半挂汽车列车弯路运动轨迹计算机仿真
半挂汽车列车操纵稳定性的正交仿真分析

第31卷第1期 辽宁工业大学学报(自然科学版) V ol.31, No.12011年 2 月 Journal of Liaoning University of Technology(Natural Science Edition) Feb.2011收稿日期:2010-10-26作者简介:张立军(1963-),男,辽宁昌图人,教授,博士。
半挂汽车列车操纵稳定性的正交仿真分析张立军, 张晓维, 马 斌(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)摘 要:针对半挂汽车列车操纵稳定性影响因素复杂的特点,应用Arcsim 软件对半挂汽车列车进行建模仿真,用正交实验法分析了重要参数对有关性能的影响,并进行了优化。
结果表明该模型能够很好地模拟半挂汽车列车的运动状态,优化结果为牵引车-半挂车列车的性能研究和设计提供了参考。
关键词:半挂汽车列车;操纵稳定性;仿真;正交试验中图分类号:U469 文献标识码:B 文章编号:1674-3261(2011)01-0033-04Direct Intersection Simulation and Handling StabilityAnalysis of Semi-trailerZHANG LI-jun, ZHANG Xiao-wei, MA Bin(Automobile & Traffic Engineering College, Liaoning University of Technology, Jinzhou 121001, China )Key words: semi-trailer; handling-stability; simulation; direct intersection testAbstract: The Arcsim software was used for dynamic modeling and simulation analysis of semi-trailer against some main factors and complex characteristics on handling stability of semi-trailer. The direct intersection design method was applied to the analysis of the influence on corresponding semi-trailer construction parameters which were also optimized, The simulation results expatiate that the semi-trailer dynamic model simulates the semi-trailer response very well, and provides references for the research on semi-trailer stability design and performances study.随着公路运输业的快速发展,半挂汽车列车已成为公路运输的主力。
牵引车-半挂车列车转向性能仿真分析

南 京航 空航天 大学金 城学 院
江苏 南京
2 1 1 1 5 6
摘 要 :为 了分析 某半挂列车 的转向性能 ,运用A D A M S 软件 ,建立 了牵 引车一 转 向桥 半
挂 车 的 动 力 学 模 型 并 完 成 仿 真 分 析 ,仿 真 结 果 与 理 论 设 计 目标 存 在 一 定 误 差 。 故 同 时
常 重 要 的 地 位 ,但 由于 车 身较 长 日本还 研 制 出 用 电 子 控 制 器 实 时 控 制 转 向 的
挂 车 转 向 系 统 。 很 多学 者 对 此 进 行 过 深 入 研 究 , 迎献 [ 2 ] 哎
小 转 弯 直 径 较 大 ,影 响 原 地 掉 头 能 力 : 牵 引 车 和 半 挂 车 折 盛 的
对 无转向桥挂车进行 了仿真模拟 ,并与转 向桥挂车进行 了比较 。结果 显示 ,转 向桥挂
车 不仅 可 以 明显 减 小 整 车 的通 道 宽 度 ,有 利 于 提 高 整 车 的通 过 性 能 ,而 且 其 转 弯 直径
较大、离心力较小 ,轮胎 的侧偏角和横 向滑动较 小,对提 高车辆行驶稳 定性 和延长轮
A S i m ul a io t n A na l ys i s on St e e r i ng Pe r f o r ma nc e of Tr a c t or Se mi — t r a i l e r Co m bi na io t n
黄 继 刚 李 琳 顾 信 忠
临 界转 弯 直 径 较 大 ; 列 车 的 通 道 宽 度 较 大 , 影 响 车 辆 通 过 性
L世 纪 八 ‘ 年 代
就 育 相 关 专 利 : 国 内汉 阳特 种 汽 车 制 造 』 一 也 曾研 制 动 力 液 上 j 主 随 随 着 社 会 的 发 展 ,越 来越 多 的 大 型 货 物 及 设 备都 需 采 用 超 长半挂列车运输 , 此 超 长半 挂 车 在 军 用 和 民用 领 域 都 具 有 非
半挂车直线拐弯数学建模
半挂车直线拐弯数学建模近年来,随着我国道路运输市场的蓬勃发展,汽车制造业的迅猛增长。
其与交通运输相关的产品需求也在不断增加。
半挂车作为其中一种车型,已成为运输大批量货物、实现货运周转的重要手段。
由于半挂车具有载货能力大、行驶稳定、使用方便和经济等优点,所以挂车一直受到广大驾驶员的青睐。
然而,现在很多挂车司机对于它存在认识上的误区。
有些驾驶员在驾驶过程中经常会发生由于对某些操作不熟悉而造成挂车跑偏等问题情况。
其实,要想正确掌握半挂车的行驶路线是很简单的,主要就是要找出其直线行驶以及拐弯的规律。
在实际驾驶中,车辆在拐弯时也是会产生一些不规则变化,比如转向不一致、转向过度、转弯半径太小等都可能导致半挂车跑偏现象。
因此驾驶员应尽量找出其直线行驶以及拐弯过程中会出现哪些不规则变化这一问题进行有效规避和应对。
一、基本概念半挂车的拐弯是指将半挂车固定在道路上行驶,以使其在直线行驶中发生拐弯。
如图1所示。
而实际驾驶中,所处的路况不同时也会产生一定的变化。
当半挂车拐弯时,车辆与地面距离越大,它所产生的角度变化越大。
同时在拐弯时也会产生一些不规则的变化。
因此通过车辆行驶状态与特征参数的结合就可以对挂车进行分析以及定位工作。
因此我们在设计挂车时,要综合考虑以下几个因素来选择合适的方法。
(1)半挂车转向装置:这是影响半挂车跑偏最为重要的因素之一。
一般车辆均有一个转向器来对轮胎、转向轴、轮胎进行固定。
这三个部件在工作时其转速基本相同(即轮胎转速相同),所以说只要将三个车轮转动角度相一致便可保证挂车不会发生偏移。
但需要注意的是在这三个方向运动的车轮间相对旋转轴心转动。
当旋转轴心相对于轮毂轴线之间转动时,则可以认为其是正旋转,而不是旋转轴心则是反方向跳动。
在旋转过程中半挂车会发生横向移动,即转弯。
这是一种典型的惯性运动——轮胎转动惯性使轮胎产生转动。
所以一定不能在同一个方向上进行转动;也不能同时转动转向盘。
一般为了保证转弯半径比正常时半径小一倍以上;同时也不能小于转弯半径。
半挂汽车列车路径跟随模糊控制联合仿真
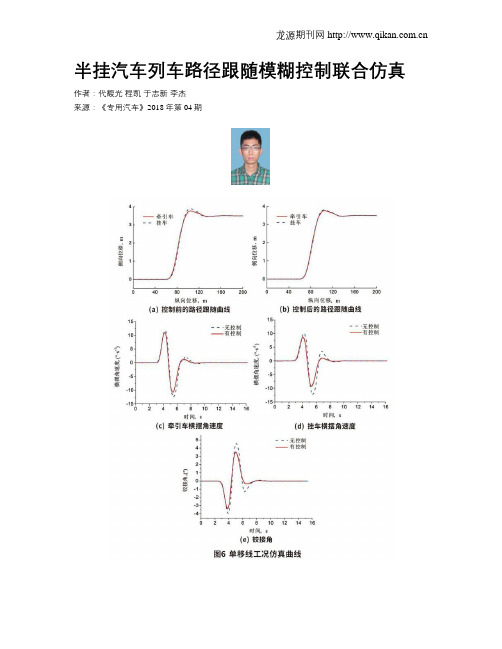
半挂汽车列车路径跟随模糊控制联合仿真作者:代馥光程凯于志新李杰来源:《专用汽车》2018年第04期摘要:应用TruckSim建立了半掛汽车列车非线性整车模型,并建立了简化的四自由度线性参考模型,以牵引车和半挂车的路径偏差和偏差变化率为控制变量设计了模糊控制器,并设计了差动制动控制器对车轮施加制动力矩,然后利用MATLAB/Simulink和TruckSim软件进行了联合仿真。
结果表明,所提出的方法提高了半挂车对牵引车的跟随能力,可以有效地避免甩尾、折叠等危险事故的发生。
关键词:半挂汽车列车模糊控制差动制动 TruckSim中图分类号:U469.53 文献标识码:A 文章编号:1004-0226(2018)04-0087-041 前言当前半挂汽车列车占据公路货运的主导地位,但因其质心高,尺寸大以及轮距比过大等特点,导致半挂车在转弯、超车等情况下难以跟随牵引车路径,极易引发折叠、摆振、甩尾等危险事故[1-2]。
因此,提高半挂汽车列车的路径跟随性对改善半挂汽车列车的通过性、机动性以及道路安全性至关重要。
为改善半挂汽车列车的路径跟随性,众多学者已在改善机械结构、应用后轴转向等方面进行了探索,但多集中于动力学建模与仿真、横摆和侧倾机理分析相关研究,而没有针对路径跟随问题进行专门研究[3-5]。
针对以上问题,可以利用改善半挂汽车列车路径跟随性来提升车辆横摆稳定性,以避免出现折叠、摆振、甩尾等危险工况。
横摆角速度是反映车辆横摆稳定性的重要参数,抑制横摆角速度可以提升车辆横摆稳定性,避免摆振和甩尾等危险工况。
而折叠是由于铰接角过大而引起的,通过抑制铰接角可以有效避免车辆发生折叠现象。
本文以路径偏差及其变化率为控制变量设计了模糊控制器,并通过差动制动对车辆施加附加横摆力矩,然后基于MATLAB/Simulink 与TruckSim软件进行了联合仿真,输出车辆路径曲线,观测控制后挂车对牵引车的跟踪情况;输出横摆角速度以验证提出的控制方案对摆振、甩尾等车辆横摆稳定性问题的控制效果;输出铰接角以验证该控制方案的防折叠能力。
半挂汽车列车路径跟随模糊控制联合仿真

半挂汽车列车路径跟随模糊控制联合仿真
代馥光;程凯;于志新;李杰
【期刊名称】《专用汽车》
【年(卷),期】2018(000)004
【摘要】应用TruckSim建立了半挂汽车列车非线性整车模型,并建立了简化的四自由度线性参考模型,以牵引车和半挂车的路径偏差和偏差变化率为控制变量设计了模糊控制器,并设计了差动制动控制器对车轮施加制动力矩,然后利用MATLAB/Simulink和TruckSim软件进行了联合仿真.结果表明,所提出的方法提高了半挂车对牵引车的跟随能力,可以有效地避免甩尾、折叠等危险事故的发生.【总页数】4页(P87-90)
【作者】代馥光;程凯;于志新;李杰
【作者单位】长春工业大学机电工程学院吉林长春130012;长春工业大学机电工程学院吉林长春130012;长春工业大学机电工程学院吉林长春130012;长春工业大学机电工程学院吉林长春130012
【正文语种】中文
【中图分类】U469.53
【相关文献】
1.半挂汽车列车联合制动系统性能仿真分析 [J], 何仁;申小敏
2.油压跟随性模糊控制的仿真研究 [J], 黄强;宋士华;李滟泽
3.基于TruckSim与Simulink联合仿真的半挂汽车列车横向稳定性控制 [J], 杨炜;
马浩越;郭祥靖
4.基于TruckSim与Simulink联合仿真的半挂汽车列车横向稳定性控制 [J], 杨炜;马浩越;郭祥靖;;;
5.基于模糊控制的汽车自适应巡航系统跟随工况的仿真 [J], 卢中德
因版权原因,仅展示原文概要,查看原文内容请购买。
半挂汽车列车路径跟随模糊控制联合仿真

3控制策略
在Matlab/Simulink软件中搭建了控制系统,包含模糊控制 器和差动制动控制器。模糊控制器以前文在TruckSim中搭建 的半挂汽⻋列⻋整⻋非线性模型输出的牵引⻋与半挂⻋的路
径yo、yo_2的偏差E及其变化率EC为输入,经过模糊计算,输出
附加横摆力矩ΔM。差动制动控制器根据TruckSim输出的实际
的
横
摆
响
应Ψ
1、Ψ
与
2
参
考
模
型
输
出
的
参
考
横
摆
响
应
· Ψ
1、Ψ·
2的
对比决策出 目标制动⻋轮,将制动力矩优化分配给各⻋轮以
实现模糊控制器输出的附加横摆力矩。控制系统结构如图2所 示。
6 6
. All Rights Reserved.
图1平面模型结构简化示意图
其
中,a
1,b
为
1
牵
引
⻋
质
. diAfflerlentiaRlibrgakhintgsconRtreolsleer wravs ededsi.gned to apply braking torque to the wheel. Next, the co-simulation study was proceed by using MATLAB/Simulink and TruckSim. The results show that the control method can improve the ability of the semitrailer following the tractor, moreover effectively avoid occurrence of dangerous accident such as shimmy, rollover and fold, etc. Key words tractor semitrailer; fuzzy control; differential braking; TruckSim 中图分类号:U469.53 文献标识码:A 文章编号:1004-0226(2018)04-0087-04
半挂汽车列车弯道行驶工况下轴偏角对行驶稳定性影响的仿真分析

(.inU iesy 2 Qnd oT cnlg a U iesy 3 Xa nKn ogU i dA tm t eIds yC .Ld 1 Ji nvrt; . i a eh o i l nvrt; . i l i g oc i me igL n nt uo oi ut o t) e v n r , 【 s a tT d rs tepo t it w e esmit i rri n uv, e it i rri oe w s Abt c]oa des h or a ly hnt e —r l anr si acre a sm —r l anm dl a r s bi h ae t u n ae t
主题 词 : 半挂汽 车 列车
弯道 行驶
Hale Waihona Puke 轴 偏 角 稳定 性 中 图分 类 号 : 4954 文献标 识码 : 文章 编 号 :0 0 30 (00 0 —0 3 0 U 6 .+ A 10— 7 32 1 )2 0 3— 4 Ana y i n t n ue e o i lDe i ton Ang e o ii a l y l sso heI f nc fAx a v a i l l n Drv ng St bii t W h n Se i r i r Tr i u e m -t al a n R nni g i e n n a Cur e v
e t b i e t i l t n a a y i ot r sa l h d wi smu a i n l sss f s h o wa e ADAMS y c mp rn e smu a in r s l r m ta y sae se r g t s .B o a g t i lt e u t fo se d — tt te n e t i h o s i s a d b a i g ef in y t ss w t h e lv h ce tss h o sse c ft e smu ai n mo e n h e lv h ce w s n r k n f c e c e t i t e r a e i l e t,t e c n i n y o h i l t d la d t e r a e il a i h t o v r e .An h n u n e o xa e it n a ge o od n n l n t e n h r c e si h n t e ta tr s mi ei d i f d t e if e c f a il d v ai n l n f l i g a g e a d se r g c a a t r t w e h r co — e l o i i c t i rr n n a c r e w s a ay e .T e r s l h w t a e h xa e it n a ge i c n it n t h t e n r l u s i u v a n lz d h e u t s o h twh n t e a i d va i n l s o ss twi t e se r g ae s l o e h i d r ci n o e - r i r tan h e — r i r t i o d n n l n r a e ,w ih i h 1 f lt h r i g sa i t f i t fs mi tal r i ,t e s mi t l r n fl i g a ge i c e s s h c s eF u o t e d v n tb l y o e o e ae a I i i
四轮转向半挂汽车列车行驶稳定性仿真研究

四轮转向半挂汽车列车行驶稳定性仿真研究
常胜;许洪国;刘宏飞
【期刊名称】《计算机仿真》
【年(卷),期】2009(026)012
【摘要】通过分析四轮转向(4WS)半挂汽车列车行驶性能,为在牵引车上采用4WS 技术能提高整个汽车列车行驶稳定性提供依据.建立4WS半挂汽车列车简化三自由度单轨动力学模型,在小角度转向和直线行驶两种行驶工况下对操纵稳定性能进行时域仿真研究.理论分析和基于MATLAB的仿真研究表明,4WS技术能使车辆的横摆角速度等状态量保持较小数值.稳定性好.最后,与只有前轮转向(FWS)牵引车列车的稳定性能作对比分析,验证出4WS对列车的高速稳定性和低速机动性有明显的好处.
【总页数】5页(P235-238,302)
【作者】常胜;许洪国;刘宏飞
【作者单位】吉林大学交通学院,吉林,长春,130022;佳木斯大学,黑龙江,佳木
斯,154007;吉林大学交通学院,吉林,长春,130022;吉林大学交通学院,吉林,长
春,130022
【正文语种】中文
【中图分类】U469.5
【相关文献】
1.基于滑模变结构控制法的半挂汽车列车高速行驶稳定性研究 [J], 龙佳庆;韦超毅;
2.侧风干扰下半挂汽车列车行驶稳定性仿真 [J], 张翼鹏;丁能根
3.半挂汽车列车弯道行驶工况下轴偏角对行驶稳定性影响的仿真分析 [J], 宋年秀;苏建;苏丽俐;李钱;刘宏飞;梁成江
4.基于滑模变结构控制法的半挂汽车列车高速行驶稳定性研究 [J], 龙佳庆;韦超毅
5.考虑行驶稳定性的四轮转向车辆路径跟踪控制研究 [J], 石沛林;蒋军锡;侯建伟;梁明磊;郑辽东;赵玉帅
因版权原因,仅展示原文概要,查看原文内容请购买。