基于集合卡尔曼滤波的PyWOFOST模型
基于集合卡尔曼滤波的PyWOFOST模型在东北玉米估产中的适用性验证
基于集合卡尔曼滤波的PyWOFOST模型在东北玉米估产中的适用性验证陈思宁;赵艳霞;申双和【期刊名称】《中国农业气象》【年(卷),期】2012(033)002【摘要】PyWOFOST model based on Ensemble Kalman Filter (EnKF) was introduced to assimilate LAI into crop model. Meteorological data, agro-meteorological data and MODIS LAI data were used to test the applicability of PyWOFOST model in simulating maize yield in Northeast China. 16 agro-meteorological stations with effective MODIS LAI data which distributed evenly and contained all maize varieties in study area were selected to model maize LAI and yield on each stations at different levels of uncertainty of TSUM1 ( Thermal time from emergence to anthesis). The result showed that, compared with WOFOST model, the PyWOFOST model greatly improved in simulating LAI and yield of maize. The mean errors of maize yield simulated by PyWOFOST were 10. 32% ,9. 25% ,7. 31% and 8. 49% at the uncertainty of TSUM1 with 0,10,20,30℃ respectively which all were lower than the mean error of maize yield (10. 55% ) simulated by WOFOST without assimilating LAI. The trajectory of LAI simulated by PyWOFOST which was more in line with maize growth and development trends was closer to observed LAI than LAI simulated by WOFOST. Therefore, the PyWOFOST based on EnKF was applicable foryield simulation of maize in Northeast China.%以叶面积指数(LAI)为结合点,引入基于集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)的作物模型-遥感信息耦合模型PyWOFOST,利用气象数据、农业气象记录观测表数据及MODIS LAI数据检验PyWOFOST模型在东北玉米种植区的适用性,并选取在研究区内均匀分布、覆盖所有玉米品种且具有有效MODIS LAI数据的16个玉米农气站点,模拟该模型在不同的TSUM1(出苗-开花期积温)不确定性水平下各站点的玉米产量及LAI.结果表明,与WOFOST模型相比,PyWOFOST模型对LAI和产量的模拟能力都有极大提高.当TSUM1的不确定性为0、10、20、30℃时,PyWOFOST模拟的产量平均误差分别为10.32%、9.25%、7.31%和8.49%,均较未同化LAI观测数据的WOFOST模拟的产量平均误差(10.55%)低;同化后模拟LAI与同化前模拟LAI相比,其轨迹更接近实测值,更符合玉米的生长发育趋势,表明基于EnKF的PyWOFOST模型在东北玉米种植区有较好的适用性.【总页数】9页(P245-253)【作者】陈思宁;赵艳霞;申双和【作者单位】南京信息工程大学江苏省农业气象重点实验室,南京210044;天津市气候中心,天津300074;中国气象科学研究院,北京100081;南京信息工程大学江苏省农业气象重点实验室,南京210044【正文语种】中文【中图分类】S127【相关文献】1.降解膜在滇东北玉米生产中的适用性研究 [J], 倪留双;黄吉美;丁云双;代健康;杨眉2.降解膜在滇东北玉米生产中的适用性研究 [J], 丁云双;黄吉美;钱成明;刘宾照;周金娥;倪留双3.基于通量观测数据的MODIS生产力模型在攀西典型烟田的适用性验证 [J], 徐同庆;徐宜民;张烨;王程栋;刘光亮;王树声;董建新;陶健4.基于PyWOFOST作物模型的东北玉米估产及精度评估 [J], 陈思宁;赵艳霞;申双和;黎贞发5.放射性测量模型标准影响因素理论估箅和实测验证 [J], 唐德明;王慧;何莉莉;张巍因版权原因,仅展示原文概要,查看原文内容请购买。
卡尔曼滤波算法python
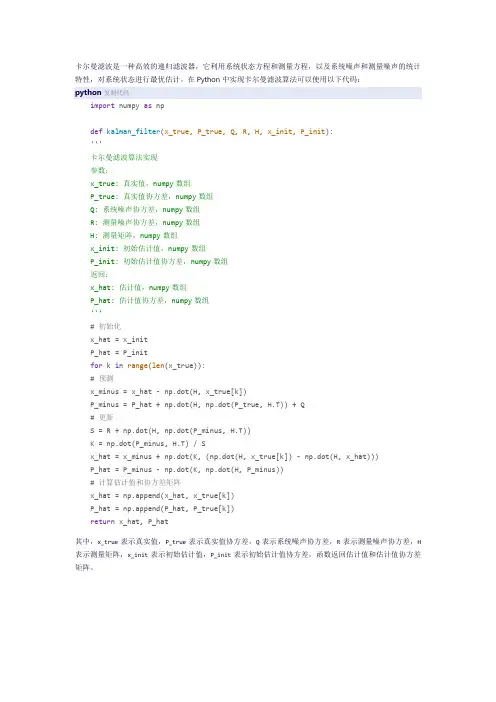
卡尔曼滤波是一种高效的递归滤波器,它利用系统状态方程和测量方程,以及系统噪声和测量噪声的统计特性,对系统状态进行最优估计。
在Python中实现卡尔曼滤波算法可以使用以下代码:python复制代码import numpy as npdef kalman_filter(x_true, P_true, Q, R, H, x_init, P_init):'''卡尔曼滤波算法实现参数:x_true: 真实值,numpy数组P_true: 真实值协方差,numpy数组Q: 系统噪声协方差,numpy数组R: 测量噪声协方差,numpy数组H: 测量矩阵,numpy数组x_init: 初始估计值,numpy数组P_init: 初始估计值协方差,numpy数组返回:x_hat: 估计值,numpy数组P_hat: 估计值协方差,numpy数组'''# 初始化x_hat = x_initP_hat = P_initfor k in range(len(x_true)):# 预测x_minus = x_hat - np.dot(H, x_true[k])P_minus = P_hat + np.dot(H, np.dot(P_true, H.T)) + Q# 更新S = R + np.dot(H, np.dot(P_minus, H.T))K = np.dot(P_minus, H.T) / Sx_hat = x_minus + np.dot(K, (np.dot(H, x_true[k]) - np.dot(H, x_hat)))P_hat = P_minus - np.dot(K, np.dot(H, P_minus))# 计算估计值和协方差矩阵x_hat = np.append(x_hat, x_true[k])P_hat = np.append(P_hat, P_true[k])return x_hat, P_hat其中,x_true表示真实值,P_true表示真实值协方差,Q表示系统噪声协方差,R表示测量噪声协方差,H 表示测量矩阵,x_init表示初始估计值,P_init表示初始估计值协方差。
卡尔曼滤波python代码
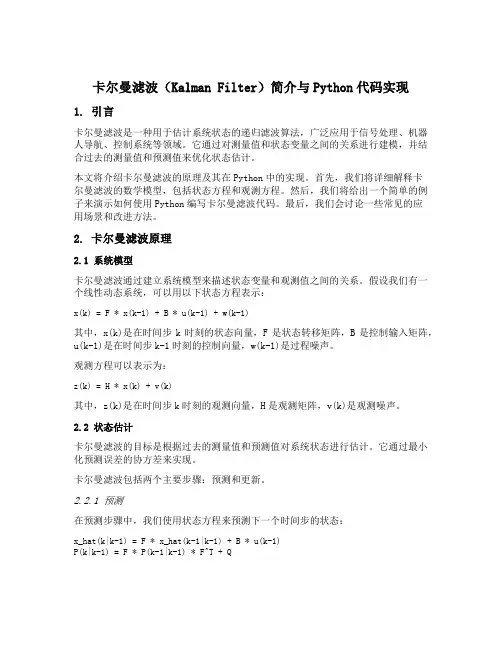
卡尔曼滤波(Kalman Filter)简介与Python代码实现1. 引言卡尔曼滤波是一种用于估计系统状态的递归滤波算法,广泛应用于信号处理、机器人导航、控制系统等领域。
它通过对测量值和状态变量之间的关系进行建模,并结合过去的测量值和预测值来优化状态估计。
本文将介绍卡尔曼滤波的原理及其在Python中的实现。
首先,我们将详细解释卡尔曼滤波的数学模型,包括状态方程和观测方程。
然后,我们将给出一个简单的例子来演示如何使用Python编写卡尔曼滤波代码。
最后,我们会讨论一些常见的应用场景和改进方法。
2. 卡尔曼滤波原理2.1 系统模型卡尔曼滤波通过建立系统模型来描述状态变量和观测值之间的关系。
假设我们有一个线性动态系统,可以用以下状态方程表示:x(k) = F * x(k-1) + B * u(k-1) + w(k-1)其中,x(k)是在时间步k时刻的状态向量,F是状态转移矩阵,B是控制输入矩阵,u(k-1)是在时间步k-1时刻的控制向量,w(k-1)是过程噪声。
观测方程可以表示为:z(k) = H * x(k) + v(k)其中,z(k)是在时间步k时刻的观测向量,H是观测矩阵,v(k)是观测噪声。
2.2 状态估计卡尔曼滤波的目标是根据过去的测量值和预测值对系统状态进行估计。
它通过最小化预测误差的协方差来实现。
卡尔曼滤波包括两个主要步骤:预测和更新。
2.2.1 预测在预测步骤中,我们使用状态方程来预测下一个时间步的状态:x_hat(k|k-1) = F * x_hat(k-1|k-1) + B * u(k-1)P(k|k-1) = F * P(k-1|k-1) * F^T + Q其中,x_hat(k|k-1)是在时间步k时刻的状态预测值,P(k|k-1)是状态协方差矩阵(描述状态估计误差的不确定性),Q是过程噪声的协方差矩阵。
2.2.2 更新在更新步骤中,我们使用观测方程来校正预测值:K(k) = P(k|k-1) * H^T * (H * P(k|k-1) * H^T + R)^(-1)x_hat(k|k) = x_hat(k|k-1) + K(k) * (z(k) - H * x_hat(k|k-1))P(k|k) = (I - K(k) * H) * P(k|k-1)其中,K(k)是卡尔曼增益(用于校正预测值),R是观测噪声的协方差矩阵,I是单位矩阵。
卡尔曼滤波 python实现
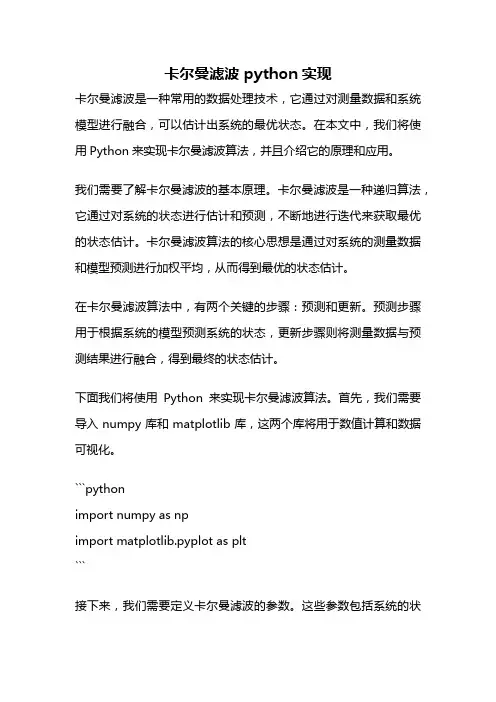
卡尔曼滤波 python实现卡尔曼滤波是一种常用的数据处理技术,它通过对测量数据和系统模型进行融合,可以估计出系统的最优状态。
在本文中,我们将使用Python来实现卡尔曼滤波算法,并且介绍它的原理和应用。
我们需要了解卡尔曼滤波的基本原理。
卡尔曼滤波是一种递归算法,它通过对系统的状态进行估计和预测,不断地进行迭代来获取最优的状态估计。
卡尔曼滤波算法的核心思想是通过对系统的测量数据和模型预测进行加权平均,从而得到最优的状态估计。
在卡尔曼滤波算法中,有两个关键的步骤:预测和更新。
预测步骤用于根据系统的模型预测系统的状态,更新步骤则将测量数据与预测结果进行融合,得到最终的状态估计。
下面我们将使用Python来实现卡尔曼滤波算法。
首先,我们需要导入numpy库和matplotlib库,这两个库将用于数值计算和数据可视化。
```pythonimport numpy as npimport matplotlib.pyplot as plt```接下来,我们需要定义卡尔曼滤波的参数。
这些参数包括系统的状态转移矩阵、观测矩阵、过程噪声和观测噪声的协方差矩阵等。
```python# 状态转移矩阵A = np.array([[1, 1], [0, 1]])# 观测矩阵C = np.array([[1, 0]])# 过程噪声的协方差矩阵Q = np.array([[0.0001, 0], [0, 0.0001]])# 观测噪声的协方差矩阵R = np.array([[1]])```然后,我们需要定义初始状态和初始协方差矩阵。
```python# 初始状态x0 = np.array([[0], [0]])# 初始协方差矩阵P0 = np.array([[1, 0], [0, 1]])```接下来,我们需要定义卡尔曼滤波的函数。
该函数接受测量数据作为输入,并返回状态估计结果。
```pythondef kalman_filter(z):# 初始化x = x0P = P0# 记录状态估计结果xs = [x]# 迭代预测和更新步骤for i in range(len(z)):# 预测步骤x = np.dot(A, x)P = np.dot(np.dot(A, P), A.T) + Q# 更新步骤K = np.dot(np.dot(P, C.T), np.linalg.inv(np.dot(np.dot(C, P), C.T) + R))x = x + np.dot(K, (z[i] - np.dot(C, x)))P = np.dot((np.eye(2) - np.dot(K, C)), P)# 记录状态估计结果xs.append(x)return xs```我们需要生成一组测量数据,并使用卡尔曼滤波函数对其进行处理。
基于集合卡尔曼滤波的PyWOFOST模型
基于集合卡尔曼滤波的PyWOFOST模型
在东北玉米估产中的适用性验证
摘要:以叶面积指数(LAI)为结合点,引入基于集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)的作物模型一遥感信息耦合模型PyWOFOST,利用气象数据、农业气象记录观测表
数据及MODIS LAI数据检验PyWOFOST模型在东北玉米种植区的适用性
遥感和作物模型的结合研究方法包括驱动法,即直接将遥感反演值代人到作物模型中驱动模型的运转,以及数据同化法,即通过调整模型中与作物生长发育和产量形成密切相关的、其它方法难以获得的初始条件和参数来缩小遥感观测值与相应的模型模拟值之间的差距,从而达到估计这些初始值和参数值的目的,简称同化法。
EnKF是顺序数据同化方法的经典代表,与连续数据同化方法相比,顺序同化方法充分考虑了观测误差及模型误差,即观测和模型的不确定性。
1 资料和方法
集合卡尔曼滤波原理:《条件植被温度指数的四维变分与集合卡尔曼同化方法》WOFOST模拟得到的逐日LAI集合即为A(预报矩阵),MODIS LAI集合即为观测向量D。
1.4.2 模型参数的同化
选取LAI作为遥感信息和作物模型的结合点,即通过同化外部观测的LAI序列(MODIS LAI 数据)和WOFOST模拟的LAI序列,当使两个序列差值绝对值之和(即目标函数)最小时的参数,即为最优参数,在此最优参数下作物模型模拟得到的产量即为最佳产量。
基于LAI的吉林春玉米作物模型与遥感的同化及灌溉模拟
作物模型输入的部分数据由于不能直接测量所以需要进行前期 准备工作,随后采用初始变量扰动法确定WOFOST模型中的参数敏 感度,根据敏感性分析结果并参考相关文献对参数进行调整,以 确定WOFOST模型的品种和土壤参数值;以榆树和白城站的20022011年作物发育期资料、叶面积指数资料和产量资料对模型结 果进行验证,据此确定适用于吉林省站点的WOFOST模型参数。(2) 遥感数据的处理。
吉林省春玉米种植主要受当地水资源制约,因此玉米的需水规律 和灌溉研究对当地粮食的稳产高产具有重要意义。通过计算春 玉米各生育期的需水量和有效降水量得到全生育期的灌溉需求 指数,以确定关键灌溉期;计算不同降水年型下生育期的灌溉量 来设定灌溉模拟方案,利用WOFOST-EnKF嵌套模型实现灌溉模拟 方案得到春玉米模拟产量,结果表明吉林省中西部春玉米乳熟成熟期灌溉效率最高,其次为播种-出苗期,可根据条件增加乳熟 -成熟期灌溉和关键生育期的灌产品,遥感数据通常会受天气、气 溶胶等未知因素影响,使得遥感值容易出现异常值,所以选取 Savitzky-Golay滤波方法处理MODIS遥感产品的时间序列曲线, 实现数据平滑和去除异常值的目的,同时结合研究区域叶面积实 测值和Logistic方程对平滑后的数据进行修正,得到与实际生育 期内生长发育情况更为接近的春玉米叶面积指数连续时间序列 曲线,为后面数据同化做好准备。(3)构建WOFOST-EnKF同化。
利用集合卡尔曼滤波算法,以8d时间序列的MOD 15叶面积指数作 为外部同化数据进行同化模拟,在榆树进行单点研究,并对比同 化后模拟产量与WOFOST模型的模拟产量,结果表明基于同化方法 构建的模型模拟产量值较同化前模型模拟产量值与实测值相差 小。(4)吉林省春玉米主要种植区灌溉方案的设定及作物模型模 拟研究。
卡尔曼滤波算法二维实现python
卡尔曼滤波算法二维实现python摘要:1.卡尔曼滤波算法简介2.二维卡尔曼滤波算法实现3.Python 实现卡尔曼滤波算法4.总结正文:一、卡尔曼滤波算法简介卡尔曼滤波算法是一种线性高斯状态空间模型,主要用来估计系统状态变量的最优值。
该算法通过预测和更新两个阶段,对系统状态进行不断优化估计。
其中,预测阶段使用系统模型和上一时刻的状态估计值,预测当前时刻的状态值;更新阶段将预测值与观测值进行比较,得到一个残差,根据残差大小调整预测值,以得到更精确的状态估计值。
二、二维卡尔曼滤波算法实现二维卡尔曼滤波是指在二维空间中,对系统状态变量进行估计。
假设我们要估计的状态变量是x,观测值是z,系统模型可以表示为:预测方程:x(k) = f(k-1) * x(k-1)观测方程:z(k) = h(k) * x(k) + v(k)其中,f(k-1) 是状态转移矩阵,h(k) 是观测矩阵,v(k) 是观测噪声。
三、Python 实现卡尔曼滤波算法在Python 中,可以使用NumPy 库来实现卡尔曼滤波算法。
以下是一个简单的示例:```pythonimport numpy as npdef predict(x, P, F):"""预测阶段"""x_pred = F @ xP_pred=F@*****+Qreturn x_pred, P_preddef update(x, P, z, H, R):"""更新阶段"""y_pred = H @ xy_obs = zS=H@*****+RK=*****@np.linalg.inv(S)x_pred = x + K @ (y_obs - y_pred)P_pred = (np.eye(P.shape[0], dtype=int) - K @ H) @ Preturn x_pred, P_pred# 初始化状态和协方差矩阵x = np.array([1, 0])P = np.array([[1, 0], [0, 1]])# 系统模型和观测模型F = np.array([[1, 0], [0, 1]])H = np.array([[1, 0]])Q = np.array([[0.1, 0], [0, 0.1]])R = np.array([[0.1]])# 进行预测和更新x_pred, P_pred = predict(x, P, F)z = np.array([1.1, 0])x_pred_updated, P_pred_updated = update(x_pred, P_pred, z, H, R) print("预测状态:", x_pred)print("预测协方差:", P_pred)print("更新后状态:", x_pred_updated)print("更新后协方差:", P_pred_updated)```四、总结卡尔曼滤波算法是一种在噪声环境下,对系统状态进行估计的线性高斯状态空间模型。
python 量化 卡尔曼滤波
python 量化卡尔曼滤波卡尔曼滤波是一种常用的信号处理和估计算法,广泛应用于量化领域。
本文将介绍卡尔曼滤波的原理、应用场景以及如何使用Python 实现卡尔曼滤波。
一、卡尔曼滤波原理卡尔曼滤波是一种递归滤波算法,通过观测数据对系统状态进行估计。
它基于贝叶斯滤波理论,通过将先验估计与测量结果进行加权融合,得到后验估计,从而提高状态估计的准确性。
卡尔曼滤波的核心思想是将系统建模为线性动态系统,假设系统的状态变量服从高斯分布,并且系统的状态变化满足线性高斯动态方程。
卡尔曼滤波通过不断迭代,利用先验估计和测量结果进行状态更新,得到最优的状态估计。
二、卡尔曼滤波的应用场景卡尔曼滤波在量化领域有广泛的应用,尤其适用于金融时间序列数据的预测和交易信号生成。
以下是一些常见的应用场景:1. 股票价格预测:卡尔曼滤波可以利用历史价格数据和其他指标,对未来股票价格进行预测,提供交易决策依据。
2. 交易信号生成:通过对市场行情数据进行卡尔曼滤波处理,可以生成交易信号,指导交易策略的执行。
3. 风险管理:卡尔曼滤波可以用于对投资组合风险的估计和控制,帮助投资者制定合理的风险管理策略。
三、使用Python实现卡尔曼滤波Python是一种功能强大的编程语言,拥有丰富的科学计算库和量化交易工具包,非常适合实现卡尔曼滤波算法。
在Python中,我们可以使用NumPy库进行矩阵运算,使用SciPy库进行卡尔曼滤波模型的建模和参数估计。
以下是一个简单的示例代码:```pythonimport numpy as npfrom scipy.linalg import inv# 定义卡尔曼滤波模型参数A = np.array([[1, 1], [0, 1]]) # 状态转移矩阵H = np.array([[1, 0]]) # 观测矩阵Q = np.array([[1, 0], [0, 1]]) # 状态噪声协方差R = np.array([[1]]) # 观测噪声协方差# 初始化状态向量和协方差矩阵x = np.array([[0], [0]]) # 状态向量P = np.array([[1, 0], [0, 1]]) # 协方差矩阵# 定义观测数据observed_data = np.array([1, 2, 3, 4, 5])# 实现卡尔曼滤波算法filtered_data = []for obs in observed_data:# 预测步骤x = np.dot(A, x)P = np.dot(A, np.dot(P, A.T)) + Q# 更新步骤K = np.dot(P, np.dot(H.T, inv(np.dot(H, np.dot(P, H.T)) + R)))x = x + np.dot(K, obs - np.dot(H, x))P = np.dot((np.eye(2) - np.dot(K, H)), P)# 保存滤波结果filtered_data.append(x[0, 0])# 打印滤波结果print(filtered_data)```在上述代码中,我们首先定义了卡尔曼滤波模型的参数,包括状态转移矩阵A、观测矩阵H、状态噪声协方差矩阵Q和观测噪声协方差矩阵R。
python deepsort 卡尔曼滤波
python deepsort 卡尔曼滤波Python DeepSORT(Deep learning + SORT)算法是一个多目标追踪算法,利用深度学习和卡尔曼滤波相结合,用于在视频中实时追踪多个目标。
本文将一步一步回答关于这个算法的问题,并提供有关如何实现它的详细说明。
什么是目标跟踪?目标跟踪是指在视频序列中自动识别和追踪特定目标的过程。
这个过程可以用来分析目标的运动模式、位置和轨迹,并用于各种应用领域,如视频监控、自动驾驶和行为分析。
目标跟踪算法旨在处理视频中的目标出现和消失、遮挡和运动模糊等常见问题。
什么是DeepSORT算法?DeepSORT算法是基于目标检测和多目标跟踪的混合方法。
它结合了深度学习的目标检测能力和卡尔曼滤波的动态轨迹估计能力。
DeepSORT使用一个预训练的目标检测器(如YOLO或Faster R-CNN)来识别和定位视频帧中的目标,并使用卡尔曼滤波来进行目标轨迹的预测和更新。
DeepSORT算法的工作原理是什么?DeepSORT算法的工作流程可以分为以下几个步骤:1. 目标检测:使用预训练的目标检测器来检测和定位视频帧中的目标物体。
目标检测器可以是YOLO、Faster R-CNN或其他深度学习模型。
2. 特征提取:对于检测到的每个目标,使用一个特征提取器(例如卷积神经网络)来提取唯一的特征向量。
这些特征向量可以描述目标的外观和形状。
3. 轨迹初始化:将第一帧中的目标检测结果作为轨迹的初始观测值,并使用卡尔曼滤波进行初始化。
卡尔曼滤波使用观测值和当前状态的预测进行迭代,以估计目标的位置和速度。
4. 目标关联:将当前帧中的目标检测结果与已有的跟踪目标进行关联。
这个过程通常通过计算特征向量之间的相似度来完成,例如使用余弦相似度或马氏距离。
5. 状态预测和更新:对于已关联的目标,在卡尔曼滤波的状态更新步骤中,使用当前的目标检测结果更新目标的状态向量。
状态向量包含目标的位置、速度和其他相关信息。
kalman滤波的python实现
kalman滤波的python实现
卡尔曼滤波是一种常用的数据处理技术,它通过对测量和预测数据进行加权平均,从而提高数据的准确性和稳定性。
本文将以人类的视角介绍卡尔曼滤波的Python实现。
我们需要明确卡尔曼滤波的基本原理。
卡尔曼滤波通过对系统状态进行估计和预测,并根据测量数据进行修正,以获得更精确的状态估计结果。
它适用于具有线性动态模型和高斯噪声的系统。
在Python中,我们可以使用NumPy和SciPy库来实现卡尔曼滤波。
首先,我们需要定义系统的状态方程和测量方程。
状态方程描述了系统的动态演化过程,测量方程描述了测量数据与系统状态的关系。
接下来,我们需要初始化卡尔曼滤波器的状态参数,包括状态估计值、协方差矩阵和系统噪声的协方差矩阵。
然后,我们可以通过卡尔曼滤波的预测和修正步骤来更新状态估计值和协方差矩阵。
预测步骤中,我们使用状态方程对系统的下一时刻状态进行预测,并更新协方差矩阵。
修正步骤中,我们使用测量方程将测量数据与预测结果进行比较,从而修正状态估计值和协方差矩阵。
我们可以通过卡尔曼滤波器得到经过滤波后的状态估计值和协方差矩阵,并进行进一步的分析和应用。
总结一下,卡尔曼滤波是一种强大的数据处理技术,它可以有效地
处理线性动态系统中的测量数据。
通过Python的实现,我们可以灵活地应用卡尔曼滤波算法,并对系统的状态进行精确的估计和预测。
希望本文对您理解卡尔曼滤波的Python实现有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于集合卡尔曼滤波的PyWOFOST模型
在东北玉米估产中的适用性验证
摘要:以叶面积指数(LAI)为结合点,引入基于集合卡尔曼滤波(Ensemble Kalman Filter,EnKF)的作物模型一遥感信息耦合模型PyWOFOST,利用气象数据、农业气象记录观测表
数据及MODIS LAI数据检验PyWOFOST模型在东北玉米种植区的适用性
遥感和作物模型的结合研究方法包括驱动法,即直接将遥感反演值代人到作物模型中驱动模型的运转,以及数据同化法,即通过调整模型中与作物生长发育和产量形成密切相关的、其它方法难以获得的初始条件和参数来缩小遥感观测值与相应的模型模拟值之间的差距,从而达到估计这些初始值和参数值的目的,简称同化法。
EnKF是顺序数据同化方法的经典代表,与连续数据同化方法相比,顺序同化方法充分考虑了观测误差及模型误差,即观测和模型的不确定性。
1 资料和方法
集合卡尔曼滤波原理:《条件植被温度指数的四维变分与集合卡尔曼同化方法》WOFOST模拟得到的逐日LAI集合即为A(预报矩阵),MODIS LAI集合即为观测向量D。
1.4.2 模型参数的同化
选取LAI作为遥感信息和作物模型的结合点,即通过同化外部观测的LAI序列(MODIS LAI 数据)和WOFOST模拟的LAI序列,当使两个序列差值绝对值之和(即目标函数)最小时的参数,即为最优参数,在此最优参数下作物模型模拟得到的产量即为最佳产量。