基于以太网伺服运动控制卡
运动控制卡方案
运动控制卡方案引言运动控制卡是一种用于控制运动装置和系统的设备,广泛应用于工业自动化、机械加工、仓储物流等领域。
本文将介绍一个基于运动控制卡的方案,以实现精准的运动控制和轴控制。
设备需求在设计运动控制卡方案之前,我们首先需要了解系统的需求。
运动控制需求1.实现多轴运动控制2.支持多种运动类型,如直线运动、圆弧运动等3.实现高速、高精度的运动控制4.支持实时的数据传输和监测I/O 控制需求1.支持外部信号输入和输出控制2.实现输入信号的采集和处理3.支持外部设备的控制和通信网络通讯需求1.支持以太网通讯,实现与上位机的数据交互2.实现数据的传输和通信协议运动控制卡方案基于以上需求,我们设计了一个基于运动控制卡的方案,具体包括以下几个方面。
控制卡选择在运动控制卡的选择上,我们推荐使用一款功能强大、性能稳定的控制卡。
常见的运动控制卡品牌有Advantech、Beckhoff、Galil等。
根据具体需求和预算,可以选择不同型号的运动控制卡。
一般情况下,控制卡需要支持PCI或PCIe接口,以便与计算机进行连接。
运动控制软件在运动控制卡方案中,软件是一个关键部分,决定了系统的功能和性能。
我们可以选择使用现成的运动控制软件,如TwinCAT、MotionPro等,也可以根据需求自行开发。
无论选择哪种方式,软件应该能够实现多轴控制、多种运动类型以及高速、高精度的控制。
此外,软件还应该支持实时数据传输和监测。
伺服驱动器和电机选择在运动控制方案中,伺服驱动器和电机的选择也是至关重要的。
根据系统的需求,我们可以选择不同型号和尺寸的伺服驱动器和电机。
常见的品牌有Mitsubishi、Panasonic、Yaskawa等。
伺服驱动器和电机的选型应该考虑到系统的运动范围、负载能力和控制精度等因素。
总结运动控制卡方案是实现精准运动控制和轴控制的关键技术之一。
本文介绍了基于运动控制卡的方案设计,包括控制卡选择、运动控制软件和伺服驱动器与电机的选型。
基于EtherCAT总线的高速高精度多轴伺服运动控制器
【 关键词 】 E t h e r C A T;S T M3 2 ;高速高精度;运动控制器;数控 系 统
通过运行在工 控机上的上位机软件 ,上位机运行基 于P C 的
1 引 言
QT图形操 作系 统 ,可 以设 置运动 控制 参数 、实 时显示 加 工进
度 、 系 统 的运 行 状 态 。上 位 机 将 导 入 的C AD图 纸 读 取 后 , 转 化
E L E C T R ONI C S WOR L D・ 探素与观察
基{E t h e r C A T 总线的高速高精度多轴伺服运动控制器
广东工业大学 自 动化学院 栾 伟 易勇帆 王钦若
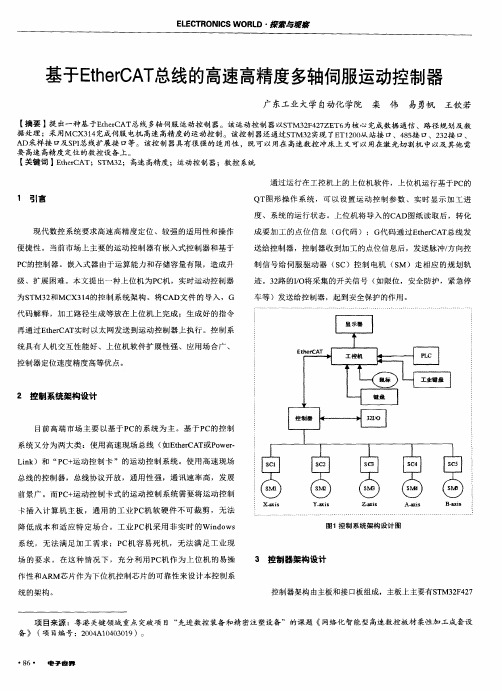
【 摘要 】 提 出一种基于E t h e r c A T 总线多轴伺服运动控 制器 。该运动控制 器 以s T M3 2 F 4 2 7 z E T 6 为核心 完成数 据通信 、路径 规划及数
・8 6・
t 皇子 啬 , -
作 为主 控 芯 片 ,MC X3 1 4 和MC X 5 0 1 作为 专用 的运 动控 制 芯片 ;主
w a i t ( 0 x 3 ) ;
控芯片与专用运动控制芯片之间通过F S MC 总线连接,对其读写命 令和数据 。主控板和接 口板通过接插件进行连接 。 接 口板上 主要 分布E T1 2 0 0 从 站通 讯模块 电路 , 电源转换 模 块 电路 ,信 号 隔离 模块 电路 ( 高速磁 耦 隔离 和低 速 光耦 隔 离 ),AD7 6 0 6 采样模块电路,2 3 2 / 4 8 5 通讯模块 电路等 。
据 处理 ;采 用Mc x3 1 4 完成伺服 电机 高速 高精度 的运 动控 制。该控制 器还通过 s T M3 2 实现 了E T1 2 o 0 从站接 口、4 8 5  ̄ - 口、2 3 2 接 口、 A D采样接 口及s P I 总线扩展接 口等 。该控 制器具有很强 的适 用性 ,既 可以用在 高速数控 冲床 上又可 以用在激光切 割机 中以及其他 需 要 高速 高精度定位的数控 设备上。
ADT-8840硬件说明书

8
ADT-8840 控制卡用户手册
�
Axis Y 端口定义(Y 轴脉冲与方向)
JCP2 PUCOM EXT_VCCA +24V 24VGND Y ECA+ YECAY ECB+ YECB1 9 2 10 3 11 4 12 5 13 6 14 7 15 8 DB15 15 ( ) YPU+ YPUYDR+ YDRY ALARM OUT19 YECZ+ YECZ-
线号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
名称 YPU+ YPUYDR+ YDRYALARM (IN35) OUT19 YECZ+(IN39) YECZ-(IN39) EYT_VCCA +24V 24VGND YECA+(IN44) YECA-(IN44) YECB+(IN45) YECB-(IN45) Y 轴脉冲信号+ Y 轴脉冲信号Y 轴方向信号+ Y 轴方向信号-
� 电气规格
开关量输入:
通道:32 ,全部光耦隔离。 输入电压:5-24V 高电平>4.5V 低电平<1.0V 隔离电压:2500V DC 光耦输入延时时间:不大于 0.1ms
计数输入:
通道:4AB 相编码输入 ,全部光耦隔离。 (与 8 个输入开 关量复用) 。 最高计数频率:2MHz 输入电压:5-24V 高电平>4.5V 低电平<1.0V 隔离电压:2500V DC
3
第二章
电气连接
� JB 端口定义(17-33 输入)
4
ADT-8840 控制卡用户手册 线号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 名称 INCOM2 IN17 IN18 IN19 IN20 IN21 IN22 IN23 IN24 IN25 IN26 IN27 IN28 IN29 IN30 IN31 IN32 IN33 普通输入 17 ~ 33 (注意它的顺序,请参考板上丝印) 功能 输入公共端 2(请将它接到+12V 到+24V 电源)
运动控制卡是什么?有什么优点?
运动控制卡是什么?有什么优缺点?
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。
利用高性能微处理器及大规模可编程器件,运动控制卡可以实现对伺服电机的高性能多轴协调控制,能够发出连续且高频率的脉冲,并通过改编脉冲的频率来控制电机的速度。
作为基于PC机的上位控制单元,运动控制卡在专机系统的开发过程中,具有更大的灵活性和开放性。
在此基础上,程序员也能开发出功能强大的运动控制系统。
正因为以上的特点,专业运动控制卡不仅在机床行业得到大量推广使用,而且在在许多小型专机系统中也得到广泛地应用。
运动控制卡的优势
界面友好:运动控制卡是基于PC平台而制作的,由此而制作的软件界面通常都会比较直观便捷,可以让没有或者基础薄弱的初学者,也能在简单培训之后快速上手,学会如何操控机床。
拓展性强:除去本身已具备的功能之外,客户拿到运动控制卡后,还可以利用底层的函数数据库对运动控制卡进行二次开发和编程,以更好的适应加工需要。
也正是这个原因,使得运动控制卡的应用范围非常广泛,从轻工业到重工业均有大规模使用。
成本更低:除了运动控制卡外,还有嵌入式运动控制器、纯软件PLC等其他运动控制解决方案,比如德国倍福这类外国企业就经常使用这种方式,这类控制方式虽然性能更好,但销售上捆绑较多,价格也十分昂贵,性价比并不高。
运动控制卡的劣势
环境影响大:由于运动控制卡是通过板卡+电脑的组合式使用,所以在遇见现场环境复杂的情况下,容易出现稳定性不足的情况。
比如粉尘或油污会导致连接线路失效等问题,又或者是振动导致连接松动,在强电强辐射环境,则更容易出现数据丢失等问题。
基于以太网的运动控制卡通信模块设计
基于以大网的运动控制卡通信模块设计杨亮亮12 !李翔史伟民!!鲁文其1(!浙江理工大学机械与自动控制学院,杭州310018;2.杭州汇苹智能科技有限公司,杭州311121)摘要:针对高速高精度运动控制系统对数据采集和传输速度的需求,设计并实现了一种基于DSP和以太网芯片W5100S的运动控制卡。
该文详细论述了上位P C和下位机运动控制卡的通信模块的设计,包括硬件结构、软件框架等。
同时,针对U D P协议本身存在的不可靠性,设计了一套简单、高效的通信协议,保证了传输链路的可靠性,确保了数据的完整性和正确性。
针对多机通信的需求,介绍了一种基于C++的局域网IP地址扫描的实现方法。
该方法通用性好,可移植性强,具有一定的参考意义。
关键词#以太网芯片;运动控制卡;通信模块;通信协议;I地址扫描中图分类号:TP23 文献标识码:A文章编号#1000 -0682(2020"03 -0024 -05DesijFn of communication module of motion control card based on EthernetYANG Liangliang1,2,LI Xiang1,SHI Weimin1,LU Wenqi1(1. Faculty o f Mechanical Engiiwering and Automation, Zhejiang Sci - Tech University, Hangzhou 310018 ,China;2. Mstar Technologies,Inc. , HangzZoo 311121, China #A bstra c t:A motion control card based on DSP and Etliemet chip W5100S is designed and implemented to meet t lie demand of high speed and high precision motion control system for data acquisitionand transmission speed.In this paper,the design of communication module between host PC and s motion control card i s discussed in detail,including hardware structure and software framework.At thesame tim e,aiming at the unreliability of UDP protocol itse lf,a set of simple and efficient communication protocol is designed to ensure the reliability of transmission lin k and the integrity and correctness of data.According to the requirement of m ulti - machine communication,this paper introduces an implem method of LA N IP address scanning s oftware based on C ++.This method has good generalityb ility,and has certain reference significance.Keywords:Etliemet chip;motion control card;communication module;communication protocol;IPaddre<<canning〇引言随着计算机技术和微电子技术的快速发展,作 为现代工业自动化技术关键组成部分,对控制系统 的速度和精度提出了更高的要求。
基于EtherCAT的多轴运动控制器

含义 接收方MAC地址 发送方MAC地址
0x88A4 数据区长度,即子报文长度加和 1,代表与从站通信,其余保留
循环冗余校验和
EtherCAT没有重新定义新的以太网帧结构,而是在 标准以太网帧结构中使用了一个特殊的以太网帧类型 0x88A4,采用这种方式可以使控制数据 直接写入以太网 帧内,并且可以与遵守其它协议的以太网帧在同一网络 中并行。一个EtherCAT帧中可以包含若干个EtherCAT子 报文,报文结构如图3,各部分含义见表2,每个报文都 服务于一块逻辑过程映像区的特定内存区域,由FMMU (Fieldbus Memory Management Unit,负责逻辑地址与 物理地址的映射)寄存器和SM(Sync Manager,负责对 ESC和微处理器内存的读写)寄存器定义,该区域最大可 达4GB字节。EtherCAT报文由一个16位的 WKC(Working Count)结束,其数据区最大长度可达1486 个字节。在报文头中由8位命令区数据决定主站对从站的 寻址方式,由于数据链独立于物理顺序,因此可以对 EtherCAT从站进行任意的编址。
现场总线)是德国BECKHOFF公
司提出的实时工业以太网技术.
•
它基于标准的以太网技术,具
备灵活的网络拓扑结构,系统配置
简单,具有高速、高有效数据率等
特点,其有效数据率可达90%以上.
EtherCAT产品
1.1 EtherCAT系统组成和工作原理
• EtherCAT采用主从式结构, • 主站PC机采用标准的100Base-TX以太网卡, • 从站采用专用芯片。 • 系统控制周期由主站发起,主站发出下行电报.数
• 从站控制器与主站交换两种形式的数据,
• 一种是周期性数据,
正运动技术-《ECI0032控制卡硬件手册》

ECI0032网络控制卡硬件手册Version 1.1版权说明本手册版权归深圳市正运动技术有限公司所有,未经正运动公司书面许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
涉及ECI控制器软件的详细资料以及每个指令的介绍和例程,请参阅ZBASIC软件手册。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,正运动公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,正运动公司没有义务或责任对此负责。
目录ECI0032网络控制卡硬件手册 (1)第一章控制卡简介 (1)1.1连接配置 (1)1.2安装和编程 (2)1.3产品特点 (2)第二章硬件描述 (2)2.1ECI0032系列型号规格 (2)2.1.1订货信息: (3)2.2ECI0032接线 (4)2.2.1电源/CAN接口信号: (5)2.2.2RS232接口: (6)2.2.3通用输入信号 (6)2.2.3.1输入0-7: (7)2.2.3.2输入8-15: (7)2.2.4通用输出信号 (8)2.2.4.1输出0-7 (8)2.2.4.2输出8-15 (8)第三章扩展模块 (9)3.1ZCAN从协议配置: (9)3.2与控制器连接接线参考: (10)3.3与扩展模块CAN总线、输入输出、电源接线参考: (11)第四章常见问题 (11)第五章硬件安装 (12)5.1ECI0032安装 (12)第一章控制卡简介ECI是正运动技术推出的网络运动控制卡型号简称。
ECI0032系列控制卡采用优化的网络通讯协议可以实现实时的运动控制。
1.1连接配置典型连接配置图ECI网络运动控制卡支持以太网,232通讯接口和电脑相连,接收电脑的指令运行,通过CAN总线可以连接各个扩展模块,从而扩展输入输出点数或运动轴(CAN总线两端需要并接120欧姆的电阻)。
EMC5000网络控制卡硬件手册说明书
EMC5000网络控制卡硬件手册Version 1.3版权说明本手册版权归深圳市浩川自动化技术有限公司所有,未经浩川自动化公司书面许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
涉及EMC控制器软件的详细资料以及每个指令的介绍和例程,请参阅VBASIC软件手册。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,浩川自动化公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,浩川自动化公司没有义务或责任对此负责。
目录EMC5000网络控制卡硬件手册 (1)第一章控制卡简介 (1)1.1 连接配置 (1)1.2 安装和编程 (2)1.3 产品特点 (2)第二章硬件描述 (3)2.1 EMC5000系列型号规格 (3)2.1.1 订货信息: (3)2.2 EMC5000接线 (5)2.2.1 电源接口CN16: (6)2.2.2 CAN接口CN17: (6)2.2.3 RS232接口CN12: (7)2.2.4 通用输入信号: (8)2.2.4.1 输入CN9: (8)2.2.4.2 输入CN11: (9)2.2.5 通用输出 CN10: (10)2.2.6 ADDA信号 CN14 (11)2.2.7 轴接口信号: (11)2.2.7.1 轴0-7 CN1-CN8 (11)2.2.7.2 辅助编码器CN15 (13)2.2.7.3 低速差分脉冲口和编码器接线参考: (14)2.2.7.4 高速差分脉冲口和编码器接线参考: (16)第三章扩展模块 (18)3.1 扩展模块CAN总线、输入输出、电源接线参考: (18)第四章常见问题 (18)第五章硬件安装 (19)5.1 EMC5000安装 (20)第一章控制卡简介EMC是浩川自动化技术推出的网络运动控制卡型号简称。
EMC5000系列控制卡支持最多达16轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴、机械手指令等;采用优化的网络通讯协议可以实现实时的运动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于以太网的高性能四轴伺服运动控制卡
一、基本性能参照表
卡型号XK2416-Eth-A1
轴数 4
数字输入、数字输出共32路(可编程)
编码器 4
直线插补任意2~4轴
圆弧插补任意2轴
连续插补有
最大脉冲频率 6.5Mpps
基本功能直线/S型加减速,运动中可变速、变位置,直线插补,急停,
连续插补,圆弧插补,G代码加工,32路可编程输入/输出
二、主要特征
输出脉冲可以设定为普通脉冲(脉冲加方向)或双脉冲模式,输出逻辑也可以选择。
可实现任意2~4轴线性插补以及任意两轴圆弧插补。
运动中可实时改变速度及目标位置。
提供线性加减速和S曲线加减速功能。
消除速度曲线中的尖角即最大速度校正功能
预置运动数据功能。
在执行一个运动过程时,可以将接下来的两个要执行的运动参数写入芯片的缓冲区。
软件限位功能。
间隙补偿功能
打滑校正功能。
同时启动和同时停止功能
减振功能
手轮控制功能
操作开关直接控制功能
失步检测功能
空转脉冲输出功能
操作模式有:连续、定长、回原点运动以及线性插补和圆弧插补。
通过相应的设置,还可以使用以下模式:通过指令启动/停止;用手轮脉冲输入实现连续和定长运动;用操作开关信号启动连续运动或定长运动;回原点运动;用指令实现定长运动;通过外部信号实现硬件启动定长运动;通过外部信号触发改变目标位置。
运动中可实时读取逻辑位置、实际位置、驱动速度、加速度、驱动状态。
可接受伺服驱动器的各种信号:如编码器Z相信号、到位信号、报警信号、误差清除信号等。
4轴可同动同停,具有紧急停止输入信号。
支持windows95/98/NT/2000/XP/WIN7、linux等操作系统。
支持C/BC++/VC/VB/C++Builder/Labview等开发工具编程。
三、应用环境
操作温度:0~60℃
储存温度:-20~80℃
湿度:5~95% 无凝结
四、接线示意
五、应用领域
可以服务于各个行业,从精密到微米级的设备到上千马力的重型设备。
应用包括应用包括::
外部信号触发的多轴位置锁存功能。
手轮和外部信号操作功能。
急停输入急停输入::
提供硬件及软件紧急停止功能。
既可外部输入紧急停止信号,也可软件输入紧急停止指令,立即停止脉冲信号输出。
紧急停止后,必须执行回零操作使指定位置与机械位置相符。
开发库及操作系统开发库及操作系统::
支持windows95/98/NT /2000/XP/WIN7、linux 等操作系统。
支持C /BC++/VC /VB /C++Builder /Labview 等开发工具编程。