直流无刷电机驱动技术的研究
电动车无刷直流电机驱动系统的设计的开题报告

电动车无刷直流电机驱动系统的设计的开题报告一、选题背景随着电动车技术的不断发展,电动车的使用越来越广泛。
当前市场上主要的电机驱动系统是直流电机驱动系统。
然而,传统的有刷直流电机存在电刷磨损等问题,而无刷直流电机可以避免这些问题,具有更高的效率和可靠性。
因此,本开题报告选取了电动车无刷直流电机驱动系统的设计为研究对象。
二、研究目的和意义本研究的主要目的是设计一种高效、可靠的电动车无刷直流电机驱动系统,并对其进行性能评估。
具体的研究目标如下:1. 了解无刷直流电机的原理及其优点;2. 设计一个电动车无刷直流电机驱动系统;3. 进行性能测试和评估。
本研究的意义在于提高电动车的效率和可靠性,减少电机维护成本,为电动车的发展做出贡献。
三、研究内容和方法本研究的主要内容包括以下三个方面:1. 研究无刷直流电机的原理及其特点;2. 设计电动车无刷直流电机驱动系统;3. 进行性能测试和评估。
为了达到以上研究目标和内容,采用以下方法进行研究:1. 文献资料法:阅读相关资料,了解无刷直流电机的原理及其特点,了解电动车无刷直流电机驱动系统的设计;2. 实验法:通过搭建实验平台,测试电动车无刷直流电机驱动系统的性能;3. 模拟法:采用MATLAB等软件模拟无刷直流电机的运行情况,验证设计方案的可行性。
四、研究进度安排本研究计划于2022年9月开始,于2023年6月完成。
具体研究进度如下:9月-10月:文献调研和资料收集;11月-12月:无刷直流电机的原理及其特点研究;1月-2月:电动车无刷直流电机驱动系统的设计;3月-4月:实验平台搭建;5月-6月:性能测试、数据分析和撰写论文。
五、预期研究成果本研究的预期成果为:1. 设计一种高效、可靠的电动车无刷直流电机驱动系统;2. 完成电动车无刷直流电机驱动系统的性能测试,对系统性能进行评估;3. 撰写一篇关于电动车无刷直流电机驱动系统的设计和性能评估的论文。
六、参考文献1. 许中杰. 无刷直流电机控制器在电动车上的应用研究[J]. 制造技术与机床, 2021(3):195-196.2. 徐峰, 刘志洋. 无刷直流电机技术在新能源汽车上的应用研究[J]. 车用发动机技术, 2021, 47(10):20-21.3. 王明珠, 刘德美. 无刷直流电机功率驱动控制技术的应用研究[J]. 电力科学与工程, 2020, 36(5):128-132.。
(毕业论文)永磁无刷直流电机论文
小功率永磁无刷直流电动机的设计和仿真研究摘要永磁无刷直流电动机是把电机、电子和稀土材料的高新技术产品发展紧密的结合在一起的新型电机,它具有单位体积转矩高、重量轻、转矩惯量小、控制简单、能耗少和调速性能好等优点,因而在航天航空、数控机床、机器人、汽车、计算机外围设备、军事等领域及家用电器等方面都获得了广泛的应用。
因此,设计性能优异的永磁无刷直流电机具有重要的理论意义和应用价值。
本论文系统的研究了35w小功率永磁无刷直流电机的本体设计,包括设计方法、有限元分析、性能计算、软件仿真等。
本文主要的研究内容如下:1、综述了永磁无刷直流电机的研究现状、存在问题和发展前景,分析了永磁无刷直流电机的基本理论。
2、建立永磁无刷直流电机的数学模型,先利用解析法对该电机进行电磁设计,然后利用有限元法对电机进行优化。
3、基于星形连接三相三状态的控制电路,利用Infolytic公司的MagNet电磁场分析软件建立了永磁无刷直流电机的有限元分析模型,仿真分析其静态气隙磁场分布及动态带负载时的电机特性。
并将软件仿真所得结果与设计计算结果进行比较分析,验证了设计方法的正确性。
关键词:电机设计,无刷直流电动机,有限元分析,稳态特性第一章绪论1.1永磁无刷直流电动机的发展状况永磁无刷直流电动机是一种新型的电动机,其应用广泛,相关技术仍然在不断的发展中,该类电动机的发展充分体现了现代电动机理论、电力电子技术和永磁材料的发展过程。
其中,永磁材料、大功率开关器件、高性能微处理器等的快速发展对永磁无刷直流电动机的进步功不可没。
1821年9月,法拉第建立的世界上第一台电机就是永磁电机,自此奠定了现代电机的基本理论基础。
十九世纪四十年代,人们研制成功了第一台直流电动机。
1873年,有刷直流电动机正式投入商业应用。
从此以后,有刷直流电动机就以其优良的转矩特性在运动控制领域得到了广泛的应用,占据了极其重要的地位。
随着生产的发展和应用领域的扩大,对直流电动机的要求也越来越高。
无刷直流电机的原理和控制介绍

无刷直流电机的原理和控制介绍contents •无刷直流电机概述•无刷直流电机的工作原理•无刷直流电机的驱动与控制•无刷直流电机的性能与优化•无刷直流电机的应用案例与发展趋势•总结与展望目录CHAPTER无刷直流电机概述01020304高效率长寿命低噪音高性能电动汽车航空航天家用电器工业机器人无刷直流电机的应用领域CHAPTER无刷直流电机的工作原理转子霍尔传感器或编码器定子电机的基本构造电机的工作原理详解电机以恒定转速运行,通过闭环控制系统保持转速稳定。
恒速模式调速模式正反转控制制动状态根据负载变化或其他控制需求,通过改变定子绕组电流的频率和幅值,实现电机转速的调节。
通过改变定子绕组电流的相序,实现电机的正转和反转。
当电机需要停止时,可以通过短路定子绕组或反向通电等方式实现快速制动。
电机的工作模式与运行状态CHAPTER无刷直流电机的驱动与控制电机驱动电路的基本构成功率电子器件01控制芯片02电源和保护电路03六步换相法通过脉宽调制(PWM)技术,可以调整绕组的通电时间,从而实现电机转速的连续调节。
PWM控制传感器反馈控制电机控制策略与算法先进的电机控制技术场向量控制(FOC)直接转矩控制(DTC)智能控制技术CHAPTER无刷直流电机的性能与优化电机性能参数介绍转矩转速效率功率密度电机的性能优化方法磁场设计优化散热设计优化智能控制算法利用智能控制算法,如神经网络、遗传算法等,可以学习和优化控制规则,实现更加智能化的电机控制,提升性能和适应性。
现代控制理论应用应用现代控制理论,如自适应控制、鲁棒控制等,可以实时调整控制参数,提高电机的抗干扰能力和适应性。
预测控制技术通过引入预测控制技术,如模型预测控制(MPC),可以实时预测电机的未来行为,并优化控制决策,提高电机的动态响应和稳定性。
电机控制算法的优化与改进CHAPTER无刷直流电机的应用案例与发展趋势典型应用案例分析电动汽车航空航天工业自动化1 2 3高性能化智能化绿色化无刷直流电机的发展趋势技术挑战无刷直流电机的技术门槛较高,如何降低成本、提高生产效率,同时保持高性能是未来的技术挑战。
无位置传感器直流无刷电机控制的研究
护程 序 ,旁路 电阻 R 7主要 用来 对 电路 电流 进行 采
作吉简介:庄乾成 (9 7 17 一) ,男,讲 师,硕士研究生 ,研究方向为智能仪器与测控技术 。 [ 8 第3 卷 91 3 第8 期 2 1— ( ) 01 8下
l
匐 化
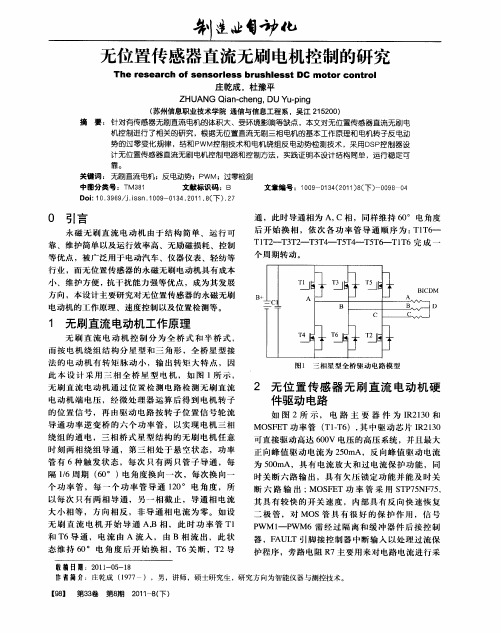
图 2 无刷 直 流 电机 驱 动 电路 示 意 图
个 周期 转动 。
B
1 无刷直流 电动机 工作原理
无 刷 直 流 电动 机 控 制 分 为 全 桥 式 和 半 桥 式 , 而按 电机 绕 组 结 构 分星 型 和三 角形 ,全桥 星型 接 法 的 电动 机 有 转 矩 脉 动 小 ,输 出转 矩 大 特 点 , 因 此 本 设 计 采 用 三 相 全 桥 星 型 电 机 ,如 图 l所 示 ,
为 50 0 mA,具 有 电流 放 大 和过 电流 保 护 功 能 ,同
管 有 6种 触 发 状 态 ,每 次 只 有 两 只 管 子 导通 ,每
隔 1 / 期 (0 6周 6 。)电角度 换 向一 次 ,每 次换 向一
个 功 率 管 ,每 一 个 功 率 管 导 通 10 电 角度 ,所 2。
样 ,阻值 为 4 Q, 转 化为 电压 信 号后 需 经过 放大 8 其
一
无 刷 直 流 电 动机 通 过 位 置 检 测 电 路 检 测无 刷 直 流
图 1 三 相 பைடு நூலகம் 型 全桥 驱动 电路 模 型
电动 机端 电 压 ,经 微 处 理 器 运 算 后得 到 电机 转 子 的 位 置 信 号 ,再 由驱 动 电 路 按 转子 位 置 信 号 轮 流 导 通 功 率逆 变桥 的六 个 功 率 管 ,以实 现 电机 三 相 绕 组 的通 电 ,三 相 桥 式 星 型 结构 的无 刷 电机 任 意 时 刻 两 相 绕 组 导通 ,第 三 相 处 于 悬 空 状 态 ,功 率
三相无刷直流电机驱动电路

三相无刷直流电机驱动电路三相无刷直流电机驱动电路是一种常用于工业和家电领域的电机驱动方案。
相比传统的有刷直流电机,无刷直流电机具有更高的效率、更低的噪音和更长的使用寿命。
本文将介绍三相无刷直流电机驱动电路的原理、特点以及应用领域。
一、无刷直流电机的原理无刷直流电机是一种基于电子换向技术的电机,其工作原理类似于传统的有刷直流电机。
无刷直流电机由转子、定子和电子换向器三部分组成。
转子是由永磁体组成的,定子则是由多相绕组组成的。
电子换向器根据转子位置和速度信息,通过控制电流的方向和大小,实现电机的高效运转。
三相无刷直流电机驱动电路主要由功率电子器件、驱动电路和控制器三部分组成。
功率电子器件通常采用IGBT(绝缘栅双极型晶体管)或MOSFET(金属氧化物半导体场效应晶体管),用于控制电流的通断和方向。
驱动电路负责产生适当的驱动信号,将控制器输出的信号转化为功率电子器件所需的控制信号。
控制器是电机控制系统的核心,负责根据转子位置和速度信息,产生适当的控制信号,并将其送至驱动电路。
三、三相无刷直流电机驱动电路的特点1. 高效率:无刷直流电机由于无需通过电刷和换向器,减少了能量损耗,提高了电机的效率。
在工业和家电领域,高效率是提高设备性能的关键因素之一。
2. 低噪音:无刷直流电机在工作过程中,没有机械接触和摩擦,因此噪音较低。
这使得无刷直流电机在一些对噪音要求较高的场合得到了广泛应用,比如家电领域的洗衣机和吸尘器等。
3. 高可靠性:由于无刷直流电机没有电刷和换向器等易损件,因此具有更长的使用寿命和更高的可靠性。
这使得无刷直流电机在一些对设备寿命要求较高的场合得到了广泛应用,比如工业自动化领域的机床和机械手等。
4. 精确控制:由于控制器可以根据转子位置和速度信息进行精确控制,因此无刷直流电机具有较好的速度和转矩响应特性。
这使得无刷直流电机在一些对运动控制要求较高的场合得到了广泛应用,比如机器人、无人机和电动汽车等。
直流无刷电机工作原理
直流无刷电机工作原理
直流无刷电机是一种靠磁场作用驱动转子转动的电机。
它与传统的直流有刷电机相比,无刷电机没有碳刷和换向器,因此具有更高的效率、更低的噪音和更长的寿命。
直流无刷电机的工作原理是利用电子换向器控制转子磁场的方向和大小。
电子换向器中包含了一些功率晶体管,这些晶体管根据转子位置感知器提供的反馈信号,来控制转子绕组的电流方向和大小。
换向器会按照事先设定的转子转动模式,定时地改变转子绕组的电流方向,从而产生一个沿着转子轴线旋转的磁场。
同时,转子上的永磁体也会产生一个自旋的磁场。
当换向器控制转子绕组电流方向与转子上永磁体的磁场方向相互作用时,就会产生一个电磁力,驱动转子转动。
根据不同的换向模式和控制算法,可以实现不同转速和转矩的调节。
直流无刷电机的控制系统通常包括一个传感器来感知转子的位置,一个电子换向器来控制绕组电流的方向和大小,以及一个微处理器来处理反馈信号和控制转子运动。
这样的控制系统可以实现精确的转速控制,以满足不同应用对电机运行的要求。
总的来说,直流无刷电机通过控制转子绕组电流的方向和大小,以及与转子上永磁体的磁场相互作用,从而实现转子的旋转。
它的工作原理简单而高效,使得它在许多应用领域中得到广泛应用。
无刷电机驱动原理
无刷电机驱动原理
无刷电机是一种通过电子换向技术来实现转子转动的电机,与传统的有刷直流
电机相比,无刷电机具有结构简单、寿命长、噪音小、效率高等优点,因此在工业、家电、汽车等领域得到了广泛的应用。
而无刷电机的驱动原理是实现无刷电机正常运转的基础,下面我们将详细介绍无刷电机驱动原理。
无刷电机的驱动原理主要包括电子换向技术、传感器和控制器三个方面。
首先,电子换向技术是无刷电机驱动的核心。
传统的有刷直流电机是通过机械
换向来实现转子的正常转动,而无刷电机则是通过电子换向技术来实现。
电子换向技术利用电子器件来控制电流的通断,从而实现对转子磁场的控制,使得转子能够按照一定的顺序旋转,从而实现电机的正常工作。
其次,传感器在无刷电机的驱动过程中也起着至关重要的作用。
传感器可以实
时监测转子的位置和速度,并将监测到的信号反馈给控制器,从而控制器可以根据传感器的反馈信号来准确地控制电子换向技术,保证电机的正常运转。
最后,控制器是无刷电机驱动的关键。
控制器根据传感器反馈的信号来控制电
机的电流和电压,从而实现对电机的精准控制。
控制器通常采用专门的控制芯片或者是嵌入式系统来实现,通过对电机的电流和电压进行精确的控制,保证无刷电机的稳定运行。
综上所述,无刷电机的驱动原理主要包括电子换向技术、传感器和控制器三个
方面。
通过这些关键技术的协同作用,无刷电机能够实现高效、稳定的运行,广泛应用于各个领域。
希望本文对无刷电机驱动原理有所帮助,谢谢阅读。
一种国产无刷直流电机驱动电路的设计
一种国产无刷直流电机驱动电路的设计一、国产无刷直流电机驱动电路的基本原理说到电机,你一定会想起那些大大小小的电动工具、玩具车,甚至是家里的吸尘器吧。
今天我们要聊的,正是这些背后不显山不露水的“幕后英雄”——无刷直流电机。
你可能觉得它挺简单,但实际上它的工作原理可是经过了不少聪明脑袋的打磨。
无刷直流电机,顾名思义,就是没有刷子,简单明了。
传统的直流电机靠的是碳刷与换向器配合工作,而无刷电机则巧妙地通过电子换向,免去了碳刷的烦恼。
刷子磨损了,容易产生电火花,影响寿命和稳定性。
可这无刷的就不同了,少了这一步,运行更平稳,效率也更高。
说白了,电机的“心脏”没了“抖动”,自然运行得更加顺畅了。
如何控制这玩意儿呢?这就是我们今天要讨论的重点——电机驱动电路。
电机本身的工作原理就像是心脏在跳动,而驱动电路就是它的“大脑”,负责给电机指令。
比如说,电流多大,转速多少,反转不反转,这些都得靠驱动电路来操控。
没错,电机离开了电路,就像人没有大脑,啥都干不了。
二、驱动电路的组成和工作原理说到电路,这可得讲清楚了,不然你还真搞不懂它到底怎么工作的。
一个完整的驱动电路一般由几部分组成:电源、控制器、功率放大器和传感器。
嗯,这些听起来很“高大上”,其实就是几种基础的元件搭配在一起,负责让电机“听话”地转起来。
首先是电源。
电源就像是电机的“粮仓”,没有它,电机就没东西可吃,转不起来。
电池、直流电源都可以当电源,用来给电机提供需要的电压和电流。
接着是控制器。
它负责根据外部输入的信号,分析需要什么样的输出,进而控制功率放大器的开关。
好比一个聪明的指挥官,接到任务后迅速做出决策,指挥下属开始行动。
功率放大器的作用就是将控制器的低功率信号放大,变成电机能够使用的大功率信号。
可以想象成,控制器是个小小的指挥官,发出的信号很微弱,但功率放大器就像是个超级增音器,把信号放大到电机能听懂的程度。
最后是传感器,它的任务是实时监测电机的转速、位置、温度等数据,确保电机运行在安全和高效的状态。
履带装甲车辆采用永磁无刷直流电动机驱动研究
大的电脉冲功率 , 电传动能够提供这些电功率。
本 文 以某 型履 带 步 兵 战车 为 驱动 平 台 , 采用 永
磁无刷直流电动机控制系统作为其驱动系统 ( 车辆
传动 结构 如 图 1所 示 ) 重 点 对 电机 及 控 制 系统 进 , 行分 析 ( 电机 驱动结 构如 图 2所 示 ) 。
出采用永磁无刷直流 电动机控制系统作 为其驱动 系统 , 立 建 了无刷直流 电动机数字控制系统 的数学模 型 , 并将永磁无 刷
直流 电动机控制 系统在履带车辆 电传动 中进 行应 用 , 对应 用
情况进行 了试验及分 析 , 最后给 出了应用可行性结论 。 关键词 : 永磁无刷直流 电动机 ; 履带 车辆 ; 电传动
维普资讯
…
.
堕整 … . 皇
… … …பைடு நூலகம்… … …… … … … … …… … . :
…
履 带 装 甲车 辆 采 用 永 磁 无 刷 直 流 电动 机 驱 动研 究
廖 自力 , 马晓 军, 臧克茂 , 南明 颜
( 甲兵工程学院 , 装 北京 10 7 ) 00 2
文章编号 :04— 0 8 20 )8- 0 3- 3 10 7 1 (0 6 0 0 2 0
Ab t a t I h s p p r o c p n d a tg fee t c s r c :n t i a e ,c n e t a d a v a e o lc r n i t s s i n o l ay ta k d v h ce i a My e c n ev f r miso fmi t r rc e e il s n z d, o c i e o n a i a o t g p r n e t— ma n t b u h e s D tr a t d v n d p i ema n n g e r s ls C moo s i r e s i s se i p tfr a d, t e t a d l f r s ls tr y t m u o w r ma h ma i l s c mo e u h e s DC moo ob mir c mp trc n r l y tm se t b ih d, e ma e t c o o ue o to se i sa l e p r n n —ma n t s s g e b u h e sDC moo p l d i lc r r s si n o l a y r s ls t ri a p i n e e ti t s e c a miso f n mi tr i t c e e il , n x e me t a ay e n o cu in o a r k d v hc e a d e p r n , n s s a d c n lso ff - a i l e sbl y i gv n i i t s ie . i Ke wo d : e a e t—ma n t b u h e s D tr mi — y rs pr nn m g e r s ls C moo ; l i tr rc e e i l ; l cr r s s i n a y ta k d v hc e ee t c ta mis i n o
无刷直流电机驱动控制器的SOPC技术研究
无刷直流电机驱动控制器的SOPC技术研究作者:綦慧,雷杨杰来源:《现代电子技术》2010年第11期摘要:采用纯硬件方式设计了无刷直流电机驱动控制器,详细介绍控制器各模块的设计,包括速度PI和电流PI调节器、电流检测模块、位置与速度检测模块、PWM发生器和换相控制模块,使系统控制电路都集成在一片FPGA上,提高了系统的集成度、稳定性和可靠性,也使得系统容易修改升级。
软件仿真和实验结果均表明,该控制器的设计合理,运行稳定。
关键词:现场可编程门阵列(FPGA); 无刷直流电机; PI; PWM; Verilog HDL中图分类号:TP23 文献标识码:A文章编号:1004-373X(2010)11-0117-04SOPC Technology of Brushless DC Motor Drive ControllerQI Hui, LEI Yang-jie(Beijing University of Technology, Beijing 100124,China)Abstract: A brushless DC motor drive controller was designed by pure hardware approach.The design of each module of the controller is introduced,including the speed PI and current PI regulator,current detection module,position and speed detection module,PWM generator and commutation control module.The system control circuit is integrated on only one FPGA,the integration,stability and reliability of the system are improved,and the system is easy to be modified and upgraded.The simulation and experimental results indicate that the design of the system is reasonable, and the operation is stable.Keywords: filed programmable gate array(FPGA); brushless DC motor; PI; PWM; Verilog HDL无刷直流电机具有无电刷和换相火花,体积小,低噪声等诸多优点[1],广泛应用在当今的控制系统中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I
摘 要 随着现代电力电子技术的发展和永磁材料性能的不断提高,无刷直流电动机的系统在高性能运动控制领域越来越受到重视.无刷直流电动机既具有直流电动机运行效率高、调速性能好、无励磁损耗等诸多特点,又具备交流电动机的运行可靠、结构简单、维护方便等一系列优点,在国民经济各个领域的应用日益普及. 本文在对无刷直流电动机控制系统的发展及应用综述的基础上,详细的介绍了无刷直流电动机的基本结构、工作原理和运行特性,并给出了其数学模型.简述了无刷直流电动机的控制策略,并分析了无位置传感器控制技术的原理和方法.然后对无刷直流电动机双闭环控制系统的硬、软件设计作了详细论述.系统以 TI 公司的 TMS320LF2407 芯片为控制核心,分析了 PWM 信号的产生分配情况,给出反电动势过零点、速度及电流等检测电路设计,并以 IR2130 作为驱动芯片设计了无刷直流电动机的驱动电路,采用三段式起动方式来起动电动机.系统的软件采用模块化设计方法,主要包括初始化程序、起动子程序、换相子程序、ADC 中断服务程序等.最后运用 SIMULINK 建立了无刷直流电动机控制系统的仿真模型,并对给定实例进行仿真. 本论文所述无刷直流电动机控制系统的设计方案,可以获得良好的速度控制性能,而且 DSP 技术不仅使系统获得了高精度,高可靠性,还简化了系统结构.:
关键词:无刷直流电动机 PWM 控制 无位置传感器 仿真 II
Abstract With the development of power electronics technology and ceaseless advance of permanent magnet material, Brushless DC motor (BLDCM) is more and more attention in the field of high performance motion control. BLDCM has been widely used in the various fields of the national economy because this motor not only has the merit of the DC motor for high efficiency, good performance and no excitation loss etc. but also has the merit of the AC induction motor for reliable operation, simple structure and easy maintenance etc. On the basis of the summary for developments and applications of BLDCM control system,the thesis introduces the structure, running principle, operational characteristics and mathematical model of BLDCM. It outlines BLDCM control strategy, and discusses the principles and methods of the control technology with no position sensor detection. Then the hardware and software design of the double closed loop control system is dissertated in detail.The controller of the hardware of the system is built by using the TMS320LF2407 as the microprocessor. It analyses the formation of PWM signals and designs the circuit of BEMF-zero-crossing, velocity and current detection. This system chooses syllogism jump-start motor. Besides, the drive circuit of the BLDCM is designed with IR2130. System software is modular in design methods, Including initialization, starting, commutation subroutine, ADC interrupt service procedures. Finally, it established a BLDCM control system simulation model by SIMULINK, and simulate to the case model.
This thesis described the design options about BLDCM control system, III
It can get a good performance of Speed control; DSP technology enables the system has not only a high-precision,high reliability, also simplifies the system architecture.
Keywords:Brushless DC motor PWM No position sensor Simulation IV 目 录
第1章 概 述 .......................................................................................................... - 1 - 1.1 无刷直流电机的现状....................................... - 1 - 1.2 电无刷直流电动机的概况................................... - 2 - 1.2.1 无刷直流电动机的特点和应用 ......................... - 2 - 1.2.2 发展前景 ........................................... - 3 - 1.3 本设计的主要工作......................................... - 3 - 第2章 无刷电机控制系统分析 .............................................................................. - 5 - 2.1 无刷直流电动机的基本结构................................. - 5 - 2.1.1 电动机本体电动机本体 ............................... - 5 - 2.1.2 转子位置检测器 ..................................... - 6 - 2.1.3 电子换相 ........................................... - 7 - 2.2 无刷直流电动机的工作原理................................. - 7 - 2.3 直流电动机的PWM调速原理................................. - 9 - 第3章 无刷直流电机控制器硬件设计 ................................................................ - 10 - 3.1 无刷直流电动机双闭环调速系统............................ - 11 - 3.2 SPWM 控制技术........................................... - 12 - 3.2.1 SPWM控制的基本原理................................ - 13 - 3.2.2 SPWM的数学模型.................................... - 14 - 3.3 无刷直流电动机无位置传感器的检测方法.................... - 14 - 3.3.1 反电动势过零检测法 ................................ - 15 - 3.3.2 续流二极管间接检测法 .............................. - 16 - 3.3.3 反电动势积分法 .................................... - 16 - 3.3.4 反电动势三次谐波检测法 ............................ - 17 - 3.4 数字PID控制器及算法.................................... - 18 - 3.4.1 模拟PID控制原理 .................................. - 19 - 3.4.2 PID算法的数字实现................................. - 20 - 第4章 无刷直流电动机的 DSP 控制系统 ......................................................... - 23 - 4.1 DSP的结构和特点 ........................................ - 23 - 4.1.1 DSP在运动控制领域的应用........................... - 23 - 4.1.2 TMS320LF2407结构和特点............................ - 24 - 4.2 无刷直流电动机的DSP控制系统的设计...................... - 25 -