法将惯性传感器的输出与真实姿态和位置进行初次校准。
在初始对准过程中,需要获取传感器的初始偏差和初始姿态,一般采用标定或矩阵运算等方法进行。
运动状态估计是指根据惯性传感器的测量值,使用滤波算法对物体的加速度和角速度进行实时估计。
常用的滤波算法包括卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。
其中,卡尔曼滤波是一种最优估计算法,通过对观测值和状态进行线性组合,得到对真实状态的最佳估计。
扩展卡尔曼滤波则是基于卡尔曼滤波的非线性扩展,可以应用于非线性INS系统。
粒子滤波是一种利用蒙特卡洛采样技术进行状态估计的方法,适用于非高斯分布的状态估计问题。
航位推算是指根据运动状态估计的结果,对物体的速度和位置进行推算。
INS最基本的航位推算方法是利用加速度值对速度进行积分,然后再对速度进行积分得到位置。
但是,在实际应用中,由于传感器本身存在噪声和漂移等误差,导致航位推算过程会出现积分漂移现象。
为了解决这个问题,通常采用辅助传感器(如GPS)和地图等数据对INS的输出进行校正和修正。
当前,还有一些先进的INS解算方法被提出,如基于深度学习的INS 解算方法。
这些方法利用神经网络等深度学习模型,结合原始传感器数据进行端到端的学习和预测,以实现更高精度的位置和姿态估计。
综上所述,捷联惯性导航系统的解算方法主要包括初始对准、运动状态估计和航位推算三个过程。
其中,运动状态估计过程利用滤波算法对传感器的测量值进行处理,得到物体的加速度和角速度的估计。
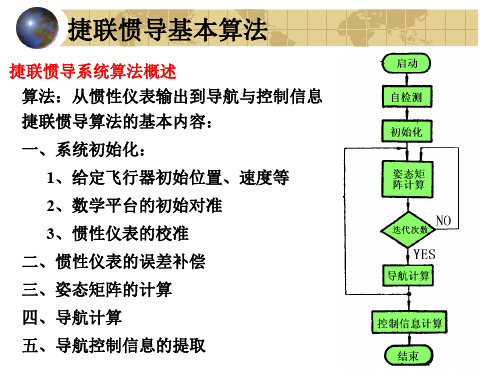
捷联惯导算法与组合导航原理讲义(20170220)

捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2016-9前言近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃发展,越来越多的高校学生、爱好者和工程技术人员加入到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法基本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后能够对捷联惯导算法有个系统而深入的理解,并能快速而有效地将基本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多宝贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技有限公司:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正。
作者2016年9月目录第1章概述 (6)1.1捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算基础 (10)2.1反对称阵及其矩阵指数函数 (10)2.1.1 反对称阵 (10)2.1.2 反对称阵的矩阵指数函数 (12)2.2方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2.2.2 等效旋转矢量 (14)2.3方向余弦阵微分方程及其求解 (17)2.3.1 方向余弦阵微分方程 (17)2.3.2 方向余弦阵微分方程的求解 (17)2.4姿态更新的四元数表示 (20)2.4.1 四元数的基本概念 (20)2.4.2 四元数微分方程 (23)2.4.3 四元数微分方程的求解 (25)2.5等效旋转矢量微分方程及其泰勒级数解 (26)2.5.1 等效旋转矢量微分方程 (26)2.5.2 等效旋转矢量微分方程的泰勒级数解 (29)2.6圆锥运动条件下的等效旋转矢量算法 (31)2.6.1 圆锥运动的描述 (31)2.6.2 圆锥误差补偿算法 (33)第3章地球形状与重力场基础 (40)3.1地球的形状描述 (40)3.2地球的正常重力场 (46)3.3地球重力场的球谐函数模型 (50)3.3.1 球谐函数的基本概念 (50)3.3.2 地球引力位函数 (58)3.3.3 重力位及重力计算 (63)第4章捷联惯导更新算法及误差分析 (69)4.1捷联惯导数值更新算法 (69)4.1.1 姿态更新算法 (69)4.1.2 速度更新算法 (70)4.1.3 位置更新算法 (76)4.2捷联惯导误差方程 (76)4.2.1惯性传感器测量误差 (76)4.2.2姿态误差方程 (78)4.2.3速度误差方程 (79)4.2.4位置误差方程 (79)4.2.5误差方程的整理 (80)4.3静基座误差特性分析 (82)4.3.1 静基座误差方程 (82)4.3.2 高度通道 (83)4.3.3 水平通道 (83)4.3.4 水平通道的简化 (88)4.3.5 水平通道误差方程的仿真 (90)第5章卡尔曼滤波基本理论 (92)5.1递推最小二乘法 (92)5.2 Kalman滤波方程的推导 (94)5.3连续时间随机系统的离散化与连续时间Kalman滤波 (101)5.4噪声相关条件下的Kalman滤波 (107)5.5序贯滤波 (111)5.6信息滤波与信息融合 (114)5.7平方根滤波 (116)5.8遗忘滤波 (124)5.9 Sage-Husa自适应滤波 (125)5.10最优平滑算法 (127)5.11非线性系统的EKF滤波、二阶滤波与迭代滤波 (130)5.12间接滤波与滤波校正 (136)5.13联邦滤波(待完善) (136)5.14滤波的稳定性与可观测度分析 (141)第6章初始对准及组合导航技术 (147)6.1捷联惯导粗对准 (147)6.1.1矢量定姿原理 (147)6.1.2解析粗对准方法 (149)6.1.3间接粗对准方法 (152)6.2捷联惯导精对准 (153)6.3惯性/卫星组合导航 (157)6.3.1空间杆臂误差 (157)6.3.2时间不同步误差 (158)6.3.3状态空间模型 (159)6.4车载惯性/里程仪组合导航 (159)6.4.1航位推算算法 (159)6.4.2航位推算误差分析 (161)6.4.3惯性/里程仪组合 (164)6.5低成本姿态航向参考系统(AHRS) (167)6.5.1简化的惯导算法及误差方程 (168)6.5.2地磁场测量及误差方程 (169)6.5.3低成本组合导航系统模型 (170)6.5.4低成本惯导的姿态初始化 (171)6.5.5捷联式地平仪的工作原理 (173)第7章捷联惯导与组合导航仿真 (176)7.1飞行轨迹和惯性器件信息仿真 (176)7.1.1飞行轨迹设计 (176)7.1.2 捷联惯导反演算法 (177)7.1.3 仿真 (178)7.2捷联惯导仿真 (180)7.2.1 Matlab子函数 (180)7.2.2捷联惯导仿真主程序 (185)7.3惯导/卫星组合导航仿真 (186)7.3.1Matlab子函数 (186)7.3.2组合导航仿真主程序 (187)附录 (190)A一些重要的三维矢量运算关系 (190)B 运载体姿态的欧拉角描述 (192)C 姿态更新的毕卡算法、龙格—库塔算法及精确数值解法 (199)D 从非直角坐标系到直角坐标系的矩阵变换 (207)E 线性系统基本理论 (211)F 加权最小二乘估计 (216)G 矩阵求逆引理 (217)H 几种矩阵分解方法(QR、Cholesky与UD) (219)I 二阶滤波中的引理证明 (223)J 方差阵上界的证明 (225)K 三阶非奇异方阵的奇异值分解 (226)L Matlab仿真程序 (231)M 练习题 (237)参考文献 (241)第1章概述第1章概述 (6)1.1捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)1.1捷联惯导算法简介在捷联惯导系统(SINS)中惯性测量器件(陀螺和加速度计)直接与运载体固联,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。
捷联惯导系统算法.ppt
cos
b Ebz
注意事项:当 θ= 90 度时,方程出现奇点
姿态计算 矩阵方程精确解1
二、方向余弦矩阵微分方程及其解 C C
其中
C bE
CbE
b Eb
0
b Eb
z
z
0
y
x
y x
0
由于陀螺仪直接测得的是载体 相对惯性空间的角速度,所以:
CbE
b ib
E iE
C
E b
或四元数微分方程:
q(t)
(
b ib
b iE
)q(t)
注意事项: 1、上述两个方程中的角速度表达式不一样 2、方程第二项较小,计算时速度可以低一些
增量算法 矩阵方程精确解
一、角增量算法
角增量:陀螺仪数字脉冲输出,每个脉冲代表一个角增量
一个采样周期内,陀螺输出脉冲数对应的角增量为:
C
0
0
c os
0 0 0 sin
sin
sin
c os
cos cos
求解欧拉角速率得
1 0
0
cos
0 sin
惯性器件的误差补偿
姿态计算 欧拉角微分方程1
姿态矩阵的计算 假设数学坐标系模拟地理坐标系 飞行器姿态的描述:
航向角ψ、俯仰角θ、滚动角γ 一、欧拉微分方程
从地理坐标系到载体坐标系 的旋转顺序:
Ψ →θ →γ
捷联式惯性导航仿真研究
时, 对位移进行二 次求 导计算 加速 度时计 算量 大 ; 采用种 自主导航系统 , 具 有工作 时不 向外接 收
F o r t e s t i n g t h i s p r o g r a m,t h e r e l a t r a j e c t o y r a n d m a t h e ma t i c a l e x p l a n a t i o n m e t h o d w e r e c o m b i n e d t o d e s i g n c a r r i e s r
( S c h o o l o f Me c h a n i c a l a n d E l e c t i r c l a E n g i n e e r i n g , C e n t r a l S o u t h U n i v e r s i t y ,C h a n g s h a Hu n a n 4 1 0 0 8 3 ,C h i n a )
ABS TRACT: S t r a p—d o wn i n e r t i a l n a v i g a t i o n b e c a u s e i t ' s i n d e p e n d e n t ,s t a b l e p e fo r r ma n c e ,s i mp l y e q u i p me n t ,a n d
中 图分 类 号 : T P 3 9 1 . 9 文献标识码 : B
S t r a p— — Do wn I n e r t i a l Na v i g a t i o n S i mu l a t i o n Re s e a r c h
XI E Mu—s h e n g, W ANG He n g—s h e n g, LUO Ta o
车载捷联惯导系统定位测姿算法研究
第15卷第l期2007年2月中国惯性技术学报JoumalofChineseInertialTcchnologyVbl.15No.1Feb.2007文章编号:1005-6734(2007)01一0024-04车载捷联惯导系统定位测姿算法研究陈允芳1,叶泽田2,钟若飞3(1.山东科技大学地球信息科学与工程学院,青岛266510;2.中国测绘科学研究院,北京100039;3.首都师范大学,北京100037)摘要:GPs/INs组合精确测定平台的位置和姿态是移动测图系统中的重要模块。
对陀螺仪和加速度计所测角速度和比力进行两次积分得载体姿态、速度和位置即sINs力学机械编排。
目前该过程大多在地理坐标系进行。
这里详细推导了地球坐标系中完整的解算过程,以四元数姿态矩阵更新及重力计算为核心,由IMu原始观测值解算出了载体位置、速度和姿态等参数,可快速高效与GPs输出的位置速度信息进行组合滤波处理,可据此编程进行工程应用数据处理。
关键词:捷联惯导系统;姿态矩阵;坐标转换;力学编排;四元数中图分类号:u666.1文献标识码:APositioningandorientationcomputationonVehicle-borneSINSanddiscussofcalculationerrorcHENYun.‰91,YEze-tian2,zHONGRuo.fei3(1.Geo·info衄ationScience&EngineeringCollege,ShandongUniverSi哆ofScienceaIldTbchnology,Qingdao266510,China;2.SurveyingaTldMappingScienceResearchInStituteofChina,Beijing100039,China;3.C印italNomlalUniverSi劬Beijing100037,China)Abstract:GPSandINSintegratedtoaccuratelydeteminingpositionaIldattitudeofnatI‘oofisVitalmoduleinmobilemappingSystem.Specincforcc行omspeedometer蚰d舭glerate矗om留roareinte铲atedtwicerespectiVelytoachievean沁de,veloc时aIldpositionn锄elySINSmechaIlization.Currentlythistookplacedingeogr印hiccoordinate,whiIeheredemonstratedindetailmewholemechaJlizationineanll-centclrcdearth-fixedcoordinate,mostlyquatemiona钍itudematrixupdating锄dgravit)rcaIculation.Ultimatelyvehiclenavigationpar锄eterssuchaSattitude,veIocity锄dpositionwercgahed丘omIMUorigin“0bservations.Mathematicsplatfo眦isfomlcdinSrNStocarryoutsuⅣeyingaJldcalculatingpreciselythenavigationmoVementpar锄cterS.Theresultsarcpronetointe黟atewitllsimilarpammeters疔omGPStofilterprocessing.Pro可锄minghercbyc锄pmcessdatainengineeringapplicationKeywords:SINS;attitudematrix;coordinatetransfomation;mechanization;quatemion随着惯性技术与卫星导航定位技术的发展,由GPS/INs不同程度组合而成的定位定姿传感器已成为移动测图系统中确定载体轨迹和平台姿态的重要工具,其中GPs多用于定位而INS则用于测姿。
捷联惯导系统极区导航算法优化设计及误差特性分析
捷联惯导系统极区导航算法优化设计及误差特性分析张海峰;张礼伟;王兴岭;李琳;仲岩【摘要】采用格网坐标系下的力学编排方案能够有效解决常规惯导系统力学编排方案在极区航向误差急剧发散且无法实现定位定向的难题.格网坐标系力学编排方案可以直接获得格网航向,以及地心地固坐标系下的位置坐标,且输出航向精度及定位精度不随纬度的增高而变差.通过深入研究格网坐标系力学编排方案的误差传播规律,详细分析了高纬度下格网航向保持高精度输出的数学机理.针对格网坐标系力学编排方案在极点附近存在计算奇异值的问题,提出了一种通过格网坐标系和地球坐标系间的位置方向余弦矩阵更新解算替代由地心地固位置坐标求解经纬度三角函数值的优化算法,实现了真正意义上的格网坐标系力学编排方案在极区的“无死角”导航能力.仿真分析了载体沿经线穿越极点运动时的算法性能,并与固定指北力学编排方案进行了比较,结果表明,相比于传统导航方案,格网系下输出的航向误差不随纬度升高而发散,导航精度与低纬度区域导航能力相当.【期刊名称】《中国惯性技术学报》【年(卷),期】2015(023)006【总页数】6页(P701-706)【关键词】极区导航;格网坐标系;误差特性;算法优化【作者】张海峰;张礼伟;王兴岭;李琳;仲岩【作者单位】天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131【正文语种】中文【中图分类】U666.1随着航空、航海事业的蓬勃发展以及国际政治经济的不断变化,对海军作战舰艇的全球作战能力提出了更高的要求。
由于极区地理经线快速收敛,导致传统地理导航坐标系失效。
虽然自由和游移方位惯导可在极区完成姿态方向余弦矩阵和位置方向余弦矩阵的解算,但从矩阵中提取航向信息和经度信息时存在奇异值。
采用格网线取代传统的地理经纬线对地表重新划分是解决该问题的有效手段之一。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种利用惯性测量单元(IMU)来获取和解析导航信息的先进技术。
它以其高精度、高动态性以及全自主工作的特性,在航空、航天、航海、车辆导航等领域中发挥着重要的作用。
本文将深入探讨捷联惯性导航系统的关键技术研究,从系统组成、工作原理、技术难点到解决方案等方面进行详细阐述。
二、系统组成与工作原理捷联惯性导航系统主要由惯性测量单元(IMU)、导航计算机、算法处理软件等部分组成。
其中,IMU是系统的核心,它包括加速度计和陀螺仪,用于实时测量载体在三维空间中的运动状态。
导航计算机则负责采集IMU的数据,通过算法处理软件进行数据解析和处理,最终输出导航信息。
捷联惯性导航系统的工作原理主要依赖于牛顿第二定律和角动量守恒定律。
通过测量载体的加速度和角速度,系统可以推算出载体的运动轨迹和姿态信息,从而实现导航定位。
三、关键技术研究1. 高精度IMU技术研究IMU的精度直接影响到整个系统的导航精度,因此提高IMU 的精度是捷联惯性导航系统的关键技术之一。
当前,研究者们正在通过优化加速度计和陀螺仪的设计和制造工艺,提高其测量精度和稳定性。
此外,采用先进的滤波算法和校准技术,也可以有效提高IMU的精度。
2. 算法优化技术研究算法是捷联惯性导航系统的核心,其优化程度直接影响到系统的性能。
目前,研究者们正在致力于开发更加高效的算法,以实现更快的数据处理速度和更高的导航精度。
同时,针对不同应用场景,如高动态、强干扰等环境,研究者们也在进行相应的算法优化工作。
3. 系统误差校正技术研究由于惯性器件的误差积累和环境干扰等因素的影响,捷联惯性导航系统在长时间工作时会产生较大的误差。
因此,系统误差校正是捷联惯性导航系统的另一个关键技术。
研究者们正在通过建立更加精确的误差模型,采用先进的校正算法和技术手段,对系统误差进行实时校正,以保证系统的导航精度和稳定性。
四、结论捷联惯性导航系统是一种重要的导航技术,具有广泛的应用前景。
捷联惯导算法与组合导航原理讲义

捷联惯导算法与组合导航原理讲义严恭敏,翁浚编著西北工业大学2016-9前言近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机,都有惯性技术存在甚至大显身手的身影。
相应地,惯性技术的研究和开发也获得前所未有的蓬勃发展,越来越多的高校学生、爱好者和工程技术人员加入到惯性技术的研发队伍中来。
惯性技术涉及面广,涵盖元器件技术、测试设备和测试方法、系统集成技术和应用开发技术等方面,囿于篇幅和作者知识面限制,本书主要讨论捷联惯导系统算法方面的有关问题,包括姿态算法基本理论、捷联惯导更新算法与误差分析、组合导航卡尔曼滤波原理、捷联惯导系统的初始对准技术、组合导航系统建模以及算法仿真等内容。
希望读者参阅之后能够对捷联惯导算法有个系统而深入的理解,并能快速而有效地将基本算法应用于解决实际问题。
本书在编写和定稿过程中得到以下同行的热心支持,指出了不少错误之处或提出了许多宝贵的修改建议,深表谢意:西北工业大学自动化学院:梅春波、赵彦明、刘洋、沈彦超、肖迅、牟夏、郑江涛、刘士明、金竹、冯理成、赵雪华;航天科工第九总体设计部:王亚军;辽宁工程技术大学:丁伟;北京腾盛科技有限公司:刘兴华;东南大学:童金武;中国农业大学:包建华;南京航空航天大学:赵宣懿;武汉大学:董翠军;网友:Zoro;山东科技大学:王云鹏。
书中缺点和错误在所难免,望读者不吝批评指正.作者2016年9月目录第1章概述 (6)1.1捷联惯导算法简介 (6)1.2 Kalman滤波与组合导航原理简介 (7)第2章捷联惯导姿态解算基础 (10)2。
1反对称阵及其矩阵指数函数 (10)2。
1。
1 反对称阵 (10)2。
1.2 反对称阵的矩阵指数函数 (12)2。
2方向余弦阵与等效旋转矢量 (13)2.2.1 方向余弦阵 (13)2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
针对捷联惯导系统中的圆锥运动及其三子样等效旋转矢量补偿算法进行了详细分析.并在超音速条件下,对三子样优化算法和分别利用前一补偿周期角增量及前两个补偿周期角增量的三子样等效旋转矢量修正算法对圆锥误差的补偿进行了仿真分析.仿真结果显示,利用前两个补偿周期角增量的三子样等效旋转矢量补偿修正算法精度最高,三子样优化算法精度最低.因此,在受器件限制,不能提高采样频率的情况下,通过利用前两个补偿周期角增量的历史信息可显著减小误差,而在导航程序的编写上只是增加了几个乘法和循环运算,工程上较易实现.
41.张亚崇一种四元数更新算法的推导及仿真研究 2002
42.John E Bortz A New Mathematical Formulation for Strapdown inertial Navigation 1997(01)
43.Jodorn J W An Accurate Strapdown Direction Cosine Algorithms 1969
7.张家海.谢荣生.郝燕玲船用捷联惯导系统姿态解算的研究[期刊论文]-电机与控制学报 2000(2)
8.薛祖瑞关于捷联惯导系统圆锥误差的诠释[期刊论文]-中国惯性技术学报 2000(4)
9.杨亚非惯导系统初始对准技术综述 2002
10.耿延睿.朱更明基于面向对象的捷联惯导系统中四元数计算方法[期刊论文]-湘潭矿业学院学报 1999(2)
17.吴云洁捷联计算机设计 1997
18.吴奋捷联惯导可靠性的奇偶向量方法 1991
19.吴俊伟捷联惯性系统的捷联算法误差补偿 2001
20.程向红捷联惯性导航系统动基座初始对准研究[学位论文]博士 1997
21.张京妹捷联惯导系统的真锥误差分析 2000
22.张士邈捷联惯导系统姿态算法研究 2001
作者:张春慧
学位授予单位:哈尔滨工程大学
1.崔中兴惯性导航系统 1982
2.陈哲捷联惯性系统原理 1986
3.张树侠捷联式惯性导航系统原理 1992
4.捷联式惯性导航技术 2001
5.谢荣生.孙枫船用捷联惯导系统比力转换方法研究[期刊论文]-中国惯性技术学报 2000(3)
6.程向红.万德钧船用捷联惯导系统在系泊状态下的快速初始对准方法[期刊论文]-船舶工程 1997(6)
5.期刊论文李辉.孟秀云.刘藻珍.LI Hui.MENG Xiu-yun.LIU Zao-zhen角速率输入下的捷联惯导系统改进航姿算
法-弹道学报2006,18(2)
针对角速率输入下仅利用角增量信息的等效旋转矢量算法精度降低的问题,结合当前角速率、角增量并引入前次角增量信息,提出了一种捷联惯导系统的改进等效旋转矢量航姿算法.在角速率输入条件下,获得了理论上的圆锥误差补偿效果,纯圆锥运动的仿真结果表明捷联系统的姿态精度得到了改善.
46.YEON FUH JIANG.YU PING LIN Improved Strapdown Coning Alignrithms 1992(02)
47.Valery Z Gusinsky.Vladimir M Lesyuchevsky.Yury A Litmanovicn.Howard Musoff, George T. Schmidt A New Procedure for Strapdown Attitude Algorithms Optimization as Applied to Stochastic Motion Input 1997(04)
5、对姿态算法在不同的环境下进行仿真,通过对算法产生的姿态误差的比较,评价了新算法的性能;仿真结果表明本文中给出的新算法在不增加很多计算量的基础上可以提高算法精度,是一种实用的高精度算法。
3.期刊论文王杰.谷宏强.WANG Jie.GU Hong-qiang速率捷联惯导系统多子样旋转矢量算法研究-科学技术与工程
44.Robin B Miller A New Strapdown Attitude Algotithms 1983(04)
45.Jang G Lee.Yong J Yoon.John G Mark.Daniel A. Tazartes Extension of Strapdown Attitude Algorithm for Hign-Frequency Base Motion 1990(04)
8.学位论文叶先友鱼雷捷联惯导系统算法和误差研究与仿真1999
该文结合国内外鱼雷控制的发展动向和捷联惯导技术的发展的实际状况,详细研究了以下内容:(1)鱼雷捷联式惯导系统基本算法及其仿真.详细研究了鱼雷捷联系统的基本工 作原理、基本算法的数学模型和程序编排,并编制仿真程序对算法进行了数学仿真,为以后惯导控制一体化研究和组成鱼雷制导一体化仿真环境打下了基础;(2)定义了捷联惯导积分 函数的总体设计要求,研究了开发基于双速方法的姿态积分算法的总的设计过程等.以连续微分方程的形式给出了典型捷联惯导姿态、速度和位置的方程,这作为等价的算法设计过程的框架.对高速部分以一般的形式给出了双速姿态积分算法(包括导航坐标系的旋转效应),并提出了一种描述典型高速二阶旋转运动计算方法设计的特定形式.给出了针对特定应用事例和建立相应运行速率所选择算法的一般性方程;(3)建立了鱼雷捷联惯导系统的误差数学 模型,针对误差数学模型,编写了仿真程序,结合仿真曲线进一步对捷联惯导系统误差传播特性进行研究
7.期刊论文万振刚.周百令.吴镇扬.WAN Zhen-gang.ZHOU Bai-ling.WU Zhen-yang一种改进的扩展旋转矢量姿态
算法-火力与指挥控制2009,34(2)
在分析扩展旋转矢量姿态算法的基础上,基于典型圆锥运动理论以及迭代算法的思想推导了一种面向四子样的改进扩展旋转矢量优化算法.给出了较为详细的算法推导过程和具体公式.为检验改进算法的有效性,先后采用传统的四元数法、扩展旋转矢量法以及改进算法,对载体的典型圆锥运动进行了计算机仿真研究.结果表明,该优化算法不仅改变了捷联惯性导航系统中陀螺子样的利用方式,而且提高了系统旋转矢量的计算精度以及姿态算法的实时性.
23.郁光辉.刘晓光.戴亚平.陈家斌捷联惯导系统非线性误差补偿的随机采样法[期刊论文]-北京理工大学学报2002(6)
24.耿延睿捷联惯导系统划船效应补偿算法研究 2001
25.柴卫华捷联惯导系统可观测性的研究 2000
26.赵勇捷联惯导系统的软件开发 1993
27.雷鸣捷联惯Βιβλιοθήκη 系统算法比较研究 200234.王养柱捷联式惯性导航系统算法研究 2000
35.徐丽娜捷联系统航姿算法研究 2000
36.程加斌捷联系统三阶姿态算法的改进研究 1998
37.程加斌捷联系统姿态算法的优化 1998
38.吴俊伟捷联姿态算法非互易误差的分析与修正 2001
39.黄昊旋转矢量法系数优化与仿真 2001
40.黄昊旋转矢量航姿算法的一种新的表达式 2001
50.Valery Z Gusinsky.Vladimir M Lesyuchevsky.Yury A Limanovicn.Howard Musoff, George T. Schmidt A Optimization of Strapdown Attitude Algorithms for Stochastic Motion 1997(02)
48.M B Igngni Optimal Strapdown Attitude Integration Algorrithms 1990(02)
49.Howard Musoff.James H Muphy Study of Strapdown Navigation Attitude Algorithms 1995(02)
11.谢荣生基于小波分析的船用捷联陀螺信号滤波方法 2001
12.郭圣权捷联惯性导航中一种算法的推证 2002
13.陈小刚基于FOG捷联航姿基准系统的研究与设计[学位论文]硕士 2002
14.卢军政捷联惯导积分算法设计 2001(03)
15.杨艳娟捷联惯性导航系统关键技术研究 2001
16.张士邈适合高动态环境的捷联惯导系统高精度算法研究[学位论文]硕士 2002
2008,8(14)
针对多子样旋转矢量算法,通过Matlab编程实验,详细分析给定条件下各子样算法的精度等级,对整个惯导系统误差补偿方案的设计及算法的选取,有一定的参考价值.
4.学位论文张士邈适合高动态环境的捷联惯导系统高精度算法研究2002
该文首先系统介绍了捷联惯导系统的基本理论,包括捷联惯导系统的工作原理、捷联惯导系统的姿态更新和导航计算,其中重点介绍了姿态矩阵的求解算法.该论文着重进行了以下几个问题的研究:1.高动态环境下捷联惯导系统的误差研究,分析了圆锥误差、划桨误差和涡卷误差的产生机理,并提出了误差的补偿方法;2.从旋转矢量的概念出发,推导了算法的精度准则,在典型的高动态环境——锥运动作为输入条件下,以使锥误差最小为原则,推导了旋转矢量各阶子样算法及其优化算法,并与传统的四元数算法进行了比较;3.对各算法的计算量问题进行了研究;4.在纯锥运动条件下进行了数字仿真,对各算法的精度进行了比较,仿真结果与理论结果一致.另外对如何选取旋转矢量几阶子样算法作为姿态更新算法,以及如何合理利用陀螺仪输出信息的问题进行了说明;5.最后,针对一种工程应用的实例——定向炸弹运动的实际情况,对其捷联系统采用不同算法的精度进行了仿真比较.
3、在多项式运动模型下,推导了双子样和三子样新算法表达式,得到了其中各个补偿项的系数:并针对三子样新算法形式烦琐的问题做了简化。
4、在圆锥运动模型下,推导了双子样和三子样新算法表达式,得到了另一组系数;针对系数中含有圆锥参数,使得算法应用受到限制的问题,推导了用已知量代替圆锥参数的表达式,算法应用得到推广。
28.王养柱捷联惯导系统圆锥补偿算法研究 2001
29.王养柱捷联惯导系统员追补偿研究算法优化设计 2000