自动加料机控制系统
基于PLC自动加料机控制系统设计
- 22 -高 新 技 术0 前言在进行玻璃的制造和生产过程中,基于PLC 控制系统设计的自动化加料机能够高效、准确地完成玻璃运输,省去了大量人力物力,节约了生产成本。
该文就是基于PLC 控制系统来设计一款玻璃自动加料机。
1 系统方案制定在对其进行设计的过程中,我们需要考虑7个方面:1)研究自动加料机的工作原理和工艺要求。
2)确定I/O 点数。
依据我们所得到的具体的控制要求和工艺条件,确定所需要的输入设备和输出设备以及对应的按钮数量等。
3)根据I/O 点数来进一步选择较为合适的PLC 类型。
4)分配I/O 点,对PLC 的输入输出点进行合理分配,并绘制出一个分配表。
5)设计出对应的自动供料系统的梯形图程序,这一步是核心工序。
6)把PLC 程序进行一次模拟运行,找到程序中存在的错误和误差,并对其进行修改,加以完善。
7)PLC 软、硬件在完成最终的设计后,需要对其进行联机调试,该过程中一旦发现任何问题要及时解决,直到最终成功。
基于以上设计思路,制定了以下系统设计方案,需要根据S7-200供料系统的基本原理来设计PLC 控制系统,查阅有关PLC 控制系统的文献和资料,分析其软件和硬件的设置要求,对PLC 控制系统进行编程、调试和操作。
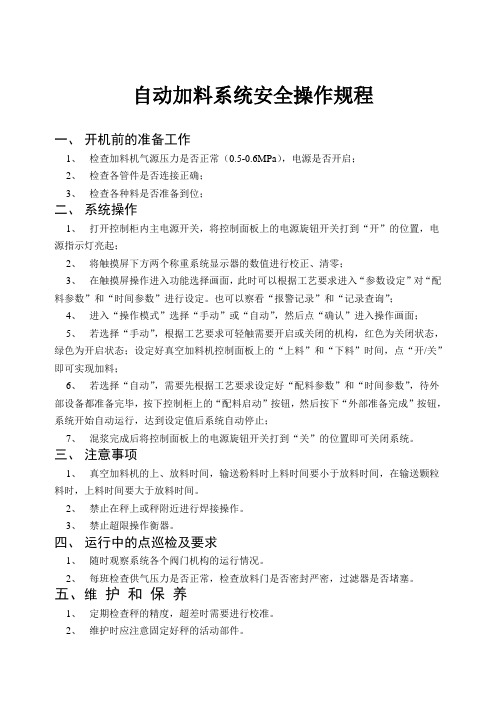
系统内有3个三相交流异步电机,分别是传送带电机M 3,额定功率4 000 W,额定电压380 V,额定电流10 A。
出料电机M 4,额定功率4 000 W,额定电压380 V,额定电流10 A ;开闸电机M 1,额定功率2 000 W,额定电压380 V,对应的额定电流是5 A。
在按下了电动机上的启动按钮之后需要接通传送带电机M 3,让输送带带动开始运转,向秤斗中进行进料。
把称斗中所含有的原料设置到对应的重量后,进行S 3动作,M 3接受到感应就会停止工作,不再将原料输送过来,利用出料电机M 4和开闸电动机M 1就会将传送带上的原料运输过去,此时对应的斗秤闸门会打开并把物料运输到下面的传送带中去。
【精品】自动加料机控制系统资料
目录第一章绪论 ............................................. 错误!未指定书签。
1.1题目来源及课题意义 .............................. 错误!未指定书签。
1。
2自动加料机控制系统的工作原理及技术要求 (1)1.3系统的主要技术参数: (1)第二章方案论证 ......................................... 错误!未指定书签。
2。
1单片机的选择 ................................... 错误!未指定书签。
2.2物位传感器的选择 ................................ 错误!未指定书签。
2。
3存储器扩展电路的选择 (5)2。
4LED显示电路选择 (7)2。
5.键盘输入电路 (8)第三章自动加料机主电路 ................................. 错误!未指定书签。
3.1系统结构原理图 .................................. 错误!未指定书签。
3。
2主机电路核心器件介绍 (10)3.3显示电路 ........................................ 错误!未指定书签。
3。
4继电器控制电路 ................................. 错误!未指定书签。
3。
5键盘及显示电路 ................................. 错误!未指定书签。
3.6外部存储器扩展电路 .............................. 错误!未指定书签。
3.7看门狗MAX813L电路 .............................. 错误!未指定书签。
3。
8料位开关 ....................................... 错误!未指定书签。
自动加料系统安全操作规程
自动加料系统安全操作规程一、开机前的准备工作1、检查加料机气源压力是否正常(0.5-0.6MPa),电源是否开启;2、检查各管件是否连接正确;3、检查各种料是否准备到位;二、系统操作1、打开控制柜内主电源开关,将控制面板上的电源旋钮开关打到“开”的位置,电源指示灯亮起;2、将触摸屏下方两个称重系统显示器的数值进行校正、清零;3、在触摸屏操作进入功能选择画面,此时可以根据工艺要求进入“参数设定”对“配料参数”和“时间参数”进行设定。
也可以察看“报警记录”和“记录查询”;4、进入“操作模式”选择“手动”或“自动”,然后点“确认”进入操作画面;5、若选择“手动”,根据工艺要求可轻触需要开启或关闭的机构,红色为关闭状态,绿色为开启状态;设定好真空加料机控制面板上的“上料”和“下料”时间,点“开/关”即可实现加料;6、若选择“自动”,需要先根据工艺要求设定好“配料参数”和“时间参数”,待外部设备都准备完毕,按下控制柜上的“配料启动”按钮,然后按下“外部准备完成”按钮,系统开始自动运行,达到设定值后系统自动停止;7、混浆完成后将控制面板上的电源旋钮开关打到“关”的位置即可关闭系统。
三、注意事项1、真空加料机的上、放料时间,输送粉料时上料时间要小于放料时间,在输送颗粒料时,上料时间要大于放料时间。
2、禁止在秤上或秤附近进行焊接操作。
3、禁止超限操作衡器。
四、运行中的点巡检及要求1、随时观察系统各个阀门机构的运行情况。
2、每班检查供气压力是否正常,检查放料门是否密封严密,过滤器是否堵塞。
五、维护和保养1、定期检查秤的精度,超差时需要进行校准。
2、维护时应注意固定好秤的活动部件。
3、混浆完成后需要对真空上料机进行清洗。
基于PLC的自动加料机控制系统

1 工艺 要 求
自动加料机 的机械 系统共设 计 了 3台电机 , 别实现 横 向运 动 、 分 翻转运动 和纵 向运 动 。横 向运动 实现 向
炉 内加料 , 翻转 运动 实现倒料 , 向运动实 现工位 的移 动 。此 系统共 设 了 l 纵 O个工 位 , 其运 行 的 全过 程 是 : 在
Hale Waihona Puke Co r l n y t m fAu o a i e e nt o l g S se o t m tc Fe d r i
Ba e n PLC sd o
Z A e ja ,I a 一 n Z A i i H O W n- u n L U H i ,H O L —l
横 向 回退电机 回退至原 位 , 测炉 内料液面 的高低 , 高 , 系统 回归至原 点 , 检 若 则 若低 , 向电机 向前 移动 1个 纵
工位 , 再循环 一次横 向 向炉 内送料 的运动 , 就是说 , 向 电机 每 向前 移动 1个工位 , 也 纵 都要重 复一 次 向炉 中送
料的运动 , 至重 复完最后 一个工 位 的送料 运动后 , 向 电机 直接 回到起始位 置 , 测料仓 内料 够 否 , 直 纵 检 检测 料 液面 的高低 , 然后再 重复下 一个加料 周期 。根据 加料 系统 的工 艺要求 , 绘制工 艺流程 见 图 1 。
个横 向运动的循环, 横向运动过 程如上所述。当横 向运动 的一个循环结束后 , 向进给至第 3个 工位 , 纵 即 X2 , 1 处 再重复纵向运动 , 再纵向进给 , 直至第 l O个工位 X 3 , 2 处 当再一次的横向循环结束后 , 向回退至上 纵
限 Xl 。此时 , 0处 一个纵 向循环 就结束 了。 223 炉 内料液 面检测 系统 。启动 加料 系统最 基本 的一 个 条件 就是 炉 内料 液 面 降低 了。 为 了把 炉 内料 液 .. 面的高低 和加 料系统 联系起来 , 我们 在 炉 内的上升道 处加 装 了一 个液 面检 测仪 , 把液 面检 测仪 输 出 的电信 号
基于PLC的自动加料机控制系统_毕业设计

焦作大学毕业设计题目:基于PLC的自动加料机控制系统摘要在现代科学技术的许多领域中,自动控制技术起这愈来愈重要的作用,并且,随着生产和科学技术的发展,自动化水平也越来越高。
自动控制利用控制装置使被控对象的某个参数自动的按照预定的规律运行。
本次设计在本着节约资金、降低成本,提高生产效率,人机操作的简便性,保障人身安全的科学人性化管理的方针下对加料机机构进行自动化设计。
利用可编程控制器PLC来控制自动加料,本文以PLC程序控制的自动加料设备的控制的程序。
自动加料系统具有操作简单、加料均匀、自动化程度高等优点,因此,一些有实力采用全电熔的玻璃生产厂家已经开始使用自动加料设备。
此设计本着节约资金、降低成本,提高生产效率,人机操作的简便性,保障人身安全的情况下对加料机机构进行自动化设计。
设计出更加适合于工作环境的加料机构。
此设计中自动加料机控制体系是采用以PLC为核心,结合触摸屏等辅助设备对PLC的控制这样的一套自动化设备来实现的,这样就可以在不购买新设备的基础上对旧设备进行自动化改良,这不仅大大提高了工作的效率和经济效应,也提高了产品的质量,方便了管理好设备,让公司管理体系更加完善,减少了人力物力。
文中阐述了基于PLC的自动加料机控制系统的结构,并分别介绍了PLC的结构和技术特点、自动加料机的工艺技术要求、触摸屏界面设计、硬件的选择、PLC模块I/O端口的分配、PLC原理图、程序结构、主电气图和系统的功能及保护。
关键词:PLC;自动加料机;I/O端口分配;变频器;触摸屏;程序结构;目录第一章绪论 (5)1.1题目的来源及课题的意义 (5)1.2 设计背景和研究意义 (5)1.3 自动加料机控制系统的技术要求 (6)第二章可编程控制器基础 (8)2.1 PLC的定义 (8)2.2 PLC的分类 (8)2.3 PLC的基本组成及各部分的作用 (10)2.4 PLC的特点 (14)2.5 PLC的应用 (14)2.6 PLC的发展 (15)2.7 PLC程序的表达方式 (17)2.8 PLC的通信联网 (18)2.9 PLC系统的其它设备 (19)第三章系统硬件设计 (19)3.1 PLC的选择 (19)3.2 电动机的选择 (23)3.3 自动加料机的选择 (27)3.4 变频器的选择 (28)3.5 气缸的选择 (31)3.6 触摸屏的选择 (34)3.7 触摸屏界面的设计 (36)第四章系统软件设计 (38)4.1 工作流程图及主电路的接线图 (38)4.2 PLC模块I/O端口分配 (31)4.3 系统程序设计 (43)结语 (51)致谢 (51)参考文献 (52)第一章绪论1.1题目的来源及课题的意义在现代科学技术的许多领域中,自动控制技术起这愈来愈重要的作用,并且,随着生产和科学技术的发展,自动化水平也越来越高。
自动加料机操作说明

自动加料系统使用说明一、概述本系统采用西门子S7-200PLC作为主控制器,西门子高精度伺服驱动器和伺服电机控制加料机前后和左右的精确定位,西门子彩色触摸屏作为人机界面,操作简单,变频器控制下料量。
二、操作说明1.手动操作:将手动/自动开关旋到手动位置,按下手动启动按钮,手动指示灯亮,这时进入手动工作模式。
控制杆可以控制加料机前后左右运动,但前后左右向不能超过行程开关,向左和向后不能超过参考点光电开关。
按下手动下料按钮,皮带运转。
按下手动壁震按钮,震动启动。
2.自动操作:自动操作需要先进行原点搜索。
可以手动搜索或是自动搜索。
手动搜索方法是:将手动/自动开关旋到手动位置,按下手动启动按钮,手动指示灯亮,这时进入手动工作模式。
将加料机向后运行到前后参考点光电开关处,再向左运行到左右参考点接近开关处;进入原点搜索界面,观察前后参考点和左右参考点都是绿色,按原点确定按钮,原点确定指示变为绿色,原点搜索完成。
自动搜索方法是:将手动/自动开关旋到自动位置,进入原点搜索界面,按原点搜索按钮,加料机自动向后和向左运行到参考点位置,按确定按钮,原点确定指示变为绿色,原点搜索完成。
如果参考点失效,加料机运行到了前后左右的限位开关处则报警停机。
在主画面上按启动按钮,系统逐步自动工作。
按停止按钮,系统执行完当前步停止。
如果按急停按钮,系统立即停机,但下次启动时需要重新进行原点搜索。
主画面中显示总步数、当前步数、当前脉冲数(当前步需要走的脉冲数)、下料点R(左右运动电机主轴到下料点的距离)、方向(当前运行步的方向)。
自动工作过程中,自动加料机受炉内液位的控制,当液位高于设定也为时,系统自动停止,当液位低于设定下限时,系统自动启动。
三、参数设置电机每转脉冲数:固定值2000。
手动左右速度:手动操作时的左右电机转速。
手动前后速度:手动操作时的前后电机转速。
原点搜索左右速度:原点搜索时的左右电机转速。
原点搜索前后速度:原点搜索时的前后电机转速。
基于单片机控制的自动加料系统设计
目录第一章绪论 (1)1.1 题目来源及课题意义 (1)1.2 自动加料机控制系统的工作原理及技术要求 (1)1.3 系统的主要技术参数: (1)第二章方案论证 (2)2.1 单片机的选择 (2)2.2 物位传感器的选择 (3)2.3 存储器扩展电路的选择 (5)2.4 LED显示电路选择 (7)2.5.键盘输入电路 (8)第三章自动加料机主电路 (10)3.1 系统结构原理图 (10)3.2 主机电路核心器件介绍 (10)3.3 显示电路 (18)3.4 继电器控制电路 (22)3.5 键盘及显示电路 (23)3.6 外部存储器扩展电路 (27)3.7 看门狗MAX813L电路 (30)3.8 料位开关 (32)第四章系统的抗干扰及可靠性 (35)第五章软件设计 (36)第六章结论语 (38)参考文献: (39)附录A:系统框图 (40)附录B:系统硬件框图 (40)程序清单: (42)第一章绪论1.1 题目来源及课题意义在现代科学技术的许多领域中,自动控制技术起这愈来愈重要的作用,并且,随着生产和科学技术的发展,自动化水平也越来越高。
自动控制利用控制装置使被控对象的某个参数自动的按照预定的规律运行。
本设计的自动加料机控制系统就是采用自动控制技术来实现功能的,这样就大大提高了工作的效率,整个过程又快又稳。
1.2 自动加料机控制系统的工作原理及技术要求本设计的由单片机控制的自动加料系统是与料斗式干燥机配套的加料系统。
根据加料工艺要求,其工作原理是:先将真空管关闭,启动电机,用低真空气流将塑料树脂粒子送入真空管,电机停转,再将粒子排入料斗,如此循环。
在设计的控制系统中,可用一个电机控制两个加料生产线,由方向阀切换。
两个生产线既可单独运行,也可同时运行。
假如两者同时运行,当一生产线输送结束后,判断到另一个生产线排料已经结束,那么,电机不停转而方向阀换向,从而为另一个生产线送料。
这样可以发挥控制系统和电机的效率,从而实现供料自动化。
基于的自动加料机控制系统设计 (修改)
4
4
系统设计要点
1. 安全可靠
系统设计时应充分考虑安全性和可靠性,采取相应的防 护措施和故障应对策略,确保系统的稳定运行和生产安 全
4
系统设计要点
2. 易于维护与扩展
系统设计应便于维护和扩展,方便对系统 的升级改造和功能扩展。同时,应充分考 虑系统的可维护性,便于日常维护和保养
4
系统设计要点
ห้องสมุดไป่ตู้ -
-
1 引言 3 系统功能 5 总结
2 系统构成
4
系统设计要点
1
1
引言
随着工业自动化程度的 提高,可编程逻辑控制 器(PLC)在工业控制领 域的应用越来越广泛
自动加料机作为生产线 上的重要设备,其控制 系统的设计对于生产效 率和产品质量具有重要 意义
基于PLC的自动加料机 控制系统设计,可以实 现精确控制、自动化操 作,提高生产效率,降 低人工成本
为企业的生产管理提供有力支持
-
-
T感H谢A聆NK听S
2
2
系统构成
1. PLC控制器
PLC是自动加料机控 制系统的核心,主要 完成逻辑控制、数据 处理、运动控制等功 能。PLC控制器选用 时应根据控制需求和 系统规模进行选型, 以确保系统的稳定性 和可靠性
2
系统构成
2. 输入输出模块
输入输出模块是PLC与外部设备 之间的桥梁,负责接收和发送 信号。根据实际需求,选择适 当的输入输出模块,以满足对 信号的采集和控制要求
3
系统功能
3. 数据采集与 处理
系统能够实时采集物 料的重量、位置等信 息,并进行数据处理 和分析。通过数据反 馈,优化加料机的控 制策略,提高生产效 率和产品质量
基于PLC自动加料机控制系统设计
题目:基于PLC自动加料机控制系统设计摘要:本设计方案是一种自动上底料系统,主要用于解决当前热电厂所采用的人工上底料的方式带来的各种问题。
设备投入运行之后,可以直接解决热电厂需要人工上底料的问题,减少了底料运输过程中物料所产生的飞尘,在提高工作效率的同时,对于保护周围环境和工人的身体健康都是十分有利的。
本文在对需求进行分析的基础上,进行了输送设备的选型,结合可编程控制器与继电器技术实现了上料过程的全自动控制,并对可编程控制系统的原理进行了介绍和分析。
关键词:热电厂循环流化床锅炉自动化PLC 变频器目录1、引言 (3)1、自动化控制概述 (3)1.1、自动化控制的研究内容 (3)1.2、自动化控制的研究现状 (4)1.3、自动化控制的发展趋势 (4)2、自动上底料系统的设计方案 (4)2.1、需求分析 (4)2.2、系统机械本体设计方案 (5)2.3、控制系统设计方案 (7)3、底料输送设备选型 (9)3.1、MS250埋式刮板上料机 (10)3.2、TH250斗式提升机 (11)3.3、LS250螺旋给料机 (13)4、系统硬件设计 (14)4.1、PLC 选型 (14)4.2、变频器选型 (14)4.3、I/O 分配 (15)4.4、外部接线图 (15)4.5、设备顺序启停程序设计 (17)4.5.1、顺序控制过程 (17)4.5.2、流程图设计 (17)4.5.3、梯形图设计 (18)结论 (23)致谢 (23)参考文献 (24)附录 (25)1 引言循环流化床锅炉是燃煤型锅炉的一种,它具备其他老式的燃煤型锅炉所没有的优点。
基于鼓泡床沸腾锅炉的原理,逐渐开发了循环流化床锅炉。
这种炉子在国外发展很快。
单炉蒸发速率从65T / h提高到550T / h以上。
目前我国有很多可以生产循环流化床锅炉的厂家,这些锅炉的蒸发量在35T/h至220T/h之间,其中已经投入运行的是高压中温锅炉,这种锅炉的单台蒸发量超过了75t/h。
毕业设计--基于单片机控制的送料机自动送料机控制系统设计[管理资料]
第1章绪 论
设计背景和研究意义
制造业是现代文明的支柱之一,其既占有基础地位,有处于前沿关键;它是工业发展光的主体又是国民经济持续发展的基础。而在我国的乡镇企业、私营企业,由于受资金管理等方面的限制,一般送料绝大多数是采用人工手动送料,且缺乏保护装置,这造成“效率低,劳动强度大,事故发生率大”等特点。
综上所述,在本着节约资金、降低成本,提高生产效率,保障人身安全的科学人性化管理的方针下对送料机构进行自动化设计。此设计中自动加料机控制系统就是采用以单片机为核心的自动控制技术来实现功能的,这样就可以在不购买新设备的基础上对旧设备进行自动化改良,这不仅大大提高了工作的效率,使整个过程又快又稳又节约资金。
随着信息科技迅猛、市场经济的发展,国内、国际市场竞争日益激烈,产品更新更为迅速,尤其是随着高新科技日新月异,产品的类型、工艺外形越来越复杂,精度要求越来越高,再加上企业经营与发展必会面对劳工的短缺 、 人工成本上要省力化、合理化与自动化的发展趋向!传统的手工送料已经不能满足要求,这时自动送料机就应运而生。在今天现代科学技术的许多领域中,什么是送料机呢?顾名思义,送料机就是专门用于粒料,粉料,片状料,带状等材料的自动化,数控化,精确化的输送机器,是无论是轻工行业还是重工业都不可缺少的设备。传统观念,送料机是借助于机器运动的作用力加力于材料,对材料进行运动运输的机器。近代的送料料机发生了一些变化,开始将高压空气、超声波等先进技术用于送料技术中。
In these papers the structure composition and working principle of automatic feed machine based on single chip microcomputer are introduced in these papers,to realize its industrial process control’s hardware and software design method byis a system control center.SCM is based on doing things with the2864Aextended memory to store the system's initial data,mainly to the system settings to an appropriate initial state, when there are system procedures disorder, it can return to the initial state; Using the extended parallel interface to the external control buttons, in order to receive operation commands,and in order for workers to understand the state of the button, give the system access to light-emitting diode to display the status of the corresponding keys; With LED display to display a static amount of working time changes;For making LED digital information and microcontroller output information corresponding, connection decoders MC14511B between them; In order to determine the production line of full and timely material status, design a material interruption of the circuit over the same time as the anti-interference,Interference will be full of materials for the opto-isolated signal;designing a watchdog circuit for the system in order to make the system stable, and prevent disordering procedures;For the system to resolve the various peripherals and the microcontroller AT89C51 varying speed conditions, indirecting in both the latch; Finally installed an internal clock oscillator in the system.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目 录第一章 绪 论 (1)1.1 题目来源及课题意义 (1)1.2 自动加料机控制系统的工作原理及技术要求 (1)1.3 系统的主要技术参数: (1)第二章 方案论证 (2)2.1 单片机的选择 (2)2.2 物位传感器的选择 (3)2.3 存储器扩展电路的选择 (5)2.4 LED 显示电路选择 (7)2.5. 键盘输入电路 (8)第三章 自动加料机主电路 (10)3.1 系统结构原理图 (10)3.2 主机电路核心器件介绍 (10)3.3 显示电路 (18)3.4 继电器控制电路 (22)3.5 键盘及显示电路 (23)3.6 外部存储器扩展电路 (27)3.7 看门狗MAX813L 电路 (30)3.8 料位开关 (32)第四章 系统的抗干扰及可靠性 (35)第五章 软件设计 (36)第六章 结论语 (38)参考文献: (39)附录A:系统框图 (40)附录B:系统硬件框图 (40)程序清单: (42)电子园w w w .c e p a r k .c o m第一章 绪 论1.1 题目来源及课题意义在现代科学技术的许多领域中,自动控制技术起这愈来愈重要的作用,并且,随着生产和科学技术的发展,自动化水平也越来越高。
自动控制利用控制装置使被控对象的某个参数自动的按照预定的规律运行。
本设计的自动加料机控制系统就是采用自动控制技术来实现功能的,这样就大大提高了工作的效率,整个过程又快又稳。
1.2 自动加料机控制系统的工作原理及技术要求 本设计的由单片机控制的自动加料系统是与料斗式干燥机配套的加料系统。
根据加料工艺要求,其工作原理是:先将真空管关闭,启动电机,用低真空气流将塑料树脂粒子送入真空管,电机停转,再将粒子排入料斗,如此循环。
在设计的控制系统中,可用一个电机控制两个加料生产线,由方向阀切换。
两个生产线既可单独运行,也可同时运行。
假如两者同时运行,当一生产线输送结束后,判断到另一个生产线排料已经结束,那么,电机不停转而方向阀换向,从而为另一个生产线送料。
这样可以发挥控制系统和电机的效率,从而实现供料自动化。
控制系统的控制器有单片机89C51和扩展电路组成,单片机控制继电器,继电器控制交流接触器,又由接触器控制电机等执行机构的运动。
本控制系统可以根据送料工艺的需要,设置两条生产线的输送、排料、满料、空料等参数值,也可装载系统前次工艺参数值。
1.3 系统的主要技术参数:(1) 用一台电机控制两条生产线(2) 要能检测到满料状态,并显示出输送、排料、满料时间(3) 时间误差:0.1秒(4) 具有抗干扰能力电子园w w w .c e p a r k .c o m第二章 方案论证2.1 单片机的选择20世纪80年代以来,单片机的发展非常迅速,就通用单片机而言,世界上一些著名的计算机厂家已投放市场的产品就有50多个系列,数百个品种。
目前世界上较为著名的8位单片机的生产厂家和主要机型如下:美国Intel 公司:MCS—51系列及其增强型系列美国Motorola 公司:6801系列和6805系列美国Atmel 公司:89C51等单片机美国Zilog 公司:Z8系列及SUPER8美国Fairchild 公司:F8系列和3870系列美国Rockwell 公司:6500/1系列 美国TI (德克萨司仪器仪表)公司:TMS7000系列 NS (美国国家半导体)公司:NS8070系列 等等。
尽管单片机的品种很多,但是在我国使用最多的还是Intel 公司的MCS—51系列单片机和美国Atmel 公司的89C51单片机MCS—51系列单片机包括三个基本型8031、8051、87518031内部包括一个8位CPU 、128个字节RAM ,21个特殊功能寄存器(SFR )、4个8位并行I/O 口、1个全双工串行口、2个16位定时器/计数器,但片内无程序存储器,需外扩EPROM 芯片。
比较麻烦,不予采用8051是在8031的基础上,片内集成有4K ROM ,作为程序存储器,是一个程序不超过4K 字节的小系统。
ROM 内的程序是公司制作芯片时,代为用户烧制的,出厂的8051都是含有特殊用途的单片机。
所以8051适合与应用在程序已定,且批量大的单片机产品中。
也不予采用。
8751是在8031基础上,增加了4K 字节的EPROM ,它构成了一个程序小于4KB 的小系统。
用户可以将程序固化在EPROM 中,可以反复修改程序。
但其价格相对8031较贵。
8031外扩一片4KB EPROM 的就相当与8751,它的最大优点是价格低。
随着大规模集成电路技术的不断发展,能装入片内的外围接口电路也可以是大规模的。
也不予采用。
AT89C51是美国ATMEL 公司生产的低电压,高性能CMOS 8位单片机,片内含4K bytes 的可反复擦写的只读程序存储器(PEROM)和128bytes 的随机存取数据存储器电子园w w w .c e p a r k .c o m(ROM),器件采用ATMEL 公司的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器(CPU)和Flash 存储单元。
功能强大AT89C51单片机可提供许多高性价比的应用场合,可灵活应用于各种控制领域。
此设计就采用AT89C51。
2.2 物位传感器的选择物位是指贮存容器或工业生产设备里的液体、粉粒壮固体、气体之间的分界面位置,也可以是互不相溶的两种液体间由于密度不等而形成的界面位置。
根据具体用途分为液位、料位、界位传感器或变送器。
物位不仅是物料耗量或产量计量的参数,也是保证连续生产和设备安全的重要参数。
特别是在现代工业中,生产规模大,速度高,且常有高温、高压、强腐蚀性或易燃易爆物料,对于物位的监视和自动控制更是至关重要。
物位测量可用于计算物料储量。
对于粉粒体,必须考虑到颗粒间有空隙,应区分密度和容重。
密度是指不含空隙的物料每单位体积的质量,即通常的质量密度ρ,如果乘以重力加速度g ,就成为重力密度r ,简称为重度。
容重是包含空隙在内的每单位体积的重量γv ,也就是视在重度或宏观重度,它总要比颗粒物质本身的重度小,其差额决定于空隙率。
而空隙率又取决与许多因素。
例如颗粒形状、尺寸的一致程度、是否受外力压实、是否经受过振动、有无黏结性等,所以粉粒体物料的体积储量和质量储量之间不易精确换算,这是需要注意的。
2.2.1 电容式物位传感器利用物料介电常数恒定时极间电容正比与物位的原理,可构成电容式物位传感器。
根据电机的结构可将容式物位传感器分为三中:(1)适用与导电容器中的绝缘性物料,且容器为立式圆筒形,器壁为一极,沿轴线插入金属棒为另一极,其间构成的电容C 与物位成比例。
也可悬挂带重锤的软导线作为电机。
(2)适用与非金属容器,或虽为金属容器但非立式圆筒形,物料为绝缘性的。
这时在棒壮电极周围用绝缘支架套装金属筒,筒上下开口,或整体上均匀分布多个孔,使内外物位相同。
中央圆棒和与之同轴的套筒构成两个电极,其间电容和容器形状无关,只取决于物位。
所以这种电极只用于液位,粉粒体容易滞留在极间。
(3)用于导电性物料,起外形和(1)一样,但中央圆棒电极上包有绝缘材料,电容是由绝缘材料的介电常数和物位决定的,与物料的介电常数无关,导电物料使筒壁与中央电极间的距离缩短为绝缘层的厚度,物位升降相当于电极面积改变。
电容式物位传感器无可动部件,与物料密度无关,但应注意物料中含水分时将对电子园w w w .c e p a r k .c o m测量结果影响很大,并且要求物料的介电常数与空气介电常数差别大,需用高频电路。
所以不予采用。
2.2.2 阻力式料位传感器阻力式料位传感器是指物料对机械运动所呈现的阻挡力。
粉末颗粒状物料比液态物质流动性差,对运动物体有明显的阻力,利用这一特点可构成各种料位传感器。
(1)重锤探索法:在容器顶部安装由脉冲分配器控制的步进电机,此电机正转时缓缓释放悬有重锤的钢索。
重锤下降到与料面接触后,钢索受到的合力突然减小,促使力传感器发出脉冲。
此脉冲改变门电路的状态,使步进电机改变转向重锤提升,同时开始脉冲计数。
待重锤升至顶部触及行程开关,步进电机停止转动,同时计数器也停止计数并显示料位(料位值即容器全高减去重锤行程之差)。
显示值一直保持到下次探索后刷新为另一值。
开始探索的触发信号可由定时电路周期性地供给,也可以人为地启动。
不进行探索时,重锤保持在容器顶部,以免物料将重锤淹埋。
万一重锤被物位埋没,排放物料时产生的强大拉力就可能拉断钢索报警措施及出料过滤栅。
但这种方法运用了逻辑电路和数字技术,可连续测量料位值并输出数字量,是数字传感器,但其采样是周期性的,对时间而言不连续,此设计不予采用。
(2)旋桨或推板法:这是一种位式传感器,或称料位开关。
在容器壁的某一高度处装小功率电动机,其轴伸入容器内,末端带有桨状叶片。
叶片不接触物料时,自由旋转的空载状态下电动机的电流很小,一旦料位上升到与叶片接触,转动阻力增加,甚至成堵转状态,电流显著加大。
根据电流的大小使继电器的接点动作,发出料位报警或位式控制信号。
如电机轴经过曲柄连杆机构变为往复运动,则可带动活塞或平板在容器中做推拉动作,即成推板法。
旋桨法或推板法不一定都是靠电机电流的大小时继电器接点动作,也可以利用离合器或连杆上的传动机构,在叶片或推板负载增大时改变电接点的通断状态。
所用电动机应能在长时间堵转状态下,或离合器打滑状态下,不致过热而损坏。
这类原理构成的料位开关,只能安装在容器壁上,安装高度取决于动作所对应的料位值。
应用不那么广泛,所以次设计也不予采用。
(3)音叉法:根据物料对振动中的音叉有无阻力探知料位是否到达或超过某高度,并发出通断信号,这种原理不需要大幅度的机械运动,驱动功率小,机械结构简单、灵敏而可靠。
音叉由弹性良好的金属制成,本身具有确定的固有频率,如外加交变力的频率与其固有频率一致,则叉体处于共振状态。
由于周围空气对振动的阻尼微弱,金属内部的能量损耗又很少,所以只需微小的驱动功率就能维持较强的振动。
当粉粒体物料触及叉体之后,能量消耗在物料颗粒间的摩擦上,迫使振幅急剧衰减,音叉停振。
为了给音叉提供交变的驱动力,利用放大电路对压电元件施加交变电场,靠逆压电效应产生机械力作用在叉体上。
用另外一组压电元件的正压电效应检测振动,它把电子园w w w .c e p a r k .c o m振动力 为微弱的交变电信号。
再由电子放大器和移相电路,把检振元件的信号放大。
经过移相,施加到驱动元件上去,构成闭环振荡器。
在这个闭环中,既有机械能也有电能,叉体是其中的一个环节,倘若受到物料阻尼难以振动,正反馈的幅值和相位都将明显的改变,破坏了振荡条件,就会停振。
只要在放大电路的输出端接以适当的器件,不难得到开关信号。