摄影测量成图生产流程
数字摄影测量生产DLG工作手册
数字摄影测量生产DLG工作手册(初稿)说明:本手册适用于不动产统一登记基础数据建设项目1 准备工作1.1人员准备参与该项目测图生成的技术员需熟读《湖南省不动产统一登记基础数据建设2000工作底图制作项目设计书》和《数字摄影测量生产DLG工作手册》。
生产之前测图一定面积的成果,经检查合格之后参与正式生产。
1.2软件准备用于立体测图的软件事先要进行检测,不能因为软件本身的技术问题和稳定性影响成果的精度。
1.3硬件准备用于立体测图的计算机、3D眼镜、手轮脚盘等需要进行检查,确保仪器可以正常使用,数据存储稳定。
1.4工作环境准备专业设备和仪器都很昂贵,在使用和保管时注意维护,要求工作环境集中独立,通风干燥。
1.5数据准备根据任务情况把相应2013年变更调查数据、农村集体土地所有权确权数据、空三成果数据拷贝到服务器集中存放。
2 测图原则1、严格依据已划定的1:2000工作底图范围线采集,如为地物表示完整需要外扩等特殊情况,须将范围线修改并提交。
2、作业前,需对全数字摄影测量工作站软硬件进行检查,状态良好时方可作业。
所有提交的数据文件必须是由摄影测量工作站采集而成。
数据采集时,作业员应根据航片和底图进行对照自检,确定数据采集是否有遗漏、重复和矛盾的地方。
若发现问题应及时补测、重测,以确保原始数据的准确无误。
3、数据采集以村级行政区划为单位进行,确保宗地不存在重复采集情况。
4、建筑物严格沿外边缘采集、房屋的直角型拐角必须严格正交采集。
5、测绘地物、地貌要素时,应选取与其形状、特征和性质相符的符号代码,观测时应正确选取并切准地物、地貌的中心或边缘、直线和曲线方向变换处,做到无错漏、不变形、不移位。
6、范围线内各地籍相关要素采集完整,等高线、管线设施等不采集,水泥坪及坎上应适当采集高程点。
所有要素不需要构面处理,但不能存在不合理的悬挂、自交叉等拓扑错误。
7、其他参考国家相关规范标准文件和发证办相关文件规定。
3 技术流程DLG生产技术流程图4 测图内容及方法在全数字摄影测量工作站下,导入空三加密成果和测图范围线,恢复航摄数字影像的立体模型,按照1:2000地形图要求和本项目相关技术规定,在立体环境下采集各相关要素,生成图形文件。
数字正射影像图生产工艺流程

数字正射影像图生产工艺流程本文介绍了数字正射影像图生产的工艺流程,包括卫星影像和航空影像的总体生产流程。
资料准备是第一步,需要收集原始影像、DEM数据以及控制资料等。
在进行像控测量时,像控点的平面位置中误差和高程测量中误差有一定的规定要求。
接下来是外参数解算,需要根据卫星影像提供的RPC参数,结合地面控制点(或基于已有高精度DOM匹配)、DEM数据,采用区域网平差的方法解算外参数。
解算时需要注意控制点的分布和网间公共点平面较差的要求。
完成区域网平差后,进行数字正射纠正处理。
纠正过程中不得对影像的灰度和反差进行拉伸,不改变像素位数。
纠正后的正射影像有效数据范围内没有漏洞区。
全色影像按照有理多项式方程以整景方式纠正,重采样采用双线性插值或卷积立方的方式。
多光谱影像与全色影像配准纠正。
最后是影像融合、匀光匀色、镶嵌裁切、图像精编和分幅数据等处理。
其中影像融合需要注意不同波段之间的配准和融合方法的选择。
匀光匀色需要根据实际情况进行调整,以保证影像的视觉效果。
镶嵌裁切需要考虑到数据的连续性和完整性。
图像精编需要进行边缘平滑和噪声抑制等处理。
最后是分幅数据的生成,要求分幅边缘无重叠,无缝隙,且分幅后的数据质量应与原始数据相同。
总之,数字正射影像图生产的工艺流程需要严格按照要求进行,以保证产生的数据质量和精度符合要求。
为了将多光谱影像与全色影像配准纠正,需要以纠正好的全色影像为控制基础,选取同名点对多光谱影像进行纠正。
纠正模型的选取以及DEM数据选择与对应的全色影像一致,同名点的选取一般每景影像不少于15个,且均匀分布在整景范围内。
同名点的量测精度要求达到多光谱影像的子像素精度。
为了保证融合效果,配准纠正的控制点残差中误差原则上应不超过1个多光谱影像像素。
纠正后应进行多光谱影像和全色影像的套合检查,两景影像之间的配准精度不得大于1个多光谱影像像素,典型地物和地形特征(如山谷、山脊)不能有重影。
如果达不到配准精度要求,应增加控制点重新纠正。
摄影测量成图生产流程

摄影测量成图生产流程摄影测量是将照片转化为成图并测量地面特征的技术。
摄影测量可以用于制图、地形分析、环境监测等领域。
本文将介绍摄影测量成图的生产流程。
1. 摄影测量原理摄影测量原理基于三角测量和相似性原理。
三角测量是指通过测量角度和边长得到三角形的大小和形状。
相似性原理是指两个物体在相同缩放比例下,它们的相对大小和形状将保持不变。
通过这些原理,摄影测量可以将照片转化为测量数据,并使用这些数据绘制地图。
2. 拍摄准备在进行摄影测量之前,需要进行一些准备活动。
首先,需要选择合适的时间和天气条件进行拍摄。
最好选择无云、无雾、阳光明媚的天气,这样可以得到清晰的图片。
其次,需要选择合适的相机和摄像机角度,以便在后续处理中获得准确的成像数据。
3. 图片采集在进行摄影测量前,需要采集一些图片。
采集的图片应该包含目标地区的所有角度和视角,以便后续处理。
采集的图片应该使用高分辨率相机拍摄,以便后续处理使用。
4. 图片处理完成图片采集后,需要对图片进行处理。
这个部分的工作包括图像的纠正和处理。
图像的纠正是指使用传统的纠正方法,去除那些影响成像正确性的因素影响,比如非正交和人为变形等。
而图像处理则是对图片进行处理,比如图像增强、噪声抑制、图像分割、点提取、场景恢复等。
处理完成后,可得到经过处理的高清图像。
5. 三维模型制作完成了图像处理,下一步就是进行三维模型制作。
三维模型制作是通过将采集信息引入三维建模软件,并利用软件自带的工具进行扫描、图像分割、形状重建、立体匹配、模型拼接等技术来进行。
成功建立三维模型后,可以使用 CAD 或 GIS软件来进行进一步编辑和分析。
6. 建立控制点和坐标系在建立三维模型后,需要准确地建立控制点和坐标系。
控制点是指在三维模型上的点,在制图时可以用来确定图像或物体的位置和大小。
坐标系是指建立在学习场地内部的坐标系。
只有建立好了控制点和坐标系后,才能够进行后续成图工作。
7. 成图流程完成图像纠正、图像处理、建立三维模型并建立控制点和坐标系之后,就可以进行成图。
测绘生产与服务基本流程图

地形测绘
地形测量 数据编辑 成果检查与整理
成果整理与上交
页脚
..
五、不动产测绘地籍测绘生产作业工艺流程:
生产准备
项目合同
项目成果(产品)实现策划 测区测区踏勘、收集分析资料、安全状况了解等 专业技术设计 作业参与人员的技术与安全生产等培训 仪器设备、工具等的准备与检较
项目生产任务计划与下达
控制测量
用户试用与维护 成果整理与上交
页脚
..
三、摄影测量和摇感生产作业工艺流程
生产准备
项目合同
项目成果(产品)实现策划 航摄、像控、调绘等资料分析 专业技术设计 作业参与人员生产技术等培训
项目生产任务计划与下达
全数字解析空三加密
影像列表及内定向、相对定向 像控点、加密点、检测点量测 区域网平差计算 区域网接边 成果检查及整理
..
测绘生产与服务基本流程
一、测绘生产作业工艺流程:
项目合同
生产准备
项目成果(产品)实现策划 测区测区踏勘、收集资料、安全状况了解等 专业技术设计
项目生产任务计划与下达
作业准备
作业参与人员的技术与安全生产等培训 仪器设备、工具等的准备与检较 生活用品、常备药品等的准备
选点、埋石
成果检查
GPS 测量与计算
计算 成果整理与上交
页脚
..
二、地理信息系统工程生产作业工艺流程:
项目合同
生产准备
项目成果(产品)实现策划 测区测区踏勘、收集资料、安全状况了解等 专业技术设计
项目生产任务计划与下达
作业准备
作业参与人员的技术与安全生产等培训 仪器设备、软件等的准备与检较 资料分析
数据整合处理 系统开发测试
virtuoZo,武汉适普数字摄影测量系统操作流程

2. 引入影像
SUPRESOFT
选择“文件--引入--影像文件”;见图5: 在弹出的对话框中填入相应的参数,如相 加参数文件、影像是否反转、转换的原始 数据格式类型、影像的扫描分辨率(若不 知道原始影像的扫描分辨率,可在此栏中 输入参数-1,部分原始影像的扫描分辨率 可直接从影像中获取)等参数,然后载入 相应的原始影像文件,编辑影像的输出路 径,即可开始转换;见图6:
SUPRESOFT
7. 设置成果输出参数
选择“设置--DEM参数”;见图16 在弹出的对话框中将缺省显示DEM的输出路径及文件名为 “模型名\product\模型名.DEM”,输出的DEM范围为当前 型的核线影像范围(设定范围为(-999999,999999)∽(999999,999999)),DEM格网间距及旋转角与测区所设一 致,缺省输出DEM保留一位小数(整型存储格式),参与 输出DEM的为当前模型;用户可根据实际情况选择其他的 输出路径及输出文件名、设定DEM的输出范围、格网间距 及旋转角、DEM的小数保留位数(浮点型存储格式;最多 仅保留7位小数)、选择多个模型生成DEM(此时会在每 个模型下生成当前模型的DEM,然后对每个模型的DEM进 行自动拼接,生成一个拼接后的DEM);见图17
3. 建立模型
SUPRESOFT
打开主界面程序,选择菜单“文件--打开模型”; 见 图7 在弹出的对话框中输入相应的模型名,即可新建一个 模型,也可选择一已存在的模型打开;见图8 若为新建一模型,输入相应的模型名确认后,将出现 如图9所示的对话框;填入相应的模型路径、左右影像 文件路径及文件名、临时文件存放路径、产品文件存 放路径等参数后确认即可; 模 若要对建立的模型参数进行修改,可选择“设置-- 型参数”;见图9′,将弹出如图9所示对话框,可对此模 型参数进行修改;
DEMDOMDLG生产流程
1.数字立体摄影测量生产DLG方法
航摄负片
象片参数
象片扫描
控制点坐标
象对定向
立体测绘地物
脱机编辑
符号化 与制图整饰
矢量数据库建库 绘图或刻盘 质量检测与元数据文件 记录
2.地图扫描矢量化或手扶跟踪数字化
地图扫描矢量化或手扶跟踪数字化 地图扫描矢量化或手扶跟踪数字化技术 还比较成熟,作业流程如下:
全要素地形图
等高线版地形图
地图扫描 人机交互等高线矢量化 加测注记点
地图扫描 等高线自动矢量化 加测注记点
等高线高程赋值与检查
周边等高线地图的数据获取
构造三角网
内插DEM格网
DEM建库与刻盘
质量检测与元数据文件记录
二、数字正射影像的生产流程
数字正射影像的生产根据不同的数据源 和不同的设备有下面几种生产工艺。 1.全数字摄影测量方法 与前面所述的全数字自动摄影测量和 交互式数字摄影测量方法相一致,由数字 摄影测量工作站直接生成数字正射影像, 工艺流程如下:
第二种是点栅格观点:认为该网格单元 的数值是网格中心点的高程或该网格单 元的平均高程值,这样就需要用一种插 值方法来计算每个点的高程。
规则格网的优点:
数据结构简单,很容易地用计算机 进行处理,特别是栅格数据结构的 地理信息系统。 很容易地计算等高线、坡度坡向、 山坡阴影和自动提取流域地形,使 得它成为DEM最广泛使用的格式。
遥感数据
控制点坐标
数字影象几何纠正
数字影象处理与融合
数字影象镶嵌
地名注记与 图廓整饰 数字正射影象 数据库 绘图或刻盘 质量检测与 元数据文件记录
三、数字线划图(矢量型)的生产工艺
无人机(AVIAN)低空摄影测量作业流程
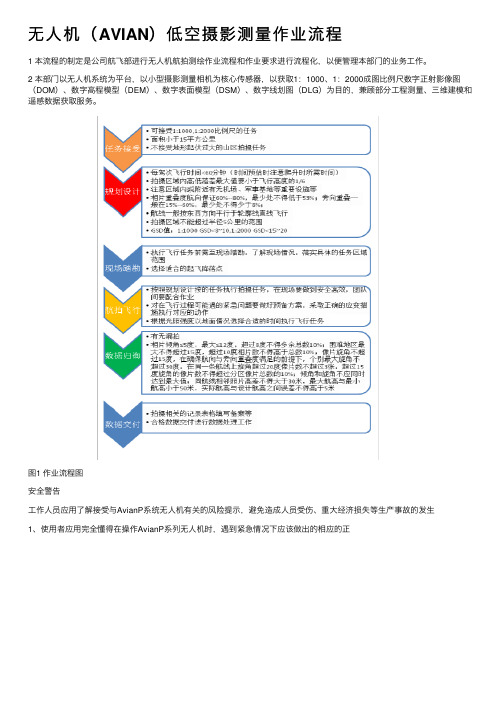
⽆⼈机(AVIAN)低空摄影测量作业流程1 本流程的制定是公司航飞部进⾏⽆⼈机航拍测绘作业流程和作业要求进⾏流程化,以便管理本部门的业务⼯作。
2 本部门以⽆⼈机系统为平台,以⼩型摄影测量相机为核⼼传感器,以获取1:1000、1:2000成图⽐例尺数字正射影像图(DOM)、数字⾼程模型(DEM)、数字表⾯模型(DSM)、数字线划图(DLG)为⽬的,兼顾部分⼯程测量、三维建模和遥感数据获取服务。
图1 作业流程图安全警告⼯作⼈员应⽤了解接受与AvianP系统⽆⼈机有关的风险提⽰,避免造成⼈员受伤、重⼤经济损失等⽣产事故的发⽣1、使⽤者应⽤完全懂得在操作AvianP系列⽆⼈机时,遇到紧急情况下应该做出的相应的正●测试马达时请远离转动的螺旋桨的前⽅和切线⽅向,测试⼈员建议使⽤适当的⾐物和眼罩●详细了解如何设定归航点、调整⽆⼈飞机载具的重⼼、降落伞的叠折与装置●连接电池时请正确连接电源的正负极,反接会造成电池爆炸甚⾄设备的损毁●请不要在⽆⼈值守的情况对电池充电;不要使⽤⾮原⼚⽣产的充电器设备●不要对空速管直接吹⽓,太⼤的压⼒会造成空速器损坏⼀、任务接受1、收集任务测区的资料:图件与影像资料(地形图、规划图、卫星影像、航摄影像等);地形地貌、⽓候条件;机场、军事基地等重要设施等2、通过收集的资料判断设备是否适应摄区环境;是否具备空域条件。
3、选择执⾏任务的飞机型号⼆、任务规划1、通过⽤户提供的界址坐标信息,在⾕歌地球软件上将任务区域的范围标注并突显出来,同时将区域范围内及周边区域的图址信息缓存到本地并记录下任务区域内最⾼点的海拔值做为在任务规划时使⽤。
2、运⾏飞控软件进⾏任务规划设计。
在满⾜精度要求和飞⾏安全的前提下,任务规划需要合理安排归航点的位置;合理做好重叠、航⾼及地⾯分辨率;以下是在做规划时需要注意的三、任务飞⾏导控站架设:展开三脚架,固定好;三脚架安装天线(U-BAND,S-BAND)两种天线;UBAND天线连接线,⼀端连接UBAND天线,⼀端连接地⾯导控站PA设备;建议90度弯曲⼀端连接导控站,另⼀端连接天线;(两端接⼝⼀样)SBAND天线连接线,⼀端连接SBAND天线(⼤⼝);⼀端连接地⾯导控站PA设备;导控站后端(右下⾓环状卡⼝)供电装置连接Y型线后连接蓄电池供电;导控站后端⽹线连接笔记本电脑⽹线接⼝;接通电源前确认开关都在OFF位置;飞机组装:安装飞控系统模块在机⾝前端(四个接头分别与机⾝对应接头连接,最后⽤螺丝⼑安装飞控顶部的连接线),安装完成后,压紧与机⾝密合住;安装电池(含空电及动⼒电,将两部分电池粘在⼀起,注意将动⼒电检测线与空电电源线分开,最好绕到后⾯,以免插错),安装空速管(空速管固定到机⾝前端,开⼝朝前⽅),飞控软管最后要套上空速管钢管安装飞机天线安装机翼,注意舵⾯⼩⾦属卡⼝要对准机⾝相应位置,密合好后,插上固定插销安装垂尾,⽤胶布粘帖,注意导控站型号与垂尾型号⼀致,否则不能接收信号;安装机头,检查空拍相机电池是否已充好,相机安装SD卡,相机顶部飞⾏记录设备安装相应的SD卡,确认后将空拍照相机对准相应的卡槽,拧螺丝固定;然后⽤胶布粘帖机头(线横向贴两边,再纵向贴两边确保牢固)降落伞安装,需要检测线头是否有打结,如果出现,需要将线理顺,然后将12⽚全部整理整齐,分两边各12⽚放好,将线折起,放⼊整理好的伞⽚中部位置,仅留下⽩⾊连接线露出伞外;然后分别从两边往中间者成三段,将线包住,最后纵向将伞折为5段,放⼊降落伞槽中;测飞机平衡,双⼿中指分别托住飞机机翼下⾯的两个检测点,将飞机托起,检测飞机机⾝是否与地⾯平⾏,如果不平,调整电池位置,达到最终平衡注意要点:注意舵⾯的平整,机⾝结构是否有损;伞上⽪筋是否已去除;伞是否已与伞盖扣上;机翼与机⾝连接处顶端最好贴上胶条平衡⼀定要检查机站联测:将飞机放在距地⾯站5⽶以外地⾯导控站通电后,⾸先开启power,接通会显⽰蓄电池电压;打开电脑,进⼊飞控界⾯,确认飞机上空电开启PA(上中下三排开关中第⼀排开关),检测所有等变为绿⾊,⽅可进⼊下⼀步;如果上下链不正常,检查垂尾电路是否连接好(上空电后,应该可在垂尾听到声⾳,有红⾊灯显⽰);检查是否需要做变频调整。
第二章DEM的数据获取

(5)选择性采样
选择地性线及地形特征点采点。
特点:
(a)点的分布和密度与地形最匹配,数据 冗余度最小。
(b)作业效率低,不易实现自动化作业。
(6)混合采样
选择性采样+规则采样(或渐进采样)
形成
附加地形特征的 规则格网DEM
沿特征附加三角网的 混合格网(Grid-Tin) DEM
地形特征点 单独存贮
地形图比例尺与等高距关系为:
1:20万
25~100m
1:10万
10~40m
1:5万
10~20m
1:2.5万
5~20m
1:1万
2.5~10m
通常Байду номын сангаас为高程精度达三分之一等高距。
由地形图获取DEM数据的特点
➢ 需有合适的地形图(比例尺、时间) ➢ 数据质量依赖于原图质量 ➢ 数字化会降低原图精度 ➢ 数据现势性通常较差 ➢ 是丰富而廉价的数据来源
➢ 摄影测量是DEM重要的数据源,是进行数据库更新的重要方式之 一
➢ 现有地形图是DEM的另一重要数据源,经过大量的实践证明,从 等高线地形图生产DEM的方法已经成熟,可以广泛应用于生产
➢ 使用激光扫描、干涉雷达等新型技术进行DEM数据采集是很有发 展前景的DEM采集方式
➢ 不论从何种数据源获取DEM数据,在采集等高线或规则格网的同 时采集重要的地形特征点线是保证DEM质量和提高工作效率的重要 措施
对每个扫描像元探测记录地表辐射值形成影像。 同时测出像元a至地表的斜距,由已知的影像外方位 元素(GPS+IMU系统测得)推算得A点的地面坐标, 形成DEM。
s
a p
o
A
(2)基本结构组成
影像
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
公司的生产流程1、概述航空摄影测量是以分析、判读和量测航空摄影像片为基础,确定所摄地面目标的性质和空间位置,并以一定的比例尺表示在图上的一门学科。
咱们单位是一个以航空摄影测量为主,其他种类测量为副的多元化公司.所涉及的工程范围有●地形图测量●基础控制测量(GPS测量、三四等水准测量)●航空摄影数字化测量(一般航测数字化地形测图)(DLG)●全野外数字化测图(DLG)●正射影像图测量(DOM)●数字地面模型(DEM)●专题图测量●公路图测量●地籍调查与测量●土地利用现状调查与测量●房产调查与测量●城市部件调查与测量另外还涉及到一些国际项目,如巴西、香港、西班牙、美国、加拿大等国家和地区的一些项目。
本次培训的目的主要是让大家对航空摄影测量的整个流程及一些基本概念有个初步了解。
下面由我给大家简要介绍一下公司的生产流程。
2、公司的航测生产流程3、流程各阶段的主要任务3。
1 前期技术准备:项目合同签订以后,技术管理人员应该到测区完成两个任务:第一项任务是了解甲方需求,完成工程的技术交底.现场进行踏勘,了解当地的人文地理环境、气候情况、交通状况、地质地貌特点、地物复杂程度等,并和用户进行技术上的沟通,确定所要使用的坐标系统、中央子午线、投影面高程、高程系统、基本等高距、图幅分幅规格及图号编排、数据格式等,并询问用户有无规范之外的特殊要求。
第二项任务是收集已有成果及图件,为工程技术设计提供资料。
同时向用户收集有关资料:测区基本用图(1:10000、1:50000地形图)测区范围、已有控制点成果(平面控制点和高程控制点)、点之记。
随后即可编写技术设计书。
3.2 航摄技术设计书与航空摄影:有关资料收集到受益后,摄影公司即可编写航摄技术设计书,根据工程任务挑选合适的摄影仪器,按照合同要求选择合适的摄影比例尺对整个测区进行航空摄影,获取合格的航空摄影像片。
3。
3 航测内外业技术设计书:根据现场踏勘及技术沟通情况,并依据合同内容,技术科应尽快编写内、外业技术设计,确定整体施工方案,及时安排外业队外出测区作业,这样才能尽快拿出外业成果,提交内业工序作业,这样也才能够保证工期。
应该优先完成外业设计,内业设计在内业开工之前完成即可。
3。
4 航测外业:航测外业主要包括基础控制测量、像片控制测量、像片(纸图)调绘、碎部测量(野外补充测量)。
外业成果是整个航测工程的基础资料,外业成果的可靠与否直接影响整个工程的质量,一定要严格按照技术设计作业。
3.4.1 基础控制测量:一般情况下,测区已有高等级的控制点数量有限,分布也不是很均匀,难以满足航测成图要求,这就要求适当加密一些基础控制点,在此基础上再进行像片控制测量和碎部测量.目前基础控制测量主要采用GPS快速静态定位方法或光电测距导线测量。
测量完后一定要认真检查原始观测记录手簿,没有错误方可进行计算,一定要确保测量成果的精度合乎规范要求。
3.4.2 像片控制测量:像控点包括平高点、平面点、高程点三种。
要建立立体模型,必须以像控点为基础,因此像片控制测量是内业采集的重要依据。
目前采用的测量方法主要有GPS快速静态定位法、RTK实时动态定位测量、光电测距导线等方法。
检查员应认真检查像控点的选刺质量、整饰质量、记录质量、文字说明是否清楚、各项限差是否超限等.3.4.3 碎部测量:为了保证工期,再调绘之前也可进行碎部测量,主要是对隐蔽地物、被遮挡的地物、新增地物及部分高程注记点的测量。
一般情况下,碎部测量和调绘是同时进行的,有时候也和控制测量同时进行。
3.4.4像片调绘:在中小比例尺航测成图中一般使用像片调绘的方法。
航片虽然内容丰富,但毕竟不同于地图,因为在航片上有很多地形图上不必要的影像,如汽车行人等,也不能全部反映出地形图所需要的一切地物,如水井、路碑、各种检修井等,也有一些摄影后因人类经济活动和自然力量所引起的变化,同时在像片上也没有任何注记和说明,所以,为了获取编制地形图必要的资料,就必须进行像片调绘。
所谓像片调绘,就是在航摄像片上,根据构像的规律和特点,识别出地面上相应物体的性质和数量,把像片上所有必要的地物和没有在像片上显示出来的重要的隐蔽地物和地貌元素,在野外调查补测绘出,并且适当地加以综合取舍,用正确的图例符号表示出来,再把这些内容编制在地形图上。
检查员对调绘像片要进行100%的检查,并做好检查记录。
主要检查地图要素综合取舍是否合理,主要地物地貌及主要名称注记有无遗漏,符号运用是否合理,像片整饰是否清晰像片之间、测区外围接边情况等。
3。
4.5二外纸图调绘在大比例尺测图中,外业一般都采用纸图调绘的方法。
首先把采集原图回放在纸图上,然后在野外进行全要素调绘,修补测各类地物,再在计算机上编辑。
对于零星新增、变形、遗漏地物用皮尺勘丈补绘,对于大范围新增地物或者无法用勘丈法补测的地物,则用全站仪野外实测其轮廓坐标,结合勘丈尺寸定位,或用平板补测。
对不存在的或者不必表示的地物打叉.同时在地物密集区可采用水准仪直接在图上测定高程注记点,在地物稀少区,不易判定准确位置,可以采用全站仪直接测定带平面和高程的高程注记点,展点标注在图上即可(地物密集处也可用此法)。
检查员对调绘图纸要全面检查,并填写检查记录。
主要检查地图要素综合取舍是否合理、主要地物有无遗漏、符号运用是否得当、图面整饰是否清晰明白、名称注记是否正确、有没有取图名、作业员有无签名等。
3.5航测内业航测内业工作主要包括空中三角测量、内业数据采集、编辑、数据入库转换、影像图制作等工作.这些工作后面有专门的老师给大家讲解,这里只做一个概略介绍。
3.5.1 影像扫描及空三加密首先要把测区需要的所有影像扫描进计算机中去,后面才能依据外业控制成果进行空三加密。
空三加密也叫空中三角测量,就是在已有外业控制点的基础上,为满足内业测图的需要而进行的室内增测平面和高程控制点的工作。
因为此项工作是在计算机上进行的,故而又称电算加密。
其任务就是为纠正和测图提供定向点或注记点,提供作业时所需要的立体模型.3.5.2内业数据采集加密结束后,采集人员既可在网上调出立体模型进行全要素采集,生成数字化原图.立体测图主要有两种办法,一种全野外像片调绘后测图的方法,一种是根据模型全要素采集后,利用采集原图在外业对照、补测、补调的方法。
采集数据时一定要认真判读,测标要切准,地物不能测变形,否则不但给外业工作带来很多麻烦,也会直接影响最终数据的精度。
检查员要重点检查采集有无遗漏、综合取舍情况及切准精度,并填写检查记录.3.5.2.1先调绘后测图:作业员在采集时,要认真参照调回片上的所有内容,在立体模型下仔细辨认、采集。
原则上是外业定性(附带定位),内业定位。
如果外业确实有误时,经检查员和外业雕绘人员确认后,内业可根据模型影像进行改正,并在调回片背面加以说明,填写日期。
测绘地物地貌元素时要做到无错漏、不变形、不移位.3.5.2.2先采集后调绘:按照模型先进行全要素采集,后面再利用采集原图在野外调绘.这个方法对采集作业员要求较高,应该具备一定的外业工作经验,这样才有把握判准地物、地貌元素,按图式要求直接测绘在图上,对无把握判准的地物地貌元素,只能采集外轮廓由外业处理。
对模型不清的地物无法定位时,在相应位置上标记“A”,由外业补调。
对于隐蔽地物及无影像的地物有外业现场补调。
3.5.3内业编辑内业编辑就是把外业调绘的所有内容按照图式规范准确地表示在地形图数据上,具体的就是按照外业调绘图上所标注的尺寸修改采集原图,把图上所调绘的各种名称注记按规定的字体、大小、排列标注在数据图上,并严格按照设计规定的层、色、线型、线粗表示,以满足用户的数据入库要求。
另外还有控制点的整饰和注记,图廓的各种注记等。
检查员要对编辑数据图全面检查,填写检查记录。
3.5.4影像图制作(DOM)影像图制作就是利用数字高程模型(DEM)对扫描数字化的(或直接以数字方式获取的)航空像片(或航天像片),经数字微分纠正,数字镶嵌,再根据图幅范围剪切成的影像数据。
(数字高程模型就是定义在X、Y域或经纬度域离散点以上高程表达地面起伏形态的数据集)3。
6 野外巡视检查并修改外业巡视检查图面表示与实地景观的一致性,地物地貌元素综合取舍的合理性,各种名称注记的规范性及正确性,图面各种地物的精度是否合乎规范要求,重要地物有无遗漏等。
对于外查中发现的问题要求作业员一一修改,并填写检查记录。
如果问题太多则要求作业员重新全面检查改错,直至产品合格。
3。
7 质检科检查(院级检查)质检科一般是采用抽查(15%)的方式检查成品图的质量情况。
检查中发现有不符合图式规范及技术设计要求的产品时,应及时提出处理意见,让相关人员进行改正。
当问题较多或者性质严重时,将产品直接退回作业单位(人员)要求返工或返修,处理完毕后再进行检查,直至合格。
检查过程中除了填写检查记录外,还要编写最终产品的检查报告。
3.8 提交最终成果产品合格后即可按技术要求对最终产品进行数据转换入库,转换完毕后刻录数据光盘,提交用户进行检查验收,再根据用户在验收中提出的问题及处理意见对数据进行修改,完毕后再提交最终的合格产品。
以上就是航空摄影测量的整个流程,在作业过程中对于各个工序发现的问题,要及时总结,开会学习,问题反馈给上工序,以便上工序尽快改进,并进行必要的总结,这样才能不断进步,真正地提高作业质量及工作效率。
西安煤航信息产业有限公司测绘分公司余杨文于2007年7月航空摄影测量成图方案一、空摄影测量概述航空摄影测量:是根据在航空飞行器上拍摄的地面像片,获取地面信息,测绘地形图。
主要用于测绘1:1000~1:100000各类比例尺的地形图。
航摄像片是航空摄影测量的基本资料,是用画幅式航摄机,按照严格的航摄要求摄得的。
原理:单张像片测图的基本原理是中心投影的透视变换,而摄影过程的几何反转则是立体测图的基本原理。
广义来说,前一情况的基本原理也是摄影过程的几何反转。
20世纪30年代以后,摄影过程的几何反转都是应用各种结构复杂的光学机械的精密仪器来实现的。
50年代,开始应用数学解析的方式来实现。
图1就是用光学投影方法实现摄影几何反转的示意图理论航空摄影测量的主题,是将地面的中心投影(航摄像片)变换为正射投影(地形图)。
这一问题可以采取许多途径来解决.如图解法、模拟法和解析法等。
在每一种方法中还可细分出许多具体方法,而每种具体方法又有其特有的理论。
其中有些概念和理论是基础性的,带有某些共性,如像片的内方位元素和外方位元素,像点同地面点的坐标关系式,共线条件方程,像对的相对定向,模型的绝对定向和立体观测原理等。
像片的内方位元素和外方位元素内方位元素用以确定摄影物镜后节点(像方)同像片间的相关位置.利用它可以恢复摄影时的摄影光线束.内方位元素系指摄影机主距 f和摄影机物镜后节点在像平面的正投影位于框标坐标系中的坐标值(x0,у0).这些数值通过对航摄机鉴定得出,故内方位元素总是已知的.确定摄影光线束在摄影时的空间位置的数据,叫做像片或摄影的外方位元素。