MATLAB在并联机器人运动仿真中的应用
基于Matlab技术的4_RP_RR_R并联机构的运动仿真
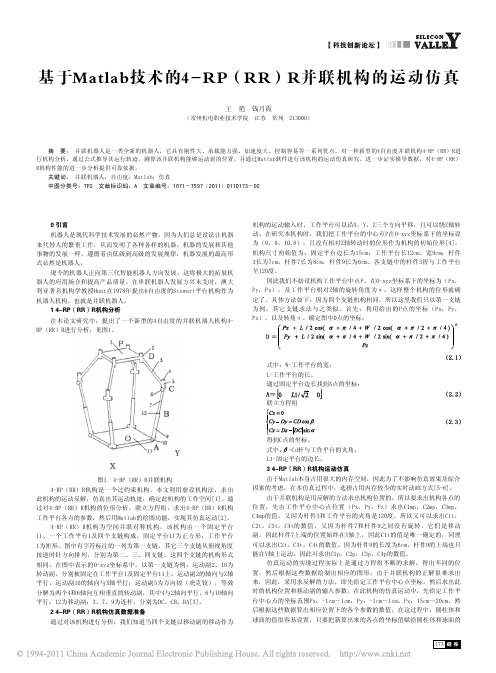
基于Matlab技术的4-RP(RR)R并联机构的运动仿真王 艳 钱月霞(常州机电职业技术学院 江苏 常州 213000)摘 要: 并联机器人是一类全新的机器人,它具有刚性大、承载能力强、加速度大、控制容易等一系列优点,对一种新型的4自由度并联机构4-RP (RR )R 进行机构分析,通过公式推导其运行轨迹,测算该并联机构能够运动到的位置,并通过Matlab 软件进行该机构的运动仿真研究,进一步证实推导数据,对4-RP (RR )R 机构性能的进一步分析提供可靠依据。
关键词: 并联机器人;自由度;Matlab ;仿真中图分类号:TP2 文献标识码:A 文章编号:1671-7597(2011)0110173-020 引言机构的运动输入时,工作平台可以沿X ,Y ,Z 三个方向平移,且可以绕Z 轴转动。
在研究本机构时,我们把工作平台的中心点P 在O-xyz 坐标系下的坐标设机器人是现代科学技术发展的必然产物,因为人们总是设法让机器为(0,0,10.8),且没有相对Z 轴转动时的位形作为机构的初始位形[4]。
来代替人的繁重工作,从而发明了各种各样的机器。
机器的发展和其他机构尺寸初始值为:固定平台边长为15cm ;工作平台长12cm 、宽9cm ;杆件事物的发展一样,遵循着由低级到高级的发展规律,机器发展的最高形3长为7cm ,杆件7长为8cm ,杆件9长为6cm 。
各支链中的杆件3皆与工作平台式必然是机器人。
呈120度。
现今的机器人正向第三代智能机器人方向发展,这将极大的拓展机因此我们不妨设机构工作平台中点P ,在O-xyz 坐标系下的坐标为(Px ,器人的应用场合和提高产品质量。
在串联机器人发展方兴未艾时,澳大Py ,Pz ),及工作平台相对Z 轴的旋转角度为α,这样整个机构的位形就确利亚著名机构学教授Hunt 在1978年提出6自由度的Stewart 平台机构作为定了。
具体方法如下:因为四个支链机构相同,所以这里我们只以第一支链机器人机构,也就是并联机器人。
在MATLAB中进行机器人编程和仿真
在MATLAB中进行机器人编程和仿真机器人编程和仿真在现代科技领域扮演着至关重要的角色。
随着科技的不断发展,人们对机器人的需求也越来越高。
而MATLAB作为一种强大的编程和仿真工具,为机器人领域提供了许多便捷和高效的解决方案。
在本文中,我们将探讨如何在MATLAB中进行机器人编程和仿真,并介绍一些相关应用和实例。
第一部分:MATLAB中的机器人编程基础机器人编程是指为机器人设定行为和任务,使其能够执行特定的工作。
MATLAB为机器人编程提供了丰富的函数库和工具箱,使得编程过程更加简便和高效。
1. MATLAB中的机器人模型首先,在进行机器人编程和仿真之前,我们需要定义一个机器人模型。
MATLAB中的机器人模型包括机器人的几何结构、运动学特性和动力学参数等信息。
通过使用MATLAB中的Robotic System Toolbox,我们可以方便地创建机器人模型,并对其进行各种操作和分析。
2. 机器人运动学分析机器人的运动学分析是机器人编程的重要一环。
在MATLAB中,我们可以使用Robotic System Toolbox提供的函数和工具进行机器人的运动学分析。
例如,可以使用forwardKinematics函数计算机器人末端执行器的位置和姿态,或者使用inverseKinematics函数计算关节的角度和位置。
3. 机器人路径规划路径规划是机器人编程中的核心问题之一。
在MATLAB中,我们可以利用Path Planning Toolbox提供的算法和函数,实现机器人在给定环境中的路径规划。
通过设置起始点和目标点,以及环境的障碍物信息,可以使用MATLAB中的路径规划算法自动生成机器人的轨迹,使其能够高效地避开障碍物并到达目标位置。
第二部分:机器人编程和仿真的应用案例机器人编程和仿真在许多领域都有广泛的应用。
下面将介绍两个典型的应用案例,以展示MATLAB在机器人领域的强大功能。
1. 机器人控制系统设计机器人控制系统是机器人编程中的关键环节。
基于MATLAB的四杆并联机械臂工作空间仿真与分析
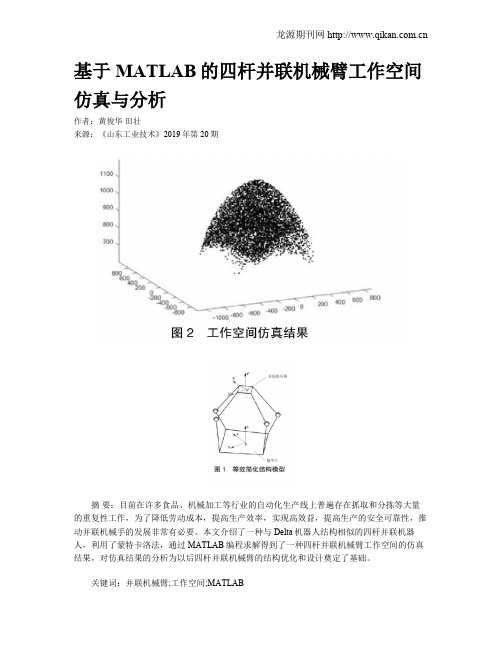
基于MATLAB的四杆并联机械臂工作空间仿真与分析作者:黄俊华田壮来源:《山东工业技术》2019年第20期摘要:目前在许多食品、机械加工等行业的自动化生产线上普遍存在抓取和分拣等大量的重复性工作,为了降低劳动成本,提高生产效率,实现高效益,提高生产的安全可靠性,推动并联机械手的发展非常有必要。
本文介绍了一种与Delta机器人结构相似的四杆并联机器人,利用了蒙特卡洛法,通过MATLAB编程求解得到了一种四杆并联机械臂工作空间的仿真结果,对仿真结果的分析为以后四杆并联机械臂的结构优化和设计奠定了基础。
关键词:并联机械臂;工作空间;MATLABDOI:10.16640/ki.37-1222/t.2019.20.1080 引言Delta型机器人有着闭环并联的拓扑结构,承载能力强、结构强度大、运动精度高,近年来国内外许多学者对Delta型的机械结构进行了研究,在其运动学正解、运动学反解、工作空间和运动轨迹规划等方面取得了许多成果。
本文研究了一种四杆并联机械臂,其结构特点与Delta并联机器人相似,四杆并联机械臂为冗余机构,稳定性得到了提高,适用于大负载、较复杂的工作环境,并联机械臂的诸多优点为其在工业自动化上的应用提供了广阔的发展前景,对四杆并联机械臂的工作空间仿真及分析对其未来的实际应用具有重要意义。
1 四杆并联机械臂的结构模型Delta并联机器人具有三个自由度,其基座平台和运动平台都呈等边三角形,有三个平行四边形机构。
本文研究的四杆并联机械臂与Delta并联机器人有相似之处,即都具有平行四边形机构,且执行机构都具有三个自由度,但四杆并联机械臂的基座平台(即静平台)和运动平台都呈正方形,有四个平行四边形机构,这是它们之间的不同点。
本文设计的四杆并联机械臂等效简化结构模型如图1所示。
2 四杆并联机械臂运动学分析对四杆并联机械臂的运动学分析是求解其工作空间的基础,包括运动学反解分析和运动学正解分析。
简单来说,运动学反解分析就是已知末端执行器的空间位置,求解并联机械臂各驱动电机所需的运动转角;运动学正解分析就是已知并联机械臂各驱动电机的转角,求解末端执行器所在的空间位置。
MATLAB在机器人技术中的应用与实例
MATLAB在机器人技术中的应用与实例I. 引言机器人技术已经成为现代工业和科学领域的重要组成部分。
为了实现机器人在各种任务中的高效执行,需要设计和开发各种算法和控制系统。
MATLAB作为一种功能强大的数值计算和编程环境,为机器人技术的研究和应用提供了许多有力的工具和资源。
本文将介绍MATLAB在机器人技术中的应用与实例,涵盖以下几个方面:机器人建模与仿真、运动规划与控制、图像处理与视觉感知以及机器学习与人工智能。
II. 机器人建模与仿真机器人建模与仿真是机器人技术研究的基础,通过建立数学模型并进行仿真,可以有效评估机器人系统的性能和可行性。
MATLAB提供了一系列机器人建模与仿真的工具包,如Robotics System Toolbox和Simulink Robotics。
我们可以使用MATLAB建立机器人的几何模型和运动学模型,进行正逆解和轨迹规划。
同时,还可以进行动力学分析和控制系统设计。
通过MATLAB,我们能够快速验证机器人设计的合理性,并进行参数优化和性能评估。
III. 运动规划与控制机器人的运动规划与控制是实现机器人任务的关键。
MATLAB提供了众多与运动规划和控制相关的工具和函数,如Robotics System Toolbox和Control System Toolbox。
我们可以利用这些工具进行路径规划、轨迹跟踪和运动控制设计。
例如,我们可以使用MATLAB建立机器人的动力学模型,并利用控制系统设计模块进行控制器设计和参数调整。
此外,MATLAB还支持各种传感器数据的融合与估计,以提高机器人运动的稳定性和精确性。
IV. 图像处理与视觉感知视觉感知对于机器人的环境感知和智能决策至关重要。
MATLAB提供了强大的图像处理和计算机视觉工具,如Image Processing Toolbox和Computer Vision Toolbox。
我们可以利用这些工具进行图像处理、目标检测、特征提取和目标跟踪等任务。
基于MATLAB仿真的机器人运动学建模及控制技术研究

基于MATLAB仿真的机器人运动学建模及控制技术研究机器人的普及与应用越来越广泛,成为了工业自动化的重要组成部分。
但是,如何对机器人进行运动学建模与控制是机器人研究的重要问题之一。
近年来,由于计算机技术的发展,基于MATLAB仿真的机器人运动学建模及控制技术研究得到了广泛应用。
本文将对此方面的研究进行探讨。
一、机器人运动学建模机器人的运动学建模是指利用几何学和代数学知识来描述机器人的运动规律,从而实现机器人的运动控制。
根据机器人的类型,可以采用不同的方法进行运动学建模。
1、串联机器人的运动学建模串联机器人指的是由各种关节通过齿轮、链条等联接的机器人。
其运动学建模主要是研究各关节的角度、速度、加速度等变量与末端执行器之间的关系,从而实现机器人的控制。
这种建模的方法主要基于牛顿-欧拉方法,可以通过MATLAB中的符号化计算实现。
首先,需要对各个关节进行标号,并定义每个关节和基座之间的距离和角度。
然后,可以运用牛顿-欧拉方法来用关节运动学参数表示末端执行器的位置和姿态变量。
最后,通过控制关节运动学参数来控制机器人的运动。
2、并联机器人的运动学建模并联机器人由多个平台和机械臂组成,并联机器人可以同时控制多个执行器,从而实现更高效的工作。
并联机器人的运动学建模主要是研究机器人末端执行器的位置和姿态变量与各个执行器之间的关系。
建模方法主要包括支点变换法和雅可比矩阵法。
其中支点变换法是将并联机器人转化为串联机器人的形式,然后用串联机器人的运动学进行建模。
而雅可比矩阵法则是运用雅可比矩阵来建立机器人末端执行器的运动学模型,从而实现机器人的控制。
二、机器人运动控制机器人运动控制是指根据机器人的运动学模型,利用控制算法控制机器人的运动状态和轨迹。
在控制机器人的运动过程中,主要的控制方法包括开环控制、PID 控制和反馈控制等。
1、开环控制开环控制是一种简单的控制方法,即在机器人刚开始运动时就预设好机器人的运动轨迹和速度。
基于Matlab与Labview的柔索并联机器人监控系统联合仿真
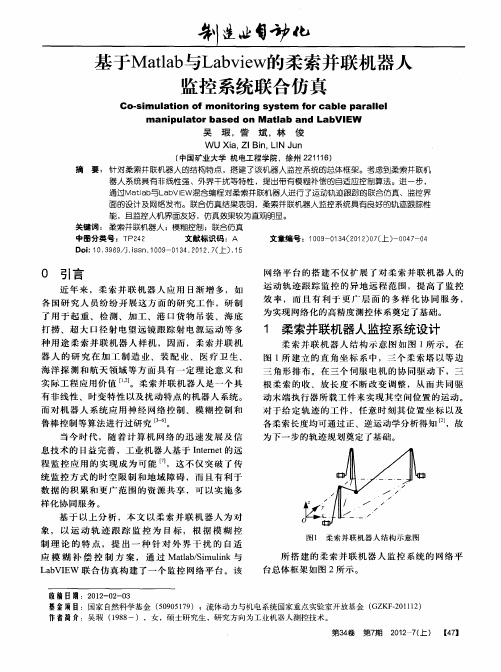
图 3 柔 索并 联 机 器 人 模 糊 控 制 系统 结 构 图
传 感 器 模 块 中 的 接近 传 感 器 是 为 了避 免 末端 执 行 器 与 其 它 部 位 相碰 撞 ,称 重 传 感 器 用 来 测 量 并 限 制 工 件 的 重 量 , 光栅 位 移 传 感 器 用 于 检 测 工 件 当前 在 x、Y、z三 个 方 向上 的实 际运 行位 置 ; 数 据 采 集器 对 传 感 器 信 号 进 行一 系列 调 理 后 传 送 至 本 地 控 制 器 ;本 地 控 制 器 负 责 发 布 监 控 指 令 ,
0 引言
近 年 来 ,柔 索 并 联 机 器 人 应 用 日渐 增 多 ,如
各 国 研 究 人 员 纷 纷 开 展 这 方 面 的研 究 工 作 ,研 制 了 用 于 起 重 、 检 测 、加 工 、港 口货 物 吊 装 、海 底 打 捞 、超 大 口径 射 电望 远 镜 跟踪 射 电源 运 动 等 多
务l
匐 化
基 于Ma a 与L b i t b a ve 柔 索 并 联 机 器 人 l w的 监控系统联合仿真
Co- i ul i oniorng s t sm aton of m t i ys em orcabl ar l f e p al el
m ani pul or based on M at ab an at l d LabV l W E
基于Matlab对3_TPT并联机床的运动学仿真
2 2 2 2 X a + ( Y A - c) + Za 2 ( X a + 3 c/ 2 ) 2 + ( Y 2 + Z2 a + c/ 2 ) a
( Xa -
2 3 c/ 2 ) 2 + ( Y 2 + Z2 a + c/ 2 ) a
图 7 l3 的值域
4 作业空间的确定
并联机床作业空间是其末端执行器的作业区 域 ,它是衡量并联机床性能的重要指标 ,而且其求解 是一个非常复杂的问题 , 依赖于机构位置解的研究 结果 。对 3 - TP T 并联机床 ,当 l1 , l2 , l3 为 L max 时 , 根据并联机床位置反解方程 ( 7) 式可得 : 2 2 2 2 X a + ( Y a - c) + Za ≤ L max
1
= T
XbYbZb
1
i = 1 , 2 , 3
XaYaZa
(6)
2 运动方程的建立
忽略约束机构的影响 , 建立图 2 所示的坐标系 , 机构上下平台的铰链中心点皆按等边三角形布置 , 对应边分别平行 , 两平台相对位置在运动中始终保 持平行 , 没有姿态变化 。
其中 , A′ i 是 A 1 , A 2 , A 3 在 Ob - B 1 B 2 B 3 系中的位置 坐标 ; A i 是 A 1 , A 2 , A 3 在 Oa - A 1 A 2 A 3 系中的位置 坐标 , 根据 ( 3 ) 式和 ( 6 ) 式 , 由两点间的距离公式可 得:
( 7)
式中 , c = R - r , 为动坐标系的原点在基础坐标系 Ob
3-RRC并联机器人运动仿真的MATLAB实现
3-RRC并联机器人运动仿真的MATLAB实现
汪汇
【期刊名称】《机械工程师》
【年(卷),期】2008(000)001
【摘要】文中介绍了基于MATLAB的SimMechanics模块集对3-RRC并联机构进行仿真研究的方法,建立了仿真模型,设置各项参数,进行了该并联机构的运动仿真,得出了正确的结果,并利用虚拟现实工具箱(Vi rtual Reality Toolbox)实现了对3-RRC并联机器人运动的虚拟现实.与其它方法相比,MATLAB最大的优点是无需建立机构运动的数学模型和编制程序,具有系统建模方便直观和仿真功能强大的特点,能大大减轻设计人员的工作,为机械系统的建模仿真提供一个强大而方便的工具.【总页数】3页(P127-129)
【作者】汪汇
【作者单位】安徽理工大学,安徽,淮南,232001
【正文语种】中文
【中图分类】TP242
【相关文献】
1.3-RRC并联柔性机器人的动力学分析 [J], 刘善增;余跃庆;杨建新;苏丽颖
2.新型3-RRC并联机器人机构精度分析 [J], 郭宗和;余顺年;马履中;郝秀清
3.3-RRC型并联机器人动力学分析向量键合图法 [J], 王中双;邹鹤;陶洋洋;杨洪澜
4.基于ADAMS软件的3-RRC并联机器人运动学正解仿真分析 [J], 崔玉秀;田洪
钧;崔炜
5.MATLAB在并联机器人运动仿真中的应用 [J], 梁师望
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的机器人正运动学分析与仿真
基于MATLAB的机器人正运动学分析与仿真机器人正运动学是研究机器人的位置、速度和加速度等参数与关节输入之间的关系的一门学科。
它是机器人控制中的重要环节,可以用于描述机器人的位置和方向,以实现准确的运动控制。
MATLAB作为一种强大的数学建模和仿真工具,被广泛应用于机器人正运动学的分析与仿真。
首先,机器人正运动学的分析就是要通过数学方法,推导出机械臂的运动方程。
MATLAB提供了丰富的数学工具箱,可以方便地进行符号计算和数值计算。
比如可以使用符号计算工具箱中的符号变量、方程求解函数等,来推导出机械臂各关节的位置、速度和加速度的表达式。
同时,MATLAB还可以使用数值计算工具箱中的数值求解函数,来求解非线性方程组,解决复杂的运动学问题。
其次,机器人正运动学的仿真是为了验证分析结果的正确性,以及探究机械臂的运动规律。
MATLAB提供了强大的图形界面工具,可以直观地展示机器人的运动过程。
比如可以使用绘图函数来绘制机器人的坐标系变换图,显示机械臂各关节的位置和方向。
同时,还可以使用动画函数来模拟机器人的运动过程,使得机器人在三维空间中实现真实的运动效果。
此外,MATLAB还可以使用仿真工具箱中的物理建模模块,对机器人进行动力学仿真,分析机械臂的工作空间、负载能力等性能指标。
最后,基于MATLAB的机器人正运动学分析与仿真,还可以应用于机器人轨迹规划和路径优化。
通过MATLAB的优化工具箱,可以对机器人的运动轨迹进行求解,找到满足特定要求的最佳路径。
同时,还可以使用MATLAB的控制工具箱,设计机器人的控制器,实现对机械臂的精确控制。
总之,基于MATLAB的机器人正运动学分析与仿真,能够方便、快捷地推导出机械臂的运动方程,并验证运动规律的正确性。
同时,还可以使用MATLAB的图形界面工具和仿真工具箱,进行机器人的可视化展示和动力学仿真。
此外,还可以应用MATLAB的优化工具箱和控制工具箱,实现机器人的轨迹规划和精确控制。
Matlab技术在机器人控制中的应用方法
Matlab技术在机器人控制中的应用方法机器人控制是一个日益重要的领域,掌握先进的技术方法对于提高机器人控制系统的性能至关重要。
在这方面,Matlab已经成为了一个不可或缺的工具。
本文将讨论Matlab技术在机器人控制中的应用方法。
一、机器人建模与仿真机器人建模是机器人控制的基础,它可以帮助我们理解机器人的动力学和运动学特性。
Matlab提供了丰富的工具和函数,可以方便地进行机器人建模和仿真。
首先,我们需要确定机器人的运动学方程。
通过使用Matlab的符号计算工具箱,我们可以轻松地推导出机器人的正向和逆向运动学方程。
这些方程可以帮助我们理解机器人的关节角度和末端执行器的位置之间的关系。
接下来,我们可以使用Simulink模块来进行机器人的动力学仿真。
Simulink提供了方便的仿真环境,可以帮助我们模拟机器人在不同控制算法下的运动轨迹和力学性能。
此外,Simulink模块还可以与实际硬件相连接,实现机器人的实时控制。
二、运动规划与轨迹控制机器人的运动规划和轨迹控制是机器人控制中的核心问题。
Matlab提供了多种方法和工具,可以帮助我们实现高效、精确的机器人运动规划和轨迹控制。
首先,我们可以使用Matlab的优化工具箱来解决机器人的运动规划问题。
通过定义合适的目标函数和约束条件,我们可以使用优化算法来寻找机器人最优的运动轨迹。
这样可以帮助机器人在复杂的环境中快速而安全地移动。
其次,Matlab还提供了PID控制器设计工具。
通过分析机器人的动力学特性和环境的反馈信息,我们可以使用PID控制器来实现机器人的轨迹控制。
PID控制器具有简单、稳定的特点,在机器人控制中得到了广泛的应用。
三、传感器数据的处理与融合机器人控制离不开传感器的支持,而传感器数据的处理与融合又是一个复杂的问题。
Matlab提供了许多用于传感器数据处理的函数和工具箱,可以帮助我们提取、滤波和融合传感器数据。
首先,我们可以使用Matlab的图像处理工具箱处理机器人的视觉传感器数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MAT LAB 在并联机器人运动仿真中的应用
Application of MAT LAB in K inem atics Simulation of P arallel R obot
梁师望
(东华大学机械工程与自动化学院,上海,200051)
摘 要:对并联机器人的坐标分析进行了详细的讨论,然后用M AT LAB 实现了运动仿真。
按照要求的运动轨迹将并联机器人的运动全过程在计算机上直接显示出来,从而解决了运动可视化问题。
关键词:坐标分析 M AT LAB 运动仿真
Abstract :Have a discussion about coordinate analysis of a parallel robot in detail.Then birng kinematics simulation to true with the help of M AT LAB.S o succeed in displaying the m ovement of a parallel robot on the screen according to its re 2quired track.
K eyw ords :coordinate analysis M AT LAB kinematics simulation
1 前言并联机器人是一种较新的机器人,它刚度大,承载性能好,精度高,可广泛应用于工业、航空、军
事等领域[1]。
在以往的分析中,为了讨论它的性能,需要了解它的运动,但却很难直接观看它的运动过程。
本文运用MAT LAB 软件,成功地解决了并联机器人运动可视化问题。
只要运行文中的程序,便可以得到并联机器人的动画,并可以作任意角度的观察,还能消隐/非消隐,有利于全面掌握并联机器人的运动特性。
2
坐标分析
图1 并联机器人坐标分析
图1是两个参考系,O 2XYZ 是定平台参考系,
O 12X 1Y 1Z 1是动平台参考系。
我们容易等到矢量方程:
R +Q =r =P +L
即L =R +Q -P
R 是上平台中心点O 1的坐标,它是由要求的
运动所确定的,P 是下平台上某一点的坐标,也可
确定。
Q 是动平台中的原始向量(即动平台三轴平行于定平台三轴时的向量)分别绕X 、Y 、Z 轴
旋转Ψ、
θ、Φ三个角度而形成的。
具体求解可用下列变换矩阵:
[X 1Y 1Z 1]=[XYZ ]1 0 0
0 cos Ψ sin Ψ
0 -sin Ψ cos
Ψ
cos θ 0 -sin θ0 1 0sin θ 0 cos θ
cos Φ sin Φ 0-sin Φ cos Φ 0 0 0 1 式中(X 1Y 1Z 1)表示转变后的坐标,(XYZ )表示转变前的坐标(相当于Q 在O 2XYZ 处于原始状态时的动坐标),面三个三阶矩阵,则分别表示向量绕X 轴转Ψ角、绕Y 轴转θ角、绕Z 轴转Φ角的矩阵式。
这样,可求得Q ,因此L 就可以求了。
3 MAT LAB 坐标计算程序
接下来,可以用MAT LAB 来进行坐标分析计算了。
在这之前有必要先简单介绍一下MAT LAB 软件的特点,并且制作一个界面程序。
MAT LAB 是一个非常优秀的工程软件,由美
65机电一体化 Mechatronics 2000年第6期
国MathW orks 公司推出[2]。
由于种种原因,MAT 2LAB 在我国没有广泛流行,但由于矩阵分析及计算是MAT LAB 的老本行,因此将MAT LAB 应用于并联机器人坐标分析计算是再方便不过了。
首先,建一个界面程序,取名R obot.fig ,具体操作略去,结果如图2所示(也可以根据自己的喜好来制作)。
图2 界面程序
接下来,在“坐标计算”的Callback 中,输入源
程序(由于篇幅有限,此处不便给出,感兴趣的读者可发Email 到lsw2100@ 与作者联系,下面“动画显示”程序的源代码以及部分运动轨迹的数据生成程序也可一并索取)。
这样,坐标计算程序就做好了。
现在,需要有一个输入文件input.dat 。
做这个文件很简单,只要注意以下的格式就行:X 坐标Y 坐标Z 坐标Ψ转角θ转角Φ转角,每一行为一组数据,十分清晰,比如给出一个input.dat 文件如下:
00100000.0000000100000.0174500100000.03491…………………
00100001.04720
这个文件表示上平台绕Z 轴旋转60度角,
每一步是1度。
注意,要用弧度表示(在此需要说明一点:由于运动千变万化,因此每一种运动轨迹都要编制相应的input.dat ,作者已经制作了几种运动轨迹的数据生成程序,可以提供给大家)。
4 MAT LAB 运动仿真
以上程序运行后将得到一个输出文件coor2.dat ,该文件是进行运动仿真的输入文件。
在“动画显示”按钮的Callback 中,加入一段程序(此处亦省略)。
这样,R obot.fig 文件就做好了。
先保存一下,然后再打开,出现主界面如图2,按下“坐标分析”,确定input.dat 的路径,过一小会便完成了数据计算,生成coor2.dat 。
现在按下“动画显示”按钮,确定coor2.dat 的路径,屏幕中便显现出运动的并联机器人。
图3是运动过程的一个截面图,视觉效果还可以,而且由于MAT LAB 功能强大,还能作任意角度的观察,此处不再赘述。
图3 运动仿真
5 结论
(1)对并联机器人的坐标分析进行了详细的
讨论,并给出了用MAT LAB 来计算的源程序。
(2)用MAT LAB 实现了并联机器人的运动仿真,并给出了源程序。
(3)用MAT LAB 实现了按照要求的运动轨迹将并联机器人的运动全过程在计算机上直接显示出来,解决了运动可视化问题。
参考文献
1 黄真,孔令富,方跃法.并联机器人机构学理论及控制.机械
工业出版社,1996
2 程卫国,冯峰,姚东,徐昕等.M AT LAB5.3应用指南.人民邮电
出版社,1999
3 施小龙,葛玉宝,邓明辉.BorlandC ++3.1百科大全.学苑出
版社,1994
7
5M AT LAB 在并联机器人运动仿真中的应用。