桥梁缆索检测机器人设计-电源输送小车设计 缆索机器人-电源输送小车
拼接式应急桥梁铰结构对整体挠曲变形影响
·桥梁·隧道·文章编号:1009-6825(2012)22-0173-02拼接式应急桥梁铰结构对整体挠曲变形影响漆礼慧浮涛桂睿(北京工业大学建筑工程学院,北京100124)摘要:基于ABAQUS 有限元软件,对研发的应急桥梁结构节段拼装处构造对整体变形的影响进行软件模拟,分析结果表明,局部连接对结构整体挠曲变形影响很小。
关键词:应急桥梁,局部连接,有限元分析,挠度中图分类号:U441文献标识码:A0引言我国是一个地震多发国家,一半以上大城市位于烈度7度区内[1]。
在地震发生后,道路桥梁常常遭到不同程度的损坏,当桥梁受损而直接影响道路通行能力时,灾后的应急救援工作就变得尤为困难。
地震发生后救援的最佳时间一般是3d 以内[2],这期间,救援人员、物资和设备的迅速到达对于保证人民生命安全显得尤为重要,因此针对快速恢复桥梁的通行能力而设计的应急桥梁则被视为最有效的手段之一。
这种应急桥梁在结构上要求采用模块化设计、运输便利、拼装组合方便灵活;在满足承载力的同时,还能满足不同跨径的需要,且具有结构形式新颖、稳定性好、跨越能力强等特点。
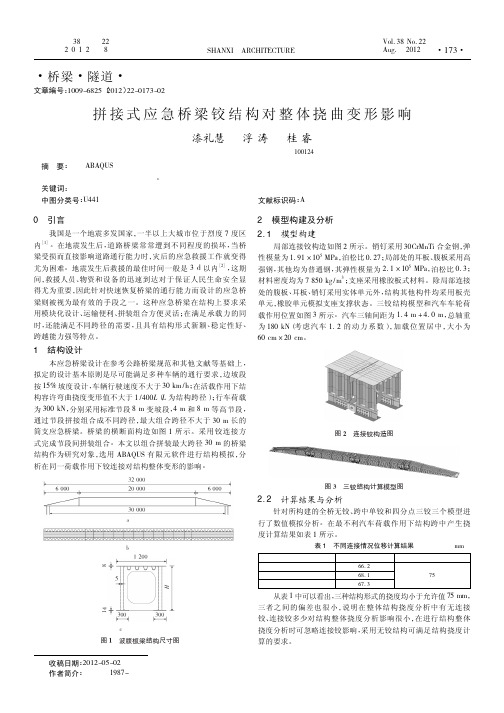
1结构设计本应急桥梁设计在参考公路桥梁规范和其他文献等基础上,拟定的设计基本原则是尽可能满足多种车辆的通行要求,边坡段按15%坡度设计,车辆行驶速度不大于30km /h ;在活载作用下结构容许弯曲挠度变形值不大于1/400L (L 为结构跨径);行车荷载为300kN ,分别采用标准节段8m 变坡段,4m 和8m 等高节段,通过节段拼接组合成不同跨径,最大组合跨径不大于30m 长的简支应急桥梁。
桥梁的横断面构造如图1所示。
采用铰连接方式完成节段间拼装组合。
本文以组合拼装最大跨径30m 的桥梁结构作为研究对象,选用ABAQUS 有限元软件进行结构模拟,分析在同一荷载作用下铰连接对结构整体变形的影响。
32000200006000600030000a )立面图b )平面图1200300300H1485c )跨中横断面图图1波腹板梁结构尺寸图2模型构建及分析2.1模型构建局部连接铰构造如图2所示。
斜拉桥-独塔单索面非对称斜拉桥研究资料

1 绪论1.1 课题研究背景斜拉桥是一种由塔、梁、索3 种基本构件组成的高次超静定组合桥梁结构体系[1]。
斜拉桥的桥面体系是以主梁受压或受弯为主,而其支承体系是以拉索受拉和索塔受压为主。
斜拉索由桥塔上部引出并多点弹性支承于桥跨,这样的结构形式使斜拉桥的主梁受力类似于连续梁,从而大大降低了主梁截面弯矩,有效地提高了主梁的跨越能力。
从斜拉桥的结构形式和主梁、索塔、斜拉索三大构件的受力特征看,斜拉桥具有形式多样、造型美观,主梁高度不高、优良的跨越能力等特点;斜拉桥的设计结构特点包括计算机结构分析和计算、高次超静定结构、应用有限单元法;与其它桥型相比,斜拉桥的特性包括:斜拉桥是跨径250m~600m 的最合适桥型,而斜拉跨径600m~1000m 时,斜拉桥是仅次于悬索桥的合适桥型[2]。
由于斜拉桥的种种优点,斜拉桥已广泛应用于现代城市桥梁和大跨度桥梁的建设当中。
然而,在斜拉桥的运营过程中,由于频繁承载甚至承受超载,加上长期的自然侵袭以及人为事故造成的损坏,斜拉桥会产生各种病害。
随着服役年限的增长,桥梁发生病害的部位会越来越多,损坏程度也会越来越严重另一方面,在结构上来说,斜拉桥属于柔性结构,在风力、地震力其他自然及人为的动力影响时容易发生振动,这些振动对于斜拉桥的受力来说是不利的。
斜拉索是斜拉桥的核心组成部分,现用的斜拉索绝大多数为钢制斜拉索,但钢斜拉索存在很多问题,如振颤、防腐、锚固点的应力疲劳等。
其中斜拉索及其锚具的防腐问题尤为显著,由于斜拉索锈蚀而导致斜拉桥被迫换索已经占到了相当高的比例[4]。
对于已建斜拉桥,在其营运过程中某些构件损坏尤其是斜拉索损伤会导致桥梁极限承载能力的降低甚至导致突然坠毁事故,这些问题给人们生活和社会稳定带来极大的安全隐患。
因此,对既有营运斜拉桥病害检测及加固研究工作显得尤为必要。
1.2 国内外研究现状1.2.1 斜拉桥病害检测研究现状早在20 世纪50年代开始,人们就开始着手研究桥梁损伤问题,进入70 年代之后,桥梁检测工作已经被运用于桥梁工程,用来评定桥梁的成桥质量。
输煤皮带巡检机器人技术方案

输煤皮带机器人技术及实施方案合肥市信同信息科技有限公司版本修订记录:目录1 概述 (4)1.1编写目的和背景 (4)1.2 参考资料 (4)2 需求概述 (4)2.1 目标 (4)2.2 巡检环境 (5)2.3 功能需求概述 (5)3技术指标 (5)3.1 电源适应性 (5)3.1.1运动性能要求 (5)3.1.2云台性能要求 (5)3.1.3自动导航定位要求 (5)3.2 通讯性能要求 (5)3. 3 巡检作业设备性能要求 (6)3.4 轨道要求 (6)3.5 可靠性要求 (6)4系统概要设计 (6)4.1 系统架构设计 (6)4.2 终端层设计 (7)4.2.1 机器人本体设计 (7)4.2.2 轨道系统设计 (7)4.2.3 通信系统设计 (7)4.3 基站层系统设计 (8)3.3 智能终端监控软件设计 (9)5设备布置及安装 (9)6智能控制与数据分析软件 (11)7售后服务 (14)附件1:产品参数 (16)1 概述1.1编写目的和背景为实现减人增效,对运输皮带实施智能自动巡检系统,本系统主要由矿用皮带机沿线巡检装置、光纤测温系统、皮带数据传输系统三部分组成,系统形成后可实现皮带机设备全线范围内的移动巡检,能够连续采集、传输、存储现场的图像、声音、温度、烟雾等数据;对沿线皮带托辊进行全线温度检测;将现有皮带保护系统数据上传;最终通过巡检机器人+光纤测温+皮带保护组成综合型皮带智能自动巡检系统,实现运行数据、保护、视频由本系统地面服务器统一汇总对设备运行条件综合对比和分析制定完善的控制方案。
1.2 参考资料本项目依据的国家标准、技术导则和技术规程主要有:●IEC:国际电工协会●GB 4798.4-90 电工电子产品应用环境条件无气候防护场所使用●GB 2423.10-89 电工电子产品基本环境试验规程●GB/T17626.2 静电放电抗扰度试验●GB/T17626.3 射频电磁场辐射抗扰度试验●GB/T17626.8 工频磁场的抗扰度试验●DL/T 664-2008 带电设备红外诊断应用规范●GB/T 2423.4.8-2008 电工电子产品环境试验第2 部分:试验方法试验Db交变湿热●GB 4208-2008 外壳防护等级(IP 代码)●《国家电网公司“十二五”及中长期科技发展规划战略研究》●《国家电网公司关于印发推进变电站无人值守工作方案的通知》(国家电网运检〔2013〕178 号)●《巡检机器人需求规格说明书》2 需求概述2.1 目标实现巡检机器人的基本功能。
AGV机械结构设计分析

AGV机械结构设计分析发布时间:2021-07-21T01:54:49.459Z 来源:《中国科技人才》2021年第10期作者:郭帅[导读] 传统的工作搬运车是需要进行人工操作的,具有劳动强度高、效率低下以及空间利用率低等缺点,但是AGV系统是对传统的搬运车机械系统中的控制系统进行了创新,完全使用无人化作业,大幅减少了工作人员的劳动强度、提高了工作效率且增加了空间利用率。
上海大界机器人科技有限公司上海 200000摘要:近年来,现代控制技术、计算机科学技术以及机械设计技术都在不断发展,柔性制造系统在运输、物流以及仓储等各个领域当中的应用范围越来越广泛。
AGV是自动导引运输车的关键分支,具有节能、工作效率高等特点,完善AGV系统可以缩短物流运转周期以及生产周期,提高企业的经济效益,因此本文将对AGV机械结构设计进行简要分析,以期为相关研究提供帮助。
关键词:AGV系统;机械结构;设计前言:传统的工作搬运车是需要进行人工操作的,具有劳动强度高、效率低下以及空间利用率低等缺点,但是AGV系统是对传统的搬运车机械系统中的控制系统进行了创新,完全使用无人化作业,大幅减少了工作人员的劳动强度、提高了工作效率且增加了空间利用率。
目前,我国AGV技术已经较为成熟,但是很多工厂的自动化程度仍然较低,究其原因除了使用环境限制之外、其高昂的价格及维护成本让人怯步,所以我们应当在保证质量的前提下降低成本。
本文针对AGV小车的部分基础件做研究,教我们如何选择及设计一款AGV的内部基础构件,降低AGV的设计门槛,从而提高AGV在为我国各个行业的应用,并为智能制造2025贡献一份绵薄之力。
1.电动机设计AGV具有智能性、高效性以及灵活性等特点。
首先,AGV可以与自动化仓库以及机器人进行联合作业。
其次,AGV系统具有较强的柔性,所以进行系统扩展的难度较小。
第三,AGV可以控制物流系统。
第四,AGV可以重组,所以可以对系统进行重新布置。
新标准关键要点:公路钢结构桥梁制造和安装施工规范JTG-T3651-2022
公路钢结构桥梁制造和安装施工规范JTG-T3651-2022
一、总则
•钢结构桥梁的制造宜积极推广应 用数字化、自动化和信息化的先 进技术、工艺和设备。包括BIM 技术、三维建模、数控设备以及 工业机器人等。
二、术语
• 应理解主要焊缝含义 :主要零件的纵、横向对接焊缝及主要零件之间 的连接焊缝。包括顶板、底板、腹板的横向和纵向对接焊缝,构件节段 的横桥向对接焊缝,横隔板、纵隔板立位对接焊缝,T 型接头和角接接 头熔透角焊缝等。
三、关键要点
• 节点板不宜接长或接宽;特殊情况下需接宽时,焊缝错开的最小距离应符合图6.1.2-2 的规定。
三、关键要点
• 钢管拱弦管的接料长度应不小于 1000mm,且不小于钢管直径。焊缝错开的最小距离应符合图 6.1.23 的规定。
三、关键要点
• U 形肋与桥面板应采用自动定位或机械定位组装机进行组装,有利于提高精度,保证工程质量。 • 钢箱梁节段组装时,应按设计或施工监控的要求设置预拱度;大型扁平钢箱梁组装时,宜在横桥向
三、关键要点
• X 射线透照时间短、速度快,检查厚度小于 30mm 时,显示缺陷的灵敏度高,但设备复杂、费用大, 穿透能力比γ射线小。
γ射线能透照 300mm 厚的钢板,透照时不需要电源,方便野外工作,用于环缝时可一次曝光,但透照 时间长,一般不能用于小于 50mm 构件的透照。
三、关键要点
• 钢桁梁、钢板梁的杆件在成批制造之前,应进行试拼装;试拼装的目的是检验图纸、工装、工艺的 准确性和合理性
三、关键要点
• 钢锚梁通常由拉板、壁板、锚下承压板和锚垫板等零件组成
三、关键要点
• 钢锚箱通常由拉板、壁板、锚下承压板、锚垫板、腹板和加劲隔板等零件组成
【计算机工程与设计】_运动检测_期刊发文热词逐年推荐_20140726
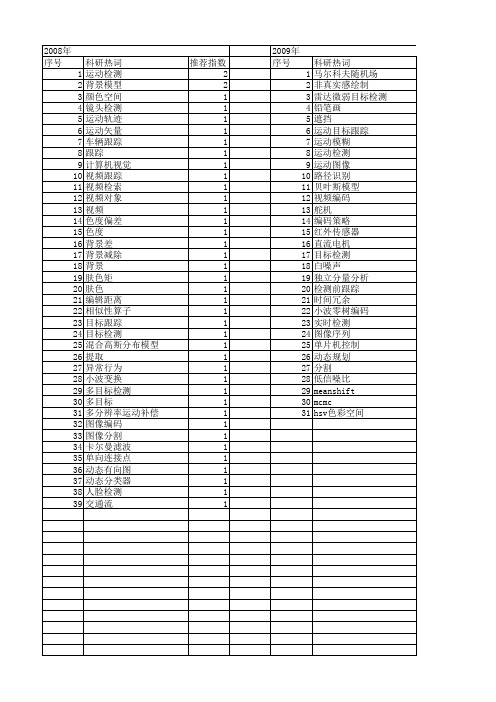
科研热词 运动检测 背景模型 颜色空间 镜头检测 运动轨迹 运动矢量 车辆跟踪 跟踪 计算机视觉 视频跟踪 视频检索 视频对象 视频 色度偏差 色度 背景差 背景减除 背景 肤色矩 肤色 编辑距离 相似性算子 目标跟踪 目标检测 混合高斯分布模型 提取 异常行为 小波变换 多目标检测 多目标 多分辨率运动补偿 图像编码 图像分割 卡尔曼滤波 单向连接点 动态有向图 动态分类器 人脸检测 交通流
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74
2011年 科研热词 运动目标检测 蛇形机器人 背景差 混合高斯模型 帧间差分 帧间差 webots opencv 鱼眼摄像 阴影去除 阴影 闪动 运动背景 运动模糊参数 运动检测 运动前景 运动估计 边缘检测和连接 边缘检测 车辆检测 跟踪 视频认证 视频稳定 视频监测 行人识别与跟踪 螺旋滚动步态 螺旋攀爬运动 自嵌入水印 背景重构 背景模型 背景建模 背景差分 背景减除法 肤色分割 缆索检测 线检测 粒子群优化算法 粒子群优化 积分微分算子 短模糊尺度 短信告警 目标检测 现场可编程门阵列 独立分量分析 流水线结构 模板 椭圆肤色模型 检测 桥梁缆索 框架 机器视觉 最小二乘拟合 推荐指数 3 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
斜拉桥-独塔单索面非对称斜拉桥研究资料
1 绪论1.1 课题研究背景斜拉桥是一种由塔、梁、索3种基本构件组成的高次超静定组合桥梁结构体系[1]。
斜拉桥的桥面体系是以主梁受压或受弯为主,而其支承体系是以拉索受拉和索塔受压为主。
斜拉索由桥塔上部引出并多点弹性支承于桥跨,这样的结构形式使斜拉桥的主梁受力类似于连续梁,从而大大降低了主梁截面弯矩,有效地提高了主梁的跨越能力。
从斜拉桥的结构形式和主梁、索塔、斜拉索三大构件的受力特征看,斜拉桥具有形式多样、造型美观,主梁高度不高、优良的跨越能力等特点;斜拉桥的设计结构特点包括计算机结构分析和计算、高次超静定结构、应用有限单元法;与其它桥型相比,斜拉桥的特性包括:斜拉桥是跨径250m~600m的最合适桥型,而斜拉跨径600m~1000m时,斜拉桥是仅次于悬索桥的合适桥型[2]。
由于斜拉桥的种种优点,斜拉桥已广泛应用于现代城市桥梁和大跨度桥梁的建设当中。
然而,在斜拉桥的运营过程中,由于频繁承载甚至承受超载,加上长期的自然侵袭以及人为事故造成的损坏,斜拉桥会产生各种病害。
随着服役年限的增长,桥梁发生病害的部位会越来越多,损坏程度也会越来越严重[3]。
另一方面,在结构上来说,斜拉桥属于柔性结构,在风力、地震力其他自然及人为的动力影响时容易发生振动,这些振动对于斜拉桥的受力来说是不利的。
斜拉索是斜拉桥的核心组成部分,现用的斜拉索绝大多数为钢制斜拉索,但钢斜拉索存在很多问题,如振颤、防腐、锚固点的应力疲劳等。
其中斜拉索及其锚具的防腐问题尤为显著,由于斜拉索锈蚀而导致斜拉桥被迫换索已经占到了相当高的比例[4]。
对于已建斜拉桥,在其营运过程中某些构件损坏尤其是斜拉索损伤会导致桥梁极限承载能力的降低甚至导致突然坠毁事故,这些问题给人们生活和社会稳定带来极大的安全隐患。
因此,对既有营运斜拉桥病害检测及加固研究工作显得尤为必要。
11.2 国内外研究现状1.2.1 斜拉桥病害检测研究现状早在20世纪50年代开始,人们就开始着手研究桥梁损伤问题,进入70年代之后,桥梁检测工作已经被运用于桥梁工程,用来评定桥梁的成桥质量。
【计算机工程与设计】_运动仿真_期刊发文热词逐年推荐_20140727
科研热词 量化矩阵 进攻 运动控制卡 运动图像专家组 路径 足球机器人 视频编码 视频压缩 视频传输 现场可编程门阵列 比赛环境 服务质量 帧内预测 实时 多重优先级 外设部件互连标准总线 分频 分组调度 低比特率 伺服电机 乒乓操作 bezier曲线 8*8变换
推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73
实时检测 块运动估计 在线控制 变形 卡尔曼滤波器 动态规划 加速度约束 列投影 几何模型 决策算法 像素点抽取 低信噪比 传接球 仿人机械手 人工神经网络 二值化 三维设计 open inventor hsv色彩空间 h-滤波器
科研热词 推荐指数 仿真 2 高斯分布 1 领导-跟随者算法 1 预报 1 雷达数据处理 1 雷达回波幅度 1 雅克比矩阵 1 队形变换 1 阀值 1 链路质量信息 1 逻辑描述 1 运动搜索 1 运动估计 1 车辆运动信息 1 车用自组织网络 1 路由判据 1 语义 1 计算机辅助人机工程 1 裂纹缺陷 1 蒙特卡洛法 1 船舶模型 1 船舶 1 航空反潜 1 航向控制器 1 自适应神经模糊推理系统 1 编队控制 1 神经网络 1 目标跟踪 1 滤波精度 1 混合搜索 1 波浪 1 横摇 1 模糊控制 1 模糊几何特征 1 模糊c均值聚类 1 模型 1 柔性肢体 1 数据关联算法 1 数字化人体模型 1 搜索概率 1 广义代数旋转曲面 1 定性视觉 1 多机器人 1 多机动目标跟踪 1 吊放声纳 1 卡尔曼滤波 1 几何建模 1 位置信息 1 ι -φ 控制器 1 x光图像 1 h.264/avc 1
一种新型轨道供电重载RGV的研制
Jun. 2022Vol. 51 No. 62022年6月 第51卷第6期机械设计与制造工程Machine Design and Manufacturing Engineering DOI : 10. 3969/j. issn. 2095 -509X. 2022.06.011一种新型轨道供电重载RGV 的研制冯 敏1,刘望保1,马梦珍1,王自超S 胡均平彳(1•株洲优瑞科有色装备有限公司,湖南株洲412001)(2.中国十五冶金建设集团有限公司工程总承包事业部,湖北黄石435216)(3.中南大学机电工程学院,湖南长沙410006)摘要:针对自动化立体仓库项目中重载货物长距离、换向定点转运的难题,提出了一种低压轨道供电、自带旋转功能的重载链条输送技术解决方案,取代输送机输送,并基于该方案设计了 一种重载输送的有轨制导车辆(RGV)。
为了保证RGV 的性能,进行了充分的相关理论计算,并运用Solidworks Simulaiton 进行静力学有限元分析验证结构的合理性;为了避免RGV 高速运动状态下出现共振,保证整车的运行平顺性,对RGV 的关键部件进行了模态分析,并对该RGV 进行了试制与实验,验证了它的可靠性。
关键词:RGV ;力学分析;控制软件;试制中图分类号:TH122 文献标识码:A 文章编号:2095 - 509X(2022)06 - 0055 - 05国内有色冶炼企业设备的自动化程度和冶炼技术水平近年来都有大幅度的提高,比如在铜冶炼厂全自动电解行车、高度智能化剥片机组的应用等 等,大大提高了各企业的生产效率,取得了很好的社会效益和经济效益但是成品阴极铜的仓储以及转运工艺却相对落后,由剥片机组生产出来 的阴极精铜,还是用叉车人工叉取转场至堆场;在物流装运方面,企业也是靠人工操作叉车或行车进行装车作业,但作业车间邻近电解槽,处于弱酸性 环境中,环境较恶劣,而且人工作业劳动强度高,生 产效率非常低。
(完整版)搬运机器人设计
搬运机器人设计班级:姓名:学号:搬运机器人能够模仿人手部的部分动作,按照设定的程序、轨迹和要求,代替人工在高温和危险的作业区进行单调持久的作业,实现一些人工不可能完成的工作,这不仅可以使人手避免出现可能的危险情况,保障生产安全,还能促进工作线的流水化,提高了工作效率,降低了劳动强度,改善了劳动环境,已经成为现代制造业中不可或缺的一种自动化装置。
本机器人用于生产线上工件的自动搬运,下图为机器人动作示意图,机械手按下述顺序周而复始地工作:根据对机器人的工艺过程及控制要求分析,机械手的动作过程如图所示:一、搬运机械手总体结构设计(1)该机器人采用圆柱坐标型,具有三个自由度,即手臂的伸长、缩短,手臂的上升、下降和整体旋转。
(2)该机器人采用液压驱动,其具有体积小、质量轻、结构紧凑、传动平稳、操作简单、安全、经济、易于实现过载保护且液压元件能够自行润滑等一系列优点。
(3)在控制方式选择上,由于其功能只是在两个传送带之间搬移工件,运动简单,控制要求不高,因此采用点位控制方式。
(4)此搬运机器人是在两个工作台之间搬运工件,其动作比较简单,选用电位器进行定位。
(5)此机器人应用于自动生产线上,因此,它应该能够按照控制程序自动运行,即具有自动运行模式。
二、搬运机械手机械结构设计1、机身设计因为圆柱坐标式机器人把回转与升降两个自由度归属于机身,所以设计回转与升降机身,选用旋转液压缸与升降液压缸单独驱动的回转型机身,如图1所示,升降液压缸在上,旋转液压缸在下。
2、臂部设计采用双导向杆的臂部伸缩结构。
缸体直接固定在升降立柱上,活塞杆与两根导向杆连接一起组成伸缩臂,由于活塞杆与导向杆全部藏在缸体内,油管也从活塞杆内部通过,其特点是结构紧凑,外观整洁。
结构如图2所示。
3、手部腕部设计因为工件的形状为圆柱形,所以带“V”型钳口的手爪,本次设计的搬运机器人手爪采用滑槽杠杆式结构,夹紧缸采用单作用弹簧复位式结构,杠杆端部固定安装着圆柱销,当拉杆向上拉时,圆柱销就在两个钳爪的滑槽中移动,带动钳爪绕两支点回转,夹紧工件;拉杆向下推时,使钳爪松开工件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文) 缆索机器人-电源输送小车 - 1 - 毕 业 设 计 说 明 书
缆 索 检 测 机 器 人 -电源输送小车 毕业设计(论文) 缆索机器人-电源输送小车
- 2 - 摘 要:
缆索体系桥梁的出现,使得桥梁的建设实现了前所未有的跨度。然而,根据以往工程经验,多数缆索体系桥梁的可靠性引起了工程界的重视。国内外对这一问题进行了长达二十余年的研究,然而目前研究成果还很不足,本文在这方面进行研究工作,以期对该领域的研究做出贡献。
针对现代斜拉桥对安全和美观的越来越高要求,提出用大倾斜度缆索机器人进行高 空缆索检测和维护的新方法。采用电驱动摩擦轮压紧使机器人沿缆索连续爬升或气驱动气缸 夹紧蠕动爬升,利用随带的喷涂、磁检测等装置,实现了在役缆索的涂装、内部检测等作业 ,已在上海徐浦大桥上成功进行了现场试验,取得满意的效果。
关 键 词 :斜 拉 桥 缆 索 ,携 带 机 构 ,缆 索 检 测 毕业设计(论文) 缆索机器人-电源输送小车
- 3 - Abstract: The emergence of cable-system enables engineers to challenge unprecedented span bridge construction. However, according to existing engineering experience, the severe reliability problems in a considerable number bridges raise intense concern from engineering society. Research work has being done by engineers at home and abroad for over twenty years, which proves quite insufficient for engineering needs. This paper engages the research of the reliability of cable-system, in the hope of promoting the research of this field. A new method of inspecting and maintaining high-altitude stay cables with a cab l e robot is presented in this paper,to meet urgent needs of its automation. The robot is driven along the cable by a electric running mechanism held by wheels, or a pneumatic worming mechanism clamped by air cylinders, with an air spray coa ting mechanism or a magnetic detector. The robot was done experiments on the Xup u Bridge and the results show that the robot can climb, coat and test stay cable s safely and efficiently.
Keywords: cable-stayed bridge cable, carrying bodies, Cable Detection 毕业设计(论文) 缆索机器人-电源输送小车
- 4 - 目 录 一.概 述……………………………………………………………5 二.现有技术…………………………………………………………9 三.技术方案…………………………………………………………10 四.力学分析…………………………………………………………12 五、爬升机构电机的选择和计算……………………………………16 六、辊轮轴设计………………………………………………………17 七、被动辊轮轴………………………………………………………22 八、轴承的校核………………………………………………………27 九、键的选择…………………………………………………………28 十、螺旋机构电机选择………………………………………………29 十一、螺旋传动计算…………………………………………………30 十二、移动电源………………………………………………………35 设计小结………………………………………………………………45 致 谢 ………………………………………………………………47 参考文献………………………………………………………………48 毕业设计(论文) 缆索机器人-电源输送小车
- 5 - 一、概 述 斜拉桥以其优美的外观及良好的抗震性越来越得到桥梁设计师的青睐。自从1956年在瑞典建成曹姆松特斜拉桥以来,到1993年全世界已有300余座斜拉桥。我国自1975年在四川云阳建成第一座斜拉桥之后,至今共建成40余座斜拉桥。
斜拉桥的主要受力构件是缆索,但其长期暴露在大气之中,受到风吹、日晒、雨淋和环境污染的侵蚀,其表面会受到较严重的破坏,这会对整座斜拉桥带来不利的影响。因此,对缆索的有效维护是十分必要的。人们在惊叹斜拉桥壮观的同时,也发现大多数斜拉桥的缆索都是黑色,色彩的单调影响了斜拉桥的魅力。所以,近年来彩化斜拉桥成了许多桥梁专家追求的目标。
到目前为止,国内外对斜拉桥缆索进行彩色涂装主要采用两种方法,一是针对小型斜拉桥使用液压升降平台进行缆索涂装;二是利用预先装好的塔顶的定点,用钢丝托动吊篮搭载工作人员沿缆索进行涂装。前一种方法的工作范围十分有限,后一种方法是许多斜拉桥采用的普遍方法,但采用人工方法进行高空涂装作业不仅效率低、成本高,而且危险性大,尤其是在风雨天就更加危险。为此,上海交通大学机器人研究所于1997年与上海黄浦江大桥工程建设处合作研制了一台斜拉桥缆索涂装维护机器人样机。
该机器人系统由两部分组成,一部分是机器人本体,一部分是机器人小车。机器人本体可以沿各种倾斜度的缆索爬升,在高空缆索上自动完成毕业设计(论文) 缆索机器人-电源输送小车 - 6 - 检查、打磨、清洗、去静电、底涂和面涂及一系列的维护工作。机器人本体上装有CCD摄像机,可随时监视工作情况。另一部分地面小车,用于安装机器人本体并向机器人本体供应水、涂料,同时监控机器人的高空工作情况。
该机器人具有以下功能: (1)沿索爬升功能。机器人可沿任意倾斜度的缆索爬升,可爬升的缆索标高为160米,缆索倾斜度0~90,可适应的缆索直径为90~100毫米,机器人爬升速度为8米/秒。
(2)缆索检测功能。机器人装有钢丝绳检测系统,可沿缆索检测钢丝是否有断丝,以便及时更换缆索。
(3)缆索清洗功能。在机器人本体上配备有各种形状的清洗刷和特定的水基清洗液,可完成缆索去尘、脱脂和去聚乙烯表面静电等工作。
(4)具有一定智能。机器人具有良好的人机交互功能,在高空可以判断是否到顶、风力大小等一些环境情况,并实施相应的动作。
斜拉桥以其观赏性好、承载能力强、跨越能力大、抗风稳定性高、工程造价经济等优点,成为公路、铁路及城镇道路建设中大跨径桥梁常用桥型之一,在世界范围内得到了广泛的应用。作为斜拉桥的主要受力部件缆索因暴露在空气中,长期受到风吹、日晒、雨淋及大气中污染物的侵蚀,其表面的聚乙烯保护套会出现隆起、破裂等现象,甚至保护套内的钢毕业设计(论文) 缆索机器人-电源输送小车 - 7 - 丝束会出现生锈、断丝等问题,严重影响了斜拉桥的观赏性并且给斜拉桥的安全埋下隐患。目前,缆索维护作业基本使用人工吊篮方式,成本高、效率低、安全性差。因此,研制缆索自动化检测机器人对缆索有效维护是十分必要的。针对潜在的缆索维护市场, 国内外多家机构参与了缆索维护机器人研究开发。
现有爬缆机构的运动方式主要有摩擦轮连续滚动式, 夹紧蠕动式两种。连续滚动式机构由于缆索的悬垂曲线、缆索风振动等外界因素影响, 摩擦轮的预紧力较难精确调整; 过大, 因摩擦消耗功率就越多; 过小,随机的外部干扰会使夹紧力不足, 爬升失效, 多数情况下为了提高可靠性只能牺牲能耗比。夹紧蠕动式机构对于截面尺寸有突变、表面情况恶劣的缆索具有较好的适应能力,但爬升和夹紧运动分别由2 套机构实现,运动较复杂, 浪费了过多因夹紧所耗的时间和能源。
截止至1999年上半年,我国从事机器人及其相关技术产品研制、生产的单位有200余个,研制、生产的各类工业的机器人约有50多种型号600台,其中已用于生产的约占5 / 6 。我国工业机器人经过20多年的发展,已在产业化的道路上迈开了步伐。1998年我国工业机器人及含工业机器人的自动化生产线和式程项目的产值和销售额已超过2亿元。国家"836"高技术计划已将中科院沈阳自动化所的机器人技术国家工程研究中心、哈尔滨工业大学的博实公司、国家机械工业局北京机械工业自动工化研究所机器人中心、上海交通大学的海泰公司、上海大学的机电一体工程中心和南开大学的太阳公司等确立为智能机器人主题的六个产业化基地。一汽、二汽、济南第二机床厂、中国船舶工业总发及应用成套的大型依托企业。国家机械工业局北京自动化所从第1台P J - 1喷涂机器人起,经