捷联惯性导航原理
捷联式惯性导航系统培训讲学
1 绪论随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。
于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。
惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1]1.1 捷联惯导系统工作原理及特点惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。
惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。
§3.9捷联式惯导系统介绍
G G dωie G dr 对上式求导,假定地球旋转角速度是常矢量, = 0且 = ve ,可得 dt dt e G K dv e G G d 2r K K G = + ωie × ve + ωie × [ωie × r ] 2 dt i dt i
而
K G G d 2r = f +G dt 2 i
G G G G G dv e K K G = f − ωie × ve − ωie × [ωie × r ] + G dt i
b 标系 Oe X iYi Z i 的角速度 ωib ,上角标 b 表示该角速度在 b 坐标系上的投 b 进行姿态矩阵 Cbi 计算。由于姿态矩阵 Cbi 中的元素是 影。利用 ωib
OX bYb Z b 相对 OX iYi Z i 的航向角、横滚角、俯仰角的三角函数构成,
所以当求得了姿态矩阵 Cbi 的即时值,便可进行加速度计信息的坐标 变换和提取姿态角的大小。 这三项功能实际上就代替了平台式惯性导 航系统中的稳定平台的功能, 这样计算机中的这三项功能也就是所谓
哥氏校正
fb
比力测量值 的分解
fi
∑
∑
速度v e和 位置的估 计值
i
导航计算
Cbi
固连于载体 的陀螺
ω
b ib
速度和位置的初始估计值 姿态计算
姿态的初始估值
图 捷联式惯导系统——惯性坐标系机械编排
3、当地地理坐标系的机械编排
在这种机械编排中,地理坐标系表示的地速是 vet ,它相对于地理 坐标系的变化率可通过其在惯性坐标系下的变化率表示 G G dv e dv e G G G = − [ wie + wet ] × ve dt t dt i G G G G G G dv e dve 用 ,得 = f − ωie × ve + g1 替代 dt t dt i G G dv e G G G K = f − [2 wie + wet ] × ve + g1 dt t 表示在选定的导航坐标系(地理坐标系)中,有
捷联式惯性导航系统原理

1、方向余弦表cos cos sin sin sin sin cos cos sin sin cos sin sin cos cos cos sin cos sin sin sin cos sin sin cos sin cos cos cos C ψϕψθϕψϕψθϕθϕψθψθθψϕψθϕψϕψθϕθϕ-+-⎡⎤⎢⎥=-⎢⎥⎢⎥+-⎣⎦(1.0.1)X E Y C N Z ζ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(1.0.2) 在列写惯导方程需要采用方向余弦表,因为错误!未找到引用源。
α较小,经常采用两个假设,即:cos 1sin 1αα≈≈ (1.0.3)式中 α-两坐标系间每次相对转动的角度。
由于在工程实践中可以使其保持很小,所以进一步可以忽略如下形式二阶小量,即:sin sin 0αβ≈ (1.0.4)式中β-两坐标系间每次相对转动的角度。
可以将C 近似写为:111C ψϕψθϕθ-⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦(1.0.5) 2、用四元素表示坐标变换对于四元素123q p i p j p k λ=+++,可以表示为如下形式cossincos sincos sincos 2222q i j k θθθθαβγ=+++ (2.0.1)式(2.0.1)的四元数称为特殊四元数,它的范数1q =。
1'R q Rq -= (2.0.2)式中''''R xi yj zk R x i y j z k=++=++ (2.0.3)将q 和1q -的表达式及式(2.0.3)带入(2.0.2),然后用矩阵表示为:()()()()()()()()()22221231231322222123213231222213223131222''22'22p p p p p p p p p x x y p p pp p p p p p yz z p p p p p p p p p λλλλλλλλλ⎡⎤+--+-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+--+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥+-+--⎣⎦(2.0.4)由四元素到方向余弦表的建立123cos cos22sin cos22sin sin22cos sin22p p p θψϕλθψϕθψϕθψϕ-=-=-=+= (2.0.5) 将式(2.0.5)带入式(2.0.4),有cos cos sin cos sin cos sin sin cos cos sin sin sin cos cos cos sin sin sin cos cos cos cos sin sin sin sin cos cos C ϕψϕθψϕψϕθψϕθϕψϕθψϕψϕθψϕθθψθψθ-+⎡⎤⎢⎥=---+⎢⎥⎢⎥-⎣⎦(2.0.6)3、四元数转动公式的进一步说明采用方向余弦矩阵描述飞行器姿态运动时,需要积分姿态矩阵微分方程式,即C C =Ω (3.0.1)式中 C -动坐标系相对参考坐标系的方向余弦阵Ω-动坐标系相对参考坐标系角速度ω的反对称矩阵表达式 其中C 为公式(1.0.5)提供000z y zx y xωωωωωω⎡⎤-⎢⎥Ω=-⎢⎥⎢⎥-⎣⎦(3.0.2)采用(3.0.1)计算需要列写9个一阶微分方程式,计算量大。
捷联惯性导航系统的解算方法课件

02
CATALOGUE
捷联惯性导航系统组成及工作 原理
主要组成部分介绍
惯性测量单元
包括加速度计和陀螺仪,用于测量载体在三个正交轴上的加速度 和角速度。
导航计算机
用于处理惯性测量单元的测量数据,解算出载体的姿态、速度和 位置信息。
控制与显示单元
用于实现人机交互,包括设置导航参数、显示导航信息等。
工作原理简述
学生自我评价报告
知识掌握情况
学生对捷联惯性导航系统的基本原理、解算 方法和实现技术有了深入的理解和掌握。
实践能力提升
通过实验和仿真,学生的动手实践能力得到了提升 ,能够独立完成相关的实验和仿真验证。
团队协作能力
在课程项目中,学生之间的团队协作能力得 到了锻炼和提升,能够相互协作完成项目任 务。
对未来发展趋势的预测和建议
捷联惯性导航系统的解算 方法课件
CATALOGUE
目 录
• 捷联惯性导航系统概述 • 捷联惯性导航系统组成及工作原理 • 捷联惯性导航系统解算方法 • 误差分析及补偿策略 • 实验验证与结果展示 • 总结与展望
01
CATALOGUE
捷联惯性导航系统概述
定义与基本原理
定义
捷联惯性导航系统是一种基于惯性测量元件(加速度计和陀螺仪)来测量载体(如飞机、导弹等)的加速度和角 速度,并通过积分运算得到载体位置、速度和姿态信息的自主导航系统。
01
高精度、高可靠性
02
多传感器融合技术
随着科技的发展和应用需求的提高, 捷联惯性导航系统需要进一步提高精 度和可靠性,以满足更高层次的应用 需求。
为了克服单一传感器的局限性,可以 采用多传感器融合技术,将捷联惯性 导航系统与其他传感器进行融合,提 高导航系统的性能和鲁棒性。
§3.7捷联式惯导系统介绍4

而
Ctb = (Cbt ) −1 = Cbt
位置信息 重力计算
gt
固连于载体 坐标系的加 速度计
哥氏校正
fb
比力测量值 的分解
ft
∑
∑
速度ve 和 位置的估 计值
t
导航计算
Cbt
固连于载体 的陀螺
ω
速度和位置的初始估计值
b ib
姿态计算
t t ωie + ωet
姿态的初始估值
图 捷联式惯性导航系统——地理坐标系机械编排
重力加速度
r r v v r g = G − ωie × [ωie × r ]
于是
i &ei = f i − ωie v × vei + g i
加速度计提供的载体坐标系中比力的测量值,用向量 f b 表示。为 了建立导航方程,加速度计的输出必须分解到惯性系中,得到 f i
f i = Cbi f b
式中 Cbi 是一个 3 × 3 的矩阵,定义了载体坐标系相对于 i 系的姿态。利 用陀螺提供的角速度的测量值,可求解方向余弦矩阵 Cbi
b 标系 Oe X iYi Z i 的角速度 ωib ,上角标 b 表示该角速度在 b 坐标系上的投 b 进行姿态矩阵 Cbi 计算。由于姿态矩阵 Cbi 中的元素是 影。利用 ωib
OX bYb Z b 相对 OX iYi Z i 的航向角、横滚角、俯仰角的三角函数构成,
所以当求得了姿态矩阵 Cbi 的即时值,便可进行加速度计信息的坐标 变换和提取姿态角的大小。 这三项功能实际上就代替了平台式惯性导 航系统中的稳定平台的功能, 这样计算机中的这三项功能也就是所谓
第二,在平台式系统中,计算机只完成导航计算并对惯性元件的 误差进行简单补偿。而在捷联式系统中,计算机除完成导航计算外 捷联式系统对计算机的容量、 速度和精度要求要比平台式惯导系统高 得多。计算机问题是捷联式惯导系统发展的另一障碍。但是近年来, 由于计算技术的惊人发展,满足捷联式系统购要求已不成问题,它已 经成为促进捷联式导航系统发展的积极因素。 第三,捷联式系统比平台式系统可靠性高,这是它的一个突出优 点。 这首先是由于捷联式系统用数字电路代替了平台式系统的复杂的 框架。 提高机电系统的可靠性要比提高电子部件特别是数子电路的可 靠性困难得多。 另外, 如果平台发生故障, 必须用另一个备用平台(包 括三个陀螺、三个或两个加速度计)取而代之才能继续完成导航任务。 而在捷联式系统中,任何一个惯性元件发生故障,只要用一个备用惯 性元件取而代之就行了。美国有人对 100 套惯导系统作过统计,由液 浮陀螺组成的平台式系统平均每工作 100 万小时发生故障 1832 次, 而捷联式系统只有 744 次。 第四,捷联式系统另一个突出优点是成本比较低。这主要是因为 在平台式系统中框架及其有关的元部件占去成本的大部分。另外,捷 联式系统维护比较简单方便,又进—步降低了维护费用。—套平台式 惯导系统的成本约为 6 万美元, 而相应的捷联式系统成本只需 2 万美 元。 第五,捷联式系统由于取消了笨重的框架结构、力矩电机、角度
车载捷联惯导系统基本原理
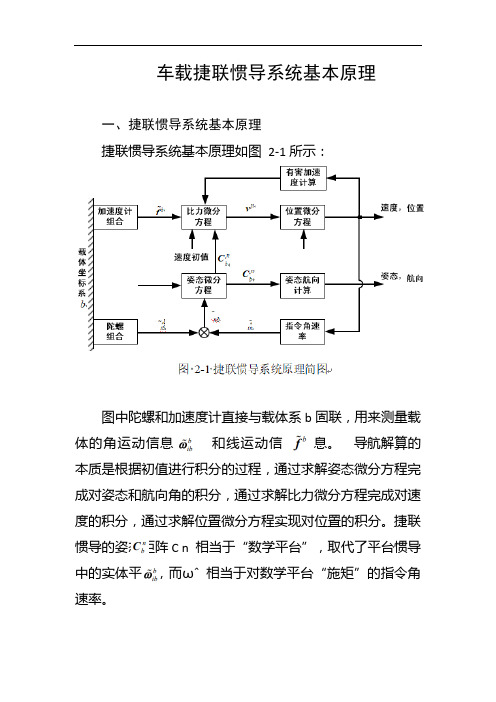
车载捷联惯导系统基本原理一、捷联惯导系统基本原理捷联惯导系统基本原理如图2-1所示:图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。
导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。
捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ωˆ相当于对数学平台“施矩”的指令角速率。
二、捷联惯导微分方程(一)姿态微分方程在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。
姿态矩阵微分方程的表达式为:在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90º时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。
(二)速度微分方程速度微分方程即比力方程,是惯性导航解算的基本关系式:三、捷联惯性导航算法捷联惯导解算的目的是根据惯性器件输出求解载体姿态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。
(一)姿态更新算法求解微分方程式(2.2-6)可得四元数姿态更新算法为:在车辆行驶过程中,一般不存在高频大机动环境,并且车载导航系统往往不工作在纯惯性导航方式,而是利用里程仪或零速条件进行组合导航,所以算法误差的影响有限,常用的5ms采样周期和二子样优化算法即可满足要求。
四、捷联惯导误差模型传感器误差、初值误差和算法误差是SINS的主要误差源,其中器件误差和初值误差又是影响导航结果的主要因素。
捷联式惯性导航系统

1 绪论随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。
于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。
惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1]1.1 捷联惯导系统工作原理及特点惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。
惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。
捷联惯性导航原理概要

捷联惯性导航原理概要捷联惯性导航(Inertial Navigation System,简称INS)是一种基于惯性力学原理运行的导航系统,用于测量和跟踪物体的位置、速度和加速度。
它通过内部的陀螺仪和加速度计来测量物体在空间中的运动状态,并根据质量、力和运动的基本原理来计算物体的位置和速度。
通过将陀螺仪和加速度计的输出信号转换为数字信号,并通过计算机处理,可以获得物体相对于初始参考点的位置和速度。
这些数据可以通过与地图或导航系统的集成来确定物体的位置和方向。
捷联惯性导航系统的原理是基于牛顿运动定律和旋转不变性原理。
根据牛顿第一定律,当物体处于惯性坐标系中且不受任何力的作用时,它将保持静止或匀速直线运动。
根据牛顿第二定律,当物体受到外力作用时,它将产生加速度。
根据旋转不变性原理,即物理量在不同坐标系下具有相同的数值,陀螺仪和加速度计可以测量物体的角速度和加速度,从而得到物体的位置和速度。
捷联惯性导航系统具有高精度和高稳定性的优势,尤其适用于无法使用其他导航系统(如GPS)或需要高精度导航的环境。
然而,它也存在一些局限性。
首先,由于陀螺仪和加速度计的测量误差和漂移,容易导致导航误差的累积。
其次,捷联惯性导航系统无法提供绝对位置信息,需要与其他导航系统集成才能获得绝对位置。
为了提高捷联惯性导航系统的性能,可以采用多传感器融合技术。
通过将多种导航系统(例如GPS、地图、惯性导航)的输出数据进行融合,可以提高导航的精度和可靠性,同时减少漂移和误差的影响。
总之,捷联惯性导航系统是一种基于惯性力学原理运行的导航系统,利用陀螺仪和加速度计测量物体的运动状态,并根据质量、力和运动的基本原理计算物体的位置和速度。
它具有高精度和高稳定性的优势,但也存在一些局限性,需要与其他导航系统集成才能获得绝对位置信息。
通过多传感器融合技术的应用,可以进一步提高捷联惯性导航系统的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.捷联惯导力学编排方程
姿态角定义: ψ航向角----载体纵轴在水平面的投影与地理子午线之间 的夹角,用ψ表示,规定以地理北向为起点,偏东方向 为正,定义域0~360°。 θ俯仰角----载体纵轴与纵向水平轴之间的夹角,用θ表 示,规定以纵向水轴为起点,向上为正,向下为负,定 义域-90 ° ~+90 ° 。 γ横滚角----载体纵向对称面与纵向铅垂面之间的夹角, 用γ表示,规定从铅垂面算起,右倾为正,左倾为负, 定义域-180 ° ~+180° 。(载体纵向对称面和 纵轴空 间 铅垂面)
捷联惯性导航原理
2010.11.30 北航通信导航与自动测试实验室
如果载体真实地理位置以纬度、经度、高度 表示,则与此对应的载体在地球坐标系中的 真实位置(x,y,z)可通过下式求得:
地球各点重力加速度近似计算公式: g=g0(1-0.00265cos&)/1+(2h/R) g0:地球标准重力加速度9.80665(m/平方秒) &:测量点的地球纬度 h:测量点的海拔高度 R: 地球的平均半径(R=6370km) s:时间 ????????????????????
f 为地球椭球模型的椭圆度,f= 1/298.257223563
R1 RN h R2 RM h
注意从瞬时速度过来那条线,用来计算w(enn)
3、捷联惯导系统的算法
3.1 姿态更新算法 四元数法:
Q(q0 , q1 , q2 , q3 ) q0 q1i q2 j q3k
1. 惯性导航中的常用坐标系
yt
yb
z e zi
北
xb
zb
zt
xt
O
东
Oe
xi
xe
ye
yi
地球坐标系到地理坐标系转换矩阵
Ce-g=
若为地理坐标系转为地球坐标系则为转置阵
2.捷联惯导力学编排方程
上图理解
上图理解:由陀螺仪的角速度(以及地球自转 等角速度 得到四元数微分方程,求解出 姿态 矩阵:一方面提取姿态角,一方面 把加速度计 比力转化为导航坐标系;再由比力方程得到 速 度,由速度得到位置。)
四元数的三角式为:
2 四元数与姿态矩阵之间的关系 :
q0 2 q12 q2 2 q32 Cbn 2(q1q2 q0 q3 ) 2(q1q3 q0 q2 )
Q cos
u sin
2
2(q2 q3 q0 q1 ) q0 2 q12 q2 2 q32 2(q1q3 q0 q2 )
1. 惯性导航中的常用坐标系
导航坐标系(下标为n)— Oxn yn zn 导航坐标系是在导航时根据导航系统工作的需要而选取 的作为导航基准的坐标系。 指北方位系统,游离方位系统;
载体坐标系(下标为b)— Oxb yb zb yb 轴沿载体纵轴指向前, xb 坐标原点位于载体的重心, 轴沿载体横轴指向右, zb 轴垂直于平面指向上。
n wie
航相对于地球,地球相对于惯性,相加=导航相对于惯性在n上 投影。再经姿态矩阵,得到相对于b上。(如后面一页中图所示)
0 n wie w cos L ie wie sin L
n wen
VN R h M VE R h N VE sin L R h cos L N
•ψ为航向角,θ为俯仰角,γ为横滚角 •程序中转换采用这一矩阵形式
导航坐标系绕三轴(zxy)依次旋转ψ 角θ角γ角,则得 到机体坐标系。由此,导航坐标系和机体坐标系之间的 转换矩阵为(和前面的不一样?)
0 0 cos 0 1 0 1 Cnb 0 cos sin 0 sin cos sin 0 cos cos sin cos sin sin cos sin cos cos sin sin
R1 RN h R2 RM h
2.捷联惯导力学编排方程
C11 C12 b Cn C C 21 22 C31 C32
C22
C13 C23 C33
90° -90°
C12
→0 →0 + + -
+ + +
主
+ + -
C33
主 主
主+180 主 -180
bz T 构 nb
2.捷联惯导力学编排方程
w w w w w C (w w )
b nb b ib b ie b en b ib b n n ie n en
也就是wnbb=wibb- winb式中: 为地球(坐标系相 对于惯性坐标系的)自转角速率在导航坐标系中的投 n 影;wen 为导航坐标系中相对地球坐标系的角速率 n 在导航坐标系上的投影。(由瞬时速度 Ven 求得) 导
k 4 1/ 2{[q(t ) k3 h] * (t h)}
1. 惯性导航中的常用坐标系
地球坐标系(下标为e)— Oe xe ye ze 地球坐标系的原点在地球中心 Oe , Oe ze 轴与 Oe zi 轴重合, ye 轴指向东经 xe 轴指向格林威治经线, Oe xe ye 在赤道平面内, 90°方向。又称为空间直角坐标系或地心地固坐标系。 (地球-x轴指向0子午线) 地理坐标系(东北天)(下标为t)— Oxt yt zt 原点选在载体重心处 , xt 指向东,yt 指向北, z t 沿垂线 方向指向天。 是在载体上用来表示载体所在位置的东向、北向和垂线 方向的坐标系。
2.捷联惯导力学编排方程
载体坐标系与地理坐标系之间的关系-----姿态矩阵 地理坐标系 Oxt yt zt 绕 zt 轴负向(拇指指z负旋转)转 角ψ得ox’y’z’ , ox’y’z’绕 x’轴转角θ得ox’’y’’’z’’, ox’’y’’’z’’再绕 y’’轴转角γ 则得到载体坐标 Oxb 。(地理到载体即是 yb zb 系 z负xy正正, ψ θ γ 形 式)
2(q1q2 q0 q3 ) q0 2 q12 q2 2 q32 2(q2 q3 q0 q1 )
3、捷联惯导系统的算法
3.1 姿态更新算法 四元数微分方程及计算 n 表征n系至b系的旋转四元数为 Q cos 2 u sin 2 通过求导变换可得四元数微分方程(姿态角速率在变 (更新),但是每一值都知道)
q(t h) q(t ) h / 6(k1 2k 2 2k3 k 4 )
k1 b k 2 1 / 2{[ q(t ) h] * tb (t h / 2)} k 2
2
k1 1/ 2[q(t ) * (t )]
b tb
k 3 1 / 2{[ q(t )
b (t ) 1 q q ( t )* nb (t ) 2
表示成矩阵形式,则有:
q0 0 b q 1 1 wnbx 2 wb nby q2 b wnbz q3
b wnbx 0 b wnbz b wnby
2.捷联惯导力学编排方程
姿态矩阵:从导航坐标系(n系)到载体坐标系(b系)的变 换矩阵;
sin sin sin cos cos b Cn sin cos cos sin sin sin cos cos sin sin sin cos cos cos sin sin cos sin cos cos sin sin cos cos
0
ve R1 cos L
R cos L
e 0 1 t 0
t
L L0
vn dt R2
vn L R2
h h0 vu dt
0
t
h vu
RM Re(1 2 f 3 f sin 2 L)
式中:
RM
RN
为载体所在的子午圈的曲率半径,
RN Re(1 f sin 2 L) 为载体所在的卯酉圈的曲率半径, Re 为地球椭球模型的半长轴, Re 6378137m
b wnby b wnbz 0 b wnbx
b q0 wnbz b q wnby 1 b q2 wnbx 0 q3
3、捷联惯导系统的算法
四元数微分方程 的解法---四阶龙格-库塔法—(适用于陀 螺输出为角速度)-----应将(h/6) (1/2)等括起来
+ -
主
主 -180 主+180
+
-
横滚角真值表
航向角真值表(多值问题)
2.捷联惯导力学编排方程
速度更新计算 比力方程:
n b n n n n V Cb f wen 2wie V g n
里面的值在前面都已列出
有害加速度(即上式中所提到的加速度) 哥氏加速度— 2wn V n ie n 向心加速度— wen V n 重力加速度— g 速度方程: f (2 sin L Ve tgL)V (2 cos L Ve )V V e e ie n ie u 比例方程展开 R1 R1
内容
1
惯性导航中的常用坐标系 捷联惯导力学编排方程
2
3
捷联惯导系统的算法
4
捷联惯导系统的误差分析
1. 惯性导航中的常用坐标系
地心惯性坐标系(下标为i) --- Oe xi yi zi 惯性坐标系是符合牛顿力学定律的坐标系,即是 绝对静止或只做匀速直线运动的坐标系。 以地心 Oe为原点作右手坐标系,Oe zi轴沿地轴指 Oe yi 轴在地球赤道平面内与 向地球的北极,Oe xi , 地轴垂直并不随地球自转,其中,Oe xi 轴指向春 分点。(惯性-不随地球自转,所以指向春分点) 春分点是天文测量中确定恒星时的起始点,因 此 Oe xi 、Oe yi 、 Oe zi 均指向惯性空间某一方向不变。