基于微型四旋翼无人机的智能导航系统
毕业论文基于ARM的四旋翼自主飞行控制系统设计

2016 南阳理工学院本科生毕业设计论文学院系电子与电气工程学院专业电子信息工程学生指导教师完成日期南阳理工学院本科生毕业设计论文基于ARM的四旋翼自主飞行控制系统设计Autonomous control system for the quadrotor unmannedaerial vehicle based on ARM processors总计毕业设计论文25 页表格0 个插图20 幅3 南阳理工学院本科毕业设计论文基于ARM的四旋翼自主飞行控制系统设计Autonomous controlsystem for the quadrotor unmanned aerial vehicle based on ARM processors学院系电子与电气工程学院专业电子信息工程学生姓名学号指导教师职称评阅教师完成日期南阳理工学院Nanyang Institute of Technology4基于ARM的四旋翼自主飞行控制系统设计[摘要]针对改变传统以单片机为处理器的四旋翼自主控制飞行器控制方式的问题设计了一种基于嵌入式ARM的飞行控制系统的设计和实现方案。
这是一种基于ARM的低成本、高性能的嵌入式微小无人机飞行控制系统的整体方案。
详细介绍了控制系统的总体构成以及硬软件设计方案包括传感器模块、视屏采集模块、系统核心控制功能模块、无线通信模块、地面控制和数据处理模块。
实验结果表明该设计结合嵌入式实时操作系统保证了系统的高可靠性和高实时性能满足飞行器起飞、悬停、降落等飞行模态的控制要求。
[关键词]ARM四旋翼自主飞行器控制系统。
Autonomous control system for the quadrotor unmannedaerial vehicle based on ARM processors Abstract In order to change the conventional control of four—rotor unmanned aerial vehicles using microcontroller as the processor a solution of flightcontrol system based on embedded ARM was presented which is low-cost,small volume, low power consumption and high performance. The purpose ofthe work is for attending the National Aerial Robotics Competition. The mainfunction of the system the hardware structure and the software design werediscussed in detail including the sensor module the motor module the wirelesscommunication module With embedded real time operating system to ensurethe system’s high reliability and real-time performance the experiments resultsshow that the requirements of flight mode are satisfied including taking ofhovering and landing and so onKey words ARM four-rotor unmanned aerial vehicles control system5 of the control signals 1 四旋翼飞行器的简介 1.1题目综述微型飞行器MicroAir Vehicle/MAV的概念最早是在上世纪九十年代由美国国防部远景研究局DARPA提出的。
基于VSLAM的UAV室内导航系统

摘要摘要无人机技术在物流、工业等领域发挥着重要的作用,传统的无人机主要依托GPS进行室外导航,但无人机室内导航与自动驾驶为亟待解决的问题。
针对这一问题本文对UA V导航系统、VSLAM技术以及语义SLAM进行研究,设计出基于VSLAM的UA V室内导航系统,可实现UA V在室内未知环境下的自主导航。
本文主要工作内容如下。
(1)VSLAM技术的研究综述。
首先对传统的SLAM技术与VSLAM技术进行研究,分析VSLAM技术在无人机平台运行的可行性。
其次对图像的特征提取、2D/3D的信息感知方法进行综述,将与VSLAM技术相关联的感知方案进行总结。
然后对深度学习与VSLAM技术各部分融合的经典方法进行整理,通过对比体现了在VSLAM中引入深度学习技术的优势。
(2)VSLAM算法的研究与实现。
VSLAM系统一般基于经典的VSLAM框架,本文选取ORB-SLAM2作为本系统的基础框架,使用基于ORB特征的视觉里程计作为前端部分,选用图优化+词袋法作为系统的后端与回环检测部分。
在建图方面分别针对UV A导航的特点对2D/3D点云以及八叉树地图进行介绍,并在Ubuntu+ROS平台中进行各个部分的算法验证。
(3)语义SLAM技术的研究与实现。
对语义SLAM进行研究,将VSLAM系统引入语义信息。
首先基于扩展卡尔曼算法实现传感器数据融合,优化相机位姿的判断以增加视觉里程计的鲁棒性。
其次基于RetinaNet+光流法实现动态特征点的筛选,并提出基于Yolact/DeepLab+条件随机场的3D点云分割与检测算法,将地图模型中的物体进行3D检测与分割并存储至物体库中。
在物体库中加入实例与语义判断标签、相对位置的分布权重标签,对于元素的类别信息作为语义信息的首个标签做处理,在存储时进行筛选判断最后使用基于特征描述向量的物体库更新方法,优化物体库的更新效率。
(4)基于VSLAM的UA V室内导航系统的设计与实现。
对无人机的飞控、外扩模块以及地面监测站进行设计,并将本文所设计的VSLAM系统引入该四旋翼无人机平台中进行测试,为无人机室内导航系统的开发提供支持与参考。
四旋翼无人机自主避障系统的设计与实现
四旋翼无人机自主避障系统的设计与实现作者:胡海兵汪国庆赖重远张结文来源:《现代电子技术》2018年第22期摘要:针对自主导航过程的预先避障和飞行控制中预判与控制,该文利用超声波检测距离原理对体小质轻、低空低速的小型无人机导航控制系统的自主避障功能进行了研究。
小型无人机将AHRS信息采集与避障飞行控制分开设计为两部分相对独立的系统。
两片DSP 芯片分别实现姿态数据采集、处理和避障导航计算,有效降低了导航系统的计算复杂度,实时通信和数据处理更加流畅。
飞行实验表明,无人机可以预判,及时规避障碍物和自主巡航,设计方案可靠稳定,可为民用小型无人机的设计与应用提供参考。
关键词:无人机;四旋翼;自主导航;避障;定位;超声波测距中图分类号: TN752.6⁃34 文献标识码: A 文章编号: 1004⁃373X(2018)22⁃0133⁃05Abstract: In allusion to the obstacle pre⁃avoidance in the autonomous navigation process and the prejudgment and control in flight control, the autonomous obstacle avoidance function of the small?scale low⁃altitude and low⁃speed unmanned aerial vehicle (UAV) navigation control system with small volume and light weight is studied by using the distance detection principle of the ultrasonic wave. In the small⁃scale UAV, the AHRS information acquisition and obstacle avoidance flight control are separately designed into two parts of relatively⁃independent systems. The two DSP chips are adopted to respectively realize attitude data acquisition and processing and navigation calculation of obstacle avoidance, so as to effectively reduce the computational complexity of the navigation system, and make the real⁃time communication and data processing more smooth. The results of the flight experiment show that the UAV can prejudge and avoid obstacles timely, and perform autonomous cruise; the design scheme is reliable and stable, which can provide a reference for design and application of the small⁃scale civil UAV.Keywords: UAV; quadrotor; autonomous navigation; obstacle avoidance; positioning;ultrasonic distance measurement近年来,自主导航无人机以其低廉的成本、无人员伤亡风险、机动性能好、使用方便等优势,在高危作业、灾害航拍、抢险布控、环境监测等领域得到了广泛的应用[1]。
基于现代多旋翼无人机的GPS模块创新设计
1 现代多旋翼无人机概述 1.1 背景与意义 UAV(unmanned aerial vehicle)即无人机,无人机是无
人驾驶飞行器的一种泛称,无人机实现了无人控制,在飞行时 依飞行器的动力装置所获得的升力来抵消飞行器自身的重量, 可通过遥控设备或自主飞行来实现复杂的空中飞行任务。在众 多的无人机类型中,四旋翼飞行器具有出色的性能,相较于固 定翼无人机而言,四旋翼无人机对于起飞条件的要求更低,可 实现垂直起降,其机械架构十分加单,具有负载能力强,可实 现垂直起飞和降落等优点。由于四旋翼飞行器在飞行控制、结 构设计、安装调试等方面的要求较高,因此当前四旋翼飞行器 的研究已成为学术界专家学者研究的热点问题之一。世界上首 架真正意义上的无人机由美国学者所研发并试飞成功。在20世 纪中期,随着自动控制技术和导航技术的逐渐发展,为无人机 的出现和研发奠定了基础,同时,多领域的应用需求使其有着 无与伦比的发展优势[1]。
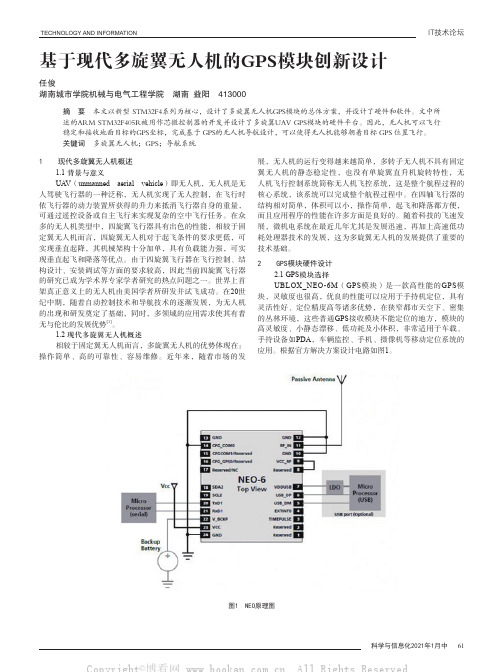
2 GPS模块硬件设计 2.1 GPS模块选择 UBLOX_NEO-6M(GPS模块)是一款高性能的GPS模
块,灵敏度也很高,优良的性能可以应用于手持机定位,具有 灵活性好、定位精度高等诸多优势,在狭窄都市天空下、密集 的丛林环境,这些普通GPS接收模块不能定位的地方,模块的 高灵敏度、小静态漂移、低功耗及小体积,非常适用于车载、 手持设备如PDA,车辆监控、手机、摄像机等移动定位系统的 应用。根据官方解决方案设计电路如图1。
图3 强磁传感器 (4)CAN总线通信硬件 所述TJA1050设计有先进的硅绝缘体上SOI技术和最新的EMC 技术,所以TJA1050具有优异的EMC性能[5]。该TJA1050T具有用 于选择,高速模式和静音模式的两种操作模式。对于CAN收发器 而言,正常模式是用于正常的CAN通讯。从TXD输入的数字位 流,可转换为相应的模拟总线信号,与此同时,监控总线可将模 拟总线信号转换为对应的数字位流,并在RXD引脚完成输出[6]。 TJA1050T正常工作在高速模式,TJA1050 提供一个专用的静音 模式,这个模式中发送器完全禁能。这样就保证了没有信号能够 从TXD引脚发送到CAN总线上,像TJA1040在待机模式一样,这 个静音模式可以建立一个Babbling Idiot保护[7]。如图4所示。
具有超视距巡航的四旋翼无人机研制
2016.15
具有超视距巡航的四旋翼无人机研制
周 超,刘长华 (中国民用航空飞行学院民航飞行技术与飞行安全科研基地 , 四川广汉 ,618307)
摘要 :本文以四旋翼作为飞行平台,用 arduino mege 2560 单片机,三轴陀螺仪 MUP6000,三轴加速度仪 MUP6000,高精度数字 空气压力传感器 MS5611,三轴磁力计,高精度 6M-GPS,3DR RADIO 与无人机实时通信,实现对无人机姿态的控制和地理坐标 的检控。以 APM 无人机开源程序为基础,修改程序代码,依靠三轴陀螺仪和三轴加速度仪对无人机的姿态进行修正,利用 GPS 和气压高度计的信号对无人机的航向、位置进行修正,使无人机的飞行姿态更加稳定。实际测试表明:该无人机具有一键返航、 一键定高、预先设置航点飞行、地面站实时监控和超视距巡航等功能,能够用于航拍航测等领域。 关键词 :无人机 ; 四旋翼 ;APM; 超视距 ; 巡航
来解决,目前测试中使用的 5m/s 不会造成较大倾角。
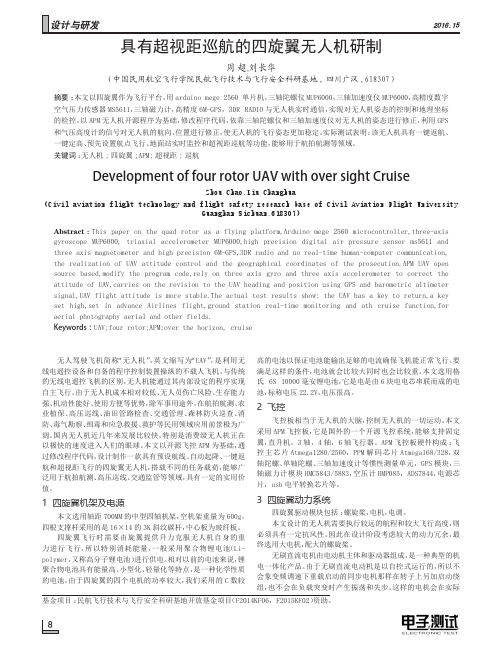
本文设计的四旋翼无人机如图 1 所示。
图 1 四旋翼无人机
4 测试结果
4.1 飞行稳定测试 通过从三轴陀螺仪 MUP6000 采集的数据进行解算,得出无人
机的姿态,并利用算法调整无人机姿态使其飞行平稳。但由于每 个旋翼桨自身的参数性能有所不同,因此需要通过调整 PID 来使 飞机变得稳定。如图 2 为 IMU 采集的无人机 X 轴的加速度数据。 可以看出无人机 X 轴的速度基本控制在 5m/s 范围内时,X 轴的 加速度很稳定。从实际目测看,无人机的姿态非常稳定,基本没有
高的电池以保证电池能输出足够的电流确保飞机能正常飞行。要 满足这样的条件,电池就会比较大同时也会比较重。本文选用格 氏 6S 10000 毫安锂电池,它是电是由 6 块电电芯串联而成的电 池,标称电压 22.2V,电压很高。
小型四旋翼无人机飞行控制系统设计与实现

小型四旋翼无人机飞行控制系统设计与实现李杰;齐晓慧;韩帅涛;刘星海【摘要】为进一步深入研究和开发小型四旋翼无人机搭建飞行控制实验系统,从硬件设计、软件开发和系统调试与飞行试验3个方面对搭建的小型四旋翼无人机飞行控制系统进行较为详细地阐述.飞行试验表明:所设计的飞行控制系统初步实现了对机体姿态的有效控制,为进一步研究自主飞行奠定了基础.【期刊名称】《中国测试》【年(卷),期】2014(040)002【总页数】4页(P90-93)【关键词】小型四旋翼无人机;飞行控制系统;硬件设计;软件设计;系统调试;飞行试验【作者】李杰;齐晓慧;韩帅涛;刘星海【作者单位】军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003【正文语种】中文【中图分类】V279;V249;V217;TP2730 引言随着嵌入式处理器、传感器、导航、通信、动力与能源供给以及控制理论等技术的发展,具有广阔军事和民用前景的小型四旋翼无人机的研究与开发已经取得了很大的进展并逐步得到广泛应用[1-5]。
搭建飞行控制实验系统对深入研究与开发小型四旋翼无人机有很重要的现实意义。
通过这个平台可以展开控制算法、控制系统和导航等方面的研究,为实现小型四旋翼无人机在复杂环境中的自主飞行、编队飞行以及应用打下基础。
本文从硬件设计、软件开发、系统调试与飞行试验3个方面对搭建的飞行控制系统进行较为详细的阐述,并在系统调试的基础上进行有关飞行试验。
1 硬件设计与实现1.1 飞行控制系统硬件总体设计整个飞行控制系统硬件构成包括中心控制模块、传感器模块、四电机控制模块、遥控接收机/导航控制模块、无线通信模块和电压转换模块等部分[6]。
(1)中心控制模块即飞行控制系统的的核心处理器,是系统的核心控制部分。
负责采集传感器(包括九轴姿态传感器和高度传感器)信息并实时解算出机体姿态角和高度;根据遥控接收机信息或者导航信息,结合实时解算的机体姿态角和高度,控制电机转速;通过无线通信模块与地面站进行数据双向传输,包括上传控制指令或修改参数和下传飞行状态数据。
基于Arduino的旋翼无人机室内定位系统设计
P j X h a Wk 飞控在室内定位系统中作为底层控制器 , 主要有两个 以沿标定点定路线 自主飞行为例阐述系统控制流程 。 飞行器启 控制 回路 , 分别为姿态控 制与增稳控制 , 姿态控制 回路根据飞行器 动后 , 手摇起飞 ; 进入参数初始化及系统 自 检阶段, 通过则问询是否 回传的姿态角采用P I D控制算法做角度控制 , 增稳控制回路根据 回 切换为 自主导航 , 未通过则返 回遥操作, 确认执行 自主导航任务 , 则 传的角速度进 行稳定控 制。 系统依 次读取路 线坐标 、 解 算姿态 期望值 、 计算 高度补 偿及输 出 P i x h a wk 飞控通过接收Ar d u i n o 传输到油 门、 俯仰 、 滚转, 航向 P WM信号至 电调 , 此过程 中, 需要实时 问询是否 已到达 目标位置 四个通道 的P WM信号 , 根据控 制算法输出四路P wM信号传输至电 点 , 如否 , 则继续重复该步骤 , 如是则切 换回遥 操作 , 而确认不执行 调 以实现对飞行器 的内环控制 。 自主导航则系统切换 回遥操作 。 姿态控制器包 括P I D 控制器与输 出解算器两部分 , 根据飞机 回 4结 语 传的姿态 角采用P I D 控制算法做角度控 制, 表示绕机体坐标系轴的 针对在 平整地面上 的较精确高度保持和设定 目标任务 下的 良 欧拉 角, 对 应于惯性坐标系轴 即俯仰 角、 滚转角、 航 向角 , Z 为高度 , 好条 件一致 性 , 课题对 目标飞行 器进行 了系统设计 , 给 出了基于 分别为俯 仰、 滚转、 偏航及油 门通道的输入量 。 2 . 2定位 导航 系统设 计 A r d u i n o 的旋翼无人机 室内定位系统设计方案 , 为后续旋翼飞行器 系统用于 飞行控制数据处理 的上位机为Ar d u i n o Me g a 2 5 6 0 , 面 向任务开展的室 内定位工作打下了 良好基 础。 定高测距 采用HC — S R0 4  ̄ [ ! 声波模 块, 光流计定位模块采用机载摄 参考文 献 像头 , 通过对 比回传 图像能得到飞行器在 某段 时间内的运动轨迹 , [ 1 ] 吕强, 倪佩佩, 王 国胜。 等. 基 于光流传感器 的四旋翼飞行器悬停校 从而推算出飞行器 的运动速 度和方向 ,系统选用 了P X4 F L O W光 正[ J ] . 装 甲兵工程 学院学报, 2 0 1 4 , 2 8 ( 3 ) : 6 8 — 7 2 . 流传感器 。 [ 2 ] 陈远炫。 裴海龙, 陈勇, 等. / J 、 型无人机 飞行控制系统硬件设计 与实
一种低成本、高集成度的微型无人机组合导航系统设计
( 河南省军区 郑州 4 5 0 0 1 4 )
摘
要
微 型 导航 系统 是 微 型 无 人 机 的 关 键 核 心 技 术 之 一 。论 文着 眼微 型无 人 机 导 航 系 统 一 体 化 、 小型化、 综 合 化 的发 展 趋 势 , 基 于 低
成本 、 高 集 成 度 的惯 性 测 量 单 元 AD I S 1 6 4 0 5和 GP S全 球 定 位 系统 , 以 国产 AR M 微处理器为导航计算核心 , 提 出 了一 种 新 的捷 联 惯 导 系 统 / GP S组 合 导 航 系统 设 计 方 法 。通 过 对 导 航算 法 的研 究 , 硬 件 及 软 件 的设 计 , 研 制了一套体 积小 、 精度 高、 实时性强 的组合 导航系统 , 较 好 地 满 足 了某 微 型无 人 机 的需 求 。室 内试 验 和 车 载 实 验 均 表 明该 系 统导 航 精 度 高 、 性能稳定可靠 。
Cl as s Nu mb e r P2 2 8
l 引 言
微型无人机 因具有 体积小 、 重量 轻 、 携 带方便 、 隐 蔽 性
Hale Waihona Puke 受干扰 、 数据更新频率 低 , 单独 使用也 难 以满足 高速 、 实 时 导航的要求 。因此 , 利用二 者优 势 , 组 合成 可 长时 间工作 、
Abs t r a c t Mi c r o n a v i g a t i o n s y s t e m i s o n e o f t he k e y t e c h n o l o g i e s o f Mi c r o UAV d e v e l o p me nt .I n t he p a p e r .f o c u s i n g o n t h e d e v e l o p
基于foc的四旋翼无人机电机驱动系统设计与实现
Finally, the FOC motor drive system is analyzed by the software and hardware test. The test results show that the system can better achieve motor start and commutation. Compared with the commonly square wave power transfer control, under the same pulling force and
Key words:Quadrotor, Field Oriented Control, Motor Drive, SVPWM
基于四旋翼无人机的单目建模系统
基于四旋翼无人机的单目建模系统庄晓明;李涛;付龙【摘要】为了实现四旋翼无人机的自主飞行、环境单目稠密重建与即时导航功能,文中设计了该单目建模导航系统。
飞行控制器采用MPU6050六轴传感器采集六轴信号,通过算法拟合出飞行器姿态,然后通过STM32F103RBT6芯片分别控制4个电机驱动模块,即时通过PID算法输出PWM值进行调速来实现飞行姿态的稳定和改变。
建模系统通过控制GPS模块,可以获取飞行器的实时位置;飞行器通过图像采集模块,可以获取飞行器的环境信息。
设计了上位机软件,能够接收图像并且进行单目稠密重建。
稠密重建主要由从运动到结构、基础表面构建、约束场景流稠密重建、稠密对齐和局部模型集成共五方面组成,然后通过无线串口与无人机通讯,实现无人机的智能自主飞行。
实验结果表明,该系统能够实现单目建模的功能。
%In order to realize autonomous flight,monocular dense reconstruction and auto navigation of four rotors UAV,the monocular reconstruction and modeling system is designed. The flight controller uses six axis sensors,MPU-6050,to detect the attitude of the four rotors UAV;the speed of the 4 motor drive module is controlled by the STM32F103RBT6 chip to change the attitude of the UAV with PID algorithm. The monocular reconstruction system acquires real-time position and environment information of the UAV by controlling the GPS module and image acquisition module. The software on PC can receive the images and make monocular dense reconstruction. Dense reconstruction contains five main part including structure from motion,basic surfaceconstruction,constrained scene flow dense re-construction and local modelintegration. The intelligent autonomous flight of UAV is realized through communications between the PC and the UAV with wireless serial port. Experiments show that the system can realize monocular dense reconstruction.【期刊名称】《计算机技术与发展》【年(卷),期】2016(026)007【总页数】5页(P104-108)【关键词】四旋翼无人机;智能导航;三维重建;姿态控制【作者】庄晓明;李涛;付龙【作者单位】中科院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中科院合肥物质科学研究院先进制造技术研究所,江苏常州 213164;中科院合肥物质科学研究院先进制造技术研究所,江苏常州 213164【正文语种】中文【中图分类】TP302四旋翼无人机具有垂直起降、自由悬停的特点,并且体积小,操控方便,携带方便,可以进入人不易进入的复杂环境。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引
言
1 系统的总体设计
四旋翼飞行器使用无刷电机取代传统的有刷电机 , 很 大程度上增强了飞行器的稳定性。无刷电机有效率高、 转 速快、 噪音低、 稳态转速误差小、 没有电火花产生等优点。 控制系统主要由飞行控制系统、 无刷电机驱动模块、 导航 控制系统组成。控制系统的原理框图如图 1 所示。飞行 控制系统主控芯片采用 AVR 单片机, 可实现对三轴加速 度、 三轴角速度等数据的测量, 从而完成对飞行姿态的有 效控制。飞行控制部分采用 PID 算法和四元数算法来调 整和保持飞行器正常的飞行姿态, 并对采集回的传感器测 量值进行相应的软件滤波, 消除传感器的有害测量值对飞 行控制的影响。导航部分采用 1 种能够精确校准系统误 差的辅助手段修正主导航 系统的方法来提高导 航精度。 软件部分还采用了卡尔曼滤波方法来提高自主导航的精 度。该系统可以在上位机上规划航行 , 通过无线通信方式 将规划的路径传输给飞行器 , 导航系统经过路径分析后开 始执行自主巡航任务[ 2] 。
4 结
论
基于无人机的导航系统近几年来在军事、 民用领域中 得到广泛应用, 但是在四旋翼无人机上很少应用。本文以 四旋翼飞行器为平台, 应用全球定位系统和捷联惯导 U KF 的雷达与 ESM 误差配准技术研究
[ 13] 王伟斌 , 路辉 , 郎荣玲 . 基于二分 法的雷达高度表灵敏 度测试方 法 优 化 研 究 [ J ] . 电 子 测 量 与 仪 器 学 报 , 2009, 23( 4) : 28 32. [ 14] [ 15] 王洋 , 曲长文 , 蒋波 . 低轨星座对 自由段空间目标跟踪 算法研究 [ J] . 电子测量技术 , 2009, 32( 5) : 157 160. 夏家和 , 秦永元 , 赵长山 . 适用于 低精度惯导的非线性 对准 方 法 研 究 [ J] . 仪 器 仪 表 学 报 , 2009, 30 ( 8) : 1618 1622. 作 者 简 介
Intelligent navigation system based on four rotor micro UAV
Zhan Lei He Renqing Xie Y ang L ong Y an
( W uhan U niver sit y of T echnology, W uhan 430070)
2. 2 导航系统设计 该四旋翼飞行器能够沿着规划的航迹飞行, 并拥有返 回初始位置的功能。导航系统主要由导航控制模块、 GPS [ 5] 模块和电子罗盘组成 。该系统使用能精确修正系统误 差的辅助手段对主导航系统进行修正来提高导航精度。 导航控制模块因为要对数据进行滤波等大量复杂的运 算, 所以选用了处理能力较强的意法半导体公司 AMR7 系 列单片机 stm32f103。导航控制模块上有 1 个 SD 插槽, 用 于记录飞行器的飞行数据, 便于分析飞行器的而且可以作 为无人机飞行事故调查的数据来源。导航控制模块的主要 功能是将电子罗盘、 GPS 的数据进行软件滤波处理并计算 得出最优导航方案并控制飞行控制系统实现导航功能 [ 6] 。 2. 2. 1 GPS 模块 GPS 模块型号为 LEA 5T LEA5T 。它作为导航系统 的主要模块, 对导航精度及灵敏度起着十分重要的作用, [ 7] 必须使用高性能、 高可靠性的 GPS 定位模块 。本系统采 用高性能、 高灵敏度的 GPS 模块, 它有以下 3 个主要特点 : 1) - 160 dBm 的 SuperS ense 捕获和跟踪灵敏度; 2) 多径抑制智能化多径检测与抑制 ; 3) 热启动和辅助启动首次定位时间小于 1 s 。 2. 2. 2 电子罗盘( electronic com pass) 电子指南针发挥的作用与普通的机械指南针一样 , 不 同之处是电子指南针可以把获得的磁场数据传送给导航 控制模块, 从而协助校正导航系统的系统误差。本模块使 用的是价格低廉的 KM Z51 芯片。 3 块芯片各成 90 , 分别 测量空间 3 个方向的角度。 2. 3 无刷电机驱动 无刷直流电机 ( brushless DC motor) 因具有 快速、 可 控、 高效率、 高可靠性和体积小等优点 , 已经广泛应用于航 模领域。本模块采用反电动势法( BEM F) 对无刷电机的转 子的 位 置 进 行 检 测。 本 电 机 驱 动 模 块 使 用 At mel [ 8] AT mega48 作为控制芯片 。 本系统的无刷电机驱动电路主要包含三相全桥控制 电路、 反电动势过零检测电路和电流检测电路。三相全桥 驱动电路如图 3 所示。
Abstract: T his intellig ent nav igat ion system can achieve the four rot or U AV s autono mo us flig ht . U se A T M EGA 644 as t he flig ht contro ller. U se gy ro sco pes and three ax is accelerat ion sensor s to detect the a ircr aft attitude which can be co ntr olled by t he BL DC moto r dr iver modules. U se A RM 7 to contro l the GP S and the electr onic com pass module, get t he v ehicle s r eal time locatio n. U se so ftwar e filtering to impro ves the localization accur acy . A PC softw are is designed w hich can load t he digital map and set the flight path. Co mmunicate with the U AV by the wireless ser ial communicatio n mo dule t o driv e the U A V flight autonomo us. T he ex periment pro ved that the system can achieve intellig ent navig atio n featur es. Keywords: four r oto r micr o U A V ; att itude contro l; smart navig atio n; path planning; K alman filtering
感器相 结合的方式检测飞行器姿态 , 通过 A T M EG A644 芯 片分别 控制 4 个 电机驱 动模 块调 速来实 现飞 行姿态 的改 变。导航系统通过 AR M 7 控制 GP S 模块与电子罗盘 , 获取飞行器的 实时位置 , 并利用 软件滤波的 方式提高 了定位精 度。设计了上位 机控制软件 , 可加载数字地图并且设置飞行 路线 , 通过无线串 口与无人机 通讯 , 实现无 人机的 智能自 主飞行 。通过实 验证明该系统能够实现智能导航的功能。 关键词 : 四旋翼 无人机 ; 姿态控制 ; 智能导航 ; 路径规划 ; 卡尔曼滤波 中图分 类号 : T P2 文献标识码 : A
四旋翼飞行器 ( quadrot or) 有 4 个旋转的螺旋桨 , 前后 螺旋桨顺时针方向旋转 , 左右螺旋桨逆时针方向旋。同时 2 个轴向马达反向旋转方式抵消彼此转矩, 从而使四旋翼 飞行器能在空中保持悬停。前后螺旋桨推力的差别产生 俯仰动作, 翻滚动作由左右螺旋桨推力的差别产生; 通过 改变四旋翼 2 个轴向的转速来实现自旋。在控制四旋翼 飞行器飞行时 , 只能通过控制飞行器的 4 个旋翼的升力来 改变它的飞行姿态 , 所以这是 1 个欠驱动模型。四旋翼飞 行器飞行噪音小、 飞行 稳定、 机动性强 , 应用 前景十分广 阔 , 可以应用在电力寻线、 国土勘测、 防洪救灾、 森林防火 等领域。在四旋翼飞行器高空飞行时, 操控人员无法实时 了解飞行状态, 需要 1 套稳定精确高的智能导航系统协助 飞行。该领域的研究仍处于起步阶段[ 1] , 现阶段四旋翼无 人机的进一步的工作仍在继续, 最终目标是实现自主飞行 和多飞行器集阵列飞行。
1
第 34 卷
电
子
测
量
技
术
图1
控制系统的原理 图 2 惯性测量单元电路
2 系统硬件设计
2. 1 飞行控制系统设计 飞行控制模块集成了微型陀螺仪、 加速度传感器、 大气 气压传感器等单元。整个控制系统采用了 AT M EGA644 完成对各种传感器数据的采集、 运算处理、 飞行姿态稳定 控制和任务控制等功能 , 使机载控制系统根据控制算法处 理结果来调整姿态 [ 3] 。 大气压强传感器选用了 M PX6115, 在传感器模拟电压 输出处加上低通滤波器滤除杂波。由于传感器输出的模 拟量跟高度是成线性关系。 惯性测量单元如图 2 所示, 采用了美国模拟半导体公 司基于微电子机械技术的体积小、 重量轻的 3 个绝对值单 轴陀螺 传 感 器 A DXRS610 和 1 个三 轴 加 速 度 传 感器 L IS344ALH 组成 IM U 惯性测量单元, 用于检测系统的加 速度变化与角速度的变化。主控系统根据检测到的角速 度传感值和加速度传感器值 , 利用滤波器进行积分及补偿 运算估计解算得到姿态角, 减少单一利用陀螺仪测量造成 的累积误差 , 从而使控制系统实现四旋翼飞行器可靠的姿 态控制 [ 4] 。
2
詹
镭 等 : 基于微型四旋翼无人机的智能导航系统
第6期
图3
三相全桥驱动电路
3 系统软件分析
3. 1 姿态控制系统软件设计 整个四旋翼飞行器控制系统软件设计运用先进的飞 行控制算法结合高性能、 高可靠性的传感器, 使四旋翼的 飞行姿态控制高效、 稳定。 在姿态控制中 , 首先采集电子陀螺仪和三轴加速度传 感器的测量值, 并利用陀螺仪传感器在测量角速度时具有 良好高频特性和加速度传感器在测量角位移时良好低频 的特性 , 软件采用互补滤波器进行积分及补偿运算估计的 2 方法解算获得所需的姿态角, 通过 I C 总线控制各个电机 转速, 完成姿态调整。在各个模块上电后, 软件会对各部 分进行 1 次全 面检 查, 确 定没 有故 障后 才会 启动 无刷 电机。 3. 2 导航系统软件设计 导航系统采用 GPS 和惯性制导相结合的方式来提高 自主导航精度, 利用卡尔曼滤波算法对定位数据进行最优 估计。这种组合方式可以很好地避免因为短时间内无法 接收到 GPS 信号或者丢失定位信息时可以保持正确的航 行路线。但是惯导系统的误差有随时间发散的趋势 , 必须 要通过 GPS 定位系统校准惯导系统的累计误差[ 9] 。导航 系统软件流程图如图 4 所示。 3. 3 无线串口与上位机软件设计 整个飞行器通过远距离无线传输模块与远程上位机 控制平台进行通信 , 无线传输模块采用数据传输速率高的 xbee series 2 模块, 确保飞行数据能实时传回远程控制平 台。该上位机平台能显示出 系统的各种 参数, 如飞行速 度、 飞行器水平度、 飞行方向等 [ 10 12] 。 该上位机软件可以加载数字地图, 可在地图上设定飞 行器的飞行路线, 进行路径点规划。同时飞行器的实施位 置可以在地图上显示。上位机界面如图 5 所示。