基于PWM的两相混合式步进电机细分驱动芯片的设计
四维彩超探头电机驱动电路和控制设计

四维彩超探头电机驱动电路和控制设计摘要:四维彩超探头通过步进电机带动二维凸阵换能器按要求的速度和角度来回摆动,探头发收超声波,加上时间维度,通过图像融合,得到四维动态视频图像。
电机驱动板基于 FPGA 输出两路 SPWM 正余弦波。
波形通过功率电路处理输出满足电机驱动要求的双极性正余弦波。
为适配不同规格的四维探头,通过DAC 调压输出正负电压,电机相线增加电流检测。
ADC 读取输出的可调电压值,及电机相线采样波形参数,整个驱动形成自检和闭环控制。
优化驱动电路和控制流程,提高电机控制精度,提升四维图像质量。
关键词:4D探头;步进电机;SPWM驱动;闭环;自检1绪论四维(four-dimensional,4D)彩超探头通过步进电机带动二维凸阵换能器摆动,二维凸阵探头摆动扫描过程中,超声前端控制换能器向人体发射超声波,当超声波到达声阻抗不同的界面时反射回波信号,其能够反映人体内不均匀组织的分布情况。
超声前端接收回波信号后,超声成像系统构建被检测部位的实时三维超声图像,加上时间维度,通过图像融合,构建四维动态视频图像。
4D探头的两相混合步进电机是通过脉冲控制角位移和改变脉冲频率调速。
步进电机有定位精度高,无积累位置误差,开环控制的优点。
步进电机控制方式多样,其驱动方式和运行性能关系很大。
驱动方式主要有常规 PWM 方波驱动和SPWM 正弦波脉宽调制驱动。
步进电机通过采用细分驱动控制的方式解决步进电机存在的步距脚大、转速不平稳,低速震动,噪音大,影响精度等缺点。
相比传统PWM,SPWM细分步距脚小,分辨率高。
4D探头步进电机一般采用 SPWM 恒流细分驱动,其是基于电机绕组电流波形控制的微步驱动方式。
MCU 或 FPGA 输出两路相位相差90°的SPWM正余弦波,通过对电流细分实现细分步距脚,使电机恒流平稳运行。
传统驱动电路功率部分采用双H桥MOS管实现SPWM恒流斩波细分驱动。
采样MOS管能提供大电压大电流,4D探头一般采用微型的小步进电机,额定电压和电流都比较小,一般采用两路功率运放,分别输出正负正余弦波,驱动电机运动和换相。
PWM控制芯片+推挽结构驱动电路

PWM 控制芯片+推挽结构驱动电路
1.PWM 控制芯片+推挽结构驱动电路构成方案的基本结构形式
PWM 控制芯片+推挽结构驱动电路构成方案的基本结构形式非常简单,如图4 所示。
推挽驱动器只用到两只N 沟道功率场效应管V1、V2,并将升压变压器T 的中性抽头接于正电源Vcc,两只功率管V1、V2 交替工作,输出得到交流电压,由于功率晶体管共地,所以驱动控制电路简单;另外由于变压器具有一定的漏感,可限制短路电流,因而提高了电路的可靠性。
对于推挽结构的驱动电路,要求直流电源Vcc 的变化范围要小,否则,会使驱动电路的效率降低。
因此,推挽结构不适用于笔记本电脑,但对于液晶显示器和液晶彩电非常理想,因为逆变器直流电源电压通常会稳定在±20%以内。
电路工作时,在PWM 控制芯片的控制下,使推挽电路中两个开关管V1 和V2 交替导通,在一次绕组L1 和L2 两端分别形成相位相反的交流电。
基于pwm技术的无刷直流电机的调速系统设计大学论文
基于PWM技术的无刷直流电机的调速系统设计Brushless DC Motor Speed Control System Based On PWM摘要无刷直流电机(BLDCM)具有调速性能优异、运行性能可靠和维护方便等优点,相较于有刷直流电机,其采用电子换向取代机械换向,有效地提高了电动机的运行效率,也使得其成品体积更加的轻巧。
但是无刷直流电机也存在转矩脉动、控制器复杂、成本较高等缺陷,这些缺陷的存在也一定程度上影响了无刷直流电机作为高效、先进电机在应用上的普及,因此研究如何改善以及解决无刷直流电机存在的问题便具有更加明显的现实意义。
MATLAB是一款用于数据分析与计算、算法开发以及动态系统建立与仿真的数学软件。
最初是由美国MathWorks公司出品的商用数学软件,其由Matlab和Simulink 两个重要组成部分构成,现在更是应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
本文通过对无刷直流电机结构以及工作原理的研究与分析,找出导致其具有较大转矩脉动的原因,并先从理论上得到如何抑制转矩脉动的方法,再通过Matlab 建立起无刷直流电机的仿真模型,对其仿真结果进行分析与改善,从而有效地抑制无刷直流电机的转矩脉动。
关键词:无刷直流电机,转矩脉动,仿真模型AbstractBrushless DC motor (BLDCM) has excellent speed performance, reliable performance and easy maintenance, etc., compared to a brush DC motor, which uses electronically commutated replace mechanical commutation, effectively improve the operating efficiency of the motor, but also so that the volume of the finished product more compact. But there brushless DC motor torque ripple controller complexity, high cost and other defects, the presence of these defects also affected to some extent, a brushless DC motor as efficient and advanced motor universal in application, how to improve and therefore research solve the problems of the brushless DC motor will have more obvious practical significance.MATLAB is a tool for data analysis and computation, algorithm development, and simulation of dynamic systems to establish and mathematical software. MathWorks was originally developed by the US company produced commercial mathematical software, which consists of Matlab and Simulink are two important parts, and now it is used in engineering calculations, control design, signal processing and communications, image processing, signal detection, financial modeling design and analysis and other fields.Based on the brushless DC motor structure and working principle of research and analysis to identify the cause of which has a large torque ripple, and theoretically first get how to suppress torque ripples, established through Matlab brushless Simulation Model DC motor, its simulation results are analyzed and improved in order to effectively suppress the torque ripple of the brushless DC motorKeywords:Brushless DC motor; The torque pulsation; The simulation model目录第一章绪论 (6)1.1 研究背景及研究意义 (6)1.2 无刷直流电机调速系统的国内外研究现状 (7)1.3 本文的主要研究内容及章节安排 (8)第二章无刷直流电机的基本原理 (9)2.1 无刷直流电机的基本结构 (9)2.1.1 电机本体 (9)1.电动机定子 (9)2. 电动机转子 (10)2.1.2 位置传感器 (10)2.2 无刷直流电机的工作原理及换相过程 (12)2.2.1 无刷直流电机的工作原理 (13)2.2.2 无刷直流电机的换相过程 (15)2.3 无刷直流电机的应用 (16)2.4 本章小结 (16)第三章基于PWM技术的无刷直流电机转矩脉动抑制 (17)3.1 PWM控制技术简介 (17)3.1.1 PWM控制技术的基本原理 (17)3.1.2 PWM控制技术的控制方法 (18)3.2 Buck变换器的原理及控制方式 (19)3.2.1 Buck变换器的原理 (19)3.2.2 Buck变换器的控制方式 (20)3.3 无刷直流电机转矩脉动的产生 (20)3.3.1传导区转矩脉动 (21)3.3.2换相区转矩脉动 (22)3.4 无刷直流电机转矩脉动的抑制 (24)3.5 本章小结 (27)第四章无刷直流电机的仿真分析 (28)4.1 MATLAB和SIMULINK的介绍 (28)4.2 无刷直流电机的数学模型 (29)4.2.1电机本体模块 (30)4.2.2转矩计算模块 (31)4.2.3速度控制模块 (32)4.2.4电流控制模块 (32)4.2.5电压逆变模块 (33)4.3无刷直流电机的仿真结果 (33)4.4本章小结 (38)结论 (39)致谢 (40)参考文献 (41)附录 (42)第一章绪论1.1 研究背景及研究意义对于工厂生产和社会发展而言,电力拖动都有着举足轻重的地位,为了满足生产工艺的需求,通过控制电机的转矩以及转速来控制电动机的转速以及位置,这样就可以形成一个自动化系统,称之为电力拖动。
三相混合式步进电机驱动器设计原理和控制详解
上海昀研自动化科技有限公司自2004年起致力于三相混合式步进电机及驱动器的开发,42系列低压三相混合式步进电机,57系列低压、高压三相混合式步进电机,86系列低压、高压三相混合式步进电机,110、130系列高压三相混合式步进电机,YK3605MA,TK3411MA,YK3822MA,YKA3722MA等多款产品已成功应用于市场。
上海昀研自动化科技有限公司生产的三相混合式步进电机采用交流伺服原理工作,转子和定子的直径比高达50%,高速时工作扭矩大,低速时运行极其平稳,几乎无共振区。
其配套驱动器YK3822MA具有单相220V/50Hz输入,三相正弦输出,输出电流可设置,具有十细分和半流额定值60%功能;控制方式灵活,有“脉冲+方向控制”,也有“正转脉冲+反转脉冲”控制方式;有过热保护功能,因此使用起来十分的方便。
1.前言步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。
与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。
但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等,又严重制约了步进电机的应用范围。
步进电机的运行性能与它的驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。
相对于其他的驱动方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨率,而且可以减少或消除低频振动,使电机运行更加平稳均匀。
总体来说,细分驱动的控制效果最好。
因为常用低端步进电机伺服系统没有编码器反馈,所以随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。
所以在速度和精度要求不高的领域,其应用非常广泛。
因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以三相混合式步进电机比二相步进电机有更好应用前景。
传统的三相混合式步进电机控制方法都是以硬件比较器完成,本文主要讲述使用DSP及空间矢量算法SVPWM来实现三相混合式步进电机控制。
基于正弦细分驱动技术的步进电机控制系统设计
0引言步进电机作为精密仪表中常用的自动执行部件,具有结构简单、成本低、快速起停、精确步进、易于控制、无累计误差和计算机接口方便等优点,在数控机床等设备中得到了广泛的应用。
基于单片机控制的步进电机系统控制精度高、运行稳定,在控制领域有着广泛的应用[1]。
采用正弦细分驱动技术可以大大减少低速转动时的振动和噪音[2],还可以起到减小步距角、提高分辨率、增大输出力矩的效果,采用升降频控制技术,则可以克服步进电机高速起停时存在的堵转、丢步或者过冲等问题,使步进电机转动得更加平稳、定位更加精确。
本文采用单片机为核心组成步进电机控制系统,通过单片机的驱动程序来控制步进电机的各种动作,以实现传统的步进电机的高度自动化,通过键盘实现对步进电机的正转、反转以及速度快慢的控制,并采用数码管直观显示步进电机的正反转以及步进电机的转速。
1步进电机控制原理1.1正弦细分驱动技术步进电机的工作原理本质上靠励磁绕组产生的旋转的合磁场带动转子做同步运动。
不细分时步进电机的合磁场将以一个固定的角度旋转,如果对这个角度进行细分,则可以实现对步距角的细分,只要控制流过各个绕组的电流的大小和方向就可以控制步进电机各个绕组产生的合磁场的大小和方向,当步进电机工作在整步或半步时,只需对绕组进行正、反向通断电控制,工作在细分状态下就需要精确控制流过绕组电流的大小。
1.2脉冲宽度调制技术目前一般采用脉冲宽度调制(PWM)技术来精确控制绕组电流的大小。
PWM技术是建立在以下理论基础上:冲量相等而形状不同的窄脉冲加在具有惯性基于正弦细分驱动技术的步进电机控制系统设计*张新荣1,徐保国2(1.淮阴工学院电子与电气工程学院,江苏淮安223003;2.江南大学信控学院,江苏无锡214122)摘要:将步进电机与AT89C51单片机紧密结合起来,运用正弦细分驱动技术,通过编程的方法,对步进电机的正转、反转以及速度快慢等进行控制,使其在一定范围内运行,可以方便灵活地控制步进电机的运行状态,以实现传统的步进电机控制的高度自动化。
THB6128芯片说明书
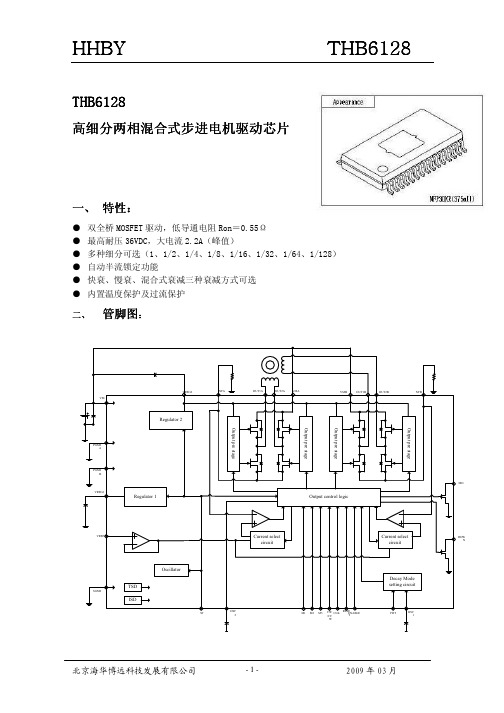
THB6THB6128128高细分高细分两相混合式步进电机两相混合式步进电机两相混合式步进电机驱动驱动驱动芯片芯片芯片一、 特性特性::● 双全桥MOSFET 驱动,低导通电阻Ron=0.55Ω ● 最高耐压36VDC,大电流2.2A(峰值)● 多种细分可选(1、1/2、1/4、1/8、1/16、1/32、1/64、1/128) ● 自动半流锁定功能● 快衰、慢衰、混合式衰减三种衰减方式可选 ● 内置温度保护及过流保护 二、 管脚管脚图图:MODOWN:管脚说明:三、管脚说明端子No 端子符号 端子说明17 DOWN 通电锁定时输出端14/23 SGND 信号地20 OSC1 斩波频率设定电容连接端18 PFD 衰减模式选择电压输入端15 VREF 电流设定端11 VMB B相 电机电源连接端28 M1 细分设置端27 M2 细分设置端26 M3 细分设置端13 OUT2B B相 OUTB输出端10 NFB B相 电流检测电阻连接端9 OUT1B B相 OUTB输出端12 PGNDB B相 功率地7 OUT2A A相 OUTA输出端6 NFA A相 电流检测电阻连接端3 OUT1A A相 OUTA输出端4 PGNDA A相 功率地25 ENABLE 脱机信号控制端24 RESET 复位信号输入端5 VMA A相 电机电源连接端21 CLK 脉冲信号输入端22 CW/CCW 正/反转信号输入端19 OSC2 通电锁定检出时间设定电容连接端16 MO 位置检出Monitor端30 VREG1 内部稳压器用电容连接端1 VREG2 内部稳压器用电容连接端2 VM 电机电源连接端29 ST/VCC 待机控制端:电器参数:四、电器参数1、最高额定值Absolute Maximum Ratings (Ta = 25°C)项目 符号 额定值 符号最高耐压 VMmax 36 V最大输出电流 Iomax 2.2 A最高逻辑输入电压 VINmax 6 VVREF最高输入电压 VREFmax 3 V工作环境温度 Topg -20~+85 ℃保存环境温度 Tstg -55~+150 ℃ 运行参数范围Operating Range (Ta =30 to 85°C)2、正常正常运行参数范围参数 符号 最小 典型. 最大 单位 逻辑输入电压 VIN 4.5 5.0 6 V电源电压 VM9 36 V输出电流 Io 2 A电流设定端 VREF0 3V3、电器特性Electrical Characteristics (Ta = 25°C, VREF =1.5 V, VM = 24 V)项目 符号 条件 最小 标准 最大 符号 待机时消耗电流 IMstn ST=”L” 200 μA 消耗电流 IM ST=”H”、OE=”H”、无负载 4 mA TSD温度 TSD 180 ℃ Thermal Hysteresis值 ΔTSD 40 ℃ 逻辑端子输入电流IinL1 VIN=0.8V 8 μAIinH1 VIN=5V 50 μA 逻辑输入“H”Level电压 Vinh 2.0 V 逻辑输入“L”Level电压 Vinl 0.8 V FDT端子“H”Level电压 Vfdth 3.5 V FDT端子“M”Level电压 Vfdtm 1.1 3.1 V FDT端子“L”Level电压 Vfdtl 0.8 V斩波频率 Fch Cosc1=100pF 100 KHz OSC1端子充放电电流 Iosc1 10 μA 斩波振荡电路Vtup1 1 V电压阈值 Vtdown1 0.5 V VREF端子输入电流 Iref VREF=1.5V -0.5 μA DOWN输出残电压 VolDO Idown=1mA 400 mV MO端子残电压 VolMO Imo=1mA 400 mV 通电锁定切换频率 Falert Cosc2=1500pF 1.6 Hz OSC2端子充放电电流 Iosc2 TBD μA 通电锁定切换振荡电路Vtup2 TBD V电压阈值 Vtdown2 TBD V REG1输出电压 Vreg1 5 V REG2输出电压 Vreg2 19 V Blanking时间 Tbl 1 uS 输出Ronu Io=2.0A、上側ON阻抗 0.3 Ω 输出ON阻抗Rond Io=2.0A、下側ON阻抗 0.25 Ω 输出漏电流 Ioleak VM=36V 50 μA 二极管正向压降 VD ID=-2.0A 1 V电流设定基准电压 VRF VREF=1.5V、電流比100% 300 mV 输出短路保护Timer Latch时间 Tscp 256 μs五、 使用说明使用说明1、细分设定细分设定((M1M1、、M2M2、、M3M3))2、衰减模式设定PFD 为衰减方式控制端,调节此端电压可以选择不同的衰减方式,从而获得更好的驱动效果。
步进电机细分驱动控制系统设计
步进电机细分驱动控制系统设计姓名:张凯学号: 20104977指导老师:杨小平、杞宁组员:张凯 20104977 (组长)张明 20104991王涛 20104978合肥工业大学电子科学与应用物理学院电子科学与技术系概述步进电机在输入状态发生变化时会转过一定的角度,输入状态不变时不会转动,且在不细分输入情况下每次转过较大的角度,再细分情况下每次转过较小的角度。
本设计是利用 FPGA 实现四相步进电机细分驱动控制,并且系统既能实现步进电机的细分驱动又能实现不细分驱动,还能实现步进电机的正、反转控制。
设计方案与实现下图是通过Quartus Ⅱ综合产生的RTL级电路图。
整个电路共分为6大模块:32进制可加可减计数器(cnt32)、16进制(自加)计数器(cnt16)、4位输出选择器(dec2)、4个4位比较器(new_comp:moto5、moto6、moto7、moto8)、查找表(rom32)、4位输入4位输出2选1多路选择器(mux2to1)。
其中,u_d控制正反转,s选择细分和不细分,en控制停和转,y[3:0]接步进电机的4相输入,clk0和clk5为时钟,且clk5>>clk0(本课设选clk0=4Hz,clk5=32768Hz)。
设步进电机的4相输入分别为A、B、C、D。
细分: cnt32计数输出5位数据送rom32,rom32输出16位数据分别送new_comp:moto5、moto6、moto7、moto8的a[3:0]端口与cnt16计数送来的4位数据b[3:0]比较。
如果a>=b,则agb=1’b1;反之agb=1’b0。
由于clk5>>clk0,从而agb能输出一段占空比稳定的信号(只持续1个或多个clk0周期),即产生1/4、2/4、3/4信号。
再如果s为高电平,则就能实现步进电机的细分输入。
不细分:如果s为低电平,则mux2to1选通由dec2送来的非细分信号dataa[3:0],从而实现步进电机的非细分输入。
基于DSP的双PWM变频调速系统的设计
第16卷 第4期广东有色金属学报Vol.16,No.42006年12月J OURNAL OF GUAN G DON G NON 2F ERROUS METAL SDec.2006收稿日期6作者简介邱涛(8),男,黑龙江五常人,硕士研究生文章编号:100327837(2006)0420301204基于DSP 的双PWM 变频调速系统的设计邱 涛,陈林康,徐立慰(广东工业大学,广东广州 510090)摘 要:与不可控整流的交-直-交变频调速系统相比,双PWM 变频调速系统采用可控PWM 整流技术,提高了变频调速性能.介绍了基于TI 公司DSP 芯片TM S320L F2407的双PWM 变频调速系统的设计方法,给出了基于TMS320L F2407的设计框图和软件流程图,对外围器件的选取也做了扼要介绍,并对双PWM 变频调速的应用和发展趋势做了展望.关键词:双PWM ;整流;逆变;数字信号处理(DSP )中图分类号:TM921.5 文献标识码:A 变频调速以其优异的启动制动性能、高效节能、高功率因数、广泛的适用范围等优点而被认为是最有发展前途的调速方式,并有取代直流调速的趋势.根据不同场合对控制精度的要求不同,可以采用不同的控制电路和控制技术.但无论采用哪种控制策略,都存在电磁干扰(Elect ro Magnet ic Inter 2f ere nce 2EMI )和谐波污染的电力公害,以及谐波电流大、功率因数低、直流回路需要大的储能电容、再生能量不能回馈电网等问题[1],新型变频器应努力克服这些问题.1 双PWM 变频器的工作原理双PWM 变频器是在交-直-交控制系统中,将整流部分用可控开关管取代整流二极管,逆变部分不变,即整流和逆变均采用P WM.设计中所用的开关管均采用IG B T 作为功率开关元件.双PWM 变频调速系统具有以下特点[1]:可实现电网侧输入功率因数近似为1,消除了谐波污染;可实现电动机的四象限运行;能量转换效率高,能量可双向流动.其主电路拓扑结构如图1所示.双PWM 控制电路的主电路与一般的交-直-图1 双PWM 变频调速的主电路拓扑结构Fig.1 Main configuration of dual 2P WM variable 2f requency speed regulation system交控制系统的不同之处是,交-直部分可控.在系统结构上,三相整流器和三相逆变器均采用PWM 调制技术,功率开关器件IG B T 始终处于开通或关断工作状态,使整流器三相输入电流接近正弦波,谐波成分非常小即交流输入侧的电流与电压同相位,从而解决了整流器由于输入电流畸变而引起的功率因数下降的问题,实现了功率因数近似为1.功率开关器件IG B T 与二极管反并联,使PWM 整流部分不仅能工作在整流状态,而且能逆运行,实现能量双向流动.当P WM 整流部分从电网吸取电能时,工作在整流状态;而当PWM 整流部分向电网传输电能时,工作在有源逆变状态.所谓单位功率因8:200-04-21:197-.数是指:当PWM整流部分工作于整流状态时,其网侧电压、电流同相;当PWM整流部分工作在有源逆变状态时,其网侧电压、电流反相[2].2 双PWM变频器的硬件设计双PWM变频器的核心控制元件采用美国德州仪器(TI)公司生产的TMS320L F2407DS P芯片[3].该芯片不仅具有普通信号处理器的高速运算功能,而且还有丰富的片内外设,如通用定时器、脉宽调制PWM电路、捕捉器、光电编码器接口、A/D转换器、串行通信接口、看门狗等,这些片内外设为DSP应用于电动机控制提供了方便.尤其是它具有两个事件管理器,共12路P WM输出,正好用于控制双PWM变频系统的12个开关管.六单元IG B T功率开关元件选用富士公司生产的6MB P20R H060智能功率模块[4](IPM).该模块是先进的混合集成功率器件,由高速低功耗的I G2 B T芯片、优选的门极驱动及保护电路构成.与其他功率模块相比,IPM可以使系统的硬件电路简单、可靠性高及缩短系统的开发时间.IPM将IG B T所需的外围电路都集成到模块内,所以它与DSP的连接非常简单.由于IPM对驱动电压和信号干扰的要求严格,为防止IPM损坏和误动作,因此DSP与IPM之间不能有直接的电气连接,可以采用美国安捷伦公司专为IPM等功率器件设计的高速光电耦合器HCPL4504作为输入信号的隔离器件.对于故障信号输出可用一般的光电耦合器,如PC817或TPL521作为隔离器件.2.1 PWM整流部分的设计为提高功率因数和使能量可双向流动,采用可实现功率因数校正的控制电路.目前,普遍采用的控制方式是以电压反馈作外环,以电流反馈作内环的双闭环串级结构,其中电压反馈信号用于控制整流器的输出电压,电流内环则实现整流器网侧单位功率因数控制[2].图2是基于TMS320L F2407的高功率因数整流器的结构图.分别将由电流传感器和电压传感器采样来的模拟量限压后送入TMS320L F2407的A/ D口,在TMS320L F2407中编程,实现三相静止坐标系变换到两相旋转坐标系及I调节器的功能,减小了使用模拟器件所带来的偏差和温漂,提高了系统的可靠性六路WM控制信号来自图2 基于TMS320LF2407的高功率因数整流器 Fig.2 High po wer factor PWM r ectifier ba sed onTMS320L F2407TMS320L F2407的事件管理器A,由TMS320L F2407的P WM1~PWM6(对应的I/O口为IOPA6,IOPA7,IOPB0,IOPB1,IO PB2和IOPB3)输出.2.2 PW M逆变部分的设计双PWM变频调速系统的逆变部分即电动机控制部分与普通电动机的控制模式基本相同,是采用磁场定向电压空间矢量(SV PWM)的控制方式,即将三相坐标系转换为两相坐标系,使交流电动机近似于直流电动机来进行控制.其特点是易于得到参考量和易于实现直接转矩控制[5].图3为基于TMS320L F2407的PWM电动机控制结构,它与整流部分共用一块TMS320L F2407.两相电流的测量值经Clarke变换后得到α和β轴系的量,经Par k变换后,输出量与设定的参考值相比较,经P I调节后再经Park逆变换,得出的量就可以用来产生SV PWM的控制信号.采用SV PWM控制便于信号的数字化处理,具有转矩脉动小,噪音低,电压利用率高的优点.坐标变换、数字P I调节器及SV PWM的产生均在TMS320L F2407内实现,具有快速和可靠性高的特点.六路PWM控制信号来自TMS320L F2407中的事件管理器B,由TMS3L F的WM~WM输出(对应的I O口为IO~IO6)输出信号需经高速光电耦合器隔离后再输入I M203广 东 有 色 金 属 学 报 20068P.P202407P7 P12/PE1P E.P.图3 基于TM S320L F2407的磁场定向控制结构图Fig.3 Control con f iguration of magnetic field orienta2 tion based on TMS320LF24073 双PWM变频器的软件设计从硬件设计部分可以看出,基于TMS320L F2407的双P WM变频调速系统只需用于采集模拟量的电流传感器、电压传感器、光电编码器以及工作电源等少量的外部器件,控制系统的大部分功能均可在TMS320LF2407内实现,因此可以实现系统的全数字化控制.软件设计对于整个系统来说是比较重要的部分,其涵盖了DSP的初始化设计、防积分饱和的数字PI调节器设计、A/D转换器的采样、光电编码器的采样和计算、Clar ke变换、Park变换及其逆变换、SV PWM的区间判别和定时器时间确定、各相关量的计算等.限于篇幅,这里仅仅给出高功率因数整流器和磁场定向的PWM逆变控制软件流程图,如图4所示.其中图4(a)为PWM 整流控制部分的程序流程图,图4(b)为P WM逆变控制部分的程序流程图.4 结论双PWM变频调速装置具有高功率因数及低谐波污染,尤其是能量的双向流动特性,非常适宜在位势负载,如电梯等设备上使用虽然其控制系统略显复杂,但采用高性能DS可以实现系统的大部分功能.随着电力电子技术、电动机变频控制技术和计算机控制技术的成熟,其应用前景会越来越广泛.(a)PWM整流控制部分程序流程图(a)Soft war e flow diagram of PWM rectif ier(b)PWM逆变控制部分程序流程图(b)Sof twa re f low dia gra m of P WM inver te r图 双WM变频器控制软件流程图F S f f f2WM2f2 q y y303第16卷 第4期 邱 涛,等:基于DSP的双PWM变频调速系统的设计8.P4Pig.4o tw are lo w diag ram o d ual P variable reu enc sp eed reg ulatio n s stem参考文献:[1]陈国呈.PWM 变频调速及软开关电力变换技术[M ].北京:机械工业出版社,2001.[2]张崇巍,张兴.PWM 整流器及其控制[M ].北京:机械工业出版社,2003.[3]何苏勤,王忠勇.TMS320C2000系列DSP 原理及应用[M ].北京:电子工业出版社,2003.[4]富士公司.IG B T 2IPM 应用手册[E B/OL ].[2006203220].http ://www.sc ut .maindoc/techtrade/f uji/document s/tec hsuppo rt/RC H983/RC H983.pdf.[5]李华德.交流调速控制系统[M ].北京:电子工业出版社,2003.A dual 2P WM v ar ia ble 2f r equency speed regulation system ba sed on DSPQIU Tao ,CH EN Lin 2kang ,XU Li 2wei(Guangdong U ni versit y of technology ,Gua ngzhou 510090,China )Abstract :Compare d to t he uncont rollabl e AC 2DC 2AC in t he conventional VF spee d regulat ion ,dual 2PWM V F speed regulat io n syst em adopt s cont roll able PWM rect ifier t echnology to i mp rove capabilit y.The de 2si gn of dual 2PWM VF speed regul ation which i nt roduced i n t his paper i s based on TI TMS320LF2407DSP.The paper off ers t he design chart and soft ware flow chart of t he syste m based on TMS320L F2407and i n 2t roduces so me apparat us which must be used i n t he design.And t hi s paper bri ngs forwar d t he po ssibl e ap 2plications and develop ment t rend of t he dual 2PWM VF speed regul ation techni ques.K ey w or ds :dual 2PWM ;rect ifier ;i nver sion ;di gi tal signal processi ng (DSP)403广 东 有 色 金 属 学 报 20068。
基于LV8726的步进电机高精度驱动系统设计
压、调频调压、恒流斩波及细分驱动ꎮ 根据步进电机驱动电路输出 PWM 的类型ꎬ可
以得到三角波、梯形波、拟正弦波三种电机绕组电流 波形[10 - 13] ꎮ 其中ꎬ三角波和梯形波的细分驱动效果 不够理想:绕组电流切换不够平滑ꎬ细分步距角不均 匀ꎬ电机输出力矩不稳定ꎬ容易产生抖动等问题ꎮ
IA = Im∗(sin θ) / (sin β)
(1)
IB = Im∗(cosθ - ctg β∗sinθ)
(2)
其中ꎬIA和 IB分别为电机两个绕组 A、B 中的细分电
流ꎬIm为电机绕组的额定电流ꎬθ 是 A 相磁场矢量与
两相合成磁场矢量之间的夹角ꎬβ 为相邻两相绕组
0 引言
两相混合式步进电机作为一种使用频繁、能够 将脉冲信号转换成角位移的数字设备的终端执行机 构[1 -2] ꎬ结合了反应式和永磁式步进电机的优点ꎬ具 有输出力矩大ꎬ整步运行步距角小ꎬ无累积运行误差 等优点ꎮ
步进电机正常转动时的角位移及转速分别与外 部输入脉冲的个数和频率成正比ꎬ转向则取决于电 机绕组的通电顺序ꎮ 对于给定型号的电机ꎬ其运转 性能主要受驱动电路控制策略影响[3 -5] ꎬ因此ꎬ为了
Design of high precision driving system for stepper motor based on LV8726
WANG Gao ̄gao1 ꎬ WANG Wei ̄wei2
(1. Fengtai county power supply companyꎬ Anhui Electric Power Co. ꎬ Ltd. ꎬ State Gridꎬ Huainan 232100ꎬ Anhui Provinceꎬ Chinaꎻ
DRV8825电机驱动芯片
电力电子・ Power Electronics62 •电子技术与软件工程 Electronic Technology & Software Engineering步进电机是将电脉冲信号转变为角位移或线位移的开环控制元,可以分别通过控制脉冲个数和频率,从而达到准确定位和调速的目的,在机电一体化产品中有着广泛的应用。
设计中常用的步进电机又有单极型(unipolar) 和双极型 (bipolar) 之分。
相对而言,单极型电机虽然应用效率较低,但是驱动电路简单,在早些年有较大的成本优势,特别是在高电压、大电流的应用中。
不过近年来,随着各大厂家双极型电机专用驱动芯片的大量推出,在性能不断提高的同时,价格也在不断下降,再综合了其占用 PCB 空间小,控制简单等优点,采用双极型电机及专用驱动芯片取代单极性电机已经成为了一种趋势。
本文将介绍一种双极型电机专用控制芯片DRV8825,并提供一个基于该芯片的打印机电机驱动电路设计方案。
1 芯片介绍DRV8825是德州仪器 (TI) 为打印机、扫描仪和其他自动化设备设计的集成电机驱动芯片。
它集成了 2 个 H 桥电路,以及片上 1/32 微步进分度器,可以驱动一个双极型电机,或两个直流有刷电机。
输入电压范围 8.2~45V, 可以提供 1.75A 的有效电流,并可承受 2.5A的峰值电流(在 24 V、 25° C 的应用环境下 )。
低至 0.2Ω的导通电阻,保证了芯片良好的热特性。
另外,还集成了快速响应的短路、过热、欠压及交叉传导保护功能电路,能够检测故障状况,并迅速切断 H 桥,从而为电机和驱动芯片提供保护。
功能模块框图:关键引脚功能说明:nENBL: 输入,使能,低有效,带内部下拉。
高电平时,关闭芯片所有输出和操作。
nSLEEP : 输入,低电平时进入低功耗休眠模式,带内部下拉。
STEP: 输入,上升沿触发一步,带内部下拉。
DIR: 输入,设置步进方向,带内部下拉。