一种新型的动态模糊神经网络算法
模糊神经网络的设计与训练
模糊神经网络的设计与训练模糊神经网络(Fuzzy Neural Network, FNN)是一种结合了模糊逻辑和神经网络的智能计算模型。
其设计与训练方法的研究一直是人工智能领域的热点之一。
本文将从FNN的基本原理、设计方法、训练算法以及应用领域等方面进行深入探讨。
首先,我们来了解一下FNN的基本原理。
FNN是通过将模糊逻辑和神经网络相结合,利用神经网络的学习能力和模糊逻辑的推理能力来解决复杂问题。
与传统的神经网络相比,FNN在处理不确定性问题时具有更好的性能。
在设计FNN时,首先需要确定输入变量和输出变量,并通过隶属函数将其映射到隶属度空间中。
隶属函数描述了输入变量或输出变量与隶属度之间的关系,常用的隶属函数有高斯函数、三角函数等。
然后,需要确定规则库,规则库中包含了一系列IF-THEN规则,描述了输入变量与输出变量之间的映射关系。
接下来是关于FNN训练算法方面的探讨。
常见的FNN训练算法有梯度下降法、遗传算法、模糊聚类算法等。
梯度下降法是一种基于误差反向传播的训练算法,通过不断调整权重和阈值来最小化误差函数。
遗传算法是一种模拟自然选择和遗传机制的优化算法,通过不断迭代进化来搜索最优解。
模糊聚类算法是一种基于模糊理论的聚类方法,通过迭代计算样本与聚类中心之间的隶属度来确定样本的分类。
FNN在许多领域都有广泛的应用。
在控制领域中,FNN可以应用于自动控制系统、智能机器人等方面。
在图像处理领域中,FNN可以应用于图像分类、目标识别等方面。
在金融领域中,FNN可以应用于股票预测、风险评估等方面。
然而,尽管FNN具有诸多优点和广泛的应用前景,但也存在一些挑战和问题需要解决。
首先是选择合适的隶属函数和规则库结构,在设计FNN时需要根据具体问题进行合理选择,并进行参数调整和优化。
其次是训练过程中容易陷入局部最优解的问题,需要采用合适的训练算法来避免。
此外,FNN的解释性和可解释性也是一个需要关注的问题,如何将FNN的结果以可理解和可信任的方式呈现给用户是一个挑战。
基于BP算法的模糊神经网络控制系统的仿真实现

基于BP算法的模糊神经网络控制系统的仿真实现随着计算机和控制技术的不断发展,控制系统的设计也越来越受到关注。
基于BP算法的模糊神经网络控制系统是一种新型的控制方法,可以有效解决传统控制方法难以解决的问题。
在本篇文章中,我们将介绍基于BP算法的模糊神经网络控制系统的仿真实现。
1. BP算法简介BP算法是一种常见的人工神经网络训练算法,它是一种迭代算法,通过不断调整权值来实现网络的训练。
BP算法的基本思想是利用梯度下降求出网络误差函数的最小值。
在模糊神经网络中,BP算法可以用于训练输入输出关系的映射。
通过训练可以得到网络的权值和阈值,使得网络能够更好地拟合输入输出映射。
2. 模糊神经网络控制系统模糊神经网络控制系统是一种强大的控制方法,它将模糊控制和神经网络控制相结合,能够有效地处理模糊性问题和非线性问题。
模糊神经网络控制系统将模糊控制器和神经网络控制器相结合,用模糊控制器处理模糊性问题,用神经网络控制器处理非线性问题。
3. 仿真实现在仿真实现中,我们以飞行控制系统为例,设计了一个基于BP算法的模糊神经网络控制系统,该系统包含一个模糊控制器和一个BP神经网络控制器。
模糊控制器将输入的误差和误差变化率转化为模糊量,然后根据模糊规则得到输出控制量。
BP神经网络控制器通过训练得到输入输出映射,进而对输出控制量进行优化。
我们通过MATLAB软件进行仿真,将仿真结果与经典控制方法进行对比,发现基于BP算法的模糊神经网络控制系统具有更好的控制性能和更强的鲁棒性。
在控制飞行器的姿态过程中,基于BP算法的模糊神经网络控制系统具有更快的响应速度和更小的稳态误差。
4. 总结基于BP算法的模糊神经网络控制系统是一种强大的控制方法,能够有效地解决传统控制方法难以解决的问题。
在仿真实现中,我们设计了一个基于BP算法的模糊神经网络控制系统,得到了良好的控制效果,这也表明了该方法的可行性和优越性。
在实际应用中,我们需要对系统进行优化和调试,以达到更好的控制效果。
DFKCN:一种动态模糊自组织神经网络及其应用
中 圈分类号:T1 P8
D KC F N:一种 动 态模糊 自组 织神 经 网络及其应 用
耿新青 ,王正 欧
(.鞍山师范学院数学系,鞍山 14 0 ;天津大学系统 工程研 究所 ,天津 3 0 7 ) 1 10 5 0 0 2
摘
要:提 出了一种新 的动态模糊 自组织神经 网络模型( F C ) D K N ,并将其 用于文本聚类 中。将 D K N模型应用到中文文本聚 类中,该文 F C
a dIs n g . ANG e g u Xi q n “ W Zh n o
( . ah maisDe at n, s a r l iest, s a 0 5 1 M te t p rme tAn h nNoma v ri An h n l4 0 ; c Un y 1
然而 F C K N的结构是固定的 ,输出神经元的个数等于聚 类 的个数 ,而聚类的个数在文本聚类中通常是未 知的。为 了
维普资讯
第3 2卷 第 2 期 0
、_ . ,1 o 32
・
计
算
机
工
程
20 0 6年 l 0月
Oc ob r 0 6 t e 2 0
№
2 o
Co put rEng ne r ng m e i ei
博士 论文 ・
文章编号: 0o 48o6o一02 3 文献 1o 2( o)_ l —0 H—3 2 2 2 标识码:A
条矩阵 D,m 表示文本集 中的文本数 ,q表示文本集中包含
的所有不 同的词条 个数 , 每一个不 同的词对应于矩阵 D的一 行 ,而每一个文档对应于 矩阵 D的一列 ,D表示为
D =【 。 d × ( 1 )
一种模糊神经网络的结构和参数的确定方法

在 构建 F N( uz erlN tok 模 糊 神经 网络 ) N F z N ua e r , y w “ 时, 由于事先不知道模糊规则数 , 而使网络结 构无法确定 , 一般 的方法是考 虑覆 盖所有 可能 规则来 构造神经 网络的结 构。 由 于规则 的冗余性 和不 精简性 , 当前件语言变量个数及每个语言 变 量划 分的模糊 子集 比较多 时 , 将导 致神 经 网络结 构非 常复 杂 J 。采用 F P F z r a io , G ( uz G dPrt n 模糊 网格 划分 ) 可 得 y i t i 到精简 的规则数 , 但模糊 网格划分在对语言变量进行模糊划分
m l s g G te b e r ie es u tr e rl e ok T e autdte e rl e okb a kP p g t n l u s n F a r e u i P, r y t m n r c e o n ua n t r . h na js ua n t r yB c . r a a o h e d e h t t u f w e h n w o i ( P l r m, Otep a t f uz e rl e okw r e r ie .Fn l ,ti m to a u e o s u t e B )a oi g t h S a me r o zy n ua n t r e d t m n d i l h s e d w s sdt c n t c t h r e s f w e e ay h o r h
n gF z r ati ( G )wd uz erl e ok( N .Fr f m sm l dt w ol ee i eot i uz G dP rt n F P i1 zyN ua N t rs F N) it,r a pe a n y i io F w s o a, ecu dtr n t pi d m eh ・
一种粒子群-Mamdani 模糊神经网络的参数优化新算法

( F N N)w e r e g e n e r a t e d b y F u z z y C — I n e a n s c l u s t e r i n g , b a s e d o n P S O, a n d t h e n o p t i m i z e d b y u s i n g P S O .
Abs t r a c t :I n o r de r t o a v o i d l o c a l o p t i mu m o f Ma mda n i mo d e l pa r a me t e r o pt i mi z a t i o n,a n o v e l a l g o r i t hm f o r Ma md a n i n e ur a l n e t wo r k wa s p r o p o s e d . Th e i n i t i a l pa r a me t e r s o f Ma md a n i Fu z z y Ne u r a l Ne t wo r k
一
种粒子群- Ma md a n i 模 糊 神 经 网 络 的参 数 优 化 新 算 法
姚 蕾
( 广东工业大学 应用数学学 院 , 广东 广州 5 1 5 0 0 0 )
摘要 : 为了避 免 Ma m d a n i 模型参数优化易 陷入局部最优 , 提 出了构造 Ma m d a n i 模糊 神经网络的新算法. 该算 法用 基 于粒子群算法 的模糊 聚类确 定 Ma m d a n i 模糊 神经 网络的初 始参数 , 然后 用 P S O算法对前件参数 和后件参数进行优 化. 最 后用梯度下降法对参数进一步寻优 , 从而实现模糊规则的 自动调整 、 修改和完善 . 实验结 果证 明, 该方法提 高
模糊神经网络的研究及其应用
模糊神经网络的研究及其应用模糊神经网络是一种结合了模糊逻辑和神经网络的先进技术,它在许多领域中都得到了广泛的应用。
在本文中,我们将介绍模糊神经网络的基本概念、特点、理论研究以及实际应用,最后对未来发展进行展望。
模糊神经网络是一种基于模糊逻辑理论的多层前馈网络,它通过模拟人脑神经元的连接方式来实现分类和识别等功能。
与传统的神经网络相比,模糊神经网络具有以下特点:模糊化输入:将输入数据转换为模糊量,使网络能够更好地处理不确定性和非线性问题。
采用模糊规则:模糊神经网络采用模糊规则进行计算,这些规则可以很好地描述现实世界中的模糊现象。
双重迭代:模糊神经网络需要进行模式识别和参数优化双重迭代过程,以实现网络性能的优化。
模糊神经网络在许多领域中都得到了广泛的应用,以下是其中的几个典型例子:图像处理:模糊神经网络可以应用于图像分类、图像增强、图像恢复等方面,提高图像处理的效果和速度。
语音识别:模糊神经网络可以应用于语音信号的特征提取和分类,提高语音识别的准确率和鲁棒性。
自然语言处理:模糊神经网络可以应用于文本分类、情感分析、机器翻译等方面,提高自然语言处理的效果和效率。
控制领域:模糊神经网络可以应用于系统建模、控制优化等方面,提高控制系统的稳定性和鲁棒性。
模糊神经网络的理论研究主要集中在以下几个方面:模糊逻辑的研究:模糊逻辑是模糊神经网络的基础,因此对模糊逻辑的研究是十分必要的。
主要研究内容包括模糊集合、模糊关系、模糊推理等方面的研究。
神经网络的研究:神经网络是模糊神经网络的核心,因此对神经网络的研究也是十分必要的。
主要研究内容包括神经元的数学模型、神经网络的训练算法、神经网络的稳定性等方面的研究。
模糊神经网络的建模和优化:模糊神经网络的建模和优化是提高其性能的关键。
主要研究内容包括网络结构的选取、参数的优化、训练算法的设计等方面的研究。
模糊神经网络在实际应用中已经取得了显著的成果,以下是其中的几个例子:电力系统的负荷预测:通过建立基于模糊神经网络的负荷预测模型,可以对电力系统的负荷进行准确预测,提高电力系统的稳定性和安全性。
动态模糊神经网络研究

5θij
=
- δ2ij -
2(
xi
+
O
2 ij
(
k
-
1)θij σ2ij
cij)
O
2 ij
(
k
-
1)
(14)
最后可得出参数调整的学习算法为 (其中 ,β> 0 为
学习率)
w ij ( k
+ 1)
=
w ij ( k)
-
β5E 5 w ij
,
i = 1 ,2 , …, r ; j = 1 ,2 , …, m
比较慢 ,通过结合 BP 算法可克服此不足 。具体方
法为先用遗传算法对初始参数进行优化 , 找到准最
优解 ,再用 BP 算法加快最后的收敛速度 。
此动态模糊神经网络中 , 若其模糊分割数是确
定的 , 则需要学习的参数为最后一层的权值 w ij 、第 二层隶属函数的中心 cij 和宽度σij 以及递归连接权 值θij 。定义目标函数
动态神经网络的研究已取得了一定的进展 ,其 中有反馈型神经网络 ,如 Hopfield 网络 、双向联想存 储器 BAM 和 Boltzmann 机 ,动态递归神经网络 ,包 括广义递归神经网络 、Elman 网络及局部递归网络 等 。这些方法都是设法使网络具有记忆功能 ,因而 能够处理与时间有关的对象 。
图 2 DFNN 仿真结果 Fig. 2 Simulation result of DFNN
图 3 FNN 仿真结果 Fig. 3 Simulation result of FNN
4 k
5
O
3 j
=
r
m
∑ ∑ δ4j
u4i -
基于广义动态模糊神经网络的光伏电池MPPT控制概要

第38卷第13期电力系统保护与控制 Vol.38 No.13 2010年7月1日 Power System Protection and Control Jul. 1, 2010基于广义动态模糊神经网络的光伏电池MPPT控制杨旭,曾成碧,陈宾(四川大学电气信息学院,四川成都 610065)摘要:依照最大功率点跟踪(MPPT)的原理,在综合考虑各种不同的控制方法优缺点的基础上,提出了一种新的基于椭圆基的广义动态模糊神经网络(GD-FNN)的光伏电池的智能控制方法。
通过GD-FNN算法调节PWM的占空比来控制光伏电池的输出电压,实现阻抗匹配,达到能量的最优化。
仿真结果表明,这种控制方法能够有效地跟踪到电池的最大功率,并且具有较好的稳定性。
关键词:光伏电池;MPPT;椭圆基;广义动态模糊神经网络;智能控制MPPT control of photovoltaic cells based on generalized dynamic fuzzy neural network YANG Xu,ZENG Cheng-bi,CHEN Bin(College of Electrical and Engineering, Sichuan University,Chengdu 610065,China)Abstract:Considering a variety of advantages and disadvantages of different control methods,this paper proposes a new ellipse-based generalized dynamic fuzzy neural network(GD-FNN)intelligent control method of photovoltaic cells based on the principle of the maximum power point tracking(MPPT). By controlling the output voltage of photovoltaic cells by means of regulating the duty cycle of PWM based on GD-FNN algorithm,it can achieve impedance matching and energy optimization.The simulation results show that this control method can effectively follow-up the maximum power of the battery,what’s more,it has good stability.Key words:photovoltaic cells;maximum power point tracking(MPPT);ellipse-based;GD-FNN;intelligent control 中图分类号: TP273 文献标识码:A 文章编号: 1674-3415(2010)13-0022-040 引言智能电网是近年来国际上备受关注的未来电力系统发展方向的热门话题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘
要 : 为了解决模糊系统中的 知识抽 取问题 和避免 初值 选择的 任意 性 , 提出 一种 新型
的动态模糊神经网络算法 。 运用规则产生准则时 , 考虑输出误差和可容纳 边界的有 效半径这 2 个重要因素 ; 通过分级学习法 , 大大提高学习的有效性 , 加之参数的调整只限于线性参数 , 没 有迭代学习 , 因而学习速度很快 , 这使算法应用于实时学习成为可能 ; 非线性参数是由训练样 本和启发式方法直接决定的 。 利用 D - FNN 来进行 M ackey- G lass 混沌时 间序列预测 实验 。 仿 真结果表明 D - FNN 算法的有效性和实用性 。 关 键 词 : 动态模糊神经网络 ; 模糊逻辑 ; 神经网络 ; 系统预测 中图分类号 : TP 391 文献标识码 : A
( 12 )
dm in > kd ( 13 ) 则要考虑增加一条新的模糊规则, 否则, 观测数据 X i 可以由现有的最近的 RBF 单元表示。这里, kd 是 可容纳边界的有效半径。 º 分级学习 思想 分 级学习主 要思想是 每个 RBF单元的可容纳边界不是固定的而是根据如下的 方式动态地调节的。 起初 , 可容纳的边界设置较大 , 以实现全局学 习, 随着不断学习, 边界逐渐减小, 开始局部学习, 根据这个思想, 提出了一种简单的方法, 即基于单 调递减函数, 逐渐减少每个 RBF 单元的有效半径和 [ 9] 误差指数 。 也就是说, 式 ( 10)和式 ( 13)中的 k e, kd 不是常 数, 而由下列式子确定: i k e = m ax [ em ax @ B, em in ] ( 14) 式中 , em ax 为预先定义好的最大误差; em in为期望的 D-FNN 精度; B( 0< B< 1)为收敛常数。 i kd = m ax [ dm ax @ C , dm in ] ( 15) 式中 , dm ax为输入空间的最大长度; dm in为所关心的 最小长度; C( 0< C < 1) 为衰减常数。 分级学习的关键思想是首先确定产生输出误差 大而没有被现有模糊规则覆盖的位置, 这个阶段也 称为粗学习, 当 ke, kd 分别达到 em in和 dm in时, 这个 阶段的学习就称为细学习 。 » 提前分配参数 当一条模糊规则产生后 , 要 解决的问题就是如何确定它的参数。 仿真结果显示, RBF 单元的宽度对系统的泛化 性能至关重要。如果这个宽度小于邻近输入的距离 (即 RBF 单元没有重叠 ), 模糊神经网络的泛化能力 就很差, D-FNN 将不能对未知的输入给出有用的输 [ 11] 出 。但是, 如果宽度太 大, 则 RBF 单元 容易饱 合, 即无论输入是多少, 它的输出都将会很大 ( 接近 1 . 0) 。因此, 新产生的规则的初始参数按照如下方 式分配: Ci = Xi ( 16 ) Ri = k @ dm in ( 17) 式中 , k ( k > 1)是重叠因子。
r
由式 ( 2) 可以看到, 该层的每个节点即代表了 一个 RBF 单元。此时模糊规则数等同一个 RBF 节 [ 4] 点数 。 第 4 层 称为归一化 层, 称这些节点为 N 节 点。显然, N 节点数与模糊规则节点数相等。第 j 个节点 N j 的输出为 W , 2 , ,, u ) j = <j / E <k , ( j = 1
[ 7]
k
#W k
( 4)
式中, y 为变量的输出 ; w k 为 TH EN部分或者第 k 个规则的连接权。 对于 T SK 模型: w k = ak 0 + ak 1 x 1 + , + akrx r, ( k = 1, 2 , ,, u ) ( 5) 当结果参数是实常数时: w k = ak, ( k = 1 , 2 , ,, u ) 这就是 S 模型。 ( 6)
把式 ( 2) , 式 ( 3) , 式 ( 5) 及式 ( 6 ) 分 别代入 式 ( 4) , 则分别得到 : TSK 模型 : y (X ) =
E
u
[ ( a i0 + a i1 x 1 + , + air x r ) @
i= 1
# 466#
控
制
工
程
第 16 卷
dm in = argm in ( di ( j ) ) 如果 :
E
2Leabharlann r( x i - cij ) / Rj ] = exp[ - + X 2 2
i= 1
C j + /R j ] , ( j = 1 , 2 , ,, u )
r
( 2)
式中, X = [ x 1, x 2, ,, x r ] I R ; C j = [ c1j, c2j, ,, crj ] I R 是第 j 个 RBF 单元的中心。
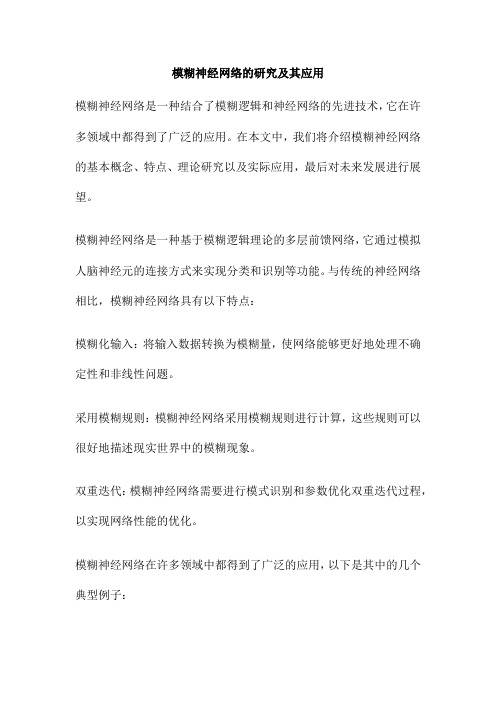
1) D-FNN 的结构 本文所研究的动态模糊神 经网络的结构 , 如图 1 所示。
图 1 D-FNN 的结构 F ig1 1 D-FNN struc ture
图中, x 1, x 2, ,, x r 是 输入 的语 言变 量; y 是系统的输出; M Fij 是第 i 个输入变 量的第 j 个 隶 属函数 ; R j 表示第 j 条模糊规则; N j 是第 j 个归一 化节点 ; w j 是第 j 个规则的结果参数或者连接权 ,
2 0 09年 7月 第 16 卷第 4 期
文章编号 : 1671 -7848( 2009) 04-0464-04
控 制 工 程 Contro l Eng in eering o f China
Ju l. 2 0 0 9 Vo.l 16 , No . 4
一种新型的动态模糊神经网络算法
张德丰, 卢清华, 周 燕
k=1 u
( 3)
第 5 层 称为输出层, 该层中的每个节点分别 表示一个输 出变量, 该输 出是所有输 入信号的 叠 加: y (X ) =
Ew
k= 1
u
上面的模糊神经网络等同于一个扩展的 RBF 神 经网络。与一个标准的 RBF 神经网络相比 , 所谓 / 扩 展的 RBF 神经网络 0这个术语是指: ¹ 具有超过 3 层 的网络结构; º 未考虑偏置量 ; » 权值可以是输入的 [ 5] 函数而不是实常数 。 2) D-FNN 的学习算法 图 1可知, 第 3 层的每 个节点代表模糊规则的 IF-部分或者 RBF 单元。如果 需要辨识模糊规则数 , 就不能预先选择 D-FNN 的结 构。因此必须对 D-FNN 提出一种新的学习算法, 该 算法能自动地确定模糊规则并能达到系统的特定性 [ 6] 能 。 ¹ 规则产生准则 显然 , 如果规则数太少 , 系统 将不能完全包含输入-输出状态空间。 D-FNN 的性能 将表现得很差。另一方面 , 如果规则数太多, 不仅增 加系统不必要的复杂性, 而且将极大地增加计算负担 并导致 D-FNN 泛化能力变差。因此, 输出误差是确 定新规则是否应该加入的重要因素。 误差判断 可以描述如下: 对于第 i 个观测 数据 (X i, ti ), 其中, X i 是输入向量, ti 是期望的输出, 根据 式 ( 7 )计算 D-FNN 现有结构的全部输出 y i。 定义: + ei + = + ti - y i + ( 9) 如果: + ei + > ke ( 10 ) 则要考虑增加一条新的规则。这里的 k e 值是根据 DFNN 期望的精度预先选定的 。 从高斯函数角度来看, 一个高斯函数具有良好 的局部特性, 因为其输出随着与中心距离的增加而 单调递减。当输入变量的隶属函数采用高斯函数描 述时, 即说整个输入空间由一系列的高斯函数所划 分的。如果一个新的样本位于某个存在的高斯函数 覆盖范围或称为可容纳边界内, 则该新样本可以用 存在的高斯函数代表, 而无须 D-FNN 产生新的高斯 [ 8] 单元 。 可容纳边界判据的描述如下。 对于第 i 个观测数据 ( X i, ti ) 计算输入值 X i 和现有 RBF单元的中心 Cj 之间的距离 di ( j ), 即: d i ( j) = +X i - Cj +, ( j = 1 , 2 , ,, u ) ( 11 ) 式中, u 是现有的模糊规则或者 RBF单元的数量。 找出:
第 4期
张德丰等 : 一种新型的动态模糊神经网络算法
2 u
# 465#
2
u 指系统总的规则数。 [ 2] 下面, 对该网络各层的含义做详细的描述 。 第 1 层 称为输入层, 每个节点分别表示一个 输入的语言变量。 第 2 层 称为隶属函数层, 每个节点分别代表 一个隶属函数, 该隶属函数用如下高斯函数表示: 2 2 Lij (x i ) = exp ( - (x i - cij ) /Rj ), ( i= 1 , 2 , ,, r), ( j = 1 , 2 , ,u ) ( 1) 式中, L cij 是 x i 的第 j 个 ij 是 x i 的第 j 个隶属函数; 高斯隶属函数的中心 ; Rj 是 x i 的第 j 个高斯隶属函 数的宽度; r 是输入变量数; u 是隶属函数的数量 , [ 3] 也代表系统总的规则数 。 第 3 层 称为 T范数层 , 每个节点分别代表一 个可能的模糊规则中的 I F部分。因此 , 该层节点 数反映了模糊规则数。 第 j 个规则 R j 的输出为 <j = exp[ 2
Abstrac t :
In o rder to solve the know ledge extraction proble m in fuzzy sy stem and avo id the starting va lue cho ice haphazardness . A dy -
na m ic fuzzy neural network ( D-FNN ), a lgor ithm is proposed. W hen the cr iterion o f rule generation is used, the ou tput error and the effective rad ius o f the m ay -ho ld boundary are considered , as two i m po rtant factors . By using the g raduation study strategy s ' app lication, the study va lid ity is greatly enhanced . In addition the param eter adjust m ent is on ly restricted in the linea r para m ete r , w ithout itera ted the study . T hus the study speed is very qu ick. It is poss ible tha t the a lgor ithm is applied in to the real ti m e study . The no linear para me ter is directly dec ided by the training sa m ple and the heur istic m ethod . TheM ackey -G lass chaos ti m e se ries forecast exper i m ent using DFNN is done . T he si m u lation result show s the effectiveness and practicab ility . K ey word s : D-FNN; fuzzy log ic ; neura l netwo rk; sy stem prediction