(完整版)曲柄连杆机构运动学仿真
曲柄滑块机构运动仿真DOC
湖南农业大学工学院课程设计说明书课程名称:题目名称:班级:20 级专业班姓名:学号:指导教师:评定成绩:教师评语:指导老师签名:20 年月日曲柄滑块结构运动仿真一、概述二、各零件的创建1.曲柄·设置工作目录·创建曲轴的文档·选择好以毫米为单位点击工具栏的→→选择FRONT平面为草绘平面,RIGHT面为参考平面,进入草绘状态。
利用拉伸,选择一个拉伸面为草绘平面,以TOP面为参考平面,进入草绘状态→在第二次拉伸的中间位置创建一个平面平行于RIGHT平面为DTM1,利用镜像工具,将第二次拉伸的部分以DTM1镜像,得到利用拉伸和旋转创建出轴的其他部位如图利用创建平面工具,利用图示位置关系创建出一平面DTM2利用拉伸,以DTM2为草绘平面,创建键槽特征利用倒角选择倒角边和数据再利用倒圆角,选择倒圆角半径和需要倒圆角的边点击保存完成曲轴的创建。
2.连杆以及其他零件利用如曲轴的步骤,创建连杆和其他零件,如下只做出零件完成图连杆上部分连杆下盖活塞上盖底座三、零件的装配·设置工作目录·创建活塞的文档·选择好以毫米为单位进入装配界面后,点击装配将工作目录中的“di”文件放置到界面中,选择接下来逐一装配工作目录中其他零件,装配结果如下图点击应用程序中→机构进入运动仿真界面四、运动仿真点击右边工具栏定义伺服电动机选择如图所示轴定义如下点击确定后,进入运动分析选择分析类型点击运行后,机构将进行运动分析利用回放将运动过程制成运动图片接着利用测量进行分析五、整体爆炸视图。
基于ProE的发动机曲柄连杆机构运动仿真
[3] 詹友刚.Pro/ENGINEER 2001 教程[M].北京:清华大 学出版社,2003.
[4] 和 青 芳,徐 征 .Pro/ENGINEER Wildfire 产 品 设 计 与 机 构 动 力 学 分 析 [ M ] .北 京 : 机 械 工 业 出 版 社 , 2004.
[5] 张伯艳.MatLab 在科学和工程计算中的应用[J].电 脑学习,2001,(1):25-27.
Kinematical Simulation of Slider-Crank Mechanism of Engine Based on Pro/E
ZHAO Ming-yu, GAO Yu-zhi
Time/s
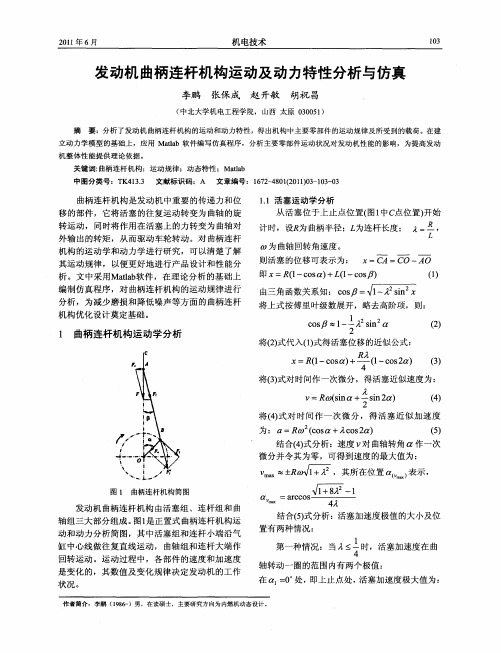
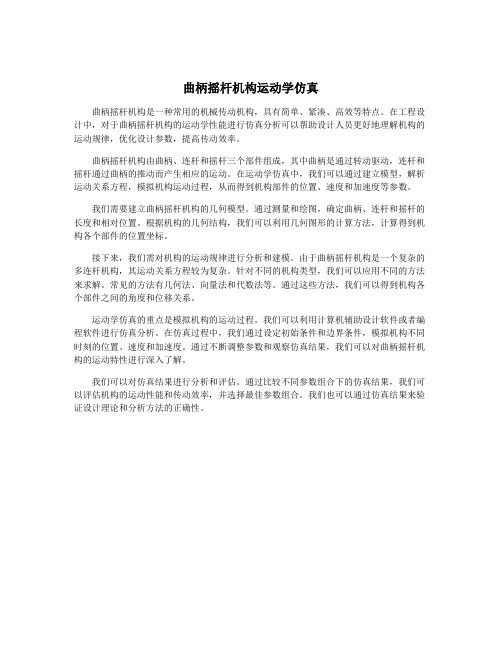
图 3 活塞随时间变化的位移曲线
232.8187957
Analysis Definition1::measure1/mm
221222..88118877995577
202.8187957
192.8187957
182.8187957
117622..88118877995577 1 52.8187957 0 2 4 6 8 10 12
收稿日期 作者简介
2004-08-15 赵明宇 1968- ,男 yahoo.com.cn
讲师
(E-mail)zhaomy00000@
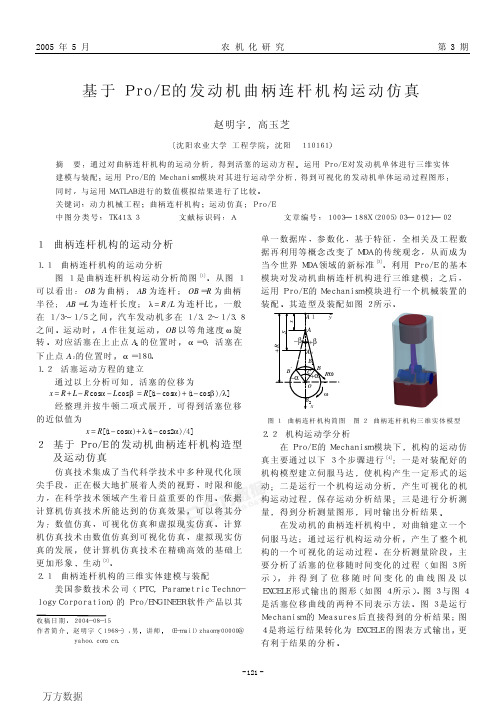
Mechanism 的 Measures 后直接得到的分析结果 图 4 是将运行结果转化为 EXCELE 的图表方式输出 更 有利于结果的分析
发动机曲柄连杆机构运动及动力特性分析与仿真
第 一种情 况 : 当
时,活 塞加速 度在 曲
4
轴转 动 一 圈的范 围 内有两 个 极值 : 在 , 0 处 , = 。 即上 止 点处 , 塞加速 度 极大 值为 : 活
作 者简 介 :李鹏 (9 6 )男 ,在 读硕 士 ,主要 研 究方 向 为内燃 机动 态 设计 。 18 -
( 5 )
结 合() 分析 :速度 1对 曲轴 转角 作一 次 4式 ,
Va≈+ c /+ 2,其所在位置 ( 表 示 , x Ro 1 2 x v) m
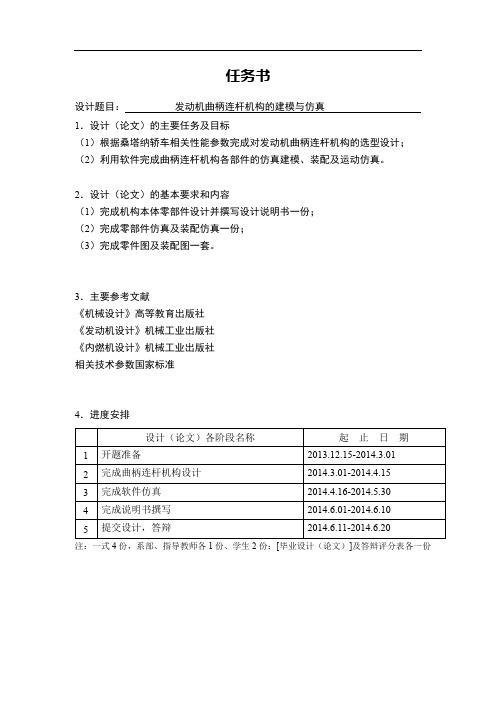
图 1 曲柄 连 杆 机 构 简 图
、 .
x = a ccos— r
/+—2 — 8 —1 1 2
—
发 动机 曲柄连 杆 机 构 由活塞 组 、连 杆 组和 曲 轴 组三 大 部分 组成 。 1 图 是正 置式 曲柄 连杆 机构 运
机 电技术
21 年 6 01 月
a =R o(+2 c 1 )
Байду номын сангаас
() 6
,
一
( ) +
() 8
在 ,=10 处 ,即下 止 点处 ,活塞 加速度 极 小值 8。
1 连杆 运 动学分 析 . 2
为:a, R o (一 =一 c 1 )
1
() 7
= ・ D () 9
速度 近似 式代 入 ,可 得 曲柄连 杆机 构 的往 复惯 性
力为:
= m, c ( S ̄ cs a - R o C O+2 o 2 ) O
一
4
结合 () 分析 :活 塞加 速度 极值 的大 小及 位 5式 置有 两 种情 况 :
1
动和动力分析简图,其 中活塞组和连杆小端沿气 缸 中心 线 做往 复 直线 运 动 , 曲轴组 和连 杆 大端 作 回转运 动 。运 动 过程 中 ,各 部 件 的速度 和 加速 度
发动机曲柄连杆机构的建模与仿真【毕业作品】
任务书设计题目:发动机曲柄连杆机构的建模与仿真1.设计(论文)的主要任务及目标(1)根据桑塔纳轿车相关性能参数完成对发动机曲柄连杆机构的选型设计;(2)利用软件完成曲柄连杆机构各部件的仿真建模、装配及运动仿真。
2.设计(论文)的基本要求和内容(1)完成机构本体零部件设计并撰写设计说明书一份;(2)完成零部件仿真及装配仿真一份;(3)完成零件图及装配图一套。
3.主要参考文献《机械设计》高等教育出版社《发动机设计》机械工业出版社《内燃机设计》机械工业出版社相关技术参数国家标准4.进度安排注:一式4份,系部、指导教师各1份、学生2份:[毕业设计(论文)]及答辩评分表各一份发动机曲柄连杆机构建模与仿真摘要:以桑塔纳2000AJR型发动机为例,基于相关参数对发动机曲柄连杆机构主要零部件进行结构设计计算,同时进行强度、刚度等方面的校核,并进行相关运动学分析和机构运动仿真分析,以达到良好的生产经济效益。
目前国内外对发动机曲柄连杆机构的设计,建模与分析的方法很多,而且已经完善和成熟,但仍缺乏一种基于良好生产效益、经济效益上的综合性分析,本次设计在清晰、全面剖析的基础上,有机地将各研究模块联系起来,达到既简便又清晰的设计目的,力求为发动机曲柄连杆机构的设计提供一种综合全面的思路。
关键词:发动机曲柄连杆机构,机构设计, Pro∕Engineer,AutoCADMODELING AND SIMULATION OFCRANKSHAFT IN THEENGINEAbstract: Santana 2000AJR engine, for example, based on the relevant parameters of the engine crank linkage main components structural design calculations, while the strength, stiffness and other aspects of the check, and associated institutions kinematic analysis and motion simulation analysis to achieve good production value for money.At present method design, modeling and analysis of domestic and foreign engine crank linkage of many, and has perfect and mature, but still lacks a good production efficiency based on comprehensive analysis of the economic benefits of this design in a clear, on the basis of comprehensive analysis, organically linked to each research module, to achieve both simple and clear design purpose, strive to design the engine crank linkage provides a comprehensive idea.Keyword:Engine crank linkage,MechanismDesign,Pro/Engineer,AutoCAD目录1绪论 (1)1.1国内外发展现状 (1)1.2研究的目的及意义 (1)1.3研究的主要内容 (2)2总体方案的设计 (2)2.1原始参数的选定 (2)2.2原理性方案设计 (4)2.3结构性方案设计 (5)2.4设计方案的确定 (5)3曲柄连杆机构受力分析 (7)3.1曲柄连杆机构运动学 (8)3.1.1 活塞位移 (8)3.1.2 活塞的速度 (9)3.1.3 活塞的加速度 (9)3.2曲柄连杆机构中的作用力 (10)3.2.1 气缸内工质的作用力 (10)4活塞组的设计 (10)4.1活塞体的设计 (11)4.1.1 活塞的工作条件和设计要求 (11)4.1.2 活塞的材料 (12)4.1.3 活塞头部的设计 (12)4.1.4 活塞裙部的设计 (16)4.2活塞销的设计 (18)4.2.1 活塞销的结构、材料 (18)4.2.2 活塞销强度和刚度计算 (19)4.3活塞销座 (20)4.3.1 活塞销座结构设计 (20)4.3.2 验算比压力 (20)4.4活塞环设计及计算 (20)4.4.1 活塞环形状及主要尺寸设计 (20)4.4.2 活塞环强度校核 (21)5连杆组的设计 (23)5.1连杆组的工况、基本设计要求与材料选择 (23)5.1.1、连杆组工作情况 (23)5.1.2、连杆组设计要求 (23)5.1.3、连杆组材料的选择 (24)5.2连杆结构与尺寸的确定与校核 (24)5.2.1 连杆长度的确定 (24)5.2.2连杆小头的结构设计与强度、刚度计算 (24)5.2.3 连杆杆身的结构设计与强度计算 (27)5.2.4 连杆大头的结构设计与强度、刚度计算 (30)6曲轴的设计 (33)6.1曲轴的结构型式和材料的选择 (33)6.1.1 曲轴的工作条件和设计要求 (33)6.1.2 曲轴的结构型式 (34)6.1.3 曲轴的材料 (34)6.2曲轴的主要尺寸的确定和结构细节设计 (35)6.2.1 曲柄销的直径和长度 (35)6.2.2 主轴颈的直径和长度 (35)6.2.3 曲柄的设计 (36)6.2.4平衡块 (36)6.2.5 油道的布置与油孔的位置和尺寸 (37)6.2.6 曲轴两端的结构 (37)6.2.7 曲轴的止推 (38)6.3曲轴的疲劳强度校核 (38)6.3.1 作用于单元曲拐上的力和力矩 (38)6.3.2 名义应力的计算 (43)结论 (45)参考文献 (46)致谢 (47)1绪论1.1国内外发展现状目前,应用最广、数量最多的汽车发动机为水冷、四冲程往复活塞式内燃机,其中汽油机多用于轿车和轻型客货车上,而大客车和中、重型货车发动机多为柴油机。
曲柄摇杆机构运动学仿真
曲柄摇杆机构运动学仿真
曲柄摇杆机构是一种常用的机械传动机构,具有简单、紧凑、高效等特点。
在工程设计中,对于曲柄摇杆机构的运动学性能进行仿真分析可以帮助设计人员更好地理解机构的运动规律,优化设计参数,提高传动效率。
曲柄摇杆机构由曲柄、连杆和摇杆三个部件组成,其中曲柄是通过转动驱动,连杆和摇杆通过曲柄的推动而产生相应的运动。
在运动学仿真中,我们可以通过建立模型,解析运动关系方程,模拟机构运动过程,从而得到机构部件的位置、速度和加速度等参数。
我们需要建立曲柄摇杆机构的几何模型。
通过测量和绘图,确定曲柄、连杆和摇杆的长度和相对位置。
根据机构的几何结构,我们可以利用几何图形的计算方法,计算得到机构各个部件的位置坐标。
接下来,我们需对机构的运动规律进行分析和建模。
由于曲柄摇杆机构是一个复杂的多连杆机构,其运动关系方程较为复杂。
针对不同的机构类型,我们可以应用不同的方法来求解。
常见的方法有几何法、向量法和代数法等。
通过这些方法,我们可以得到机构各个部件之间的角度和位移关系。
运动学仿真的重点是模拟机构的运动过程。
我们可以利用计算机辅助设计软件或者编程软件进行仿真分析。
在仿真过程中,我们通过设定初始条件和边界条件,模拟机构不同时刻的位置、速度和加速度。
通过不断调整参数和观察仿真结果,我们可以对曲柄摇杆机构的运动特性进行深入了解。
我们可以对仿真结果进行分析和评估。
通过比较不同参数组合下的仿真结果,我们可以评估机构的运动性能和传动效率,并选择最佳参数组合。
我们也可以通过仿真结果来验证设计理论和分析方法的正确性。
基于ug的曲柄连杆机构的运动仿真

摘要: 三维模型虚拟设计是机械设计的必然趋势。
该文简述了三维设计软件UG NX5.0的强大功能,并且结合发动机曲柄连杆机构实现了模型的虚拟设计、虚拟装配及三维动态真。
关键词:虚拟设计;虚拟装配;三维动态仿真Engine Crank and Link Mechanism Motion Animation Based on UGAbstract: Three - dimentional model virtual design is the tendency of mechanic design. The paper simply state its powerful function of UG NX5.0 with three dimentional design soft, and realize model virtual design、virtual assembly and three - dimentional dynamic animation combined with engine crank and link mechanism.Key words: virtual design; virtual assembly; three - dimentional dynamic animation目录序言 (1)第1章基于UG的曲柄连杆机构的运动仿真的简介 (3)1.1 发动机曲柄连杆机构的虚拟设计 (3)1.2 虚拟装配 (4)1.3 运动仿真 (4)第2章曲柄连杆机构的拆装和零件的测绘 (6)2.1曲柄连杆机构的拆卸 (6)2.3 零件的测绘 (9)2.3.1 游标卡尺的读数原理和读数方法 (9)2.3.2 直径和孔深尺寸的测量 (10)2.4 测绘零件时的注意事项 (10)第 3章曲柄连杆机构的三维造型 (12)3.1曲柄的绘制过程 (14)3.2连杆的三维造型 (22)3.3 活塞的三维造型 (27)第4章曲柄连杆机构的虚拟装配 (33)4.1 装配综述 (33)4.2 曲柄连杆机构的装配实例 (34)第5章曲柄连杆机构的运动仿真 (38)5.1运动仿真综述 (38)5.2 运动仿真创建实例 (40)参考文献 (46)致谢 (47)曲柄连杆机构运动仿真设计(基于UG)序言虚拟技术是近年来随着计算机辅助设计技术发展起来的一种新型技术。
(完整版)曲柄连杆机构运动学仿真
课程设计任务书目录1 绪论 (1)1.1CATIA V5软件介绍 (1)1.2ADAMS软件介绍 (1)1.3S IM D ESIGNER软件介绍 (2)1.4本次课程设计的主要内容及目的 (2)2 曲柄连杆机构的建模 (3)2.1活塞的建模 (3)2.2活塞销的建模 (5)2.3连杆的建模 (5)2.4曲轴的建模 (6)2.5汽缸体的建模 (8)3 曲柄连杆机构的装配 (10)3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10)4 曲柄连杆机构导入ADAMS (14)4.1曲柄连杆机构各个零部件之间运动副分析 (14)4.2曲柄连杆机构各个零部件之间运动副建立 (14)4.3曲柄连杆机构导入ADAMS (16)5 曲柄连杆机构的运动学分析 (17)结束语 (22)参考文献 (23)1 绪论1.1 CATIA V5软件介绍CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。
它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。
CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。
CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。
由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。
法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。
曲柄摇杆机构运动学仿真
曲柄摇杆机构运动学仿真作者:马乐来源:《山东工业技术》2019年第15期摘要:曲柄摇杆机构在平面四杆机构中占重要地位,创建机构的几何模型,使用Adams 和SolidWorks对机构的几何模型进运动学方面的初步仿真。
对从动件摇杆的位姿等运动参数进行简单的分析。
关键词:曲柄摇杆机构;几何模型;初步仿真;分析DOI:10.16640/ki.37-1222/t.2019.15.2171 绪论四杆机构的应用几乎遍及现代工业的各个方面。
持续高速发展进的制造业对曲柄摇杆机构的机构尺寸、结构布局、运动特性及结构整体受力状况等提出了很高的要求,以适用于新型机械设备。
连杆机构的设计问题通常可归为按给定的运动规划设计和按给定的运动规律设计。
本论文将基于Matlab的对曲柄摇杆机构的基础优化与运动学仿真分析結合成综合性的设计方案,从而提升并验证二维曲柄摇杆机构的综合机能。
2 曲柄摇杆机构的运动学仿真分析2.1 SolidWorks Motion分析本文采用的是SolidWorks Motion分析功能进行简单的初步运动学仿真分析。
SolidWorks Motion的Phoronomics仿真有ADAMS系统的强效支撑,运动学仿真功能较为完善。
曲柄摇杆机构结构简单,依据前文所给优化后实例,鉴于本文只做初步运动学分析,将该曲柄摇杆机构视作简单理想刚体进行运动仿真,忽略杆件本体质量(引力)及各转动副摩擦,只研究摇杆的一系列运动特性。
2.2 仿真分析过程确认软件已经加载了SolidWorks Motion插件,用SolidWorks 2016绘制的曲柄摇杆机构三维图,设置文档单位,添加驱动——马达,机构中的原动件以100r/min匀速转动,现只考虑摇杆的输出数据,输出的图表结果图2至图7:以上为摇杆输出角度方面的各个运动参数的数据曲线图表,具体名称见上图。
综合以上图表数据,依据前文Matlab优化得到的曲柄摇杆机构各个杆件尺寸绘制的曲柄摇杆机构装配体,基本满足所要求的约束条件,仍然存在一定误差,有待后续改进。
发动机曲柄连杆机构建模与仿真共3篇
发动机曲柄连杆机构建模与仿真共3篇发动机曲柄连杆机构建模与仿真1发动机是现代汽车的核心部件,而发动机的曲柄连杆机构是其重要组成部分。
曲柄连杆机构是将活塞的往复直线运动转化为曲柄的旋转运动,并将曲柄的旋转运动传递到汽车的传动系统,驱动汽车前进。
因此,对曲柄连杆机构的建模与仿真研究具有非常重要的意义。
建模是对一个系统或过程的抽象和简化,建立数学模型并用计算机仿真求解。
而曲柄连杆机构建模与仿真,是指在计算机软件的帮助下将传统的手工绘图、计算曲柄连杆运动轨迹的工作转化为计算机模型建立、仿真分析的过程。
这种方法的好处是可以大大提高计算效率,同时可以方便的进行参数化分析,探究系统的适用性以及其内部机制。
曲柄连杆机构建模的第一步是建立坐标系。
我们需要确定一个参考点,通常是发动机曲轴中心线。
接着,我们需要定义每个零件的位置,通过坐标系来描述。
例如,对于一个柄头与曲轴的配合,我们需要确定其位置和姿态。
曲柄连杆机构的建模需要包括曲轴、连杆和活塞。
在建模时,我们需要确定曲轴的几何尺寸和转动轴线的位置,这样才能计算出曲轴相对坐标系的位置和姿态。
对于连杆,我们需要定义其长度、部位的尺寸和材料以及其他参数,同时也需要考虑连杆的固定方式。
活塞建模需要考虑它的直径、长度以及密封件等参数。
建模完成后,我们需要用计算机软件来进行仿真分析。
在仿真分析时,需要输入相关的工作参数(如发动机的工况、所加载的载荷等),以获取系统在不同参数下的性能表现。
仿真分析主要包括如下几方面:(1) 运动学分析:通过对曲柄连杆机构中每个零件的几何形状和位置关系的分析,得出其运动轨迹,进而分析每个零件的运动状态。
(2) 动力学分析:通过对曲柄连杆机构在不同载荷下的工作性能的分析,得出曲轴、连杆及柄头的最大受力情况,从而进一步分析系统劳动寿命等相关参数。
(3) 模态分析:通过对曲柄连杆机构在工作条件下的振动模态进行分析,探究系统在不同频率下的振动特性以及如何减少或消除系统中的振动问题。
280柴油机曲轴连杆活塞机构的运动学动力学仿真
$"# 标 准 型 柴 油 机 的 曲 轴 ! 连 杆 ! 活塞机构进行了运动学和 动力学仿真分析。 仿真得到的机 构运动学和动力学特性, 与理论 计算结果吻合较好, 可为该型柴 油机的曲柄连杆机构的优化和 改进设计提供依据。 对于其它型 号的柴油机, 应用同样的处理方 法,只要简化得当,就可以得到 好的模拟效果。
参考文献
% 刘延柱 K 多刚体系统动力学 2 高等教育出版社, %L"L2 王以伦 2 多刚体动力学基础 2 哈尔滨工程大学, $ 陈乐生, %LL,2 1 郑启福 K 内燃机动力学 2 国防工业出版社, %LL%2 杜静 2 机械 C>M 0 C>N 应用技术基础 2 机械工业出版社, & 陈国聪, $##$2
参考文献(4条) 1.刘延柱 多刚体系统动力学 1989 2.陈乐生.王以伦 多刚体动力学基础 1995 3.郑启福 内燃机动力学 1991 4.陈国聪.杜静 机械CAD/CAE应用技术基础 2002
相似文献(10条) 1.学位论文 杨拴柱 RFID倒装键合机预贴片系统设计与仿真 2006
本文研究了RFID(Radio Frequency Identification,射频识别)标签封装设备中预贴片系统的设计、分析与实现。预贴片系统主要功能是通过倒装贴片工艺将 RFID 芯片倒扣于天线基板上,实现芯片与天线的电气和机械连接,其性能直接影响到最终RFID 标签的质量。 论文对预贴片系统的整体结构进行了分析,将系统划分为四个机构:芯片送料机构、翻转头机构、贴片机构和XY 运动平台,主要对多吸嘴转盘式贴装头进行了 设计。 提出了满足技术指标要求的整体设计方案。 由于预贴片系统两个翻转头和两个贴装头机构在工作空间中存在干涉,使用Deneb/Envision 软件对预贴片系统进行了芯片封装过程的运动学仿真,根据仿真结 果,本文设计了系统的运动时序,在确保系统运动过程中不发生干涉情况下,使预贴片系统达到了预期的生产效率。此外,还根据仿真结果,确定了翻转头最小转动 加速度,以保证两个翻转头共用一个芯片送料机构不影响整个系统效率。 由于预贴片系统要求速度快,因此采用了同步带定位系统。为了研究同步带定位系统的振动情况,本文建立了同步带定位系统的简化模型,并将模型的仿真结果 与实验结果进行了比较与分析。动力学仿真结果显示,同步带定位系统系统在驱动力发生跳跃时,负载的加速度出现振动。 针对设备开发中控制程序复杂,团队开发而硬件资源不足的情况,本文提出了一种将仿真过程中编写的控制代码直接移植到控制系统中的方法。文中采用组件的 方法,对系统原型进行了实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计任务书目录1 绪论 (1)1.1CATIA V5软件介绍 (1)1.2ADAMS软件介绍 (1)1.3S IM D ESIGNER软件介绍 (2)1.4本次课程设计的主要内容及目的 (2)2 曲柄连杆机构的建模 (3)2.1活塞的建模 (3)2.2活塞销的建模 (5)2.3连杆的建模 (5)2.4曲轴的建模 (6)2.5汽缸体的建模 (8)3 曲柄连杆机构的装配 (10)3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10)4 曲柄连杆机构导入ADAMS (14)4.1曲柄连杆机构各个零部件之间运动副分析 (14)4.2曲柄连杆机构各个零部件之间运动副建立 (14)4.3曲柄连杆机构导入ADAMS (16)5 曲柄连杆机构的运动学分析 (17)结束语 (22)参考文献 (23)1 绪论1.1 CATIA V5软件介绍CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。
它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。
CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。
CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。
由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。
法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。
另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。
CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。
CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。
1.2 ADAMS软件介绍ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。
目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。
根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
ADAMS一方面是虚拟样机分析的应用软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。
另一方面,又是虚拟样机分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊类型虚拟样机分析的二次开发工具平台。
ADAMS软件有两种操作系统的版本:UNIX版和Windows NT/2000版。
1.3 SimDesigner软件介绍SimDesigner for CATIA V5 系列产品是构建于CAA V5的体系结构上,并与Dassault Systemes公司达成密切合作伙伴关系而开发。
Simdesigner使CATIA用户能够以集成和可扩展的方式获取MSC.Software公司仿真工具和技术,从而在整个产品生命周期中减少设计和物理试验的成本。
SimDesigner for CATIA V5产品家族由创成式(Generative)产品系列、接口类产品系列、垂直应用产品系列和针对特定学科的配置组成。
SimDesigner 创成式产品系列将MSC.Software仿真解决方案无缝集成到CAD环境中,侧重于对产品。
进行多学科综合的特性评估,例如结构线性、动力学、热、结构非线性等。
SimDesigner 接口类产品系列在CATIA环境与客户所拥有的独立的VPD产品之间提供了无缝的双向链接。
SimDesigner垂直应用类产品可以在CATIA V5环境下进行产品评估及流程知识的捕获、存储和重新利用,这些知识涉及产品制造、测试和验证等各个方面。
SimDesigner当前提供了三个产品配置,为解决特定类型的相关问题提供了一组分析产品。
1.4 本次课程设计的主要内容及目的本次课程设计主要内容:利用CATIA软件中的零件设计模块对曲柄连杆机构的所有零件进行建模,然后利用软件的装配模块把曲柄连杆机构的所有组成零件按照一定的位置关系进行装配,最后利用ADAMS软件对曲柄连杆机构进行运动学仿真和分析。
本次课程设计的主要目的:通过完成以上的内容,对CATIA软件零件设计模块、装配模块和ADAMS软件运动仿真及分析的应用有了更加深入的了解,对软件的操作更加熟练,最终达到熟练掌握这门软件的目的。
2 曲柄连杆机构的建模2.1 活塞的建模活塞直径76mm,高61mm,裙部厚度3mm,活塞顶部厚20mm,活塞销孔直径18mm,活塞销孔中心到活塞顶部距离28.5mm,绘制活塞三维图步骤如下:(1) 打开CATIA---开始---机械设计---零件设计,进入绘制活塞的工作模块(如图2.1),点击平面图标并选XOY平面,将XOY平面平移400mm。
图2.1 零件设计模块(2) 点击草图图标并选平移后的平面,进入草图绘制模块,点击画圆图标建圆,圆心坐标为(0,0),半径为38mm。
(3) 点击退出工作台图标退出草图,点击凸台图标进行拉伸,拉伸61mm。
(4) 选择下底面并点击草图图标进入草图,点击画圆图标建圆,圆心(0,0),半径35mm,点击直线图标做一条过圆心的直线,再点击平移图标,将直线向两侧各平移15mm。
(5) 点击断开图标,将圆与两条评议后的平行直线断开,点击快速修剪图标将多余部分修剪掉(如图2.2)。
图2.2 绘制凹槽轮廓(6) 点击退出工作台图标退出草图,点击凹槽图标打凹槽,深度51mm。
(7) 点击草图图标并选XOZ平面进入草图,点击画圆图标以(0,371.5)为圆心,半径9mm建圆。
(8) 点击退出工作台图标退出草图,点击凹槽图标,选中镜像范围,向两边各拉伸38mm(如图2.3)。
图2.3 打活塞销孔2.2 活塞销的建模活塞销直径18mm,长度73mm,绘制活塞销三维图步骤如下:(1) 打开CATIA---开始---机械设计---零件设计,进入绘制活塞销的工作模块,点击平面图标并选XOZ平面,将XOZ平面平移-200mm。
(2) 点击草图图标并选平移后的平面进入草图绘制模块,点击画圆图标,以(0,0)为圆心,半径9mm建圆。
(3)点击退出工作台图标退出草图,点击凸台图标拉伸73mm成圆柱体(如图2.4)。
图2.4 拉伸活塞销2.3 连杆的建模连杆小头的内径18mm,外径27mm,厚28mm,连杆大头内径43mm,外径56mm,厚32mm,大头中心与小头中心距离150mm,杆身厚10mm,绘制连杆三维图步骤如下:(1) 打开CATIA---开始---机械设计---零件设计,进入绘制连杆的工作模块。
(2) 点击草图图标并选XOZ平面进入草图绘制模块,点击画圆图标,以(0,0)为圆心,做两个同心圆,半径分别为9mm,13.5mm,点击退出工作台图标退出草图,点击凸台图标,选中镜像范围,向两边各拉伸14mm。
(3) 点击草图图标并选平移后的平面进入草图绘制模块,点击画圆图标,以(0,-150)为圆心,做两个同心圆,半径分别为21.5mm,28mm点击退出工作台图标退出草图,点击凸台图标,选中镜像范围,向两边各拉伸16mm。
(4) 点击草图图标并选XOY平面进入草图绘制模块,点击投影3D元素图标将两同心圆柱体的轮廓线投影在XOY平面,点击双切线图标做直径为18mm和43mm圆的切线,然后点击断开图标将直径为27mm与56mm两圆和两条切线在交点处断开,点击快速修剪图标将多余部分修剪掉。
(5) 点击退出工作台图标退出草图,点击凸台图标,选中镜像范围,向两边各拉伸5mm(如图2.5)。
图2.5 镜像拉伸连杆体2.4 曲轴的建模曲轴直径41mm,长28mm,曲拐长128mm,宽66mm,厚20mm,两曲拐间的距离为34mm,飞轮直径80mm,厚4mm,绘制曲轴三维图如下:(1) 打开CATIA---开始---机械设计---零件设计,进入绘制曲轴的工作模块,点击平面图标并选XOZ平面,将XOZ平面平移200mm。
(2) 点击草图图标并选平移后的平面进入草图绘制模块,点击画圆图标,以(0,0)为圆心,半径为20.5mm建圆。
(3) 点击退出工作台图标退出草图,点击凸台图标拉伸28mm。
(4) 选择圆柱体的一个底面并点击草图图标进入草图,点击画圆图标,分别以(0,0)和(0,62)为圆心,33mm为半径建圆,点击双切线图标做两圆的外切线,点击断开图标将相切圆和相切直线在切点处断开,点击快速修剪图标将多余的线修剪掉(如图2.6)。
图 2.6 曲拐草图(5) 点击退出工作台图标退出草图,点击凸台图标拉伸20mm,选曲拐的另一平面并点击草图图标进入草图,点击画圆图标,以(0,62)为圆心,半径为28mm 建圆。
(6) 点击退出工作台图标退出草图,点击凸台图标拉伸17mm,点击镜像图标选中半径为28mm圆柱体的另一个面做全部实体的镜像(如图2.7)。
图2.7 镜像曲轴2.5 汽缸体的建模汽缸体长100mm,宽100mm,高362mm,曲轴中心到汽缸体上表面距离262mm,气缸深度125.5mm,绘制汽缸体的三维图如下:(1) 打开CATIA---开始---机械设计---零件设计,进入绘制汽缸体的工作模块,点击平面图标并选XOY平面,将XOY平面平移1000mm。
(2) 点击草图图标并选平移后的平面进入草图绘制模块,点击居中矩形图标,绘制以(0,0)为中心,边长为100mm的正方形。
(3) 点击退出工作台图标退出草图,点击凸台图标拉伸362mm,选择下底面并点击草图图标进入草图,点击画圆图标以(0,0)为圆心,半径38mm建圆,点击退出工作台图标退出草图,点击凹槽图标,凹槽深度342mm,点击草图图标并选XOZ平面进入草图绘制模块,点击画圆图标以(0,738)为圆心,半径20.5mm 建圆,点击退出工作台图标退出草图,点击凹槽图标选择镜像范围,凹槽深度向两侧各50mm,点击草图图标并选YOZ平面进入草图绘制模块,点击投影3D元素图标将长方体的四个边投影在YOZ平面上,点击平移图标点击平移图标将上表面投影的直线向下平移145.5mm,将两侧面投影的直线分别向中间平移12mm,点击断开图标将平移后所得的直线在交点处断开,点击快速修剪图标将多余的线修剪掉,点击退出工作台图标退出草图,点击凹槽图标选择镜像范围,凹槽深度向两侧各50mm(如图2.8)。