摆线针轮减速器的设计答辩 ppt课件
摆线针轮减速器的设计答辩
传动机构简图
精品课件
构造
精品课件
构造
(1)转臂 转臂是摆线针轮减速器的输入构件,它一般由输入轴、偏心套和转臂轴承组成。其中,输入轴与电机轴相连;偏心套有 两个,径向对称地安装于输入轴上,分别用于安装相位相差 180°的两个摆线轮;偏心套与摆线轮之间通过滚动轴承连 接,该组轴承称为转臂轴承。近年来,转臂轴的结构常与偏心套制作为一个整体,成为整体式双偏心轴承,它是摆线轮 的旋转轴。 (2)摆线轮 摆线轮是以短幅外摆线的内侧等距曲线作为传动齿廓的传动齿轮,它是摆线针轮减速器的核心构件。分析该减速器的传 动原理可知,理论上一个摆线轮就能实现运动的传递。但实际机构一般采用两个相同的摆线轮沿径向对称安装,以使摆 线轮在与针轮啮合过程中实现静力平衡,减轻振动,提高减速器的承载能力。 (3)针轮 针轮是摆线针轮减速器的关键部件之一。它主要由针齿壳、针齿销和针齿套组成。当摆线轮与针齿套相啮合时,针齿套 可绕针齿销转动,因而将其与摆线轮啮合中的相对滑移运动转化为纯滚动,以减少啮合摩擦损失。 (4)W 输出机构 摆线针轮减速器中,摆线轮作既有公转又有自转的平面一般运动,要将其自转运动输出为输出轴的定轴转动,需通过 W 输出机构实现。W输出机构主要由法兰盘、若干柱销和摆线轮上开有的柱销孔组成。其中,柱销的一端固定在输出轴的法 兰盘上,另一端插入两摆线行星轮端面的等分孔中,在柱销的悬臂上装有可移动的柱销套以减少摩擦损失。经过 W 输出 机构传递后,摆线轮的自转运动可 1:1 地传递到输出轴上,带动输出轴转动。
精品课件
03 优化设计
精品课件
优化方案
国内主要生产使用的摆线针轮减速器结构存在一些问题,影响减速器整体性能的主要设计原理上的根本问题在于摆线轮 与固定针齿销之间因相对滑动而导致效率损失、噪声、发热等问题,也是长久以来困扰国内企业, 最难克服的问题,本文 的解决思路呢是: 通过增大针齿销的直径,并给针齿销加上针齿套,同时依靠对摆线轮的齿廓修形使摆线轮与针齿之间变为滚动摩擦。以减 少啮合和相对滑动造成的摩擦损失,但是当针齿套半径大于理论摆线齿廓的最小曲率半径时,就会使得在生成实际摆线齿 廓时产生顶切现象,在实际齿廓上出现尖点。所以要进行相关计算验证。
摆线针轮减速机原理演示图及结构

摆线针轮减速机原理演示图及结构,维护等所有知识1.它的原理像两个银币,一个静止另一个靠在它的边上转,当转动的币从一个点转回原来的点时它已经转了两转不是一转。
2.示意图不好画,我讲解一下。
它里面是齿轮组成的,动静齿轮的结合不是像银币那样外边接合。
而是一个外边和另一个内边啮合构成一组,这样可以节省空间,即使多组结合也可以叠在一个圆筒内。
圆筒的输入和输出轴是在同一个圆心上的,但是内部的齿轮并不同心,主动轮比从动轮小沿轴摆动,同时沿边滚动。
带动从动轮滚动;从动轮又带动下一主动轮沿轴摆动···如此直到输出轴。
每组齿数和齿轮组数决定变速比。
3。
日常只要保证机油的正常就可以了。
4. 容易发生密封圈漏油现象,换密封圈就好了。
换时只要拆电机螺丝,不要拆减速机螺丝。
拆完再拆电机风叶罩。
转动风叶同时拔出电机。
换好后装电机时也要转动风叶。
还有油泵也容易出问题。
透明油管容易漏油。
拆解减速机时一定要记住每个齿轮的方向标记,以便装回。
行星齿轮减速机:主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.关于行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星摆线针轮减速机:全部传动装置可分为三部分:输入部分、减速部分、输出部分。
摆线针轮减速器的设计计算

摆线针轮减速器的设计计算4.1摆线轮、针齿、柱销的计算
设计计算如下:
4.2 输出轴的计算结构图如图4-1,
图4-1 输出轴结构装配图设计计算如下:
由前面的轴的结构知, 1F 、211169881081698854F F F ì+=ïïíï? ïî受力中心距离为116mm ,2F 、3F 受力中心距离为50mm,因
1F =5600N ,故
2325600116166(5600)F F F ì+=ïïí
ï? ïî
得2F =8014N , 3F =2414N 。
进行校核时,通常只校核轴上承受最大弯矩和扭矩的
4.3输入轴的计算
其结构装配图如图4-2
图4-2 输入轴结构装配图
由前面知, r F 作用点到1F 、2F 作用点的距离相等,都为54mm ,
211169881081698854
F F F ì+=ïïíï? ïî 得,1F =8494N ,2F =8494N 。
进行校核时,通常只校核轴上承受最大弯矩和扭
4.4 其它零件的设计
其它零件的设计见草图,在此不作说明。
4.5 润滑与密封
本减速机采用油浴润滑,润滑油选择中极齿轮油。
若在低温或高温环境以及在启动频烦的场合,须跟据情况重新选择适宜润滑油。
对于本减速器,在严重恶劣负荷条件中工作时,推荐采用双曲线齿轮油。
密封件选择J型无骨架油封。
针齿壳上开有沟槽,油浸深度为20~40mm。
摆线针轮减速机原理33页PPT

摆线针轮减速机原理
51、没有哪个社会可以制订一部永远 适用的 宪法, 甚至一 条永远 适用的 法律。 ——杰 斐逊 52、法律源于人的自卫本能。——英 格索尔
53、人们通常会发现,法律就是这样 一种的 网,触 犯法律 的人, 小的可 以穿网 而过, 大的可 以破网 而出, 只有中 等的才 会坠入 网中。 ——申 斯通 54、法律就是法律它是一座雄伟的大 夏,庇 护着我 们大家 ;它的 每一块 砖石都 垒在另 一块砖 石上。 ——高 尔斯华 绥 55、今天的法律未必明天仍是法律。 ——罗·伯顿
谢谢!
36、自己的鞋子,自己知道紧在哪里。——西班牙
37、我们唯一不会改正的缺点是软弱。——拉罗什福科
xiexie! 38、我这个人走得很慢,但是我从不后退。——亚伯拉罕·林肯
39、勿问成功的秘诀为何,且尽全力做你应该做的事吧。——美华纳
摆线针轮减速器
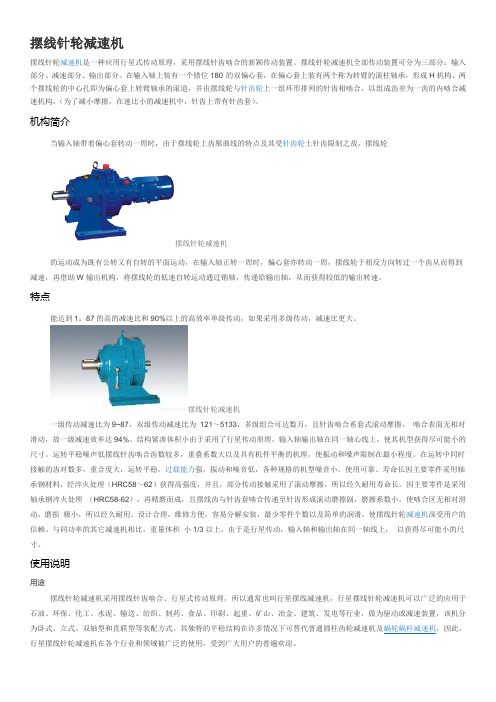
摆线针轮减速机摆线针轮减速机是一种应用行星式传动原理,采用摆线针齿啮合的新颖传动装置。
摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。
在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个称为转臂的滚柱轴承,形成H机构、两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿相啮合,以组成齿差为一齿的内啮合减速机构,(为了减小摩擦,在速比小的减速机中,针齿上带有针齿套)。
机构简介当输入轴带着偏心套转动一周时,由于摆线轮上齿廓曲线的特点及其受针齿轮上针齿限制之故,摆线轮摆线针轮减速机的运动成为既有公转又有自转的平面运动,在输入轴正转一周时,偏心套亦转动一周,摆线轮于相反方向转过一个齿从而得到减速,再借助W输出机构,将摆线轮的低速自转运动通过销轴,传递给输出轴,从而获得较低的输出转速。
特点能达到1:87的高的减速比和90%以上的高效率单级传动,如果采用多级传动,减速比更大。
摆线针轮减速机一级传动减速比为9~87,双级传动减速比为121~5133,多级组合可达数万,且针齿啮合系套式滚动摩擦,啮合表面无相对滑动,故一级减速效率达94%。
结构紧凑体积小由于采用了行星传动原理,输入轴输出轴在同一轴心线上,使其机型获得尽可能小的尺寸。
运转平稳噪声低摆线针齿啮合齿数较多,重叠系数大以及具有机件平衡的机理,使振动和嗓声限制在最小程度。
在运转中同时接触的齿对数多,重合度大,运转平稳,过载能力强,振动和噪音低,各种规格的机型噪音小。
使用可靠、寿命长因主要零件采用轴承钢材料,经淬火处理(HRC58~62)获得高强度,并且,部分传动接触采用了滚动摩擦,所以经久耐用寿命长。
因主要零件是采用轴承钢淬火处理(HRC58-62),再精磨而成,且摆线齿与针齿套啮合传递至针齿形成滚动磨擦副,磨擦系数小,使啮合区无相对滑动,磨损极小,所以经久耐用。
设计合理,维修方便,容易分解安装,最少零件个数以及简单的润滑,使摆线针轮减速机深受用户的信赖。
摆线针轮减速机原理图上课讲义

摆线针轮减速机原理图摆线针轮减速机原理图、结构图、性能及型号表示法摆线针轮减速机原理/摆线减速机结构原理行星摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。
在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个滚柱轴承,形成H机构,两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿轮相啮合,以组成少齿差内啮合减速机构,(为了减少摩擦,在速比小的减速机中,针齿上带有针齿套)。
当输入轴带着偏心套转动一周时,由于摆线轮上齿廊曲线的特点及其受针齿轮上针齿限制之故,摆线轮的运动成为即有公转又有自转的平面运动,在输入轴正转一周时,偏心套亦转动一周,摆线轮于相反方向上转过一个齿差从而得到减速,再借助W输出机构,将摆线轮的低速自转运动通过销轴,传递给输出轴,从而获得较低的输出转速。
武英牌摆线减速机原理/行星摆线针轮减速机结构、参数、性能及表示法一、行星摆线针轮减速机/摆线减速机是一种比较新型的传动机构,其独特的平稳结构在许多情况下可替代普通圆柱齿轮减速机及蜗轮蜗杆减速机,因为摆线针轮减速机具有:1、传动比大:摆线针轮减速机一级减速时传动比为1:7到1:87;两级减速时转动比为121~7569,用户也可以根据自己的实际需要选用减速比更大的三级减速!2、传动效率高:摆线针轮减速机由于该机啮合部位采用了滚动啮合,一般效率为可达90%以上。
3、保养方便(润滑方式):#6125以下使用不要保养的専用高级油脂;4、体积小,重量轻:摆线针轮减速机采用行星传动原理,输入轴和输出轴在同一轴线上而且有与电动机直联呈一体的独特之处,因而摆线针轮减速机本身具有结构紧凑,体积小、重量轻的特点。
用它代替两级普通圆柱齿轮减速器,体积可减少1/2~2/3;重量约减轻1/3~1/2。
5、拆装方便,容易维修:由于摆线针轮减速机结构设计合理、拆装简单便于维修,使用零件个数少以及润滑简单。
摆线针轮减速机培训讲议PPT课件

封环损坏
第12页/共16页
故障 现象
产生原因
处理方法
3 输出轴端油封损坏或紧 3 更换新油封,或将原紧固
固环外圆表面磨损
环去掉,更换
4 结合面螺栓松动
4 将螺栓配合弹簧垫圈紧固
5 润滑油中不洁物及杂物 5 将陈油放尽,冲洗机内后,
渗漏油 太多,使油封磨损加快 更换新油及油封
6 润滑油过多,运转中形 6 按油标的规定油面加油,
感谢您的观看!
第16页/共16页
第7页/共16页
3.2. X系列摆线针轮减速机
XW底脚式卧装双轴摆线针轮减速机 XL法兰式立装双轴摆线针轮减速机 XWD底脚式卧装普通电动机直联型摆线针轮减速机 XLD法兰式立装普通电动机直联型摆线针轮减速机 XWD底脚式卧装普通电动机直联型摆线针轮减速机 XLY法兰式立装专用电动机直联型摆线针轮减速机
第1页/共16页
摆
线
针
轮
减培
速训
机
讲 议
第2页/共16页
第3页/共16页
1.传动原理
摆线针轮减速机根据少齿差行星传动 原理设计而成的,行星轮(摆线轮) 轮齿为摆线齿,太阳轮(针轮)为针 齿,两者组成摆线针轮合副,针轮齿 数Zp与摆线齿轮数Zc的差为1。在传 动过程中,转臂将输入运动传递给摆 线轮。由于固定针轮的作用,摆线轮 产生与输入运动相反的低速自转运动, 再通过W机构输出。
第10页/共16页
3、使用可靠,寿命长:因主要零件是采用高碳合 金钢淬火处理 (HRC58-62),再精磨而成,且摆 线齿与针齿套啮合传递至针齿形成滚动磨擦付, 磨擦系数小,使啮合区无相对滑动,磨损 极小, 所以经久耐用。
4、结构紧凑,体积小:与同功率的其它减速机 相比,重量体积 小1/3以上,由于是行星传动, 输入轴和输出轴在同一轴线上, 以获得尽可能小 的尺寸。
摆线针轮减速器的设计答辩 ppt课件
具体设计
查询工业机器人相关资料,从常用大小的机器人出发,取30kw为功率,1500r/min为转速,25为传动比, 进行了摆线轮齿数,针齿数,输出转矩的一系列确定,和一系列计算:
以上是主要的设计计算,论文中还有输入轴和输出轴的计算以及密封轮滑设计。
04 研究内容
研究内容
根据得到的公式数据利用solidworks进行了三维绘图,这里重点讲一下摆线轮的绘制,因为摆线齿廓的复杂程 度,不可能直接画出来,具体方法呢是把计算得到的摆线轮齿廓曲线数据记下来,把程序得到的720个点坐标 保存为txt格式,然后在solidworks3014中采用插入-曲线-通过xyz点的曲线,再浏览导入数据来生成齿廓曲线, 就得到了摆线齿廓曲线,最后进行拉伸,和柱销孔的切除和阵列命令就得到了我们需要的摆线轮。
04研究内容研究内容根据得到的公式数据利用solidworks进行了三维绘图这里重点讲一下摆线轮的绘制因为摆线齿廓的复杂程度不可能直接画出来具体方法呢是把计算得到的摆线轮齿廓曲线数据记下来把程序得到的720坐标保存为txt格式然后在solidworks3014中采用插入曲线通过xyz点的曲线再浏览导入数据来生成齿廓曲线就得到了摆线齿廓曲线最后进行拉伸和柱销孔的切除和阵列命令就得到了我们需要的摆线轮零件图我的具体绘图摆线轮我的具体绘图输入轴我的具体绘图偏心的转臂轴承我的具体绘图我的具体绘图法兰盘零件图爆炸图爆炸图视频2d装配图2d2d摆线轮2d2d法兰盘2d2d偏心转臂轴承2d2d输入轴2d2d感谢各位老师指导老师
03 优化设计
优化方案
国内主要生产使用的摆线针轮减速器结构存在一些问题,影响减速器整体性能的主要设计原理上的根本问题在于摆线轮 与固定针齿销之间因相对滑动而导致效率损失、噪声、发热等问题,也是长久以来困扰国内企业, 最难克服的问题,本文 的解决思路呢是: 通过增大针齿销的直径,并给针齿销加上针齿套,同时依靠对摆线轮的齿廓修形使摆线轮与针齿之间变为滚动摩擦。以减少 啮合和相对滑动造成的摩擦损失,但是当针齿套半径大于理论摆线齿廓的最小曲率半径时,就会使得在生成实际摆线齿廓 时产生顶切现象,在实际齿廓上出现尖点。所以要进行相关计算验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传动机构简图
构造
构造
(1)转臂 转臂是摆线针轮减速器的输入构件,它一般由输入轴、偏心套和转臂轴承组成。其中,输入轴与电机轴相连;偏心套有 两个,径向对称地安装于输入轴上,分别用于安装相位相差 180°的两个摆线轮;偏心套与摆线轮之间通过滚动轴承连 接,该组轴承称为转臂轴承。近年来,转臂轴的结构常与偏心套制作为一个整体,成为整体式双偏心轴承,它是摆线轮 的旋转轴。 (2)摆线轮 摆线轮是以短幅外摆线的内侧等距曲线作为传动齿廓的传动齿轮,它是摆线针轮减速器的核心构件。分析该减速器的传 动原理可知,理论上一个摆线轮就能实现运动的传递。但实际机构一般采用两个相同的摆线轮沿径向对称安装,以使摆 线轮在与针轮啮合过程中实现静力平衡,减轻振动,提高减速器的承载能力。 (3)针轮 针轮是摆线针轮减速器的关键部件之一。它主要由针齿壳、针齿销和针齿套组成。当摆线轮与针齿套相啮合时,针齿套 可绕针齿销转动,因而将其与摆线轮啮合中的相对滑移运动转化为纯滚动,以减少啮合摩擦损失。 (4)W 输出机构 摆线针轮减速器中,摆线轮作既有公转又有自转的平面一般运动,要将其自转运动输出为输出轴的定轴转动,需通过 W 输出机构实现。W输出机构主要由法兰盘、若干柱销和摆线轮上开有的柱销孔组成。其中,柱销的一端固定在输出轴的 法兰盘上,另一端插入两摆线行星轮端面的等分孔中,在柱销的悬臂上装有可移动的柱销套以减少摩擦损失。经过 W 输 出机构传递后,摆线轮的自转运动可 1:1 地传递到输出轴上,带动输出轴转动。
03 优化设计
优化方案
国内主要生产使用的摆线针轮减速器结构存在一些问题,影响减速器整体性能的主要设计原理上的根本问题在于摆线轮 与固定针齿销之间因相对滑动而导致效率损失、噪声、发热等问题,也是长久以来困扰国内企业, 最难克服的问题,本文 的解决思路呢是: 通过增大针齿销的直径,并给针齿销加上针齿套,同时依靠对摆线轮的齿廓修形使摆线轮与针齿之间变为滚动摩擦。以减少 啮合和相对滑动造成的摩擦损失,但是当针齿套半径大于理论摆线齿廓的最小曲率半径时,就会使得在生成实际摆线齿廓 时产生顶切现象,在实际齿廓上出现尖点。所以要进行相关计算验证。
具体设计
查询工业机器人相关资料,从常用大小的机器人出发,取30kw为功率,1500r/min为转速,25为传动比, 进行了摆线轮齿数,针齿数,输出转矩的一系列确定,和一系列计算:
以上是主要的设计计算,论文中还有输入轴和输出轴的计算以及密封轮滑设计。
04 研究内容
研究内容
根据得到的公式数据利用solidworks进行了三维绘图,这里重点讲一下摆线轮的绘制,因为摆线齿廓的复杂程 度,不可能直接画出来,具体方法呢是把计算得到的摆线轮齿廓曲线数据记下来,把程序得到的720个点坐标 保存为txt格式,然后在solidworks3014中采用插入-曲线-通过xyz点的曲线,再浏览导入数据来生成齿廓曲线, 就得到了摆线齿廓曲线,最后进行拉伸,和柱销孔的切除和阵列命令就得到了我们需要的摆线轮。
零件图
我的具体绘图
摆线轮
我的具体绘图
输入轴
我的具体绘图
偏心的转臂轴承
我的具体绘图
针齿壳
我的具体绘图
针齿销和针齿套
我的具体绘图
法兰盘
零件图
爆炸图
爆炸图视频
2D图
装配图2D
2D图
摆线轮2D
2D图
端盖图2D
2D图
法兰盘2D
2D图
偏心转臂轴承2D
2D图
输入轴2D
2D图
针齿壳2D
• “太阳当空照,花儿对我笑,小鸟说早早早……”
01 课题背景
课题背景:传统的齿轮减速器应用广泛,但已经跟不上当代工业传动的高级要求,而摆线针轮减速器作为一种拥有更小 体积,更大传动比,更轻重量,而且精度更高的传动装置,广泛应用于现代工业机械中。这几年该类减速器开始向工业 机器人领域发展,从2013年开始,中国成为全球最大的机器人市场,在当时,我们国家机器人零件自产自足的比例只占 到5%左右,而在2015工博会上,秦川机床展示了机器人基础关键件“机器人关节”,国产化率已达70%。秦川机床不仅 研发出机器人关节,而且能够制造生产机器人关节的机床。在这种势头之下,机器人用摆线针轮减速器的研究和优化迫 在眉睫,对工业机器人国产化的推动起着重要作用。
摆线针轮减速器的设计
汇报人:傅秋鑫 指导老师:姜少杰
目录
CONTENTS01Fra bibliotek课题背景
02 构造及原理
03
优化设计
04
研究内容
精品资料
• 你怎么称呼老师?
• 如果老师最后没有总结一节课的重点的难点,你 是否会认为老师的教学方法需要改进?
• 你所经历的课堂,是讲座式还是讨论式? • 教师的教鞭
• “不怕太阳晒,也不怕那风雨狂,只怕先生骂我 笨,没有学问无颜见爹娘 ……”
02 构造及原理
原理
虽然之前对减速器有一定的接触,但是拿到课题的时候,对摆线传动这种原理是一无所知的,然后经过较长时间的资料 查询,和自己的学习理解,终于搞懂了其中的原理。摆线针轮减速器,首先顾名思义我们明确一个摆线的概念,摆线就 是一个圆沿着一条直线作纯滚动,那么圆上一个固定点经过的轨迹就称为摆线。外切外摆线是滚圆在基圆外域与基圆外 切形成的外摆线(此时基圆在滚圆的外域)。短幅外摆线是指外切外摆线形成过程中,滚圆内域上与滚圆相对固定的某点的 轨迹, 而短幅外摆线的内侧等距曲线的传动齿廓就是我们需要的摆线齿廓。