第6章 鲁棒控制系统的计算机辅助设计与仿真
控制工程基础(第六章)

contents
目录
• 引言 • 控制工程基础概述 • 控制系统分析和设计 • 控制系统的稳定性分析 • 控制系统的鲁棒性分析 • 控制系统的仿真与实现
01 引言
主题概述
01
控制工程基础是自动化和控制系统领域的重要基础课程,主要 涉及控制系统的基本概念、原理、分析和设计方法。
鲁棒性条件
满足一定条件的系统才能具有较好的 鲁棒性,如系统的稳定性和性能指标 等。
控制系统鲁棒性的改善方法
设计方法
通过优化控制器参数或设计新的控制器来提 高系统的鲁棒性。
反馈策略
采用负反馈、前馈等方法来减小外部输入和 内部干扰对系统的影响。
状态估计
利用状态估计技术对系统状态进行估计,以 减小状态变化对系统的影响。
测试实验设计
设计测试实验,包括不同工况下的系统性能测试。
3
性能评估方法
采用合适的性能评估方法,如根轨迹法、频率响 应法等,对控制系统性能进行分析和评估。
THANKS FOR WATCHING
感谢您的观看
线性系统设计
自适应控制设计
通过线性变换和线性化方法,将非线 性系统转化为线性系统进行设计。
根据系统参数和状态的变化,自适应 地调整控制器参数,以适应系统变化。
鲁棒控制设计
考虑系统的不确定性和干扰,设计鲁 棒控制器,提高系统的稳定性和性能。
控制系统优化设计
最优控制设计
通过优化方法,寻找最优的控制策略,使得系统 性能达到最优。
02
本章将介绍控制工程的基本概念、发展历程、应用领域以及与
其他学科的关系。
通过学习本章,学生将建立起对控制工程的基本认识,为后续
03
鲁棒控制理论
• LQG控制系统具有一定的相对稳定性,但LQG控制系统 甚至LQ最优调节器对被控对象的模型摄动(模型误差) 的鲁棒稳定性在某些场合很差。
– 如果被控对象不是由一个确定的模型来描述的,而仅 知道其模型属于某个已知的模型集合;
– 1982年,Doyle针对H∞性能指标发展了“结构奇异值”来检验 鲁棒性,极大程度地促进了以∞范数为性能指标的控制理论的 发展
– Youla等人提出的控制器参数化,使Zames的H∞性能指标以及 Doyle的结构奇异值理论揭开了反馈控制理论的新篇章
– H∞控制理论蓬勃发展:从频域到时域、定常系统到时变系统、 线性系统到非线性系统、连续系统到离散系统、确定性系统到 不确定系统、无时滞系统到时滞系统、单目标控制到多目标控 制……
鲁棒控制理论
第六章 H∞标准控制
前言
• 本章在标准框架下讨论H∞控制问题的求解。 • H∞控制理论可分为频域方法和时域方法。本章开始介
绍时域方法。 • 时域状态空间方法包括Riccati方法和LMI (Linear
Matrix Inequality,线性矩阵不等式)方法。 • 本章将重点介绍理论上成熟的Riccati方法(包括状态
– 外部信号(包括干扰信号、传感器噪声和指令信号等) 不是具有已知特性(如统计特性或能量谱)的信号, 也仅知道其属于某个已知的信号集合。
• 在以上两种情况下,控制系统的设计如果采用传统的H2 性能指标,在某些场合不能满足实际的需要。
例
考虑SISO被控对象,其传递函数为P0
s
s
2s
1
3
机械系统的鲁棒控制与优化设计

机械系统的鲁棒控制与优化设计随着科技的不断进步,机械系统在人们的生活中起到越来越重要的作用。
而要保证机械系统的高效运行,鲁棒控制与优化设计是至关重要的环节。
本文将探讨机械系统的鲁棒控制与优化设计方法,并从实际应用的角度分析其价值和意义。
一、什么是鲁棒控制与优化设计?鲁棒控制是一种可以在系统受到外界扰动和内部变化的情况下仍能保持稳定性和性能的控制方法。
而优化设计是通过对机械系统进行模型建立和分析,以求得最优参数或结构的设计方法。
鲁棒控制与优化设计是将控制和设计相结合的一种方法,旨在提高机械系统的稳定性、精度和性能。
它可以通过校正系统参数和结构,使机械系统能够适应不同条件和环境下的工作要求,提高系统的可靠性和效率。
二、机械系统的鲁棒控制方法1. PID控制器PID控制器是机械系统控制中最常用的方法之一,它可以根据系统的反馈信号来调整控制量。
PID控制器具有简单、稳定性好等优点,但其对于不确定性和外界干扰的鲁棒性较差。
为了解决PID控制器的鲁棒性问题,可以采用模糊PID控制器或自适应PID控制器等方法。
模糊PID控制器可以通过模糊逻辑来处理系统的不确定性,从而提高系统的鲁棒性。
自适应PID控制器则可以根据系统的变化来自动调整PID参数,以适应系统的不确定性和外界扰动。
2. 预测控制方法预测控制是一种基于模型的控制方法,它通过对系统的建模和预测,来确定最优控制量。
预测控制方法可以提高机械系统的控制精度和响应速度,同时也具有较好的鲁棒性。
为了提高预测控制方法的效果,可以采用模型预测控制、自适应预测控制等方法。
模型预测控制通过建立系统的数学模型,来预测系统未来的状态和输出。
自适应预测控制则可以根据实际的系统状态来自适应地调整预测模型和控制参数,以提高系统的鲁棒性和控制性能。
三、机械系统的优化设计方法1. 数学优化方法数学优化方法是一种通过建立优化目标函数和约束条件,来求解最优解的方法。
在机械系统的优化设计中,可以采用数学优化方法来确定最优的系统参数或结构。
鲁棒控制与故障诊断 第六章

E
2 2
0
e dt W e S oW d
2
2 2
Include the control signal u in the cost function:
E
e
2 2
2
~ u
2 2
W e S oW
2
d d 2
W u KS o W
Robustness problem???? H Performance: under worst possible case sup e 2 W e S oW d
L stable and nonminimum phase with RHP zeros: z1,…, zk:
s z1 s z 2 s z k L( s ) Lmp ( s ) s z1 s z 2 s zk
1
L ( j 0 )
d ln L dv
Sensor noise rejection and robust stability (high frequency):
( T0 ) ( PK ( I PK ) 1 ) ( 1)
Note that
( S 0 ) 1 ( PK ) 1 ( S i ) 1 ( KP ) 1 (T0 ) 1 ( PK ) 1
~ d
2
1
restrictions on the control energy or control bandwidth: ~ W KS W sup u
~ d
Combined cost:
2
1
控制系统MATLAB仿真与应用第6章

机械工业出版社 CHINA MACHINE PRESS
讲课内容
第 1 章 概述 第 2 章 MATLAB 程序设计基础 第 3 章 MATLAB 图形设计 第 4 章 控制系统数学模型及其MATLAB描ቤተ መጻሕፍቲ ባይዱ 第 5 章 控制系统计算机辅助分析 第 6 章 控制系统计算机辅助设计 第 7 章 控制系统Simulink仿真 第 8 章 控制系统MATLAB仿真实例
机械工业出版社 CHINA MACHINE PRESS
6.3 基于MATLAB的频率特性设计
机械工业出版社 CHINA MACHINE PRESS
6.4 基于MATLAB的PID控制器设计
机械工业出版社 CHINA MACHINE PRESS
6.4 基于MATLAB的PID控制器设计
机械工业出版社 CHINA MACHINE PRESS
function[sysc,Kp,Ti,Td]=pidindex(sys,
Ess,Wc,PM,type)
%sys---------------------%the original
system
%Ess---------------------%Desired steady
error
%Wc----------------------%a gived gain
6.2 基于MATLAB的根轨迹设计
poles = -2.7667 -1.4299 -0.4017 + 0.7148i -0.4017 - 0.7148i
机械工业出版社 CHINA MACHINE PRESS
6.2 基于MATLAB的根轨迹设计
6.2.2 增益设计法
为了检验所设计系统是否满足期望性能指标,编写MATLAB程序和运行结果 如下:
《鲁棒控制与鲁棒控制器设计》
《鲁棒控制与鲁棒控制器设计》鲁棒控制是指在系统存在不确定性和外部干扰的情况下仍然能够保证系统稳定性和性能的控制方法。
在现实生活中,控制系统往往会受到各种不确定因素的影响,如参数变化、外部扰动、测量误差等。
鲁棒控制的目标就是在这些不确定性的情况下,保持系统的稳定性和性能。
鲁棒控制器设计是实现鲁棒控制的关键环节。
其设计目标是要求控制器能够在不确定性和外部干扰的情况下仍然能够保持系统的稳定性和性能。
鲁棒控制器设计的方法有很多种,下面介绍两种常见的设计方法:1.H∞鲁棒控制H∞鲁棒控制是一种基于频域的鲁棒控制方法。
它通过最小化系统输入输出的γ范数来设计控制器,使系统对不确定性和外部干扰具有鲁棒稳定性和鲁棒性能。
H∞鲁棒控制的设计流程一般包括以下几个步骤:首先,建立系统模型,获取系统的传递函数;然后,根据系统模型设计一个传递函数为V的鲁棒性能权值V;接着,利用V来计算问题的解;最后,根据问题的解设计出最优的鲁棒控制器。
2.μ合成鲁棒控制μ合成鲁棒控制是一种基于频域分析的鲁棒控制方法。
它通过合成满足一定性能要求的不确定性权值函数,来设计鲁棒控制器。
μ合成鲁棒控制的基本思想是先构造正向控制律,使得系统的输出能够满足给定性能要求;然后,构造反向控制律,抵消系统的不确定性和外界干扰,使得系统具有鲁棒稳定性。
以上是两种常见的鲁棒控制器设计方法,它们都能够有效地确保系统在不确定性和外部干扰的情况下仍能保持稳定性和性能。
在实际应用中,根据具体系统的特点和需求,可以选择合适的鲁棒控制器设计方法来解决问题。
总结起来,鲁棒控制器设计是鲁棒控制的关键环节之一、通过合适的设计方法,能够使系统在面对不确定性和外部干扰的情况下仍然能够保持稳定性和性能。
在实际应用中,我们应根据具体情况选择合适的鲁棒控制器设计方法,以满足系统的要求。
自动控制系统计算机仿真第6章
x2 y
x3
0 x1 0 x 1 0 1.176 0 2 u 0 0 1 x3 0 0 18.293 0 x4 1.667
x1 y x1 1 0 0 0 x2 θ x 0 0 1 0 x 3 3 x4
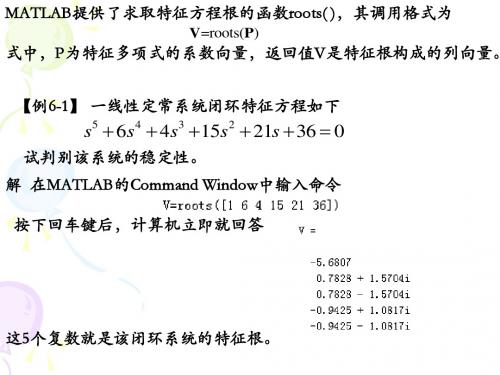
这5个复数就是该闭环系统的特征根。
MATLAB还提供一个可以直接求取矩阵特征值的函数eig( ),其调用 格式为 D=eig(A) 其中D为矩阵A的特征值向量。 调用该函数时,也可以给出两个返回值: V,D =eig(A) 其中V是由与特征值相对应的特征向量构成的变换矩阵。 【例6-2】某线性控制系统的状态方程为
计算机返回 :
可见,开环系统稳定。再输入命令:
计算机绘制出奈氏图 :
由于奈氏曲线不包围 (-1,j0)点,因此, 闭环系统为稳定。
输入命令 计算机绘制出Bode图,并且计算出幅值裕度和相角裕度
显然,系统稳定
6.4 根轨迹分析方法
控制系统的根轨迹分析方法就是利用系统的某个参数(通常是开环 增益)从0变化到无穷大时,闭环系统特征根所留下的轨迹(即根 轨迹)来分析系统性能以及参数变化对系统性能的影响。
6.4.2 绘制根轨迹的常用函数及其应用实例
在MATLAB编程语言中,有绘制根轨迹的命令rlocus, 其基本格式为 rlocus(sys) 和 rlocus(sys, T) 或者 rlocus(num, den, T) 和 rlocus(num, den, T) 执行该命令后,根轨迹图自动生成。如果给定参数T,则绘制当T从 0变化到无穷大时的广义根轨迹。 【例6-12】已知系统开环传递函数如下,绘制系统根轨迹,并求出 闭环系统临界稳定时的根轨迹增益值。