The Tesla Test Facility Injector Controls
TK-3
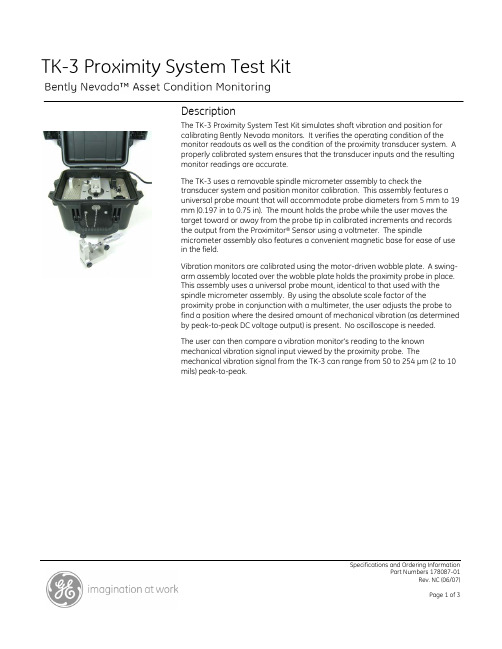
TK-3 Proximity System Test KitDescriptionThe TK-3 Proximity System Test Kit simulates shaft vibration and position forcalibrating Bently Nevada monitors. It verifies the operating condition of the Array monitor readouts as well as the condition of the proximity transducer system. Aproperly calibrated system ensures that the transducer inputs and the resultingmonitor readings are accurate.The TK-3 uses a removable spindle micrometer assembly to check thetransducer system and position monitor calibration. This assembly features auniversal probe mount that will accommodate probe diameters from 5 mm to 19mm (0.197 in to 0.75 in). The mount holds the probe while the user moves thetarget toward or away from the probe tip in calibrated increments and recordsthe output from the Proximitor® Sensor using a voltmeter. The spindlemicrometer assembly also features a convenient magnetic base for ease of usein the field.Vibration monitors are calibrated using the motor-driven wobble plate. A swing-arm assembly located over the wobble plate holds the proximity probe in place.This assembly uses a universal probe mount, identical to that used with thespindle micrometer assembly. By using the absolute scale factor of theproximity probe in conjunction with a multimeter, the user adjusts the probe tofind a position where the desired amount of mechanical vibration (as determinedby peak-to-peak DC voltage output) is present. No oscilloscope is needed.The user can then compare a vibration monitor’s reading to the knownmechanical vibration signal input viewed by the proximity probe. Themechanical vibration signal from the TK-3 can range from 50 to 254 µm (2 to 10mils) peak-to-peak.Specifications and Ordering InformationPart Numbers 178087-01 ArrayRev. NC (06/07)SpecificationsPower RequirementsElectric:95-125 Vac, 50/60 Hz, 1Aminimum190-250 Vac, 50/60 Hz, 1AminimumAir:90 psi (6.2 bar) maximumWobulator RangeVibrationAmplitudeRange:50 µm to 254 µm (2 to 10 mils)peak-to-peak.Maximum SpeedElectric:0 to 5000 cpm ± 1000 cpmAir:0 to 5000 cpm ± 1000 cpmSpindle Micrometer Range:0 – 25.4 mm (0 – 1000 mils).Target Button and Wobble Plate:AISI 4140 Alloy Steel.NOTE: Contact your nearest SalesProfessional for details on special targetand wobble plate materials. Physical SizeHeight:195 mm (7.68 inches)Width:299 mm (11.8 inches)Depth:248 mm (9.76 inches)Weight:5.22 kg (11.5 lb) EnvironmentalOperationalTemperatureRange0 °C to 54 °C (32 °F to 130 °F) StorageTemperatureRange-18 °C to 65 °C (0 °F to 150 °F) Humidity95% Non-Condensing Humidity ExposureDesigned to meet IP54 for dustand water exposure (closed)CE Mark DirectivesEMC Directives 2004/108/EC – with amendments IEC/EN61000-6-2Electrostatic DischargeEN61000-4-2 Criteria AElectro-Magnetic Field (RadiatedImmunity)EN61000-4-3 Criteria ASpecifications and Ordering InformationElectrical Fast Transient BurstEN61000-4-4AC Power Cable, Criteria BLine to Ground, Criteria BNeutral to Ground, Criteria BProtective Earth to Ground,Criteria BLine/Neutral/Protective Earth toGnd, Criteria BSurge CapabilityEN61000-4-5AC Power Ports, Criteria A Conducted ImmunityEN61000-4-6AC Power, Criteria AVoltage Dips and InterruptsEN61000-4-1140%, 10 Cycles (200 mS) Criteria A70%, 25 Cycles (500 mS) Criteria C0%, 250 Cycles (5 Sec), Criteria C IEC/EN61000-6-4Radiated EmissionsEN61000-6-4Conducted EmissionsEN61000-6-4Low Voltage DirectiveIEC/EN 61010-1 Ordering InformationElectric Driven TK-3e177313 – AXX – BXXA: Scale Units0 1 English0 2 MetricB:Power Cord Type0 1 American0 2 EuropeanAir Driven TK-3g177314 – AXXA: Scale Units0 1 English0 2 Metric Accessories107360-01REBAM® Verification Kit:This kit allows you to verify correctoperation of the 3300 REBAM®Transducer System.Kit includes:• 1 high resolution digitalmicrometer• 1 Adaptive spacer• 1 AISI E52100 Steel target buttonto simulate the outer ring of arolling element bearing. 168836MDS 100 – Data Acquisition CBT(Computer Based Training)ModuleBently Nevada, REBAM, and Proximitor are trademarks of General Electric CompanyCopyright © 2007. Bently Nevada, LLC.1631 Bently Parkway South, Minden, Nevada USA 89423Phone: 775.782.3611 Fax: 775.215.2873/bentlyAll rights reserved.Specifications and Ordering Information。
Ammonia test
Guideline to application for design qualification and typeapproval of photovoltaicmodules according tostandardsIEC 61701 and Ammonia testIEC 61701 Salt mist corrosion testing of photovoltaic (PV) modulesOur appointed laboratory is equipped to perform salt mist corrosion test with sodium chloride moisture. The salt spray test is a standardized test method used to check corrosion resistance of coated samples. Salt spray test is an accelerated corrosion test that produces a corrosive attack to the coated samples in order to predict its suitability in use as a protective finish.PROCEDURE: IEC 61701 for photovoltaic modules specify a test duration of 96 hours performed at 30°C of ambient temperature with a module inclination from 15 to 30°. The salt concentration is 5 parts in 95 parts of solution. Acceptance criteria are the same as IEC 61215 and no corrosion of modules parts that may influence the modules safety and functionality. The equipment is large enough to include a 1 x 2 meter module inside. Before and after the test the module is checked according to the following tests according to IEC 61215/IEC 61646 procedures and criteria:10.1 – visual inspection, 10.2 – maximum power determination, 10.3 ‐ resistance insulation and 10.15 – wet leakage current test.TIME REQUIRED FOR TEST: 2 WEEKSNUMBER OF SAMPLES: 2Resistance to AMMONIA (NH3 endurance test)Modules that are installed onto livestock farms and greenhouses are subjected to particular environmental conditions that may be very hostile: in particular fertilizing, ammonia and dust particles can develop. The concentration of ammonia, which is a harmful substance that is released into the air in large amounts on farms may be very high and these emissions can additionally increase aging (degradation) of the photovoltaic modules. Degradation leads to a lower energy yield and therefore a lower return rate for the operator of a photovoltaic system.PROCEDURE: the test conditions are to keep 2 modules into a special climatic chamber at a temperature of 70°C with 70% of relative humidity for a period of 1500 hours with a concentration of 750 ppm of NH3. The acceptance criteria is the same specified by IEC 61215/61646 and in particular:10.1 – visual inspection, 10.2 – maximum power determination, 10.3 ‐ resistance insulation and 10.15 – wet leakage current test. Moreover after the aging test a measurement at lower irradiance is performed to deeply investigate the behavior of the module.TIME REQUIRED FOR TEST: 11 WEEKSNUMBER OF SAMPLES: 3。
JESD47I中文版
JEDECSTANDARDStress-Test-Driven Qualification of Integrated CircuitsIC集成电路压力测试考核JESD47I(R evision of JESD47H.01, April 2011)JULY 2012JEDEC SOLID STATE TECHNOLOGY ASSOCIATIONNOTICEJEDEC standards and publications contain material that has been prepared, reviewed, and approved through the JEDEC Board of Directors level and subsequently reviewed and approvedby the JEDEC legal counsel.JEDEC standards and publications are designed to serve the public interest through eliminating misunderstandings between manufacturers and purchasers, facilitating interchangeability and improvement of products, and assisting the purchaser in selecting and obtaining with minimum delay the proper product for use by those other than JEDEC members, whether the standard is tobe used either domestically or internationally.JEDEC standards and publications are adopted without regard to whether or not their adoption may involve patents or articles, materials, or processes. By such action JEDEC does not assume any liability to any patent owner, nor does it assume any obligation whatever to parties adoptingthe JEDEC standards or publications.The information included in JEDEC standards and publications represents a sound approach to product specification and application, principally from the solid state device manufacturer viewpoint. Within the JEDEC organization there are procedures whereby a JEDEC standard or publication may be further processed and ultimately become an ANSI standard.No claims to be in conformance with this standard may be made unless all requirements stated inthe standard are met.Inquiries, comments, and suggestions relative to the content of this JEDEC standard or publication should be addressed to JEDEC at the address below, or refer to under Standards and Documents for alternative contact information.Published by©JEDEC Solid State Technology Association 20123103 North 10th Street Suite240 SouthArlington, V A 22201-2107This document may be downloaded free of charge; however JEDEC retains thecopyright on this material. By downloading this file the individual agrees not tocharge for or resell the resulting material.PRICE: Contact JEDECPrinted in the U.S.A.All rights reservedJEDEC Standard No. 47IPage 5 5.5 Device qualification requirements (cont’d)STRESS DRIVEN QUALIFICATION OF INTEGRATED CIRCUITSIC集成电路压力测试考核(From JEDEC Board Ballot, JCB-12-24, formulated under the cognizance of the JC14.3 Subcommittee on Silicon Devices Reliability Qualification and Monitoring.)通过JEDEC委员会JCB-12-24号投票,在JC14.3硅晶圆器件可靠性考核和监控小组委员会审理后系统地阐述和制定1 Scope 范围This standard describes a baseline set of acceptance tests for use in qualifying electronic components as new products, a product family, or as products in a process which is being changed.这个文档描述了用于考核新产品、同族器件或工艺变更的可接受的基准测试标准These tests are capable of stimulating and precipitating semiconductor device and packaging failures. The objective is to precipitate failures in an accelerated manner compared to use conditions. Failure Rate projections usually require larger sample sizes than are called out in qualification testing. For guidance on projecting failure rates, refer to JESD85 Methods for Calculating Failure Rates in Units of FITs. This qualification standard is aimed at a generic qualification for a range of use conditions, but is not applicable at extreme use conditions such as military applications, automotive under-the-hood applications, or uncontrolled avionics environments, nor does it address 2nd level reliability considerations, which are addressed in JEP150. Where specific use conditions are established, qualification testing tailored to meet those specific requirements can be developed, using JESD94 that will result in a better optimization of resources.这些测试用于加速和诱发半导体器件和封装的失效。
Operation Manual

Operation ManualTeam 12Development of Hammer Blow Test to Simulate Pyrotechnic ShockMembers:LuisLopez(*************.edu)MaxMecabe(************.edu)TiffanyShaw(*************.edu)JustinVigo(*************.edu)SarahWyper(*************.edu)Faculty Advisor:Dr.RajanKumar(**************)Sponsor: Harris CorporationRobertWells(*******************)Instructors:Dr.NikhilGupta(***********.edu)Dr.ChiangShih(************.edu)4/1/16Table of ContentsTable of Figures* (iii)Table of Tables* (iv)Acknowledgements (v)Abstract (vi)1. Functional Analysis (1)2. Project Specification (2)3. Product Assembly (2)4. Operation Instructions (4)5. Troubleshooting (9)6. Regular Maintenance (10)7. Spare Parts/Inventory (10)References (12)Appendix (13)Figure 1 –CAD Assembly of Test Device (3)Figure 2 – Partial Exploded View of Test Device (3)Figure 3 – Flowchart of DAQ Hardware Setup (4)Figure 4 – Adding a DAQ Assistant (5)Figure 5 – Selecting the Signal (5)Figure 6 – Selecting an Input Channel (6)Figure 7 – Channel Specific Configuration Page (6)Figure 8 – Block Diagram of LabView Program (7)Figure 9 – LabView User Interface (7)Figure 10 – Creating a Control Block in LabView (8)Figure 11 – MATlab Program to Generate SRS Curves (9)Figure 12 – Table and Image of Spare Parts from Team 15 Last Year (11)Table 1 – Dimensions and Specifications of Components (2)Table 2 – Problems and Possible Solutions for Shock Simulation (10)AcknowledgementsThe members of Team 12 would like to express our great appreciation to our sponsor, Harris Corporation and the FSU-FAMU College of Engineering faculty; this project would not be possible without their help. We would like to thank Mr. Robert Wells, Ms. Sarah Cooper, and Mr. Giann Cornejo at Harris for providing this project and for their contributions of both time and resources to help us get pointed in the right direction. We would also like to acknowledge our faculty advisor, Dr. Kumar for his guidance and allocation of important resources. Lastly, our senior design instructor, Dr. Gupta, and Dr. Shih for helping us with the planning and execution of this design task.ABSTRACTIn order to ensure safety and a properly functioning system, thorough tests need to be done on every operational part. This is especially true for systems that encounter and make use of pyrotechnic shock. Many advanced systems use controlled explosive devices to accomplish tasks. Examples include rocket separation, pilot ejection, and air bag deployment. During these events it is critical that the components involved with the explosion and those surrounding it, especially the electronics, maintain functionality. This project aims to improve upon the pyrotechnic shock testing system that currently exists at Harris Corporation. A hammer blow impact test device has been built by a previous design team, but the resulting data lacked consistency and repeatability which provided little insight. The goal of this year’s team is to capitalize off of the work of the previous design team while also implementing the necessary design changes in order to produce a repeatable pyroshock test that can be used to gain further understanding of the variables involved with pyroshock testing. To accomplish this several design changes were proposed and analyzed. The appropriate design changes that should be implemented consist of: a bearing hinge at the hammer pivot point, decoupling the frame and plate using a suspension system, stabilizing the entire device via anchoring, and making use of an electromagnetic release mechanism. So far the device has been anchored and the pivot has been replaced. The next steps in the project include trying to obtain repeatable results while also looking into electromagnetic release mechanisms and decoupling of the strike plate. Once repeatable results are obtainable, tests will be run in order to determine how variables affect SRS curve results.1.Functional AnalysisThere are two major aspects to this project, and each is necessary to gather the desired data. The first, the Data Acquisition System (DAQ) is crucial for proper data collection and will be described more in depth later in this manual. The second is the physical hammer blow test. The device was originally built last year and minor changes for repeatability improvement have been made this year, but the basic operation stays the same. The procedure for running a test is listed below.1.With the assumption that the apparatus is assembled and anchored down, tighten allconnections, especially those associated with the strike plate using the torque wrench.2.Attach the accelerometer to the back side of the strike plate (opposite of where the hammerswings), and screw into one of the nine threaded holes depending on desired test location.Ensure secure attachment. Accelerometer will protrude out to front side of plate.3.On front side of apparatus, adjust hammer arm to match desired strike location by looseningpivot and sliding left or right. Tightened at desired location.4.Attach hammer block on hammer arm. Slide to desired height and tighten. Attach hammersphere to hammer block. Tighten and ensure impact will not hit accelerometer directly.Strike location should be slightly off axis from accelerometer position to protect that equipment.5.Set up DAQ and LabView (see below).6.One person should be running LabView and another should be dropping the hammer. Thehammer should be dropped from a desired height simultaneously as the LabView program is running.7.Process collected data to create SRS curves (raw collected data → excel → MAT lab).It is important to note that all attachment points should be tightened after each test run, especially after the hammer drops from the top height. Loose screws can heavily affect the data in terms of both repeatability and desired results. The current strike plate can be used to test various different locations. The strike location is almost limitless because of its ability to be adjusted both vertically and horizontally. The accelerometer is limited to nine different locations drilled to follow the grid system of the plate already.2.Project SpecificationTable 1 shows crucial components and their respective dimensions. Data sheets for the data acquisition equipment are in the Appendix.Table 1- Dimensions and Specifications of ComponentsComponent Dimensions/SpecificationsFrame34”x 34”x 26”, T-slotted Al6061Strike plate31.63”x 31.63”x 0.19”, Al6061Hammer Block3”x 4”x 3”, Al6061Hammer spheres, various sizes 1-7/8”, 1-3/8”, 1”, 3/4”, Stainless steelDAQ NI USB-6211, 16-bitAccelerometer Dytran Model 3086A4TSignal Conditioner PCB Piezotronics Model 482A21Current Source Power Unit Dytran Model 4110C3. Product AssemblyFigure 1 shows the CAD assembly of the test device. Figure 2 displays a partially exploded view. It can be seen that that the hammer sphere attaches to the hammer block which attaches to the hammer arm. With a pivot attached to the top inner frame bar, the hammer arm connects to the frame. The strike plate is attached to the frame using four L-brackets at the corners of the plate. For viewing purposes, only some of the frame is exploded, but all bars of the frame are separate bars that attach in the same way.Fig. 1- CAD assembly of test device Fig. 2- Partial Exploded View of Test Device4.Operation InstructionsThe operating procedure for the running the physical test device was listed earlier. It is necessary to further explain the data acquisition system for users to be successful in running tests.Data Acquisition OperationThe data acquisition system consists of various items in order to collect and record proper data. A list of this equipment is written below. Figure 3 explains the correctly ordered setup of this equipment, which is essential to proper data collection.1.Accelerometer and attached cable with BNC connector2.ICP signal conditioner/line filter and power cable3.Current limiting power supply4.Two BNC cables (1 needs stripped wires showing positive and negative ends to connect toDAQ)B DAQ6.National Instruments LabView software installed on a computerFig. 3 - Flowchart of DAQ Hardware SetupThe next step is to build the LabView program, to read the signal output by the accelerometer. In this case, the output being read is in the form of voltage. This works well with LabView due to the easy to use DAQ Assistant. This feature allows a new user to quickly and easily setup a voltage based data acquisition system.1.From the block diagram window, open the functions palette (right click white background)2.Go to Express →Input →DAQ Assistant and drag the DAQ Assistant icon onto the blockdiagram and wait for it to automatically launch a wizard-style walkthrough (Figure 4).3.Open the Acquire Signals drop down list.4.Open the Analog Input drop down list and select Voltage (Figure 5).a.This screen shows the supported DAQ cards installed and their associated channels.Check the DAQ Connector box and select the appropriate Card and Channel andpress Next (Figure 6).5.The next window is the Configuration window (Figure 7).a.Here is where you set the Signal input Range, Scaling, Timing Settings, andTerminal Configuration.6.For this project, these settings have the following Values.a.Max: 10, Min: -10, Scaled Units: Volts, Terminal Configuration: “Let NI-DAQChoose”, Custom Sc aling: No Scale, Acquisition Mode: N Samples, Samples toRead: 50000, Rate (Hz): 50000.Fig. 4 - Adding a DAQ AssistantFig. 5 - Selecting the SignalFig. 6 - Selecting an input channelFig. 7- Channel specific configuration pageFurther development was done within LabView in order to output the data to both an on-screen graph, as well as a text file for further processing. Figure 8 shows the full block diagram and Figure 9 displays the interface screen of the program.Fig. 8 - Block diagram of LabView ProgramFig. 9 - LabView user interfaceThe LabView blocks are created by right-clicking the various tools in the in the Data Acquisition Assistant and making control blocks. Figure 10 shows an example of creating a control block fromthe Data Acquisition Assistant. Outputting to a file was done by first outputting the data to an array, then transposing this array into columns, and passing this array to a text file that will be given a name through the dialogue box on the interface. The data can also be obtained by right-clicking the data in the user interface and exporting directly to Microsoft Excel.Fig. 10 - Creating a control block in LabViewAfter exporting the raw data (time and voltage) to Excel, a conversion factor must be used before importing that data into MATlab. All voltages should be multiplied by 1919.386. From there, the MATlab codes, provided by last year’s team and written by Tom Irvine, can be used to generate SRS curves. Figure 11 shows the running code with the proper answers to the given prompts. It is important that Q=10, but the prompts about plot formatting is based on what the user desires.Fig. 11- MATlab Program to Generate SRS Curves5. TroubleshootingWith so many variables affecting the data and various pieces of equipment needed to collect said data, issues are bound to arise. Table 2 lists some problems that may occur and possible solutions to rectify them.Table 2- Problems and Possible Solutions for Shock Simulation Problem Possible SolutionsNoisy Data Ensure DAQ is properly grounded and all connections are secure.Ensure the accelerometer is tightened down. Check that all screws and nuts are tightened.Hammer Impact Not Consistent Make sure pivot is not too tight.DAQ Not Being Recognized by the Computer Make sure proper drivers are installed Make sure the professional version of LabView is being used.6.Regular MaintenanceRegular maintenance of the test device should include tightening of all attachments after each test run. This is to ensure not only repeatable data, but also safety. Also, it is important to check the data acquisition equipment to make sure all is running correctly. Other than that and general inspection of the strike plate for fractures or crack, the test apparatus does not require too much maintenance.7.Spare PartsFigure 12 shows the table of spare parts from the team last year and an image of said parts. All of those things are still part of the inventory, and most of them will not be used. Specific to this year, the test article mounting plate has now become a spare part as well since it is no longer being used and the accelerometer is being mounted directly to the strike plate.Fig. 12- Table and Image of Spare Parts from Team 15 Last YearReferences1. DeMartino, Charles, Chad Harrell, Chase Mitchell, and Nathan Crisler. Operations Manual. Senior Design Team 15. Web. 3 April. 2015.</me/senior_design/2015/team15/Operations_Manual_Final.pdf>.1. DeMartino, Charles, Chad Harrell, Chase Mitchell, and Nathan Crisler. Impact Testing and Pyrotechnic Shock Modeling Final Report. Senior Design Team 15. Web. 10 April. 2015.</me/senior_design/2015/team15/Final_Report_Team15.pdf>.2. We lls, Robert. “University Capstone: Development of Hammer Blow Test Device to Simulate Pyrotechnic Shock (Second Year Project).” 14 Aug. 2015.AppendixNational Instruments DAQ USB-6211Dytran Accelerometer Model 3086A4TPCB Piezotronics Signal Conditioner Model 482A21Dytran Current Source Power Unit Model 4110C。
ISO3080中文资料

Vcc1 1 GND1 2
R3 RE 4 DE 5
D6 GND1 7 GND1 8
16 Vcc2
5
DE
15 GND2
14 nc 13 B
6 D
12 A
3 R
11 nc
RE 4
10 GND2
9 GND2
13 B
12 A
1
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
JEDEC Standard 22, Test Method C101
Bus pins and GND1 Bus pins and GND2 All pins
All pins
Machine Model
ANSI/ESDS5.2-1996
Maximum junction temperature
VALUE –0.3 to 6 –9 to 14 –50 to 50 –0.5 to 7
(2) All voltage values except differential I/O bus voltages are with respect to network ground terminal and are peak voltage values
RECOMMENDED OPERATING CONDITIONS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
The Tesla Test Facility Injector ControlsF. Gougnaud, J.F. Gournay, Y. LussignolCEA-Saclay DAPNIA/SIG 91191 Gif/Yvette France
1. INTRODUCTION The goal of the Tesla Test Facility (TTF) project is to demonstrate the feasibility of a largesuperconducting positron electron collider. The collaboration includes several European and Americanlaboratories. TTF is a linear accelerator with four cryomodules of eight cavities. The aim is to reach 500Mev with a gradient of 15 MV/m. TTF will be installed at DESY. The Injector has been built by LAL(Orsay) and DAPNIA (Saclay) including its controls. There was an agreement between us and DESY inFebruary 1993 to use EPICS for the injector controls [1]. This paper will present the architecture and thehardware of the system, the EPICS drivers, the EPICS tools used and some specific tools we havedeveloped.
2. INJECTOR OVERVIEWThe TTF Injector comprises an electron gun with a high voltage system, a subharmonic buncher,two beam transport lines with magnetic lenses, triplets, dipoles and steerers. It also includes asuperconducting capture cavity and a klystron modulator [2]. Different beam diagnostics are used : beamposition monitors, beam pulse intensity monitors, a SEM-grid beam profiler, view screens and an opticaltransition radiation monitor.
3. HARDWAREThere are 4 dedicated VME crates (IOC in EPICS vocabulary) : one for the gun, one for the beamlines, one for the beam diagnostics and one for the capture cavity and the modulator. The CPUs in theVME crates are Motorola MVME162LX 222 (MC68040, 4MB DRAM). Most of the other VME boards arestandard industrial products. These include:
A/D boards ADAS ICV150 (12 or 14 bit)Fast A/D board OMNIBYTE COMETD/A boards ADAS ICV712 (12 bit)D/A boards ADAS ICV701 (16 bit)Binary Input /Output boards ADAS ICV196Stepping motor boards ADAS ICV914.
We chose ADAS boards because we have had good experience during the last years with theseboards [3]. Furthermore, the manufacturer has a complete set of hardware to interface the VME boards tothe equipment (isolated inputs/outputs, relay outputs, motor amplifier boards).
For SEM-grid and beam position monitors, the boards were designed by LAL. A programmabletiming system designed by Fermilab, comprising a rep-rate generator and IP timer modules [4], deliverssynchronization to the gun, the capture cavity and the diagnostics. Lastly, we use an ESRF-designed VMEboard for video switching [5].
4. EPICS DRIVERS We have received and installed EPICS during the summer of 1993. After that, the first importantstep was to develop a set of drivers for all the VME boards we planned to use. There were no majordifficulties in writing them, thanks to the EPICS manuals and to similar drivers which came with EPICS. Inaddition, discussions and E-mail exchanges with the original EPICS developers made the work easier.Initially, the standard structure consisting of a device and a driver layer was adopted as advised in thedocumentation [6]. But this structure was not always justified and we only kept it when necessary.Although this was probably obvious to the main collaborating laboratories, we didn’t get the informationand then wasted some time in reorganizing our drivers accordingly. This shows that even if a world-widesoftware sharing policy is very constructive, it may be difficult for a small, remote team to stay in phasewith the major laboratories involved in the life of the product.
Most of the drivers were easily written except for the stepping motor which involves asynchronousprocessing. This type of driver should not block the database during the processing. Consequently, thedriver puts the commands in a message queue. A readback task reads this queue, processes the commandson the VME board and allows the driver to hand the control back quickly to the database scanning tasks.The readback task updates the motor data in the database using a callback routine mechanism.
The free circulation of the EPICS source code is also a great advantage. For instance, the driver forthe COMET board was first written at Los Alamos. It was then extensively modified at DESY and finallywe made some minor enhancements to improve the software-event processing.
This gives some concern about the future life of our developments. As it is unlikely these driverswill be incorporated in the standard EPICS we will have to do this task each time we install a new release.
5. USE OF EPICS TOOLSOnce the drivers were written, the displays for the operator interface were designed rapidly. Weused MEDM (an EPICS tool that provides a graphical user interface) and KM (a tool assigning theSUNDIALS knobs to variables). Synoptic displays show the whole machine with diagnostics andmagnets (Fig. 1). Steerers and lenses can be controlled with the SUNDIALS. The response times are verysatisfactory. MEDM has all the general functions necessary for a control system and is used for most of thedisplays: the RF capture cavity, the diagnostics, the timing... For the RF capture cavity, with its cold tuningsystem, the display shows the very complex automation of the RF loops (Fig. 2). This was the firstapplication delivered in June 1994. For the beam profiles, a MEDM display plots the raw data, the averagesmoothed data and shows additional information computed from the data.