半挂汽车列车
A2车型主要技术参数
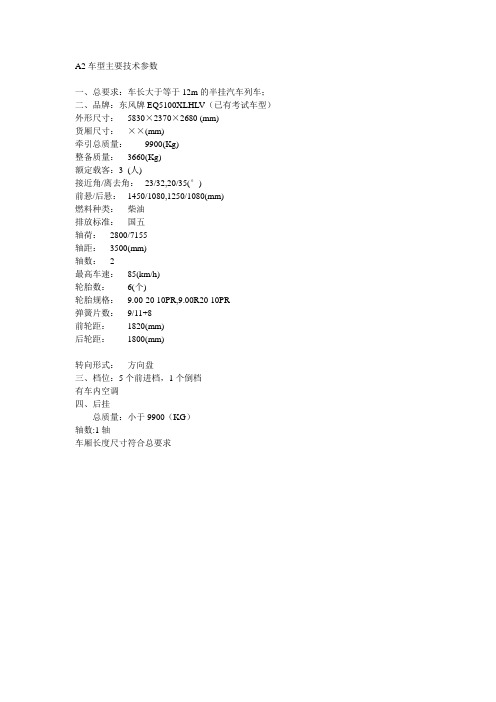
一、总要求:车长大于等于12m的半挂汽车列车;二、品牌:东风牌EQ5100XLHLV(已有考试车型)外形尺寸:5830×2370×2680 (mm)货厢尺寸:××(mm)牵引总质量:9900(Kg)整备质量:3660(Kg)额定载客:3 (人)接近角/离去角:23/32,20/35(°)前悬/后悬:1450/1080,1250/1080(mm)燃料种类:柴油排放标准:国五轴荷:2800/7155轴距:3500(mm)轴数: 2最高车速:85(km/h)轮胎数:6(个)轮胎规格:9.00-20 10PR,9.00R20 10PR弹簧片数:9/11+8前轮距:1820(mm)后轮距:1800(mm)转向形式:方向盘三、档位:5个前进档,1个倒档有车内空调四、后挂总质量:小于9900(KG)轴数:1轴车厢长度尺寸符合总要求一、总要求:车长大于等于9m,轴距大于等于5m的重型载货汽车;二、品牌:东风牌EQ5122XLHL2(已有考试车型)外形尺寸:9000×2480×2740(mm)货厢尺寸:6500×2300×550,600(mm)总质量:12015(Kg)整备质量:4380(Kg)额定载客:3(人)接近角/离去角:30/13,27/11(°)前悬/后悬:1250/2750,1250/2550,1450/2550,1450/2350(mm)燃料种类:柴油排放标准:国五轴荷:4050/7965轴距:5000,5200,5300(mm)轴数: 2最高车速:90(km/h)轮胎数:6(个)轮胎规格:9.00R20 12PR,9.00-20 12PR油耗:24.2(L/100Km)弹簧片数:9/12+9前轮距:1810(mm)后轮距:1800(mm)转向形式:方向盘三、档位:5个前进档,1个倒档有车内空调。
汽车列车

汽车列车是指一辆汽车(货车或牵引车) 汽车列车是指一辆汽车(货车或牵引车)与一辆或 一辆以上挂车的组合。 载货汽车和牵引汽车为汽车列车的驱动车节,简 称主车 被主车牵引的从动车节称为挂车 被主车牵引的从动车节称为挂车。 挂车。
一、 汽车列车的分类
汽车列车按其结构不同分为 全挂汽车列车 半挂汽车列车 双挂汽车列车 特种汽车列车等。 特种汽车列车等。
a.图解法
车辆在最大转向时,前外轮、前内轮各转至最大 角度amax和 max,轮迹垂直延长线交后轴延长线 角度amax和βmax,轮迹垂直延长线交后轴延长线 于O点。以O点为圆心,以O点至前外轮中心平面 点。以O点为圆心,以O 的距离为半径画圆,即可求得车辆的最小转弯直 径Dtmin。 Dtmin。 连接OO1 连接OO1(O1为半挂牵引车连接中心),以OO1 为半挂牵引车连接中心),以OO1 为直径作半圆, 再以O1为圆心,挂车轴距La为半 再以O 为圆心,挂车轴距La为半 径画弧,交半圆弧于O 点,OO2 径画弧,交半圆弧于O2点,OO2连线就是挂车后 轴轴线,O 轴轴线,O1O2连线为挂车纵向中心线,绘出轮距 及车辆总宽,再以O 及车辆总宽,再以O为圆心,以汽车列车最外侧 点及最内侧点的距离为半径画弧,可求得车辆的 最大通道宽度Amax。 最大通道宽度Amax。
(1)动力性能 (1)动力性能
(2)燃油经济性 (2)燃油经济性
经济性是推动半挂汽车列车发展的一个重 要因素。
平原4级碎石路 山区4级碎石路 列车总质量对燃 油经济性的影响
(3)转向机动性 (3)转向机动性
汽车列车的转向机动性 是指在狭窄弯曲路段上改变行驶方向或绕过障碍物的 能力。 最小转弯直径Dtmin 是指汽车列车转向时,当方向盘转到极限位置时,牵 引车外侧前轮所滚过的轮迹圆的直径(有左转弯直径 和右转弯直径)。 最大通道宽度Amax 是汽车列车上离转向中心最远点和最近点的距离之差。
第六章 汽车列车(3-4节)

1820
330
280
(10.00-20轮胎) (10.00-20轮胎)
2430
1210 90~100 ≥30
1150
980
1820
330
280
(10.00-20轮胎) (10.00-20轮胎)
2450
1190 90~100 ≥30
1130
940
1820
340
290
(11.00-20轮胎) (11.00-20轮胎)
b.纵梁和横梁间的连接
横梁和纵梁上下翼缘相连接
优点:有利于提高车架的扭转刚度。 缺点:在受扭严重的情况下,纵梁翼缘产生较大
的应力。 用于半挂车鹅颈区、牵引销处、支撑装置处、悬
架支座处。
b.纵梁和横梁间的连接
横梁仅与纵梁的腹板相连接
这种结构刚度差,允许纵梁截面产生自由翘曲, 不产生约束扭转,由于车架中部扭转变形较小, 多用于车架中部横梁上。
的夹角β。
总质量不大于16t的半挂车前俯
角a不小于14 o ,总质量大于16t 的半挂车前俯角a不小于8 o 。 半挂车后仰角β应不小于8 o 。
α
β
d.牵引车与半挂车之间连接装置互换性尺寸应符 合表6-1的规定。
牵引车 鞍座载 质量 t
半挂车前 悬≤
半挂车前 回转半径≤
半挂车后 间隙半径≤
前段车架总成
后段车架总成
第四节 连接装置
一、连接装置的分类及使用要求
连接装置是实现全挂车与牵引汽车、半挂车与牵引汽 车以及挂车与全挂车之间相互连接的装置。
根据汽车列车的组合形式,连接装置可分为牵引连接 装置和支承连接装置两大类。
牵引连接装置用于牵引汽车与全挂车或挂车与全挂车 之间的连接。主要传递纵向力(包括牵引力和制动 力)。
驾驶证准驾车型对照表
驾驶证准驾车型对照表
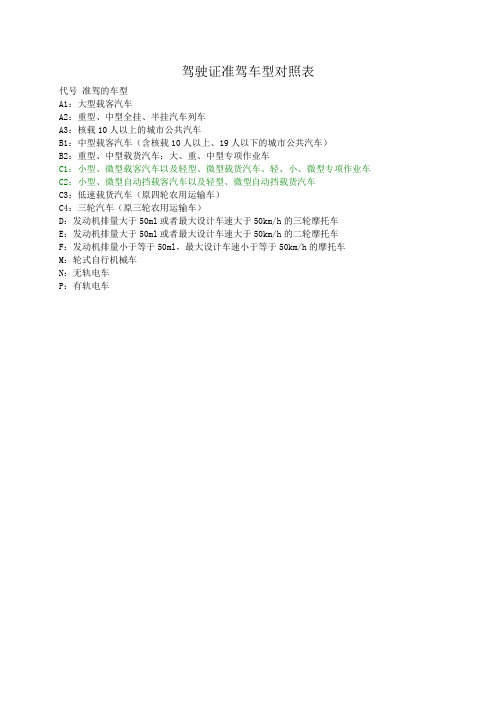
代号准驾的车型
A1:大型载客汽车
A2:重型、中型全挂、半挂汽车列车
A3:核载10人以上的城市公共汽车
B1:中型载客汽车(含核载10人以上、19人以下的城市公共汽车)
B2:重型、中型载货汽车;大、重、中型专项作业车
C1:小型、微型载客汽车以及轻型、微型载货汽车、轻、小、微型专项作业车C2:小型、微型自动挡载客汽车以及轻型、微型自动挡载货汽车
C3:低速载货汽车(原四轮农用运输车)
C4:三轮汽车(原三轮农用运输车)
D:发动机排量大于50ml或者最大设计车速大于50km/h的三轮摩托车
E:发动机排量大于50ml或者最大设计车速大于50km/h的二轮摩托车
F:发动机排量小于等于50ml,最大设计车速小于等于50km/h的摩托车
M:轮式自行机械车
N:无轨电车
P:有轨电车。
美式卡车Peterbilt357三兄弟(三)——半挂自卸列车模型赏析

美式卡车Peterbilt357三兄弟(三)——半挂自卸列车模型赏析作者:暂无来源:《专用汽车》 2015年第6期顾海东摘要:Peterbilt卡车是美式“肌肉”车的典范,凭借其彪悍外形和卓越性能成为美国高速公路的霸主之一。
笔者陆续分三期介绍三款以Peterbilt 357车型为底盘或牵引车的比例模型,从中领略美式重卡的独有魅力。
三辆车用途各异,最后一个登场的是一辆半挂自卸车,形态上与前俩兄弟差别较大,整车由Peterbilt 357牵引车和EAST半挂自卸车组成。
模型精细的做工把半挂车和自卸车厢的特点表现得淋漓尽致。
上两篇出场的俩兄弟均为构建在Peterbilt 357底盘上的刚性卡车,而最后一位登场的则是以Peterbilt 357作为牵引车的半挂汽车列车,整车长度更长,比起他的两个兄弟更加重型化。
模型赏析该款车模(如题首图)同样由美国模型商SWORD Models于2007年出品,比例为1:50,有多个颜色涂装的版本,此处介绍的这款是红色涂装,限量发行500台。
精致的做工和丰富的细节同样体现在这辆车模上,牵引车加上半挂车的组合使其可活动可拆卸的部件更多,可玩性更胜过前两辆模型。
整个模型配色与第二辆刚性自卸车类似,火红的牵引车搭配银灰色的半挂自卸车,活力小清新的形象跃然眼帘。
牵引车和半挂车可以完全分离.下面就从这两个部分剖析整个模型。
l Peterbilt 357牵引车牵引车采用的是6x4型Peterbilt 357底盘,车头与他的前两个兄弟一样均使用了相同的模具,所以外观大同小异,相同细节的具体描述可参见前两篇文章。
1.上部结构方正的车头各处不乏细节,无论是引擎的内构还是驾驶室内外的细节表现均堪称标杆。
前两辆车只配备了单油箱,而这辆车两侧车门下方各有一个油箱(如图1、2),由此可以看出其燃油消耗要大于前两辆车。
驾驶室两侧下方靠后处各有2个横向的小型储气筒(左侧的是水平排列,如图1;右侧的是上下堆叠,如图2)。
半挂汽车列车结构参数估计综述
( 昆 明理 工 大 学 , 昆明 6 5 0 5 0 0 ) ( K u n m i n g U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , K u n m i n g 6 5 0 5 0 0 , C h i n a )
i n v e s t i g a t e d O 1 3 .t h e i r a d v a n t a g e s a n d d i s a d v a n t a g e s .Ap p r o p r i a t e a l g o it r h ms t o e s t i ma t e t h e t r a c t o r — s e mi t r a i l e r v e h i c l e p a r a me t e r s a re i n t r o d u c e d . S o me a p p l i c a t i o n s t a t u s a y e p o i n t e d o u t .
中图分类号 : U 4 6 9
文献标识码 : A
文章编号 : 1 0 0 6 - - 4 3 1 1 ( 2 0 1 4 ) 0 4 — 0 0 4 4 — 0 2
0 引 言
汽车列车介绍
(3)带有可调机构无间隙的牵引钩
在气室作 用下使中心推 杆向右紧靠挂 车牵引杆挂环, 保证牵引钩与 挂环之间在纵 向无间隙。
(4)球销式牵引钩
(5)简单插销牵引钩
(6)球铰式牵引钩
2)牵引架
2.3.5 支承连接装置
用于半挂车,由牵引座和牵引销组成。 1)固定型牵引座 既能承受半挂车 的部分垂直载荷, 又能承受水平载荷 --牵引。
2)半挂车
由牵引车牵引且其部分质量由牵引车承受的挂车。
半挂车的基本组成
半挂车与全挂车相比: 1)本身承受载荷较小; 2)增加了支承装置,便于甩挂或临时支承用; 3)车厢前部通过牵引销与牵引汽车相连接。
全挂车
半挂车
3)长货挂车
专门用于装载普通货车难以装载的超长货物。
2.3
连接装置
是将牵引车与挂车连接起来,组合成汽车列 车的一种联接机构。 2.3.1 作用 1)方便地联接与摘脱; 2)将牵引车的牵引力传给挂车;
1.3
汽车列车的类型
1)全挂汽车列车 (full trailer 而成的汽车列车。 2)半挂汽车列车 由一辆半挂牵引车和 一辆半挂车组合而成的汽 车列车。
1.3 汽车列车的类型
3)双挂汽车
列车
由一辆半挂 牵引车与一辆半挂 车和一辆全挂车组 合的汽车列车。 4)特种汽车列车 具有特殊结构或 装有专用设备的汽车 列车,称为特种汽车 列车。
确定汽车列车总质量应考虑的因素
1)满足汽车列车比功率要求
发动机有效功率与汽车列车总质量的比值。单位为: KW/t Pe Pc GL 一般:不小于4.8KW/t,以5.15-5.88为好。一级公 路和高速公路上:5.88-6.62KW/t
2)在最大坡道上能用头档起步
汽车列车

汽车列车汽车列车汽车列车( combination of vehicles )是由汽车或牵引车和挂车组成的车列。
挂车有两种:全挂车和半挂车。
挂车的总重量由它自身承受的称为全挂车;挂车的总重量一部分由牵引车承受的称为半挂车。
通常全挂车也简称挂车。
目录简介分类1.全挂汽车列车2.半挂汽车列车3.双挂汽车列车4.长货汽车列车相关要求简介汽车列车汽车运输的发展,要求不断提高车辆的承载能力,但普通汽车的轴负荷和外廓尺寸受到公路法规的限制,不可能造得过重过大,于是出现了拖挂形式的汽车列车。
它比普通汽车有较多的轴数和较大的承载面积,因而有较大的承载能力。
载客的汽车列车是由客车和挂车组成。
载货汽车列车按组合形式可分为四种。
分类全挂汽车列车由汽车或牵引车和全挂车组成的汽车列车。
全挂车有单轴的和多轴的,以双轴的使用最为广泛。
全挂车用挂环和拖架或牵引杆同汽车的牵引钩或铰链机构连接。
全挂车多用普通载货汽车牵引,牵引用汽车可摘挂单独行动,灵活性强。
载货全挂车大多为栏板货厢,有的采用平板货台(图1)。
全挂汽车列车行驶稳定性较差,易发生侧向偏摆。
同时转向偏移距(牵引汽车前轴中心轨迹与挂车后轴中心轨迹偏差的距离)较大,挂车的追随性差,不能通过路幅较狭的急弯道。
因此,全挂车的长度不宜过长,在列车中挂车数一般不宜超过2辆。
半挂汽车列车半挂汽车列车由牵引车和半挂车组成的汽车列车。
半挂车的后轴多为单轴,也有2~3轴的,前端有支承连接装置,可与牵引车的后鞍座相连接,使一部分挂车总重由牵引车承载,并将牵引力传递给半挂车。
为适应装载不同的物资,半挂车也有栏板货厢和平板货台两种形式(图2),其前部有平时悬起的支撑装置,摘挂时可放落着地,使挂车稳定停住。
半挂汽车列车的载运量大,行驶时稳定性较好,在汽车运输发达的国家使用日益增多,并向重型和专用化方向发展。
返回目录双挂汽车列车由牵引车和两辆挂车组成的汽车列车。
一般是在一个由牵引车和一辆半挂车组成的列车后面拖挂一个支承转向台车(图3),再在该台车上连接一辆半挂车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J i are defined at each axles (front i = 1 , rear
y K
M 1g
φ 1φ 1
M 2g
K
φ2 φ 2
i = 2 ), respectively. The velocities of the rigid bodies are defined by ( u , vi , ri ) in the horizontal plane and both roll
Fig.3 Equivalent rolling models at front and rear axles
pi and roll angle φ i are given around the roll axis. Assuming bending moment Tb around the vertical
center of gravity (C.G.) to each axle. The unknown moments in Eqs.(2) and (3) are assumed to be linear relation to the yaw and roll difference angles between front and rear axles, i.e. defining the equivalent stiffness
relations with each other. The equivalent parameters, mass M i , yawing moment of inertia inertia
v1
R1
C. G.
M 1 α y1 h1 2S f y
v2
R2
C. G.
M 2 α y2 h2 2S r
I i , rolling moment of
(1, 2 )
Vehicle weight reduction is now the most important requirement to save energy and transportation cost. However, in general, weight reduction often decreases vehicle rigidity and consequently influences on not only ride comfort, durability, etc. but also lateral stability, i.e. steering and handling performance. Therefore in order to compromise safety problems on highways and the weight reduction for energy saving, it becomes quite difficult to optimize many design parameters including the bending and torsional stiffness of vehicle body. It is well known that good lateral stability is quite effective to prevent traffic accidents at high speeds, especially in the case of heavy and large vehicles. If a driver loses his control unfortunately, quite serious damage on driver and vehicles will be caused and then traffic flows will
S , the equations of motions are given at
the both axles as follows: Side-slip :
x0 = [v, r1, r2 , p1, p2 ]T , x1 =[y,ψ1,ψ2,φ1,φ2]T
Yawing:
&1 + ur1 ) = 2 S f − S M 1 (v &2 + ur2 ) = 2 S r + S M 2 (v &1 = aS − Tb I1r &2 = −bS + Tb I2r
& 1 = −Cφ 1 p1 − ( Kφ 1 − M 1 gR1 )φ1 J1 p &1 + ur1 ) − Tt + M 1 R1 (v Rolling: (3) & φ J p C p K M gR ( ) = − − − 2 2 2 φ2 2 φ2 2 2 &2 + ur2 ) + Tt + M 2 R2 (v Where the stiffness Kφ , the damping coefficient Cφ in i i
where
(8)
a, b are the distances from the vehicle
δ f , δ r are the steer angles and ε f , ε r the roll
y and the yawing angle ψ at the
steer-coefficients. In the case of lane change driving, the lateral displacement
K t (φ 2 -φ 1 ) z K t (φ 1 -φ 2 )
φ1
Fig.1 Equivalent model with bending and torsional rigidity
z
φ2
K b and torsional rigidity K t , and furthermore they have no
φ1
z
v1 Y
φ2
v v2 Tb u ψ1 2S r b S Kb Tb
δ1
r1 ψ a
u
M 1,I1 ,J1 x
δ1ห้องสมุดไป่ตู้
r1 Kφ v Kψ v2 M 2,I2 ,J2
δ2
M 1 ,I 1 2S f X
v1
r2
M 2 ,I 2 ψ2
ψ 1 -ψ 2
r2
S
a y
b
x'
Fig.2 Equivalent vehicle model for plane motion
rolling, and the roll arm length Ri are defined around the roll axis respectively, and
S f = C f {δ f + ε f φ f − (v + ar f ) / u} S r = C r {δ r + ε r φ r − (v − brr ) / u}
Analysis and Evaluation of Handling Performance for Heavy Duty Vehicles
Sensitivity analysis of steering responses and a closed loop handling performance
Hiroshi HARADA
Kyushu Institute of Technology Matsuya-Honmachi 1-2-14, Shimonoseki-City, Japan 750-1124 Phone: 81-832-82-0374, e-mail: NHT55082@
Keywords/ Heavy duty vehicles, Driver-vehicle system, Stability, Handling performance, Body rigidity
1.
INTRODUCTION
be disturbed extensively. Therefore, it becomes necessary to establish an objective index to evaluate the handling
(1)
and the inputs w = [δ f , δ r ]T as follows:
&0 = A0 x0 + A M0 x 1x 1+B 0w
(2)
(7)
Here, the front and the rear tire cornering forces are assumed proportional to each slip angle of the contact area at the both axles, and 2 C f , 2 C r mean the summation of cornering stiffness of right and left tires at each axle. Consequently, the linear cornering forces yield as follows: