神经网络实验七
TensorFlow2深度学习实战-教案全套 第1-7章

TensorFlow2深度学习实战-教案第1章深度学习概述教案课程名称:TensorFlow 2 深度学习实战课程类别:必修适用专业:人工智能类相关专业总学时:64学时(其中理论36学时,实验28学时)总学分:4.0学分本章学时:2学时一、材料清单(1)《TensorFlow 2 深度学习实战》教材。
(2)配套PPT。
(3)引导性提问。
(4)探究性问题。
(5)拓展性问题。
二、教学目标与基本要求1.教学目标本章主要介绍深度学习的基本定义以及其应用领域,包括物体检测、视觉定位、物体测量、物体分拣、图像分割、图像的生成等应用领域;然后分别介绍深度学习与计算机视觉、自然语言处理、语言识别、机器学习和人工智能间的关系;最后介绍常用的深度学习基本框架以及TensorFlow的生态和特征。
2.素质目标(1)培养学生自主学习意识,将理论联系实际并落到实处。
(2)培养学生尊重知识产权,合理的运用他人劳动成果。
(3)培养学生的探索精神,不断主动学习新的知识内容。
3.基本要求(1)了解深度学习的基本定义。
(2)了解深度学习的常见应用场景。
(3)了解常见的深度学习应用技术。
(4)了解常见的深度学习框架。
(5)熟悉深度学习框架TensorFlow的生态。
(6)熟悉深度学习框架TensorFlow的特性。
(7)熟悉深度学习框架TensorFlow的改进过程。
三、问题1.引导性提问引导性提问需要教师根据教材内容和学生实际水平,提出问题,启发引导学生去解决问题,提问,从而达到理解、掌握知识,发展各种能力和提高思想觉悟的目的。
(1)深度学习能够做什么?(2)现实生活中存在哪些地方应用了深度学习技术?(3)该如何进行数据分析?(4)TenserFlow框架有哪些优势?2.探究性问题探究性问题需要教师深入钻研教材的基础上精心设计,提问的角度或者在引导性提问的基础上,从重点、难点问题切入,进行插入式提问。
或者是对引导式提问中尚未涉及但在课文中又是重要的问题加以设问。
深度学习的实验报告(3篇)
第1篇一、实验背景随着计算机技术的飞速发展,人工智能领域取得了显著的成果。
深度学习作为人工智能的一个重要分支,在图像识别、语音识别、自然语言处理等方面取得了突破性进展。
手写数字识别作为计算机视觉领域的一个重要任务,具有广泛的应用前景。
本实验旨在利用深度学习技术实现手写数字识别,提高识别准确率。
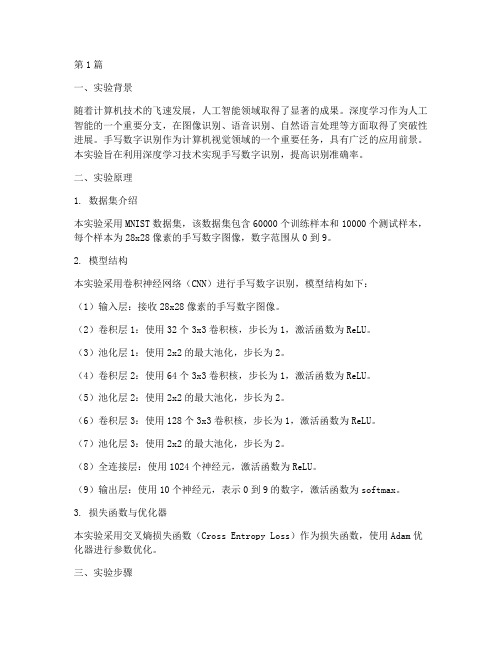
二、实验原理1. 数据集介绍本实验采用MNIST数据集,该数据集包含60000个训练样本和10000个测试样本,每个样本为28x28像素的手写数字图像,数字范围从0到9。
2. 模型结构本实验采用卷积神经网络(CNN)进行手写数字识别,模型结构如下:(1)输入层:接收28x28像素的手写数字图像。
(2)卷积层1:使用32个3x3卷积核,步长为1,激活函数为ReLU。
(3)池化层1:使用2x2的最大池化,步长为2。
(4)卷积层2:使用64个3x3卷积核,步长为1,激活函数为ReLU。
(5)池化层2:使用2x2的最大池化,步长为2。
(6)卷积层3:使用128个3x3卷积核,步长为1,激活函数为ReLU。
(7)池化层3:使用2x2的最大池化,步长为2。
(8)全连接层:使用1024个神经元,激活函数为ReLU。
(9)输出层:使用10个神经元,表示0到9的数字,激活函数为softmax。
3. 损失函数与优化器本实验采用交叉熵损失函数(Cross Entropy Loss)作为损失函数,使用Adam优化器进行参数优化。
三、实验步骤1. 数据预处理(1)将MNIST数据集分为训练集和测试集。
(2)将图像数据归一化到[0,1]区间。
2. 模型训练(1)使用训练集对模型进行训练。
(2)使用测试集评估模型性能。
3. 模型优化(1)调整学习率、批大小等超参数。
(2)优化模型结构,提高识别准确率。
四、实验结果与分析1. 模型性能评估(1)准确率:模型在测试集上的准确率为98.5%。
(2)召回率:模型在测试集上的召回率为98.2%。
(3)F1值:模型在测试集上的F1值为98.4%。
(完整word版)基于BP神经网络的自整定PID控制仿真
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
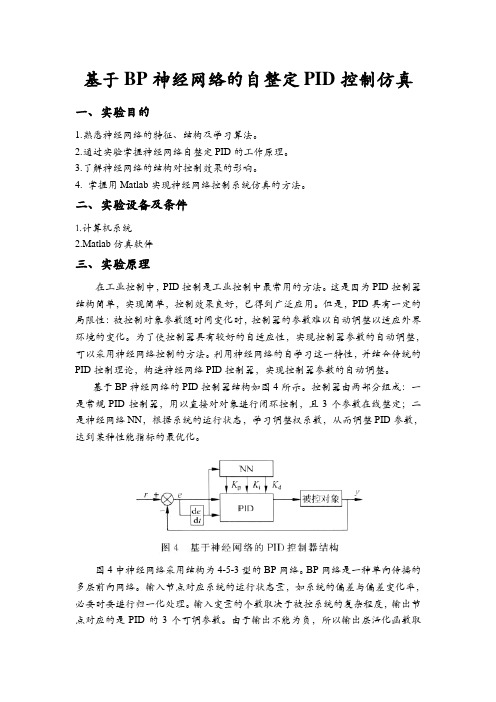
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
单刚矩阵计算用神经网络结构的实验确定

3 S h o f M eh nc l g ne ig ,No t e s Unv ,S e y n 1 0 6 h n ) . c o l c a ia o En iern rh a t i . h n a g 1 0 0 ,C ia
孙 道 恒 黄 洪 钟 。 胡 俏 徐 灏。
( .厦 I 学 机 电 工 程 系 , 建 厦 I 3 1 0 ; 1 ]大 福 ] 6 0 5 2 .大 连 理 工 大 学 机 械 工 程 学 院 , 宁 大 连 1 6 2 ; 辽 1 0 4 3 .东北 大 学 机 械 工 程 学 院 , 宁 沈 阳 辽 10 0 ) 1 0 6
维普资讯
20 0 2年 第 l 8卷 幕 4期
20 02.V o1 8 .1 N o. 4
I r 机 十 l 乜 H : 筻
El c r - M e ha c l Eng ne i e l o- c ni a i er ng
单 刚 矩 阵 计 算 用 神 经 网 络 结 构 的 实 验 确 定
ve ge e s e r nc pe d
基 于 串 行 计 算 机 , 虑 塑 性 、 伤 、 劳 、 变 等 考 损 疲 蠕 多种 力学 行 为 的 全 耦 合 求 解 问题 , 算过 程 复 杂 , 计 求 解 时 间 长 , 法 实 现 实 时 化 ] 神 经 网 络 是 一 复 杂 无 。 的非 线性动 力系统 , 有高度 的并行 计算 能 力。 具 19 9 3年 , 腊 雅 典 国 家 科 学 院 学 者 P S Th o ai 希 . . e c rs 等 人 在 分 析 了 Ho f l 络 的 基 础 上 , 次将 其 应 p i d网 e 首 用 于 断 裂 力学 的 计 算 问 题 … 。作 者 在 此 基 础 上 , 根 据 力学 中的 最 小 势 能 原 理 , 出 可 以把 固 体 力学 的 提 有限元计算 问题统一 描 述 为约 束 非线性 优化 问题 ,
汽车前悬架隔振性能的实验分析与神经网络辨识

或阻止振 动 由环境 向物体 的传递谓 之被 动隔振.
对 于二 阶线 性 欠 阻 尼 隔振 系 统 ,其 幅频 特 性 ,即 振 动传 递率 1 日∽ I = 1+s(/o2  ̄ ff) 2
车悬 架 的隔振 性能 .
2 实验方 案及其结 果分析
维普资讯
桂
林
工
学
院
学
报
20 07钲
能导 致其疲 劳程 度增 大 ;2 为 了提 高 乘员 所 能 承 )
表 1 改 变 B 2 悬 架 钢 板 弹 簧 数 量 时 的 振 动 参数 J1 2前
T be 1 V b ain p rmees s e s r g o J 1 a l ir t a a tr t l p i fB 2 2 o e n
中图分类 号 :U 6 . 439 文献标 志码 :A
振 动是 生 产 和 生 活 中常 见 的现 象 ,振 动 给 人 式 中 为 频 率 变 量 为 系 统 的 固 有 频 率 , = f o
类 和机器 带 来 的危 害 不 言 而 喻. 在 诸 多 的减 振 措 v f / 7, "  ̄ 2r其中 m为被隔振 物体的质量 , 为隔振 f k k 施 中 ,汽车悬 架 是 隔 振 系 统 中 的 重 要 组 成 部 分 , 结 构 的刚度 ; 为阻 尼 比 , =c( m. , 中 c /2 j 其 } ) 为 其 隔振性 能 直 接 影 响 着 整 车 的平 顺 性 、舒 适性 和 隔振 结构 的粘性 阻尼 系数 . 动传 递 率 1 振 日∽ I的 操 纵稳 定性 . 变 化 曲线如 图 1所 示 , 中 阻 尼 比 I小 于 阻尼 比 其 由于神 经 网 络 能 够 充 分 逼 近 任 意 复 杂 的非 线 Ⅱ 可见振动传递率日随激励力频率/ . 和阻尼比 的 性 关系 , 习 和 适 应 严 重 不 确 定 性 系 统 的 动 态 特 学 变 化 而变化 , 以下规 律 : 有 性, 具有 高度并 行性 、 棒 性 和容 错 性 … , 文通 过 鲁 本 实验 分 析 , 尝试 利 用神 经 网络 对 汽 车前 悬 架振 动 的 参数 进行 辨识 , 而 比较 同一 车 型在 不 同刚度 情 况 从 下 以及不 同车型之 间 的隔 振效 能 , 而 探求 更 有 效 进 的汽 车 隔振 方 法 , 以改善 汽 车的乘 坐舒适 性 .
基于Matlab和VC++的神经网络仿真实验设计

Ab ta t Sm u ain e p rm e t s o e o h fe tv e n o u a t r ta h n . I ep sr c : i lt x e i n i n f t e ef cie m a s f r Ne r lNe wo k e c ig o t h ls su e t b o b w h t t e a e la n d Bu h i u ain e p r e t t a lb o l a e s m e t d n sa s r a h y h v e r e . t t e sm lt x e i n s wi M ta n y h v o o m h s o to ig ih ma et esm ua ine p rme t o t iin si.Thsp p rp e e t e inm e h h rc m n swh c k h i lt x e i n sn ti uto itc o n i a e r s n sad sg t —
YAO i M n ,ZHAO i M n ,XI NG Li
(. olg fAuo ainEn ier g,Na jn 1 C l eo e tm t o gnei n n igUnv ri fAeo a t s n ies yo t rn ui dAsrn uis ca toa t ,Na jn c n ig,2 0 1 ,hn ; 1 0 6C ia
维普资讯
第2卷 第3 9 期
20 0 7年 6月
BP神经网络逼近非线性函数

应用BP神经网络逼近非线性函一、实验要求1、逼近的非线性函数选取为y=sin(x1)+cos(x2),其中有两个自变量即x1,x2,一个因变量即y。
2、逼近误差<5%,即:应用测试数据对网络进行测试时,神经网络的输出与期望值的最大误差的绝对值小于期望值的5%。
3、学习方法为经典的BP算法或改进形式的BP算法,鼓励采用改进形式的BP算法。
4、不允许采用matlab中现有的关于神经网络建立、学习、仿真的任何函数及命令。
二、实验基本原理2.1 神经网络概述BP神经网络是一种多层前馈神经网络,该网络的主要特点是信号前向传播,误差反向传播。
在前向传递中,输入信号从输入层经隐含层逐层处理,直至输出层。
每一层的神经元状态只影响下一层神经元状态。
如果输出层得不到期望输出,则转入反向传播,根据预判误差调整网络权值和阈值,从而使BP神经网络预测输出不断逼近期望输出。
BP神经网络的拓扑结构如图所示。
2.2 BP神经网络训练步骤BP神经网络预测前首先要训练网络,通过训练使网络具有联想记忆和预测能力。
BP神经网络的训练过程包括以下几个步骤。
步骤1:网络初始化。
根据系统输入输出序列(X,Y)确定网络输入层节点数n、隐含层节点数l、输出层节点数m,初始化输入层、隐含层和输出层神经元之间的连接权值ωij,ωjk,初始化隐含层阈值a,输出层阈值b,给定学习速率和神经元激励函数。
步骤2:隐含层输出计算。
根据输入变量X,输入层和隐含层间连接权值ωij以及隐含层阈值a,计算隐含层输出H。
j 1(a )nj ij i i H f x ω==-∑ j=1,2,…,l式中,l 为隐含层节点数,f 为隐含层激励函数,该函数有多种形式,一般选取为1(x)1xf e-=+步骤3:输出层输出计算。
根据隐含层输出H ,连接权值ωjk 和阈值b ,计算BP 神经网络预测输出O 。
1lk j jk k j O H b ω==-∑ k=1,2,…,m步骤4:误差计算。
基于循环神经网络的气温时间序列预测

基于循环神经网络的气温时间序列预测循环神经网络(Recurrent Neural Network,RNN)是一种强大的机器学习模型,被广泛应用于时间序列数据的预测和建模任务。
气温是一种常见的时间序列数据,其预测对于气象学、农业、能源等领域具有重要意义。
本文将探讨基于循环神经网络的气温时间序列预测方法,并对其应用进行深入研究和分析。
第一部分:引言气温是指大气中空气分子热运动引起的物理现象,具有季节性、周期性和随机性等特点。
准确地预测气温对于农业生产、能源调度和天气灾害防范等方面具有重要意义。
传统的基于统计方法的气温预测模型往往无法捕捉到时间序列中隐含的非线性关系以及长期依赖关系。
而基于循环神经网络的方法能够有效地处理这些问题,并取得了许多优秀成果。
第二部分:循环神经网络简介循环神经网络是一种具有记忆能力的人工神经网络,其特点在于能够处理序列数据,并通过将当前输入与之前的状态相结合来预测下一个状态。
RNN的基本结构包括输入层、隐藏层和输出层。
隐藏层中的神经元通过时间步的迭代来传递信息,从而实现对时间序列数据的建模和预测。
第三部分:循环神经网络在气温预测中的应用循环神经网络在气温预测中具有广泛应用。
首先,RNN能够捕捉到气温数据中的长期依赖关系,从而能够更准确地预测未来的气温趋势。
其次,RNN能够处理不定长序列数据,适用于各种时间间隔下的气温预测任务。
此外,RNN还可以处理多变量时间序列数据,在考虑其他相关因素时提高了气温预测模型的准确性。
第四部分:基于循环神经网络的气温时间序列建模方法基于循环神经网络进行气温时间序列建模可以采用多种方法和技术。
其中包括使用传统RNN、长短期记忆网络(Long Short-Term Memory,LSTM)和门控循环单元(Gated Recurrent Unit,GRU)等不同类型的RNN结构。
此外,在输入特征选择、网络结构设计和模型训练等方面也有许多技巧和策略可供选择。