TMS320F240DSP处理器在电动机微机保护装置设计中的应用
DSP智能电机保护器设计方案
封面作者:PanHongliang仅供个人学习基于DSP的智能电机保护器设计前言由于生产自动化及各种自动控制、顺序控制设备的出现,要求电机经常运行在频繁的起动、制动、正反传、间歇以及变负荷等各种方式。
电机的运行要求越来越高。
同时,由于电机与配套机械连在一起,当电机发生故障时,经常波及生产系统。
因此,对电机实行有效的保护是保证生产系统正常工作的一项重要任务。
随着科学技术的发展,电机保护装置中逐渐使用了电子保护装置。
在国外,目前电子保护装置已在电力系统和电机保护装置中获得了广泛应用,国内也开始推广 [1]。
电子保护装置的优点是:基本上由静止元件组成。
它动作速度快,不存在机械位移和磨损,精度和寿命一般均比有触点继电器高,耐冲击和振动,可靠性好。
另外,电子电路动作功率小,灵敏度高。
数字信号处理器(DSP) 具有流线型操作功能和单周期完成乘法的结构,由其组成的系统能实时进行频谱分析。
高速14位A/D转换器MAX126带多路开关和采样保持器,非常适用电机信号的采集。
为了实现对电机的可靠保护,提出了以TMS320LF2407的为核心,对过载、轻载、不平衡、断相、过压和欠压等常见故障具有综合检测保护功能的智能电机保护器。
1 系统基本原理和设计思想电机运行中常常会出现不正常的运行状态。
这些不正常的运行状态包括:过载、堵转、短路、轻载、不平衡、断相、过压、欠压和漏电。
电机保护是在检测三相电压UA、UB、UC,三相电流IA、IB、IC和漏电流IL的基础上做出的。
具体过程如下:(1) 设置各个参数,由PC机发出控制信号;(2) 采样三相电压、三相电流和漏电流,得到实时值;(3) 利用FFT算法对数据进行处理和计算,得到三相电压、电流的有效值、有功功率、无功功率以及功率因数;(4) 判断电机是否处于不正常的运行状态;(5) 通过RS-485接口把数据发送到显示部分,显示在LCD 上。
系统的硬件框图如图1所示。
CPU选用TI公司的TMS320LF2407,其丰富的硬件资源在系统中得到了充分的应用,加上少量的外围器件,就构成了一个功能完善、简便适用的系统。
DSPTMS320F240芯片引脚与功能
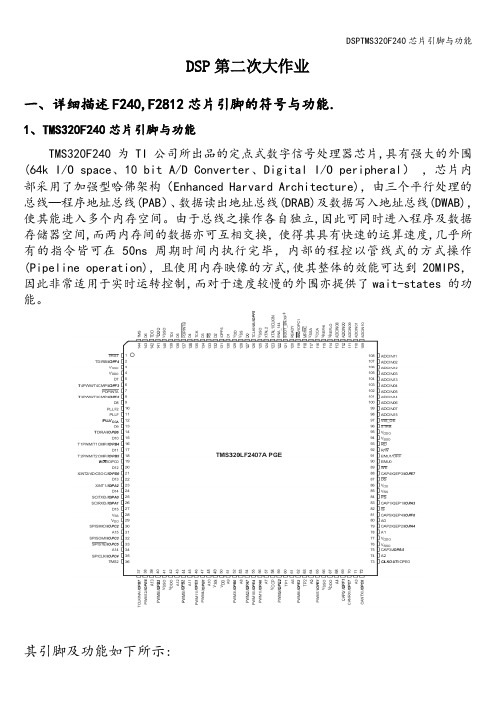
DSP第二次大作业一、详细描述F240,F2812芯片引脚的符号与功能.1、TMS320F240芯片引脚与功能TMS320F240为TI公司所出品的定点式数字信号处理器芯片,具有强大的外围(64k I/O space、10 bit A/D Converter、Digital I/O peripheral),芯片内部采用了加强型哈佛架构(Enhanced Harvard Architecture),由三个平行处理的总线─程序地址总线(PAB)、数据读出地址总线(DRAB)及数据写入地址总线(DWAB),使其能进入多个内存空间。
由于总线之操作各自独立,因此可同时进入程序及数据存储器空间,而两内存间的数据亦可互相交换,使得其具有快速的运算速度,几乎所有的指令皆可在50ns 周期时间内执行完毕,内部的程控以管线式的方式操作(Pipeline operation),且使用内存映像的方式,使其整体的效能可达到20MIPS,因此非常适用于实时运转控制,而对于速度较慢的外围亦提供了wait-states 的功能。
其引脚及功能如下所示:2、TMS320F2812芯片引脚与功能德州仪器所生产的TMS320F2812 数字讯号处理器是针对数字控制所设计的DSP,整合了DSP 及微控制器的最佳特性,主要使用在嵌入式控制应用,如数字电机控制(digital motorcontrol, DMC)、资料撷取及I/O 控制(data acquisition and control, DAQ)等领域。
针对应用最佳化,并有效缩短产品开发周期,F28x 核心支持全新CCS环境的C compiler,提供C 语言中直接嵌入汇编语言的程序开发介面,可在C语言的环境中搭配汇编语言来撰写程序。
值得一提的是,F28xDSP核心支持特殊的IQ—math 函式库,系统开发人员可以使用便宜的定点数DSP 来发展所需的浮点运算算法。
F28x 系列DSP预计发展至400MHz,目前已发展至150MHz的Flash型式。
基于TMS320LF240xDSP的无刷直流电机控制器的设计_陈红琳
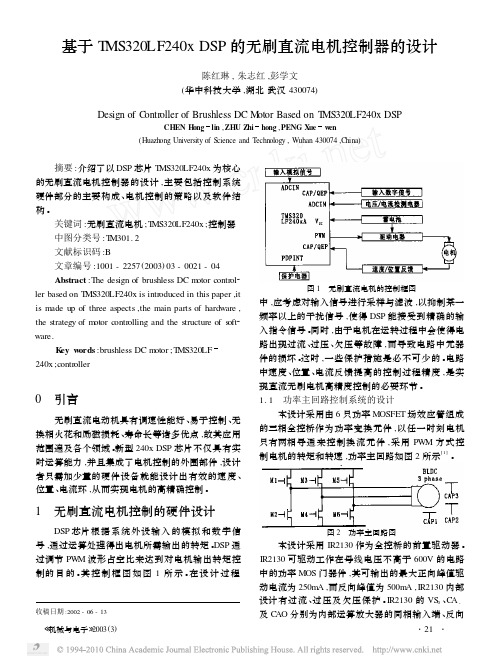
基于T MS320LF240x DSP 的无刷直流电机控制器的设计陈红琳,朱志红,彭学文(华中科技大学,湖北武汉430074)Design of C ontroller of Brushless DC M otor Based on T MS320LF240x DSPCHEN H ong lin ,ZHU Zhihong ,PENG Xuew en(Huazhong University of Science and T echnology ,Wuhan 430074,China ) 摘要:介绍了以DSP 芯片T MS320LF240x 为核心的无刷直流电机控制器的设计,主要包括控制系统硬件部分的主要构成、电机控制的策略以及软件结构。
关键词:无刷直流电机;T MS320LF240x ;控制器中图分类号:T M301.2文献标识码:B文章编号:1001-2257(2003)03-0021-04Abstract :The design of brushless DC m otor control 2ler based on T MS320LF240x is introduced in this paper ,it is made up of three aspects ,the main parts of hardware ,the strategy of m otor controlling and the structure of s oft 2ware.K ey w ords :brushless DC m otor ;T MS320LF 240x ;controller收稿日期:2002-06-130 引言无刷直流电动机具有调速性能好、易于控制、无换相火花和励磁损耗、寿命长等诸多优点,故其应用范围遍及各个领域。
新型240x DSP 芯片不仅具有实时运算能力,并且集成了电机控制的外围部件,设计者只需加少量的硬件设备就能设计出有效的速度、位置、电流环,从而实现电机的高精确控制。
tms320lf240xdsp原理及应用

tms320lf240xdsp原理及应用《DSP复习题》1. DSP按照用途可以分为哪两大类?通用型、专用型2. DSP的主要技术指标有哪些?3. LF2407具有多少个不可屏蔽中断和多少个级别的可屏蔽中断?4.LF240x系列DSP具有哪三种低功耗模式?5. LF2407A指令执行可以实现4级流水线操作,分别是什么?6.TMS320LF240xA系列DSP控制器的CPU中ARAU模块的主要功能。
7.累加器的操作与5个位于状态寄存器ST0,ST1的位有关,分别为哪些位?8.乘法器单元包括哪四个主要功能模块?9.硬件乘法器的2个乘数分别从哪读取?最后保存在哪里?10.C24x芯片有16位地址总线,可访问哪三个独立的地址空间?共计多少字节?11.TMS320LF2407A DSP控制器的存储器DARAM有多少字?分为哪三块?其中哪个块可根据的CNF位设置的不同,即可被映射到程序存储空间,也可被映射到数据存储空间?12.当采用直接寻址方式时,将整个64千字的数据存储器分为多少个数据页?如何标记?每页由多少个字组成?13.程序存储器用于存放哪些内容?14.事件管理器模块包含哪四个主要功能模块?15.中断响应的等待时间包括哪三个阶段?16.CPU的中断寄存器包括哪两个寄存器?17.串行通信的一个数据帧由哪4部分组成?18.TMS320LF2407A DSP控制器的SARAM的用途主要有哪两种?19. 通用定时器有哪4种可选的计数模式?20. 当系统时钟是40MHZ时,SCI通信的速率范围是多少?21. COFF目标文件至少包含哪三个默认的段?22. 240x系列DSP的模数转换器是多少位的?具有多少路模拟输入通道?23. 自动排序器的两种工作模式分别是什么?24. 240x系列DSP的SCI模块有哪两种多处理器模式?25. LF2407A的数字i/0引脚功能是复用的,具体功能可以通过哪两种控制寄存器来进行设置?26. 简述哈佛结构的概念。
第15章 TMS320LF2407应用实例
– 模数转换:控制转换时间、中断和结果获取
– 电机控制算法实现:用标准C语言编写控制算法(根据反馈的 电流和电压量计算控制量:电压和频率 – PWM波产生:根据给定的电压和频率计算空间电压矢量的幅值 和相位,并计算对应的比较单元参数 – 转速测量:利用码盘脉冲捕获电路获得单位时间内的脉冲数, 或者一个脉冲的时间,从而得到速度值 – 串行通信:将运行中的参变量送到上微机
4. 电机控制系统软件流程图
主程序 调用START初始化 TMS320LF2407 初始化液晶显示 调用键盘子程序
PWM_ISR
计算空间矢量 电压辐角
确定空间矢量 所在区间 计算PWM占空比 配置全比较单元
启动? 是 启动PWM发生器
否
停止?
否
是
关闭PWM发生器
否
运行到采 样周期? 是 调用控制器算法
返回
PWM生成子程序框图
8.2 实现空间矢量PWM 一 SVPWM的原理
2 利用TMS320LF240x 实现SVPWM算法
2 利用TMS320LF240x实现SVPWM算法的程序
设计一位置式PI算法子程序(用C语言),其中反馈信号由一路A/D转换获 得,已经转换为浮点数。
u (k ) K P e(k ) K ITsam e(i) K P e(k ) uI (k )
i 1
k
K P e(k ) K ITsam e(k ) uI (k 1)
式中 Tsam为采样周期 define uplim 10 define dnlim -10 float uk,kp,ki,Tsam,ek,uk1; void pical( float gd,float fk) { ek=gd-fk; uk=kp*ek+ki*Tsam*ek+uk1; if(uk>uplim){ uk=uplim; } else if(uk<dnlim){ uk=dnlim; } uk1=uk; }
新型电机控制芯片TMS320F240
g n t od a eu e or du e t ec s e tme h sc n b s dt e c o t h
o h h e d g t n tc c nto y t m ft e w ol i i kie i o r ls s e al
b mp o i gc e p r l c r ye lyn h a e ee ti cmo o , e r t r f we
中 国 科 学 技 术 大 学 自动 化 所 ( 徽 安
L
台肥
2 02) 都 改欣 3 0 7
张培仁
& o c n ea dT e n k f h n r fS i c n e h o  ̄yo C i a AuaRo e r ht¥i ̄8Z  ̄ie e sac # t e h e? 9Ha g h u 3 0 7DUGa- i. Z ANG " n za20 2 in x H
摘
要 : T 奢 司生 产 的 T S 2 F 4 I M 3 0 2 0是 专 门 册 干控 Ab ta t TeT 3 0 20pou e y订 s r c : h MS 2 F 4 rd c db
ci e fr o t lT es ei hp h p c o nr h cf ci c o p i c
制 的芯片 , 它特 有 的芯 片 蛄 构 和 砷 托 击 定 了它 在 控 制 中 广 泛 的 应 用。 文章 舟 鲴 了 F 4 2 0的 结 构 和 特 性 ,井
介 绍 了对 无刷 直 流 电动 机 的 安 控 制
s u tr e df c o 旧 ma e  ̄  ̄d l u e l c n o Tn p p rm t n h c 胂 t c e n u tn r u ni d f e ey s d n o t 1 r a e i mc r. s  ̄ t es “ 鲫 do  ̄a tr t f 2 0 日 tea r t o t b 1 r c i i o F 4 h co n o o ] o sc ac M f
基于TMS320F240 DSP的开关磁阻电机调速系统
基于TMS320F240 DSP的开关磁阻电机调速系统吕丰;王勇;裴秀高【摘要】研究了TMS320F240 DSP芯片对7.5 kW 4相(8/6极)开关磁阻电机的控制调速,比较不同功率变换的利弊后,根据电机结构选择功率变换电路、主开关元件,设计了实用性较强的无位置传感器检测转子位置方案,以及控制器的硬件电路,给出了具体的系统抗干扰措施.通过系统测试,本调速系统控制频率较高,电机运行噪音小,性能优越.【期刊名称】《上海电力学院学报》【年(卷),期】2010(026)001【总页数】5页(P36-40)【关键词】开关磁阻电机调速系统;数字信号处理器;智能功率模块;PI控制【作者】吕丰;王勇;裴秀高【作者单位】上海电力学院,电力与自动化工程学院,上海200090;上海电力学院,电力与自动化工程学院,上海200090;上海电力学院,电力与自动化工程学院,上海200090【正文语种】中文【中图分类】TM352;TP273+.5在电气传动技术迅猛发展的背景下,20世纪80年代国际上推出一种新型交流电动机调速系统——开关磁阻电动机调速系统(Switched Reluctance Driver,SRD).它融新的电动机结构——开关磁阻电动机(Switched Reluctance Motor,SRM)与现代电力电子技术、控制技术为一体,兼有异步电动机变频调速系统和直流电动机调速系统的优点.我国于1984年前后以较高起点开始SRD的研究、开发工作,已研制出0.05~50 kW的20多个规格的SRD.目前,SRD的开发范围已经达到转矩为0.01~10 Nm,功率为0.01~5 000 kW,最高转速可达100 kr/min,规格已从多相发展到单相、两相,电机形式也从旋转形发展到直线型.SRD的应用领域已从最初侧重于牵引运输发展到工业、航空工业和家用电器等多个领域.本文主要设计完成了380 V(AC),4相8/6极,7.5 kW开关磁阻电机控制系统.本系统以TI公司生产的TMS320F240DSP作为CPU的控制芯片,采用PI数字调节,设计了与开关磁阻电机相对应的接口电路.1 开关磁阻电机调速系统结构开关磁阻电机调速系统是由开关磁阻电机、功率变换电路、DSP控制器、位置传感器4大部分构成,其系统结构如图1所示.图1 SRD系统结构示意2 硬件设计方案2.1 开关磁阻电机的功率变换器及其电路分析功率变换器的性能和形式将直接影响SRM的效率、成本和可靠性,合理设计功率变换器是提高整个SRD性价比的关键.功率变换器主要有3个作用:一是开关作用,使绕组与电源接通或断开;二是为绕组的储能提供回馈途径;三是为SRM提供电能,满足机械能的转换.由于SRD功率变换器只需要给SRM提供单向电流,故比异步电动机PWM变换器简单可靠.然而SRM的工作电流、电压波形并非正弦波,而且波形系统运行条件及电动机设计参数较难制定,这就使得定额计算和确定主开关器件较为复杂.常见的SRM功率变换器有3种:一是双绕组功率变换器;二是不对称半桥功率变换器;三是H桥式功率变换器.2.1.1 整流电路SRD采用交流电源供电,而整流电路的作用是将交流电源转换成直流电源,以供逆变电路使用.整流电路的进线为三相三线制,并采用三相桥式整流电路,由6个整流二极管组成.电路的交流输入端为 L1,L2,L3,接三相电源,线电压为 380 V,50 Hz.整流电路的电压峰值为三相电压峰值:其平均值为:整流电路如图2所示.图2 三相桥式整流电路电容器Cd1和Cd2对整流电路起滤波作用.三相三线整流电路的优点是直流输出电压脉动较小,负载电流增大时平均电压下降较少,且不造成供电系统零线电流. 2.1.2 主开关器件的选型SR电动机功率变换器的主开关器件选择与电动机的功率等级、供电电压、峰值电流、成本等有关;另外还与主开关器件本身的开关速度、触发难易、开关损耗、抗冲击性、耐用性、并联运行的难易性、峰值电流定额的比值大小及市场普及性有关.就当前电力电子技术的发展现状而言,有普通晶闸管、可关断晶闸管(GTO)、电力晶体管(GTR)、功率MOS场效应管(MOSFET)、绝缘栅双极晶体管(IGBT)、智能功率模块(IPM)可供选择.普通晶闸管的开关频率低(200 Hz以下),限制了SRD在斩波工作模式下的运行性能,这使得其很难在中小功率的SRD中广泛使用.而GTR容量有限,主要是电流容量与耐压之间尚有难以克服的矛盾,且GTR的电压、电流过载能力差,容易发生二次击穿而损坏,保护较困难.GTO管降压比普通晶闸管高,工作频率较GTR 低,缓冲电路的损耗较大,门极控制较复杂,因此在小功率高性能的SRD中,其与GTR,MOSFET,IGBT相比并不占优势,而MOSFET单管功率很难做得很大.IGBT兼有MOSFET和GTR的优点,因而性能更为优异.智能功率模块(IPM)是把控制芯片与控制电路,驱动电路,过压、过流、过热和欠压保护电路,以及自诊断电路组合起来,密封装在同一绝缘外壳内,称之为智能化电力半导体模块.本文的功率变换器采用三菱公司第3代智能化IPM模块,并复合了高速(开关频率高达20 kHz)、低开关损耗的IGBT功率器件和优化的栅极驱动电路,减少了外围接口电路的器件数量.此外,通过使用先进的电流传感器芯片,IPM能连续、高效地对功率器件的电流大小进行实时监控,并提供有效的过电流和短路保护.同时,模块集成了过热和欠压保护,使系统的可靠性得到进一步提高.2.1.3 功率变换器的设计本文控制对象为4相8/6极SR电动机,相数为偶数,因此可选用H桥式功率变换器,主开关器件为IPM,采用三相桥式全波整流电路供电,由此确定的功率变换器如图3所示.图3 功率变换器结构示意图3 中,SA,SB,SC,SD 为智能模块 IPM;VDA,VDB,VDC,VDD 为续流二极管;C1,C2 为滤波电容,其作用是对整流输出电压平滑滤波,并作出相应的绕组能量回馈;R1,R2是为了平衡C1,C2两端的电压,兼有停机时为C1,C2提供放电回路的作用.AB,CB,CD,AD两相同时通电,循环导通工作.若SA,SB同时导通,则 A,B 相通电.若 SA关断,SC闭合,则A相关断,C相开始导通,A 相绕组将通过二极管VDA续流,C相绕组也构成回路,使B相电流增大,中性点电位必然增高,促使A相续流迅速衰减,强行换相.紧接着SC关断,开通SD,则C,D相导通,如此循环导通,电机就可连续运行.2.1.4 主开关驱动电路的实现为了能驱动与IPM接口的高速光电耦合器HCPL4504,系统选用MC14504BCL和MC14503BCL,其中MC14504BCL将5 V的CMOS电平转换为15 V的CMOS电平,MC14503BCL用于驱动HCPL4504.当MC14503BCL输出低电平,HCPL4504的副边低电平IPM导通;反之IPM关断.另外,仅靠IPM内部保护电路不能完全实现器件的自我保护,而要使系统真正安全、可靠地运行,需要外围保护电路的辅助.TMS320F240数字信号处理器的事件管理器模块包含一个功率驱动保护引脚PDPINT,当该引脚被拉低时,所有的事件管理器输出引脚均被硬件设置为高阻态.因此,PDPINT可用来为监控程序提供电机驱动的异常情况,并实现故障保护.将作为4相定子绕组开关的IPM的故障信号接到光耦TLP521-1上,并与DSP的PDPINT引脚连接.当PDPINT引脚被拉低为低电平时,DSPF240内部定时器立即停止工作,而所有PWM输出呈高阻态,同时产生中断信号.2.2 位置检测的硬件实现位置反馈是SRD系统必不可少的组成部分,位置检测是确定定子、转子的相对位置,DSP根据位置信号进行换相,并用于转矩估算.本系统采用光电式位置传感器,它由静止和转动两部分组成.前者包括红外发光二极管、红外光敏三极管和辅助电路;后者为与SRM转子同轴安装的30°间隔的6齿遮光盘,遮光盘与电机同步旋转,通过遮光盘的遮光、透光,使光敏元件产生导通与关断信号.对于4相8/6极SR电动机,在定子上安装两个相距75°的光敏传感器,并输出两路相位差15°和占空比为50%的方波信号,就组合成了4种不同的状态,分别代表电动机4相绕组的不同的参考位置.TMS320F240的两个捕获单元CAP1和CAP2分别检测这两路信号.当捕获输入引脚上检测到一个转换时,定时器T1或T2的值被捕获并储存在相应的两级深度FIFO堆栈中.位置信号的上、下跳变均引起捕获中断,即每15°产生一次捕获中断,而运行捕获中断服务程序则要根据转子的瞬时位置信号.由SRM换相逻辑确定电机对应绕组的关断与导通,并根据测周法计算电机的实际转速.位置检测电路如图4所示.图4 位置检测电路3 控制器软件实现3.1 SRD控制策略分析在启动过程中,SR电机始终工作在有位置检测的自同步状态.在启动瞬间,转子转速在0~50 r/min区间时,转速较低,电流的变化率很大,在此期间进行转速调节会很危险.因此,在这一阶段SR电机一般采用电流斩波控制方式限制启动电流的幅值,有效控制绕组电流的大小,便于调节启动转矩,以避免在启动堵转时发生电流超调现象,并能保证启动过程中转矩较平稳.在电机运行状态时采用电压PWM控制模式,电压PWM闭环调速,给定速度与反馈速度的偏差经速度控制器输出后即由速度PI控制子程序计算出电压的控制量作为PWM电路的占空比给定值,控制一定频率的输出方波脉冲宽度.宽度被调制的方波脉冲信号加载到基极驱动电路中,以控制IPM的导通与关断.另外,将施加到SRM绕组上的直流电压斩波变成对应频率和占空比的方波电压,从而改变了绕组两端电压的有效值,实现SRM转速控制.在电机运行过程中,接收到反转命令时,系统封锁PWM信号,并判断电机转速是否降为零.当电机转速降为零后,系统就开始反方向进入启动状态,其运行过程和正向时相似.3.2 控制器程序框架设计控制器程序是用TMS320F24x的汇编语言编制实现的,整个控制是由2个循环主程序和3个中断子程序配合运行实现的.系统初始化包括:系统时钟设置、中断设置、事件管理器设置、ID配置,以及用户变量定义;循环主程序包括停机等待循环主程序和电机运行主程序;3个中断子程序包括T1周期中断、捕获中断和PDPINT中断.3.3 系统抗干扰措施由于大多数的工业控制采用单片机,因此单片机的抗干扰措施就显得尤为重要.要解决单片机抗干扰措施,必须先找出干扰源,然后采用单片机软、硬件技术来解决. 干扰源主要来自外部电源、内部电源,以及空中、周围电磁场.外部干扰源主要通过I/O口输入等.硬件系统采用了以下抗干扰措施.(1)系统控制电路的电源采用模拟电源,即通过桥式整流后再经过电容、电感滤波及电源变换芯片得到.IPM的电源采用开关电源,但其交变电压和电流会通过电路的元器件对CPU产生很强的尖峰干扰和谐振干扰.(2)A/D转换输入端加低通滤波器.另外,回路与控制回路通过金属屏蔽板进行隔离.(3)主回路与控制回路通过金属屏蔽板进行隔离.(4)主回路与控制回路之间的引线采用屏蔽电缆.(5)模拟地与数字地分开,通过电感相连.(6)每个芯片的VCC和GND间连接0.01 μF的电容.4 实验结果系统试验对象为4相8/6极开关磁阻电机,额定功率为7.5 kW,额定转速为1 500 r/min,转速范围为50~2 500 r/min.图5为低速运行定角度电流斩波的电流波形图.图5 电流斩波控制绕组电流波形从图5可以看出,绕组电流受斩波电流给定值控制.图6为电机运行在2 000r/min时绕组电流波形,此时开通角为3.1°,关断角为11.2°.从图6可以看出电机运行较为稳定,波形波动较小,从而说明抗干扰措施效果明显.图6 电压PWM控制绕组电流波形5 结论(1)利用TI新一代面向电机控制的高集成度TMS320F240数字信号处理器的内部资源,如A/D,PWM,定时器,捕获单元等,并采用新型的功率控制模块(IPM),使系统结构紧凑,可靠性高,大大减小了控制器的体积和重量;(2)给出了具体的抗干扰措施,使得系统控制频率较高、电机运行噪音小、性能稳定.另外,模块化的程序易于扩充,方便与其他先进控制方法相结合.参考文献:【相关文献】[1]王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004:266-276. [2]严友钧,朱光宇.DSP应用技术教程[M].北京:中国电力出版社,2002:1-279.[3]李俊卿,李和明.开关磁阻电机发展综述[J].华北电力大学学报,2009,29(1):1-5.[4]韩君,张淑芳,欧阳一鸣.基于TMS320F2407芯片的开关磁阻电机调速系统设计[J].DSP开发与应用,2009,25(7):357-361.[5]王宏华,许华.开关型磁阻电动机调速系统的发展及现状[J].电气传动,2001,(5):3-7. [6]陈昊,谢桂林,张超.开关磁阻电机功率变换器主电路研究[J].电力电子技术,2000,(3):22-25.[7]迟岩,谢瑜,罗炳莲.基于DSP的开关磁阻电机速度控制器的设计研究[J].福州大学学报,2006,(3):357-361.。
TMS320F240在同步电机变频调速中的应用
精 度 。6 l K的 F A H E P O 可 由 T 3 0 2 0控 L S E R M, M¥ 2 F 4
制 芯片 内核 本 身擦除 和编 程 。使 用该 芯片无 需外 扩
程序 存储 器 。 大简 化 了控 制 电路 的设 计 。 大 提高 了系
统 的抗 电磁兼 容能力 和 系统 的稳定性 。能 实现 高速 输 人和高 速率传 输数 据 。同时 由该芯 片构 成 的电路 具 有低 成 本 、 低功 耗 、 度高 、 功 能化 、 用 化 、 精 多 通 性 价 比好等 特点[ 2 1 能实 现系 统控制 、 。它 数据 处理 等 的 智 能化 , 系统 动态性 能好 。 常适合 于先 进 电机 控制 非 算 法 的数 字 化实现 。
压 和频 率 的 可调 。
关 键 词 :M 3 0 2 0 脉 宽 调 制 ; 频调 速 ; 步 电机 T S2 F4 ; 变 同
中 图分 类 号 : M3 1 T 5 文 献 标 志 码 : B
R sac fVaibe- e u ny Adut g S ed o y c rn u oo B sd eerh o r l-rq e c jsi pe S n h o o s M tr ae a f n f
维普资讯
文章 编 号 :0 194 (0 70 —0 10 10 —9420 )20 0 —3
T 3 0 2 0在 同步 电机变频调 速 中的应 用 MS 2 F 4
孟武胜 . 杨 鹏
( 北 工 业 大学 自动 化 学 院 , 安 7 07 ) 西 西 1 O 2
摘 要 : 绍 了基 于 T S 2 F 4 制 芯 片 的 同 步 电机 变频 调 速 系统 。该 系统 采 用 矢量 控 制 介 M 3 2 0控 0
基于DSP芯片TMS320F240的步进电机调焦系统设计
基于DSP芯片TMS320F240的步进电机调焦系统设计
0 引言:
当摄影镜头拍摄运动的物体时,如果运动轨迹已知,摄影镜头必须对焦
距进行调节,从而调整目标的像点的位置,使得目标始终位于焦点上,达到实
时拍摄的目标,传统变焦大多是利用机械装置完成的,比如凸轮机构,齿条机构;但是由于机械加工工艺复杂,其精度、平稳性和灵活性都难以满足要求,为此本系统利用步进电机带动摄像机完成变焦,由于步进点机精确地按照步进角转动,并且由DSP 进行控制,从而满足了以上机械装置无法完成地性能要求。
实验结果表明,本系统调焦曲线与理想曲线拟合度较好,拍摄已知运动轨迹的目标,达到了满意效果。
1 调焦系统设计思想
在光学系统中,采用一组物镜,调节轴向位移,物镜光学系统物象关系是:
X′=f2/ X
其中X′——像距(目标像平面到主焦平面的距离);
X ——物距(目标距离);
f ——光学系统焦距f=常量,像距X′与物距X 成反比关系。
利用已知的摄影调焦曲线确定步进电机转动所需的步数和时间坐标关系,存入F240 数据存储器中,利用F240 运算速度快、片载FLASH 存储器大(16K 字)的特点,准确控制步进电机控制器驱动步进电机运转,通过机械装置实现摄影镜头焦距按照规定的曲线变化,从而实现实时拍摄运动物体的功能。
2 硬件设计部分。
基于TMS320F240DSP的开关磁阻电机调速系统
d sg i g v n I i p o e b e p rme t t a t e y tm p ro ms aif co iy n p e e in s ie . t s r v d y x e i n s h t h s se ef r s tsa t rl i s e d r g lto ,h o toln e a ira d a t— it r n e p o e te . e u ain t e c n r li g b h vo n n id su ba c r p ris
行 噪音 小 , 能 优越 . 性
关键词 :开关磁阻电机调速系统 ; 数字信号处理 器 ; 智能功率模 块 ; I P 控制
中 图分 类 号 :T 3 2 T 2 3 5 M 5 ; P7 . 文 献标 识码 :A
, e S th d Reu tn e Drv s d o nl wic e l ca c ie Ba e n mMS3 0 4 P 2 o DS
TMS 2 2 0 i e i n d.T a e lb r tst e d s d a t g so fe e tp we o v re s 3 0F 4 s d sg e hep p re a o a e h ia v n a e fdi r n o rc n e tr .Th f e
要 :研究 了 T 30 20D P芯片对 7 5k 4相 (/ MS2 F 4 S . W 8 6极) 开关磁阻 电机的控 制调 速 , 比较不同功率 变换
的利弊后 , 根据电机结构选 择功率变换 电路 、 主开关元件 , 设计了实用性较 强的无位置传感器检测转子位置方
案, 以及控制器的硬件电路 , 给出 了具体的系统抗 干扰措施 . 通过系统测试 , 本调速系统控制频率较高 , 电机运
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TM S320F240D SP处理器在电动机微机保护装置设计中的应用①单亚娟 郑建勇 曹晓华(东南大学电气工程系 南京 210096)APPL I CAT I ON OF T M S320F240D SP IN THE HARDW ARED ESIGN OF MOT OR PROTECT I ON D EV I CEShan Yajuan Zheng J ianyong Cao X iaohua(EE D ep t.Sou theast U n iversity,N an jing,210096)ABSTRACT T h is article discu sses the app licati on of D SP in the hardw are design of mo to r-p ro tecti on device.A t the base of analyzing the general design of the system,it m ain ly in troduces the con stitu ti on and w o rk ing p rinci p le of the p rocessing un it.T hen it also discu sses the analog ac2 qu isiti on un it,keyboard&disp laying un it,comm un icati on un it and pow er un it of the device.U sing the D SP in devel2 op ing and design ing the mo to r-p ro tecti on device no t on ly realizes the functi on of general mo to r p ro tecti on,bu t also greatly raises the efficiency of p rocessing data.Key W ords D SP,M o to r,M icrocompu ter P ro tecti on摘要 本文介绍了D SP芯片在电动机微机保护装置设计中的应用。
在对系统的总体设计方案作了分析的基础上,重点介绍了装置的处理器模块的构成和工作原理,以及模拟量采集、键盘显示、通信、出口、电源等模块的设计。
此外,论文对装置软件设计的方法作了一定的介绍。
在电动机微机保护装置中采用D SP芯片进行开发设计,不仅可以完成电动机综合保护的功能,而且大大提高了处理数据的效率。
关键词 D SP 电动机 微机保护1 引言 数字信号处理(D igital Signal P rocessing)是利用专门或通用的数字信号芯片,以数字计算的方法对信号进行处理,包括对信号的采集、变换、滤波、估值、增强、压缩、识别等处理,以得到人们需要的信号形式。
D SP处理器的一个重要特征是采用改进的哈佛结构,具有独立的数据和地址总线,从而使得处理器指令和数据并行,大大提高了处理效率。
在微机保护产品中采用D SP处理器取代传统的8位或16位单片机,可以在硬件资源、开发平台等方面取得很多优越性,并通过与CPLD、FLA SH 等的配合,完成一些复杂的算法,所以基于D SP平台电动机微机保护装置除完成电动机综合保护功能外,还能够完成电动机的转子笼条断条故障诊断等一些比较复杂的功能,从而大大提高保护装置的性能。
2 电动机保护原理电动机常见的故障类型有对称故障和不对称故障两大类。
对称故障对电动机的损害主要是由于电流增大引起的热效应,不对称故障多半不出现明显的电流幅值变化,它对电动机的损害主要是不对称引起的负序效应。
根据对称分量法分析,当电动机发生不对称故障时,电动机的电流可以分解为正序、负序和零序分量,且负序、零序电流会以较大幅值出现。
根据上述分析,可以将高压电动机的保护分解成过流保护、负序电流保护、零序电流保护三个部分。
(1)过流保护,分为电流速断、定时限过流、热过载反时限过流保护三段式。
1)电流速断保护:速断保护动作电流I ds整定值按下列两条计算原则中所得的最大值选定。
a.要求电流速断保护的动作电流I ds必须不大于电动机满载启动时的起动电流I q。
I ds=K c I eq=K k K q I e(1)式中:I e——电动机的额定电流归算到机端电流互感器二次侧的值;K q——电动机起动系数,一般取4~7;K k——可靠系数,取1.2~1.3。
b.在电动机附近速断保护范围之外短路时,要求I ds大于次暂态短路电流I″d。
第15卷第1期2003年2月 电力系统及其自动化学报P roceedings of the EPSAV o l.15N o.1Feb. 2003①本文2002年5月10日收到本文修改稿2002年6月18日收到I ds =K k I ″d =(1.2~1.3)I ″d (2)式中:同步电动机I ″d =5.5I e ;同步补偿机I ″d =6Ie ;对异步电动机附近外部相间短路式,I ″d 只需按式(1)计算即可。
2)定时限过流保护:延时定值需躲过电机自启动时间。
当电机启动时,在T <T start 时,启动电流小于保护定值,保护不动作;当T ≥T start 时,时间元件动作,保护的电流定值自动减小一半,若此时启动电流仍超过保护新定值(为原定值一半),保护动作跳闸。
3)热负载反时限过流保护:热过载反时限过流保护的动作方程如下:t =Σ(I eq I s )2-1(3)式中:I eq ——电动机运行中三相电流中的最大值;I s ——可整定的保护动作电流;Σ——可整定的发热时间常数(一般由制造厂提供)。
(2)负序保护发生严重的不对称故障时,负序电流I 2很大,这时要求根据I 2设置单独的快速保护。
一段:高定值I ′2d ,短延时t 1:t 1为固定值。
I ′2d =I (2)2m in K c m =I(2)2m in1.25(4)式中,I (2)2m in 为系统最小运行方式下,电动机机端两相短路时,最小的短路电流负序分量。
二段:低定值I ″2d ,长延时t 2:t 2由用户整定,一般可整定为3s 。
I ″2d =(0.3~0.4)I e(5)按式(4)计算后,还必须检验I ′2d 的值大于I ″2d 。
(3)零序保护当3I 0大于保护的动作电流I ′0d 时,经短延时t 保护出口动作,发出接地信号或跳闸。
对3kV 、6kV 、10kV 电网中的大多数变压器中性点不接地或经消弧线圈接地的系统,保护通常只需发接地信号,不跳闸。
保护的短延时可整定为0.1~0.5s 。
对3kV 、6kV 、10kV 电网中的少数变压器中性点经高阻接地的电网,保护动作于跳闸,其动作电流I ′0d 应躲过启动过程中由于三相电流不完全对称而出现的三倍不平衡零序电流,延时整定为0.5s 。
3 TM S 320F 240电动机微机保护装置的硬件系统结构 电动机微机保护装置的硬件系统结构采用模块化结构,主要由处理器模块、键盘显示模块、模拟量采集模块、出口模块、电源模块和通信模块六个部分组成。
其框架结构如图1所示。
图1 系统硬件框架结构4 处理器模块的设计处理器模块是整个装置的核心,负责模拟信号的调理滤波、采样、模拟 数字转换、频率和相位的测量、开关量信号的输入 输出、通信、系统计时、数据计算、逻辑判断等功能。
处理器模块采用DSP 处理器进行设计,可以充分利用其数据运算处理的能力,其软硬件开发平台不仅可以进行复杂的算法设计如交流采样的FFT 算法、自校正功能等,而且可以对电动机早期故障(如转子笼条断条)及一些非正常运行状态作出诊断,从而大大提高电动机保护装置的性能。
本装置的处理器模块由TM S320F240微处理系统构成。
TM S320F240是T I 公司于1997年在TM S320C2xx 的基础上推出的一种专用定点可编程芯片,它在单一芯片上集成一个DSP 内核和各种外设器件,可以解决各种工程应用方案。
为了简化系统设计,可以把系统的一些外围控制电路由・86・电力系统及其自动化学报 2003年第1期CPLD (Com p lex P rogramm ab le L ogic D evice )来实现。
在设计中选用X I L I N X 公司生产的CPLD ,其中XC9500系列产品采用了系统内5V 可编程FA ST FLA SH 技术,并且含有内部JTA G 双向扫描测试逻辑。
本系统采用电路原理图方式对CPLD 进行逻辑编辑。
F240芯片可以工作在微处理器或微控制器两种状态,通过M P M C 引脚上的电平决定,其主要区别在于选用片内或片外的存储空间作为程序存放地址。
考虑到系统调试阶段需要外部的存储空间,所以在系统设计时添加了高速静态RAM 作为外部程序空间。
另外,由于F240使用的是16位数据和地址总线,所以选用两片8位的S DRAM 构成外部程序空间。
F240的存储结构特点是程序、数据和I O 地址空间分离,每部分空间为64K 字。
由于F240的数据地址和I O 地址是分开的,由D S 信号作为外部数据存储器的片选信号,而IS 信号表示对外部I O 地址进行访问,所以只需要对外部设备进行地址译码,由CPLD 完成。
另外,TM S320F240通过边沿扫描的方法实现仿真器对目标系统的仿真,由仿真器接出的仿真头和芯片的JTA G 口相连可以进行仿真和调试。
5 其它各单元电路装置其它各组成单元电路主要有:模拟量测量电路、开关量输入 输出电路、键盘显示电路、通信电路等。
F240片内集成了采样保持电路和模拟多路转换器的双十位AD 转换,鉴于对于电动机测量和保护精度而言,若电流采样值范围在0~10mA ,采用10位AD 可以达到精确到小数点后一位,大致可以满足多数的电动机保护的要求,为了尽量充分的利用芯片资源,采用了片内AD 转换进行设计。
但是考虑到保护尤其是监控精度要求的严格性,现已在本装置中外扩了14位A D 转换芯片AD 7863,这样可以更好的符合精度要求。
对外部信号进行调理的电路由精密电位器构成,滤波器则采用二阶低通滤波器。
此外,模拟量测量电路中还包括过零检测单元,实现模拟量频率和相位的测量。
开关量输入 输出电路主要完成状态信号的输入和动作信号的输出。
继电保护装置CPU 的扩展口一般较少,不能满足输入输出的需要,因此在读入开入量及输出量时,往往需要进行口的扩展。
本装置中此部分功能集成在CPLD 中,并挂在其内部的地址 数据总线上。
装置采用薄膜键盘,一共有9个按键,只需要通过上、下、左、右、取消、确认六个按键结合菜单便可直观地在线、离线整定定值、修改实际时间、就地操作开关等。