精度设计(第5章)
第五章 冒口设计
5.补贴的应用
为了实现顺序性凝固和增强补贴效果,铸造工艺人员 在靠近冒口的铸件壁厚上补加的倾斜的金属块称为补贴 (增肉)。冒口附近有热节或铸 件尺寸超过冒口补贴距离时, 利用补贴可造成向冒口的补 贴通道,实现补缩。应用补 贴可消除铸件下部热节处的 缩孔,还可延长补缩距离, 减少冒口数目。
补贴分类:
第二节 铸钢件冒口的设计与计算
铸钢件冒口属于通用冒口,其计算原理适用于实行顺序 凝固的一切合金铸件。通用冒口的计算方法很多,现仅介绍 几种常用的冒口计算方法。
一.模数法
1.模数的定义
在铸件材质、铸型性质和浇注条件确定之后,铸件的凝 固时间主要决定于铸件的结构形状和尺寸。而千差万别的铸 件形体,对凝固时间的影响主要表现在铸件体积和表面积的 关系上。铸件体积愈大,则金属液愈多,它所包含的热量也 愈多,凝固时间就长。铸件体积相等,液体金属的重量及所 含的热量就相等,如果铸件的结构不一样,则散热表面积就 不相等。显然,表面积愈大,散热就愈快,凝固时间愈短; 反之,表面积愈小,凝固时间就愈长。
第五章
冒口设计
第一节 冒口的种类及补缩原理
冒口是铸型内用以储存金属液的空腔,在铸件的 形成时补给金属,有防止缩孔、缩松、排气和集渣的 作用.习惯上把冒口所铸成的金属实体也称为冒口。
一、冒口的种类
顶冒口 依位置分 普通冒口 侧冒口 明冒口 暗冒口
依顶部覆盖分
通用冒口 (传统)
依加压方式分
特种冒口
冒口 依加热方式分 易割冒口
r
式中: Mr、Mc—分别为冒口模数和铸件模数; Kr、Kc—冒口、铸件的凝固系数。 对于普通冒口,Kr=Kc,因而上式可写成Mr= f Mc 式中 f —冒口的安全系数,f≥1。
在冒口补给铸件的过程中,冒口中的金属逐渐减少,顶面形成 缩孔使散热表面积增大,因而冒口模数不断减小;铸件模数由 于得到炽热的金属液的补充,模数相对地有所增大。根据试 验,冒口模数相对减小值约为原始模数的17%,一般取安全 系数f=1.2。安全系数过大,将使冒口尺寸增大,浪费金属, 加重铸件热裂和偏析倾向。 对于碳钢、低合金钢铸件,其冒口、冒口颈和铸件的模数 关系应符合下列关系。 对于侧冒口 Mc:Mn:Mr=1:1.1:1.2 (3-5-3) 内浇道通过冒口 Mc:Mn:Mr=1:(1~1.03):1.2 (3-5-4) 对于顶冒口 Mr=(1.2~1)Mc (3-5-5) Mn---为冒口颈的模数。
第5章—可靠性设计2

第三节
可靠性设计的原理
应力—强度分布的平面干涉模型
这个观点在常规设计的安全系数法中是不明确的。
因为根据安全系数进行的设计不存在失效的可能性。
因此,可靠性设计比常规设计要客观的多,因而应用也要广泛的多。
干涉区放大图
可靠度的确定方法
从平面干涉模型可以看出,要确定可靠度或失效概率必须研究一个随机变量超过另一个随机变量的概率。
假设失效控制应力为σ1(任意的),那么当强度δ大于时σ1就不会发生破坏,可靠度就是强度大于失效控制应力的概率,即
]
0)[()(11>−=>=σδσδp p R
现代设计方法毛志伟
系统的可靠性设计
串联系统的可靠度计算
要有一个元件失效该系统就失效,那么这个系统就
是由齿轮、轴、键、轴承和箱体等组成,从功能关系上看,他们中任何一部分失效
并联系统逻
辑图
从而维持系统的正常运行。
储备系统逻辑图
在机械系统中,通常只用三中取二
个,因此有四种成功的工作情况:
2/3表决系统逻辑图根据概率乘法定理和加法定理,2/3系统的可靠度为。
机械制造技术基础第5章-1

线,安装时首先按找正线找正工件位臵,夹紧工件。
特点:
•精度低;(0.1mm左右) •效率低; •多用于形状复杂、尺寸偏差大
找正线 加工线
的铸、锻件毛坯的粗加工;
•适于单件小批量生产; •不需其它专门设备,通用性好;
flash
毛坯孔
3.利用夹具定位
来实现定位。
联接
原理:通过工件上定位基准和夹具上定位元件接触或配合 特点:
5.2.3 典型的定位方式及定位元件的选择
(2)可调支承
是顶端位置可在一定高度范围内调整的支承。 多用于未加工平面的定位,以调节和补偿各批 毛坯尺寸的误差。一般每批毛坯调整一次。
返回第39页
5.2.3 典型的定位方式及定位元件的选择
(3)自位支承
支承本身的位置在定位过程中,能自动适应工件定位基准面位置变化 的一类支承。 自位支承能增加与工件定位面的接触点数目(但只限制一个自由 度) ,使单位面积压力减小,故多用于刚度不足的毛坯表面或不连续的 平面的定位。
3.过定位与欠定位
欠定位: 按工序的加工要求, 工件应该限制的自由度而未予限 制的定位, 称为欠定位。 绝对不允许出现 过定位: 工件的同一自由度被两个或两个以上的支承点重复 限制的定位, 称为过定位。
过定位一般不允许, 但是在精加工中,为提高定位稳定性和结构刚度,简 化夹具 可用过定位 ;粗加工不允许。
5.2.3 典型的定位方式及定位元件的选择
定位元件的设计应满足下列要求:
⑴要有与工件相适应的精度; ⑵要有足够的刚度,不允许受力后发生变形; ⑶要有耐磨性,以便在使用中保持精度。一般多采用 低碳钢渗碳淬火或中碳钢淬火,硬度为58∼62HRC
5.2.3 典型的定位方式及定位元件的选择
机械设计第5-7章习题解答汇总
第5章 带传动与链传动5-1 带传动的弹性滑动是怎样产生的?能否防止?对传动有何影响?它与打滑有何不同?答:带传动的弹性滑动是由于带的弹性和拉力差而引起的带和带轮面间的局部的、微小的相对滑动,这是摩擦型带传动正常工作时的固有特性,是不可防止的。
弹性滑动导致传动效率降低、带磨损、传动比不准确。
打滑是由过载引起的带在带轮上的全面滑动,使传动失效。
打滑为非正常的工作状态,是必须防止也是可以防止的。
5-2带传动的中心距为什么要限制在一定的范围?答:带传动的中心距之所以要限制在一定的范围,是因为:1〕假设中心距过小,虽结构紧凑,但小带轮的包角太小,导致摩擦力和传动能力降低;2〕中心距过小,使带的长度过短,带的工作频率增加,降低带的疲劳强度和工作寿命;3〕中心距假设过大,不仅结构不紧凑,且皮带松边下垂,高速传动时易引起带的颤抖。
5-3.多根V 带传动时,假设发现一根已坏,应如何处置?答:多根V 带传动时,即使只发现一根已坏,也应该同时更换新的V 带,不可新旧混用。
5-4 已知一V 带传动,小带轮直径d 1d =160mm,大带轮直径d 2d =400mm ,小带轮转速n 1=960min r ,滑动率2=ε00,试求由于弹性滑动引起的大带轮的转速损失。
解: 假设无弹性滑动,大带轮的理想转速n 2应为:1122n d 960160n 384(r /min)d 400⨯=== 所以,由弹性滑动引起的大带轮的转速损失为:2n =3840.02=7.68(r /min)ε⨯5-5 为什么链传动具有运动不平稳性?答:由于链传动的多边形效应,使其瞬时速度和瞬时传动比周期性变化,从而引起动载荷,所以链传动具有运动不平稳性。
5-6 为什么链条节数常取偶数,而链轮齿数取为奇数?答: 因为假设链节数为奇数,则需要采用过渡链节,当链条受拉时,过渡链节的弯链板承受附加的弯矩作用,强度降低,所以链节数常取为偶数。
正因为链节数常为偶数,为使磨损均匀,链轮齿数一般取为奇数。
第5章 简单控制系统的设计及参数调整方法

第五章 简单控制系统的设计
2. 控制参数的选择(重要选择)
依据过程特性对控制质量的影响,不难归纳选择控制参数的 一般原则:
K P越大越好 , TP 适当小一些 ; (a)
(b) P 越小越好 , P
/ TP 0.3
(c)K f 尽可能小, T f 尽可能大,尽可能多,尽可能将大的纯滞 后置于干扰通道,干扰进入系统的位置尽可能远离被控参数。
由此可见,时间常数越错开,K 0 越大,对系统稳定性越有 利,在保持一定稳定性的条件下,对保持质量越有利。
小结
控制通道的K P 越大越好,TP适当减小, P 越小越好,多个 时间常数的大小越错开越好。
第五章 简单控制系统的设计
(三)控制方案的确定
1、系统被控参数选取的一般原则 (a)应选取对产品的产量、质量、安全生产、经济运行、环 境保护有决定性作用、又可直接进行测量的工艺参数作为被 控参数(直接参数); (b)选取与上述直接参数有单值对应关系的间接参数作为被 控参数; (c)间接参数对产品质量应有足够的灵敏性; (d)应考虑工艺的合理性及仪表的性能价格比等; 特别说明:被控参数一般由工艺工程师确定,控制工程师无 多大选择余地。
第五章 简单控制系统的设计
c)按下表计算出P、I、D调节器的参数
(2)优缺点:
a)该法可直接在闭环状态下进行,且无需测试过程的动态特性; b)方法简单,使用方便;
第五章 简单控制系统的设计
第五章 简单控制系统的设计
(2)P调节对系统质量的影响:
a)比例调节是一种有差调节? b)比例调节系统的静差随比例带的增大而增大?比例带 的减少,意味着系统稳定性降低? c)比例调节不适合给定值随时间变化的情况;
d)增大 K C(即减小比例带),可以减少系统的静差,加 快系统的响应速度?这是因为: KP KC KC K P TP s 1 C (s) K KP R( s) TP s 1 K C K P Ts 1 1 KC TP s 1 KC K P TP K ,T (惯性减小) 1 KC K P 1 KC K P
机械精度设计基础及应用习题
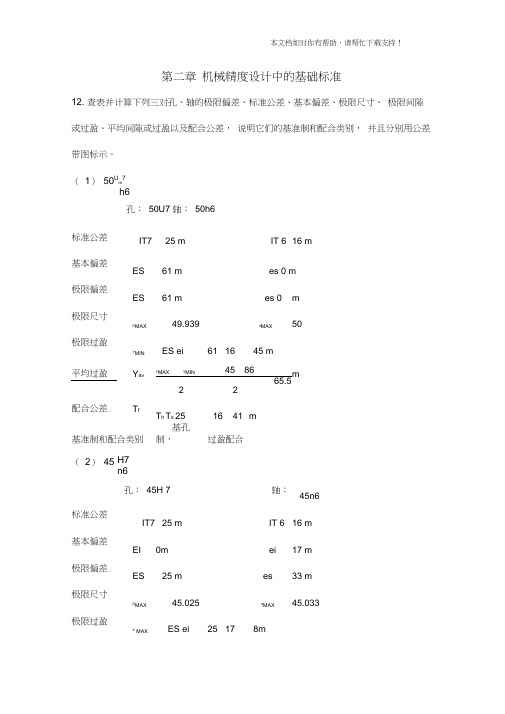
第二章机械精度设计中的基础标准12. 查表并计算下列三对孔、轴的极限偏差、标准公差、基本偏差、极限尺寸、极限间隙或过盈、平均间隙或过盈以及配合公差,说明它们的基准制和配合类别,并且分别用公差带图标示。
(1)50U h67h6孔:50U7 轴:50h6标准公差IT725 m IT 616 m基本偏差ES61 m es 0 m极限偏差ES61 m es 0m极限尺寸D MAX49.939d MAX50极限过盈Y MIN ES ei611645 m平均过盈Y av Y MAX Y MIN4586m2265.5配合公差T fT h T s 251641m基准制和配合类别基孔制,过盈配合(2)45H7n6孔:45H 7轴:45n6标准公差IT725 m IT 616 m基本偏差EI0m ei17 m极限偏差ES25 m es33 m 极限尺寸D MAX45.025d MAX45.033极限过盈X MAX ES ei25178m或过盈YMAX EI es 0 3333 m配合公差T f T h T s 25 16 41 m基准制和配合类别 基轴制,间隙配合孔或轴最大极限尺寸最小极限尺寸上偏差下偏差 公差 尺寸标注孔 10-0.015 -0.003 0.015孔 15+0.017+0.006 0.011孔 30+0.012-0.009 0.021轴 50-0.050 -0.112 0.062轴 80+0.009-0.021 0.030轴 1000 -0.0220.022下列配合中,它们分别属于哪种基准制的配合和哪类配合,并确定孔和轴的最大间隙或最小过盈,最小间隙和最大过盈1) 50H f88 基孔制间隙配合H6 140r5标准公差IT7 25 mIT 6 16 m 基本偏差EI 9mes 0 m 极限偏差ES 34 mes 0 m极限尺寸 D MAX40.034d MAX40极限间隙X MAXES ei 3416 50 m平均间隙X avX MAX X MIN50929.5 m孔: 40G7轴: 40h622平均过盈 XMAX Y MAX8 33 212.5 m配合公差 T f T h T s 25 16 41 m基准制和配合类别 基孔制,过渡配合 3)40G7 h63)基孔制过盈配合(6) 50 H js76基孔制过渡配合19 习题图1 所示为圆锥齿轮毛坯,下列有关要素为形位公差要求,试按形位公差标准规定将其标注在图样上。
机械设计第五章
由表5-5查得接合面间的摩擦系数 f=0.16,并取
Cb 0.2 Cb Cm Cm 0.8 Cb Cm
(P84)
取防滑系数Ks=1.2,则各螺栓所需要的预紧力为
5)上面每个螺栓所受的总拉力F2按式(5-34)求得:
3.确定螺栓直径 选择螺栓材料为Q235、性能等级为4.6的螺栓,由表5-8 查得材料屈服极限=240MPa,由表5-10查得安全系数S=1.5 故螺栓材料的许用应力
螺栓预紧力F0后,在工作 拉力F 的作用下,螺栓总拉力 式中F1为残余预紧力,为保证联 接的紧密性,应使 F1>0
未拧紧
已拧紧
加载
当螺栓承受工作载荷F后: (1)被联接件的压缩力由预紧力F0,减至残余预紧力F1 (2)螺栓所受的拉力由预紧力F0增加到F2= F+ F1; 消去F1,得到 消去 螺栓相对刚度 (越小越好)
悬臵螺母和环槽螺母都是全部或局部改变螺母旋合部 分的变形性质,使之变为拉伸变形,使螺纹牙上载荷分布 趋于均匀;
内斜螺母可使载荷较大的头几圈螺纹牙容易变形,使 载荷上移而改善载荷分布不均。
(三)减小应力集中的影响 在螺栓上的螺纹、螺栓头和螺栓杆的过渡处以及螺栓 横截面突变处等应力集中较大处卸荷结构。
5-5螺栓组联接的设计
一、螺栓组联接的结构设计
螺纹联接组的设计1
第5章 滚动轴承公差与配合
Dsmax ,Dsmin —加工后实测的最大、最小单一外径
第三节
滚动轴承内、外径及相配轴颈、外壳孔公差带
与滚动轴承配合的轴径和外壳孔的常用公差带 为实现各种松紧程度的配合性质要求,国标规定 0 级和6 级轴承与轴颈和外壳孔配合时轴颈和外壳孔的常用公差 带,轴颈17种,外壳孔16种 从图可见,轴承 Δd 内圈与轴颈的配合 比GB/T1801-1999 中基孔制同名配合 偏紧一些
第三节
滚动轴承内、外径及相配轴颈、外壳孔公差带
轴承内圈常与轴一起旋转,为防止内圈和轴颈配合产生 相对滑动而磨损,影响轴承工作性能,要求配合面之间 有一定的过盈量,但由于内圈是薄壁零件,过盈量不能 太大。如果作为基准孔轴承内圈仍采用基本偏差为 H公差 带,轴颈也选用光滑圆柱结合国家标准中的公差带,这 样在配合时,无论选过渡配合(过盈量偏小)或过盈配 合(过盈量偏大)都不能满足轴承工作的需要。若轴颈+ 0 采用非标准公差带,则违 2 4 5 6(6x) 反了标准化与互换性的原则。 0 轴承外径 D 的公差带 国标规定:轴承内圈基准 + 0 孔公差带位于以公称直径d为 2 4 5 6(6x) 0 零线的下方,且上偏差为零 轴承内径 d 的公差带
第三节
滚动轴承内、外径及相配轴颈、外壳孔公差带
有关计算公式
dmp =(dsmax +dsmin)/ 2 Dmp =(Dsmax + Dsmin)/ 2 Vdp =(dsmax -dsmin ) VDp =(Dsmax - Dsmin)
式中,
dsmax ,dsmin —加工后实测的最大、最小单一内径
mp mp
d
D
第三节
滚动轴承内、外径及相配轴颈、外壳孔公差带
机械精度设计基础_3版(孟兆新,马惠萍主编)PPT模板
章 渐 开 线 圆 柱 齿
7
01 7.1齿轮传动的使用 02 7.2影响渐开线圆柱
要求
齿轮精度的因素
03 7.3渐开线圆柱齿轮 04 7.4渐开线圆柱齿轮
精度的评定参数
精度标准
05 7.5渐开线圆柱齿轮 06 习题7
精度设计
09
O
N
E
第8章尺寸链的计算
第8章尺寸链的计 算
8.1尺寸链的基本概念 8.2用完全互换法解尺寸链 8.3大数互换法解尺寸链 8.4用其他方法解装配尺寸链 习题8
05
3.5几何公 差的选用
03
3.3几何误 差的评定
06
习题3
05
O
N
E
第4章表面粗糙度
第4章表面粗糙度
4.1基本概念 4.2表面粗糙度的评定 4.3表面粗糙度的选用 4.4表面粗糙度符号、代号及其注法 习题4
06
O
N
E
第5章几何参数检测技术基础
测第
技 术 基 础
章 几 何 参
第2章尺寸精度设 计
2.1有关尺寸精度设计的基本术语和 定义 2.2尺寸的极限与配合国家标准简介 2.3尺寸精度设计的基本原则和方法 2.4一般公差(线性尺寸的未注公差) 习题2
04
O
N
E
第3章几何精度设计
第3章几何精度设计
01
3.1几何误 差
04
3.4几何公 差与尺寸公
差的关系
02
3.2几何公 差
感谢聆听
章 常 用 典
型
零
6
01 6.1滚动轴承结合的 02 6.2平键、矩形花键
精度设计
结合的精度设计
《几何量精度设计与检测(第2版)》第3章习题参考解答
第3章习题参考解答3-1将下列各项几何公差要求标注在题图3-1上。
(1)003.032-φmm 圆柱面对两个0021.020-φmm 轴颈的公共轴线的径向圆跳动公差为0.015mm ;(2)两个0021.020-φmm 轴颈的圆度公差为0.010mm ;(3)003.032-φmm 圆柱面左右两端面分别对两个0021.020-φmm 轴颈的公共轴线的轴向圆跳动公差为0.020mm ;(4)0036.010-mm 键槽中心平面对0 03.032-φmm 圆柱面轴线的对称度公差为0.015mm 。
3-1解:题图3-13-2将下列各项几何公差要求标注在题图3-2上。
(1)底面的平面度公差为0.012mm ;(2)两个021.0020+φmm 孔的轴线分别对它们的公共轴线的同轴度公差皆为0.015mm ;(3)两个021.0020+φmm 孔的公共轴线对底面的平行度公差为0.010mm 。
(4)其余要素的几何精度皆按GB/T 1184中H 级要求。
3-2解:未注几何公差按GB/T 1184-H题图3-23-3将下列各项几何公差要求标注在题图3-3上。
(1)左端面的平面度公差为0.01mm;(2)右端面对左端面的平行度公差为0.04mm;(3)φ70mm孔采用H7遵守包容要求,φ210mm外圆柱面采用h7并遵守独立原则;(4)φ70mm孔轴线对左端面的垂直度公差为0.02mm;(5)φ210mm外圆柱面轴线对φ70mm孔的同轴度公差为0.03mm;(6)4×φ20H8孔轴线对左端面(第一基准)及φ70mm孔轴线的位置度公差为φ0.15mm(要求均布),被测轴线的位置度公差与φ20H8孔尺寸公差的关系采用最大实体要求,与基准孔尺寸公差的关系也采用最大实体要求。
3-3解:题图3-33-4将下列各项几何公差要求标注在题图3-4上。
(1)孔径Ø25H6采用包容要求;(2)Ø70的左端面的平面度公差为0.010mm;(3)Ø70的左端面相对于Ø25孔轴线的垂直度公差为0.020mm;(4)锥面直线度公差为0.020mm,锥面圆度公差为0.010mm。