adams_挖掘机建模过程及运动仿真
adams教程

adams教程Adams教程-基本概念与应用Adams是一种重要的多体动力学仿真软件,广泛应用于机械工程、汽车工程、航空航天工程等领域。
本教程将介绍Adams的基本概念和应用,帮助读者快速入门并掌握该软件的基本操作技巧。
1. Adams简介Adams是一种基于多体动力学理论的仿真软件,能够模拟和分析复杂的机械系统的运动和力学行为。
它采用了基于弹簧、阻尼和惯性模型的多体动力学算法,能够准确地预测系统的运动轨迹、速度、加速度等关键参数。
2. Adams界面与基本操作Adams的界面直观友好,主要包括模型空间、运动学仿真、力学仿真等模块。
在模型空间中,可以创建和修改机械系统的模型;在运动学仿真模块中,可以模拟系统的运动轨迹;在力学仿真模块中,可以分析系统的力学特性。
3. 创建模型与约束在Adams中,模型的创建是基于几何图形和物体的属性。
可以通过导入CAD文件或者手动绘制几何图形来创建模型,并为每个模型设置合适的质量、惯性矩阵等属性。
通过添加约束条件,可以模拟系统中各个物体之间的相对运动关系。
4. 仿真与结果分析一旦模型和约束设置完成,就可以进行仿真分析了。
Adams提供了多种仿真方式,如动态仿真、静态仿真、优化仿真等。
仿真结果可以通过图表、动画等形式进行展示和分析,帮助工程师深入理解系统的运动行为和受力情况。
5. 应用案例最后,本教程将通过一些实际应用案例来展示Adams的具体应用。
例如,利用Adams模拟汽车悬挂系统的运动特性,预测系统在不同路况下的动力学行为;利用Adams模拟飞机起飞和着陆过程,评估系统在不同条件下的稳定性和安全性等等。
通过本教程的学习,读者将能够掌握Adams的基本操作技巧,理解多体动力学仿真的基本原理,并能够利用该软件进行机械系统的仿真分析。
希望读者能够通过这些知识和技能,在工程领域取得更好的成果。
基于ADAMS仿真技术的挖掘机铰点受力分析
2009年 6月郑州大学学报(工学版)Jun 1 2009第30卷 第2期Journal of Zhengzhou University (Engineering Science )Vol 130 No 12 收稿日期:2008-09-27;修订日期:2008-12-11 作者简介:周宏兵(1967-),女,湖南湘阴人,中南大学副教授,博士,主要从事工程机械机电液一体化技术方面的研究,E -mail:zhbjcr@yahoo . 文章编号:1671-6833(2009)02-0071-04基于ADA MS 仿真技术的挖掘机铰点受力分析周宏兵1,2,胡雄伟1,孙永刚1,王惠科1(1.中南大学机电工程学院,湖南长沙410083;2.湖南山河智能机械股份有限公司,湖南长沙410100)摘 要:为了获得挖掘机工作时主要铰接点处的连续受力变化值,利用Pr o /E 4.0和ADAMS 2005两种软件,建立了S W E90U 液压反铲挖掘机的虚拟样机.在虚拟环境中,分别模拟了该挖掘机的铲斗挖掘、斗杆挖掘和平整操作3种典型工作状态,并针对该挖掘机的4个主要铰接点的受力情况进行了分析研究,得到了一系列相应的铰接点受力变化曲线.结果表明,动臂与斗杆铰接点的受力情况变化最为剧烈,而摇杆与斗杆铰接点的受力情况变化最为平缓.关键词:ADAM S;液压挖掘机;仿真;铰点中图分类号:T U 621 文献标识码:A0 引言由于液压挖掘机工作状况的复杂性,其工作装置的受力情况也相当复杂.过去,人们往往只能按照由经验所确定的工作位置来研究挖掘机各铰接点的受力情况,得到仅是一些离散的、特定位置的受力值,难以完整地反映实际情况,且其正确性尚值得商榷[1-2].随着计算机辅助设计技术的发展,虚拟样机技术已广泛应用于各个领域[3].但目前针对挖掘机铰点受力的仿真研究还比较少,且还停留在单一工况研究上.笔者采用ADAMS的多刚体动力学模型[4],其数学形式为一系列以各刚体运动位置、姿态、速度和加速度为变量的非线性微分动力学方程,以及由各个约束所形成的非线性代数方程.对这些方程进行联立数值积分求解即可获得各离散时刻各刚体运动的位移、速度和加速度等运动物理量以及各铰接点处的约束反力等信息.1 虚拟样机的建立1.1 Pr o /E 三维实体模型的建立挖掘机的主要结构包括机身、动臂装置、斗杆装置、铲斗装置,其机构拓扑图如图1所示.根据S W E90U 挖掘机的设计图纸,采用三维实体造型软件Pr o /E,逐一建立上述构件的实体模型,并使用自底向上的装配方法完成整个挖掘机的实体模型.为了提高在ADAMS 中的计算效率,在建立模型时对实物进行了必要的简化,如省略了与研究无关的推土板和销钉、卡环等细小构件.图1 挖掘机机构拓扑图F i g .1 Topolog i ca l graph of the excava tor m echan is m1.2 ADAMS 虚拟样机的建立在Pr o /E 环境中,将建立的挖掘机整机模型保存为Paras olid 格式的文件,然后进入ADAMS 环境,在File 菜单选择I m port 命令将之导入.导入到ADAMS 中的模型很好地继承了原来Pr o /E 模型的各种属性,包括位置关系、质心位置、转动惯量和质量信息,但是模型中原有的装配关系已不复存在,各零件只是按原来的位置关系独立地存在于ADAMS 环境中[6],因此必须通过添加约束来将它们重新装配起来.所添加的具体约束情况如下:在机身与Gr ound 之间添加固定副,在各连接铰点处添加转动副,在各油缸和其活塞杆之间添加移动副.在各72 郑州大学学报(工学版)2009年移动副上添加驱动,并将动臂油缸移动副驱动、斗杆油缸移动副驱动、铲斗油缸移动副驱动分别重命名为dongbiqudong 、douganqudong 和chandouqu 2dong .设置长度单位为m,力的单位为N;设置重力的方向为-Y 向,即竖直向下的方向,大小为-9.80665m /s 2.完成后的虚拟样机模型如图2所示.图2 虚拟样机模型F i g .2 V i rtua l Prototype2 工作状况仿真与分析液压反铲挖掘机用途广泛,不仅可以进行基坑挖掘,还可以进行针对施工面的平整、压实等操作.下面将针对挖掘机的3种工作状况进行仿真与分析.2.1 铲斗挖掘工况仿真由文献[1]知,当挖掘机采用铲斗挖掘方式工作时,铲斗挖掘阻力的最大切向分力可用下式表示:F t m ax =C [R (1-cos <max )]1.35BA ZX +D (1)式中:C 为土壤的硬度系数;R 为铲斗切削半径,c m ;<max 为挖掘过程中铲斗总转角的一半;B 为切削刃宽度影响系数,B =1+2.6b ;b 为铲斗平均宽度,m ;A 为切削角变化影响系数,一般取A =1.3;Z 为斗齿影响系数,有齿时,Z =0.75;X 为斗侧壁厚度影响系数,X =1+0.03s,其中s 为侧壁厚度,c m ;D 为切削刃挤压土壤的力,根据斗容量的大小在D =10000~17000N 的范围内选取.对于S W E90U 挖掘机,取<max =55°,R =105c m ,b =0.68m ,Z =0.75,s =2c m ,D =10100N ,由式(1)可得,F t max =48866.3N .铲斗挖掘阻力的法向分力F n 数值较小,一般F n =0~0.2F t ,土质越均匀,F n 数值越小.在此,取F nmax =0.2F t max =9733.26N .这种工作方式下,铲斗对土壤的切削方式为大曲率切削,挖掘阻力与挖掘深度基本上成正比.由于挖掘的前半过程的切削角不利,会产生较大的阻力,因此挖掘阻力的最大值将出现在挖掘过程中间偏前的位置.根据S W E90U 挖掘机的工作情况按位移方式设置各液压缸的驱动函数如表1所示,它们将使虚拟样机完成从图2所示姿态开始采用铲斗挖掘方式进行基坑挖掘,满斗后提升至装车高度的一系列动作.表1 铲斗挖掘的驱动及阻力函数Tab .1 Functi ons of moti ons and resist ances i n bucket di gg i n g项目函数表达式Dongbiqudong step (ti m e,0.8,0,1.6,-0.19)+step (ti m e,6.3,0,9,0.4207)Douganqudong step (ti m e,0,0,0.5,-0.118)+step (ti m e,6.3,0,9,0.429)Chandouqudongstep (ti m e,0,0,1.6,-0.31)+step (ti m e,1.6,0,6.3,0.68)F t step (ti m e,1.6,0,3.25,48866.3)+step (ti m e,3.25,0.5,-48866.3)F n step (ti m e,1.6,0,3.25,9733.26)+step (ti m e,3.25,0,5,-9733.26)G wstep (ti m e,2.3,0,6.3,4802) 根据前述原因和油缸驱动过程,相应地设置铲斗挖掘阻力的切向分力F t 的函数、法向分力F n 的函数和挖掘过程中铲入铲斗的物料重力G w的函数如表1所示.其中,切向分力的方向始终垂直于铲斗切削半径R,法向分力始终沿着铲斗切削半径R,它们的具体方向将随铲斗位置的变化而变化,而物料重力的方向则总是竖直向下的.采用以上设置进行仿真,得到各铰接点受力的变化曲线如图3(a )所示.1.6s 时,铲斗活塞杆由原来的回缩状态开始转向外伸状态,推动铲斗进行挖掘,速度变化较大,因此各铰点受力曲线都出现了一个较小的峰值;3.25s 左右,挖掘阻力达到峰值,各铰点也基本处于最大受力状态,其中动臂与斗杆铰接点的受力高达290150N;5.6s 后,铲斗挖掘基本结束,机构运动仅受挖入铲斗的物料重力的影响,各铰点受力都维持在一个较小值.2.2 斗杆挖掘工况仿真由文献[1]知,当挖掘机采用斗杆挖掘方式工作时,斗杆挖掘的切向阻力可按下式计算:W t =K 0q0.01745r φK s(2)式中:K 0为挖掘比阻力;q 为铲斗容量;r 为斗杆挖掘时的切削半径,即动臂与斗杆铰点至斗齿尖的距离;K s 为土壤松散系数;φ为斗杆在挖掘过程中的总转角. 第2期周宏兵等 基于ADAMS 仿真技术的挖掘机铰点受力分析73 这种工况下,斗齿对土壤的切削行程比较长,切土厚度在挖掘过程中可以看作常数,因此斗杆挖掘阻力也可以当作常数处理.一般,切削厚度较小,所以斗杆挖掘阻力比铲斗挖掘阻力小得多.对于S W E90U 挖掘机,q =0.28m 3,当r =2.5719m 时,取K 0=13×104N /m 2,K s =1.14,φ=73°,由式(2)可得,W t =9747N .根据经验公式W n =ψW t ,ψ为常系数,在此取ψ=0.62,得W n=6043.15N .与铲斗挖掘时类似,设置各液压缸的驱动函数如表2所示,它们将使虚拟样机完成从图2所示姿态开始采用斗杆挖掘方式进行基坑挖掘,满斗后提升至装车高度的一系列动作.相应设置斗杆挖掘阻力的切向分力W t 的函数、法向分力W n 的函数和挖掘过程中铲入铲斗的物料重力G ′w 的函数如表2所示.仿真后得到各铰接点受力的变化曲线如图3(b )所示.表2 斗杆挖掘的驱动及阻力函数Tab .2 Functi on s of m oti on s and resist ances i n ar m d i gg i n g项目函数表达式Dongbiqudong step (ti m e,0.5,0,1.3,-0.19)+step (ti m e,4.8,0,7.5,0.4207)Douganqudongstep (ti m e,0,0,0.5,-0.1117)+step (ti m e,1.3,0,4.0,0.5704)Chandouqudongstep (ti m e,0,0,0.3,-0.0517)+step (ti m e,4.0,0,4.8,0.1168)+step (ti m e,4.8,0,7.5,0.2542)W t step (ti m e,1.2,0,1.3,9747)+step (ti m e,4,0,4.3,-9747)W nstep (ti m e,1.2,0,1.3,6043.1)+step (ti m e,4,0,4.3,-6043.1)G ′wstep (ti m e,1.5,0,4.8,4802) 1.3s 至4.0s,斗杆活塞杆外伸推动斗杆进行挖掘,由于挖掘阻力的作用,各铰点受力都处于较大值,其中动臂与斗杆铰接点受力最为复杂,最大值达到134180N;4.8s 时,为防止铲入斗内的物料撒出,铲斗液压缸进行了速度的调整,因此各铰点受力都出现了一个较小的波动.2.3 平整操作工况仿真当挖掘机进行施工面平整操作时,一般要求挖掘角恒定,铲斗在平整面上做平动,铲斗末端速度保持匀速,但为防止冲击,一般在起始阶段匀加速,而终止阶段匀减速[7].此时铲斗的斗齿所受到的阻力主要是切向的碎土旁移阻力,其数值很小.当遇到小石块等障碍物时,阻力值可能会瞬时增大.因此,设置阻力函数为:step (ti m e,0,0,0.7,600)+step (ti m e,2.1,0,2.15,1200)+step (ti m e,2.15,0,2.2,-1200)+step (ti m e,3.2,0,3.6,800)+step (ti m e,3.6,0,3.8,-800)+step (ti m e,4.5,0,4.55,600)+step (ti m e,4.55,0,4.6,-600)平整操作属于精细作业,我们无法估计其各驱动油缸的具体运动,但铲斗的运动却非常简单,因此可以通过在铲斗尖施加点驱动带动各驱动油缸运动,利用ADA MS 强大的测量功能得到它们的运动曲线,然后在后处理模块中将得到的运动曲线转化为驱动油缸运动的样条函数,用这些函数定义各油缸的驱动函数.本次仿真中用到的点驱动函数和转换后得到的各油缸驱动函数如表3所示.表3 平整操作的驱动函数Tab .3 Functi on s of m oti on s i n s m ooth opera ti on项目函数表达式点驱动(速度方式)TraX:step (ti m e,0,0,0.7,-0.2)+step (ti m e,6.3,0,7,0.2)TraY:03ti m e RotZ ″:03ti m eDongbiqudong AKI SP L (ti m e,0,SP L I N E_1,0)DouganqudongAKI SP L (ti m e,0,SP L I N E_2,0)Chandouqudong AKI SP L (ti m e,0,SP L I N E_3,0)74 郑州大学学报(工学版)2009年 仿真后得到各铰接点受力的变化曲线如图3(c )所示.在2.15s 、3.6s 、4.55s 时,由于阻力的突变,各铰点受力曲线也表现出了相应的突变,受力最大的铰点依然是动臂与斗杆铰接点,但其最大值也仅18825N.总的来说,这种工况下各铰点受力比较平稳,动臂与斗杆铰接点的受力和摇杆与斗杆铰接点的受力有减小的趋势,而斗杆与铲斗铰接点的受力和连杆与铲斗铰接点的受力有增大的趋势.由图3可知,发现液压挖掘机在上述3种工况下工作时主要铰点的受力具有如下共同规律:(1)各铰点的受力情况跟随挖掘阻力的变化而变化,其峰值也几乎与阻力的峰值出现在同一时刻.(2)动臂与斗杆铰接点受力情况变化最为剧烈,且峰值最大.因此,设计时可考虑采取相应加固措施,如适当增加此处连接销的直径、增厚连接处的钢板等.(3)摇杆与斗杆铰接点的受力曲线较平缓,其峰值也仅超出主要阻力一个较小值.3 结束语将三维造型软件Pr o /E 和系统运动学/动力学分析软件ADAMS 相结合,建立了液压挖掘机的虚拟样机模型,弥补了ADAMS 在实体建模能力上的不足,使系统模型的修改更加方便和直观.利用虚拟样机技术对挖掘机的工作状况进行仿真分析,能够得到各铰接点处连续的受力变化情况,更接近实际,克服了传统计算方法的不足.参考文献:[1] 同济大学.单斗液压挖掘机[M ].第二版.北京:中国建筑工业出版社,1986.[2] 朱志辉,周志革,王金刚,等.液压挖掘机工作装置的建模及动力学仿真[J ].机械设计与制造,2006,(8):158-159.[3] 石明全,薛运锋,陈维义,等.某发动机的参数化动态仿真分析[J ].郑州大学学报:工学版,2005,26(3):79-82.[4] 王国强,张进平.虚拟样机技术及其在ADAM S 上的实践[M ].西安:西北工业大学出版社,2002.[5] 张卧波,杨俊峰.挖掘机工作及运动状态的仿真与应用研究[J ].农业工程学报,2008,24(2):149-151.[6] 秦 成,史淑玲.挖掘机摇臂机构的虚拟样机研究[J ].机械工程师,2008,(3):133-134.[7] 张大庆.液压挖掘机工作装置运动控制研究[D ].长沙:中南大学机电工程学院,2007:38-41.Ca lcul a ti on of the Force Acted on H i n ged Jo i n ts of the Hydrauli cExcava tor Ba sed on ADAM SZHOU Hong -bing 1,2,HU Xi ong -wei 1,S UN Yong -gang 1,WANG Hui -ke1(1.School of Mechanical &Electrical Engineering,Central South University,Changsha 410083,China;2.Hunan I ntellectualFacultiesM echanical Co .L td .,Changsha 410100,China )Abstract:I n order t o obtain the continuous value of the f orce acted on key hinged j oints in a working excava 2t or,this paper uses Pr o /E4.0and ADAMS 2005t o build up the virtual p r ot otype of the hydraulic backhoe ex 2cavat or S W E90U.I n the virtual envir on ment,the si m ulati on of three typ ical working (bucket digging,ar m digging and s mooth operati on )and the study of the force acted on f our key hinged j oints of this excavat or are accomp lished,then,a series of corres ponding curves of the f orce acted on the hinged j oints is got .The results show that the change of the force acted on the j oint bet w een boom and ar m is the most vi olent,but the change of the f orce acted on the j oint bet w een r ocker and ar m is the flattest .Key words:ADAMS;hydraulic excavat or;si m ulati on;hinged j oints。
ADAMS运动学分析

ADAMS运动学分析简介ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于进行多体动力学仿真分析的软件。
它是一种基于动力学原理的分析方法,可以用于研究物体的运动与力学关系。
本文档将介绍ADAMS软件的运动学分析功能,并提供一些使用指南。
运动学分析的定义运动学分析是指研究物体运动的位置、速度和加速度等基本特征的分析方法。
ADAMS通过求解物体的运动方程,从而得到物体在运动过程中的位置、速度和加速度等参数。
运动学分析的基本步骤进行运动学分析通常需要以下几个基本步骤:1.建模:首先需要将待分析的物体建模,并定义其运动学参数,如位置、速度和加速度。
2.添加约束:在ADAMS中,可以通过添加约束来定义物体之间的关系,如连接、限制等。
这些约束可以限制物体的运动方式,从而简化分析过程。
3.定义运动:在ADAMS中,可以通过定义初始条件和施加力来模拟物体的运动。
初始条件可以包括物体的初始位置、速度和加速度,而施加的力可以模拟外部作用力、约束力等。
4.运行仿真:通过设置仿真参数,如仿真时间和步长,来运行仿真模拟。
ADAMS会根据模型和参数进行计算,并输出物体的运动学参数。
5.分析结果:仿真完成后,可以通过ADAMS提供的结果分析工具来查看模拟结果,如位置、速度和加速度等。
ADAMS运动学分析的特点ADAMS作为一款专业的多体动力学仿真软件,具有以下特点:1.精确性:ADAMS采用高精度的求解方法,可以准确地求解物体的运动学方程,从而得到准确的运动学参数。
2.灵活性:ADAMS提供了丰富的建模和约束选项,可以灵活地建立各种复杂的物体模型,并定义各种约束关系。
3.可视化:ADAMS提供了直观的可视化界面,可以对模型进行可视化操作,并实时显示仿真结果。
4.可扩展性:ADAMS支持多种扩展模块和接口,可以与其他CAE软件和编程语言进行集成,方便进行进一步分析和开发。
基于ADAMS的液压挖掘机工作装置仿真研究

s i z e a n d m o t i o n t r a j e c t o r y o f t h e e x c a v a t o r w e r e o b t a i n e d , mo r e o v e r , he t d i s p l a c e m e n t c u  ̄e s o f t h e e x c a v a t o r b u c k e t a n d b e a r i n g f o r c e
t e d i n t o t h e AD AMS t o b u i l d v i r t u l a p r o t o t y p e mo d e l o f t h e e x c a v a t o r .By u s i n g ADAMS s i mu l a t i o n f u n c t i o n,t h e s e q u e n t i a l o p e r a t i n g
mo d e a n d t h e c o mp o u n d a c t i o n o f t h e e x c a v a t o r w e r e s i mu l a t e d k i n e ma t i c ll a y a n d d y n a mi c a l l y .T h r o u g h s i mu l a t i o n, t h e ma i n o p e r a t i o n s
2 0 1 3年 1 1 月
机床 与液压
M ACHI NE T 0OL & HYDRAUL I CS
No v
Vo 1 . 41 No . 21
DO I :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 2 1 . 0 3 6
ADAMS建模与仿真分析
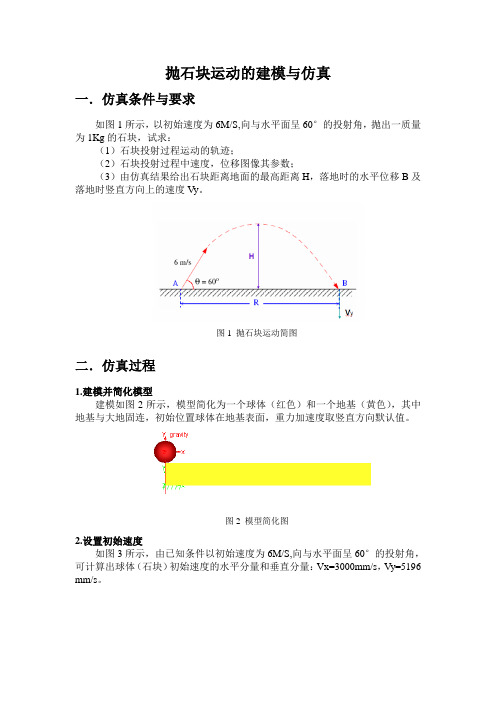
抛石块运动的建模与仿真一.仿真条件与要求如图1所示,以初始速度为6M/S,向与水平面呈60°的投射角,抛出一质量为1Kg的石块,试求:(1)石块投射过程运动的轨迹;(2)石块投射过程中速度,位移图像其参数;(3)由仿真结果给出石块距离地面的最高距离H,落地时的水平位移B及落地时竖直方向上的速度Vy。
图1 抛石块运动简图二.仿真过程1.建模并简化模型建模如图2所示,模型简化为一个球体(红色)和一个地基(黄色),其中地基与大地固连,初始位置球体在地基表面,重力加速度取竖直方向默认值。
图2 模型简化图2.设置初始速度如图3所示,由已知条件以初始速度为6M/S,向与水平面呈60°的投射角,可计算出球体(石块)初始速度的水平分量和垂直分量:Vx=3000mm/s,Vy=5196 mm/s。
图3 初始速度设置3.定义石块质量如图4所示。
图4 定义质量4.建立测量图5 建立测量5.进行仿真设置End Time:1.5;Step Size:0.01,得到运动轨迹如图6所示,由轨迹可知石块运动轨迹为一条抛物线,有石块轮廓密度可见石块运动速度由大变小再变大。
图6 运动轨迹5.数据数据与图表处理表1为石块运动过程中的在X及Y方向上的位移速度部分测量参数表,有表一可看出石块初始速度为Vx=3000mm/;Vy=5196mm/s;在t=0.54s时石块运动大约至竖直位移最高处,此时竖直位移约为1376mm,其在竖直方向上的速度分量约为100mm/s,接近零速度,若提高仿真精度可看到当石块运动至最高点时对应的竖直方向的速度分量几乎为零;图7为速度位移测量曲线,与表一一一对应;图8为按t=0.54s确定石块距离地面的最高距离H对应标记点及此时的数字标签;图9为按仿真动画单步逼近播放获得的石块返回地面瞬间的状态及其时对应的时间;图10 石块返回地面时对应标记点及此时的数字标签;图11 石块返回地面时竖直方向速度时对应标记点及其数字标签。
电铲工作装置EDEM Adams Simulink联合动态仿真

电铲工作装置EDEM Adams Simulink联合动态仿真电铲是一种用于挖掘和搬运土石等物料的工程机械设备,广泛应用于矿山、建筑工地和水利工程等领域。
电铲的工作装置是其核心部件,直接影响到电铲的挖掘效率和运行稳定性。
为了更好地理解电铲工作装置的动态特性,工程师们常常利用动态仿真技术进行研究和优化。
本文将介绍一种基于EDEM和Adams Simulink联合动态仿真的方法,以及其在电铲工作装置设计中的应用。
EDEM是一种专门用于颗粒动力学仿真的软件,可以模拟颗粒物料在不同工况下的运动和相互作用。
Adams Simulink是一种多体动力学仿真软件,可以模拟机械系统的运动和力学特性。
将EDEM和Adams Simulink两种软件进行联合仿真,可以更加真实地模拟电铲在挖掘和搬运过程中的工作情况,有助于工程师深入理解电铲工作装置的动态特性和工作原理。
我们需要建立电铲工作装置的三维模型。
对于电铲来说,其工作装置主要包括铲斗、铲杆和升降机构等部件。
利用EDEM软件可以对铲斗进行颗粒动力学仿真,模拟挖掘物料的过程,包括物料的流动、堆积和碰撞等。
利用Adams Simulink软件可以对铲杆和升降机构等部件进行多体动力学仿真,模拟电铲的各个部件在不同工况下的运动和力学特性。
我们可以利用联合动态仿真技术进行电铲工作装置的设计优化。
通过对电铲在不同工况下的动态特性进行仿真分析,可以找到电铲工作装置的优化方案,包括改进铲斗结构、优化铲杆长度和升降机构设计等措施,以提高电铲的挖掘效率和运行稳定性。
利用EDEM和Adams Simulink联合动态仿真技术可以更加真实地模拟电铲工作装置的动态特性,有助于工程师深入理解电铲的工作原理和优化设计方案。
相信随着这一技术的不断发展和应用,将为电铲工作装置的研究和设计提供更加有效的工具和方法。
基于ADAMS的液压挖掘机铲斗机构优化
基于ADAMS的液压挖掘机铲斗机构优化液压挖掘机铲斗机构是挖掘机的重要组成部分,其性能直接影响挖掘机的作业效率和稳定性。
为了优化液压挖掘机铲斗机构的性能,可以基于ADAMS进行建模和优化。
首先,可以使用ADAMS对液压挖掘机铲斗机构进行三维建模。
ADAMS 具有强大的建模能力,能够准确地描述物体的运动学和动力学特性。
通过建模,可以获得液压挖掘机铲斗机构的运动学和动力学参数,包括关节的位置、速度、加速度等。
这些参数对于优化设计是非常重要的。
其次,可以利用ADAMS进行动力学分析。
通过对液压挖掘机铲斗机构的动力学分析,可以确定其在工作过程中的受力情况和更好地理解其工作原理。
动力学分析可以揭示铲斗在不同工况下的受力特点,帮助我们理解其结构强度和稳定性,并为优化设计提供依据。
然后,可以使用ADAMS进行逆向优化。
通过将液压挖掘机铲斗机构的性能指标设为目标函数,将设计变量(如关节长度、连接方式等)设为待优化的参数,利用ADAMS的优化算法进行和调整,以找到使目标函数最小化的最佳设计方案。
通过逆向优化,可以根据实际需求来优化液压挖掘机铲斗机构的设计,提高其工作效率和稳定性。
最后,可以利用ADAMS进行静态和动态仿真。
通过仿真,可以验证优化后的液压挖掘机铲斗机构的性能是否满足设计要求,并对其工作过程进行评估和预测。
静态仿真可以检验铲斗机构的稳定性和载荷承受能力,而动态仿真可以模拟实际工作环境下的挖掘机作业过程,进一步验证其性能和可靠性。
综上所述,基于ADAMS的液压挖掘机铲斗机构优化可以通过建模、动力学分析、逆向优化和仿真等步骤进行。
通过这一过程,可以得到性能更优的液压挖掘机铲斗机构设计,提高挖掘机的作业效率和稳定性。
Adams单摆建模与仿真分析
ADAMS对单摆的建模与仿真分析姓名:班级:学号:单摆作业:已知: 摆杆质量M1=0.002kg,小球质量M2=12kg, 摆杆长度l=40.0cm, g=9.8m/s² ,初始摆角α=30º, 结束时间(End time):5.0 , 步长(Steps ):500一.建立单摆模型1.设置参数(1)通过开始程序菜单运行 ADAMS,运行 ADAMS。
(2)选择Create a new model 。
(3)确认Gravity (重力)文本框中是Earth Normal (-Global Y),Units(单位)文本框中是MMKS-mm,kg,N,s,deg,单击OK按钮。
(4)在Setting下拉菜单中选择Working Grid,系统打开参数设置对话框,在Spacing栏,X和Y项都输入10mm2. 建立摆杆模型(1)选择View菜单选择Coordinate Windows 命令,打开坐标窗口,以便查看模型尺寸。
(2)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :link工具(3)用鼠标左键单击Rigid Body :link工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part。
选中Length 选项,输入40cm,即单摆的长度。
选中Width选项,输入2.0cm。
选中 Depth选项,输入2.0cm。
(4)单击View中的Coordinate Window键,鼠标单击(0,400,0)作为单摆的左侧起点,然后单击右侧水平方向的任一点,ADAMS自动生成摆臂3.设置摆臂位置(1)在工具箱中选择定位图标。
(2)打开参数设置对话框,在Angle栏输入30,此时摆臂高亮显示。
(3)点击2次顺时针箭头,摆臂转向与竖直方向成30度方向。
4.建立球模型(1)在主工具箱右键单击Rigid Body 在弹出的级联图标中选择Rigid Body :sphere工具(2)用鼠标左键单击Rigid Body:sphere 工具,系统打开参数设置对话框,确认在工具箱下方文本框中显示New Part(3 )单击View中的Coordinate Window键,鼠标单击摆杆右端点作为球的中心点,自动生成一个球5.设置摆臂和球的质量(1)鼠标右键单击摆臂Part 2,在打开的右键快捷菜单中选择Modify,弹出修改对话框(2)在Define Mass By栏选择User Input。
机械原理课程设计adams仿真
机械原理及设计(一)a课程设计说明书设计题目:曲柄滑块专业班级: xxx设计者: xxx_____指导教师: xxx温州大学机电工程学院2008 年 6月 25 日内容第一章设计需求1.1设计内容:曲柄滑块机构,曲柄长70mm,连杆长100mm70m m100m m1.2原始数据曲柄的转动速度ω为10rad/s1.3数据要求计算滑块的位移s,速度v,加速度a第二章机构运动分析采用图解法或解析法进行机构的运动分析第三章虚拟样机实体建模与仿真3.1 样机模型建立3.1.1创建样机几何模型1、启动ADAMS双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“Create a new model”,在模型名称(Model name)栏中输入:qubinghuakuai;在重力名称(Gravity)栏中选择“Earth Normal (-GlobalY)”;在单位名称(Units)栏中选择“MMKS –mm,kg,N,s,deg”。
如图1-1 所示。
图1-1欢迎对话框2、设置工作环境(1) 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(setting)下拉菜单中的Unit命令如图设置,点OK再选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y分别设置成300mm 和300mm,间距(Spacing)中的X和Y都设置成10mm。
然后点击“OK”确定。
(2) 用鼠标左键点击选择(Select)图标,控制面板出现在工具箱中。
(3) 用鼠标左键点击动态放大(Dynamic Zoom)图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
3 创建实体(1)在ADAMS/View中零件库中选择连杆图标,点并输入下列坐标值(0.0,0.0,0.0)(70,0.0,0.0)(170,0.0,0.0),如图3-1所示图3-1(2) 在ADAMS/View中零件库中选择连杆图标,参数选择New Part,点选POINT1,POINT2,建立LINK4,再点选POIN2,POINT3建立LINK5,再选择图标,设置depth数值为20,其它设置不选,建立滑块,如图3-2所示;图3-2-1右键,弹出如图3-2-2所示,选marker.marker5的modify,弹出marker modify窗口,设置location的值(150,10,-10)使滑块对称,如图3-2-3所示图3-2-2图3-2-33.1.2添加样机约束副(1)选择,并点选POINT1,建立Revolute接点JOINT1,在画面中显示;再选择Revolute 接點工具, 並修改Construction Mode 为 2 Bod-1 Loc, 並點取PART_3, PART_2和POINT_2,建立JOINT2;再建立点取PART_3, PART_4和POINT3,建立JOINT3(2)选择,修改Construction Mode 为 2 Bod-1 Loc,並點取PART_4, ground和POINT_3,建立JOINT4如图3-3所示3.1.3创建样机运动和动力选择,设定speed为10,点选JOINT_1,建立MOTION_1如图3-4所示图3-43.1.4样机仿真(1)检验检验工具1接点关系检验工具2输出自由度、限制条件等当出现Model verified successfully时,说明模拟成功(2)選擇Simulation 模擬工具, 設定End Time 為 5 秒, 500 Steps輸出, 再點取開始模擬, 結束後可點取Reset 鍵, 回復3.2 模型仿真分析3.2.1测量样机的运动学和动力学参数(1)将鼠标移到滑块上,右击,在弹出菜单中选Marker.cm,再在下级菜单中选Measure,弹出了Point measure对话框,如图5-1-1,5-1-2图5-1-1图5-1-2(2在图5-1-2中的Characteristic栏中选择Translational displacement,在Component栏中选择x,在Measure name 中重命名为.qubinghuakuai.cm_s如图10-5 所示。
基于ADAMS的机械四连杆机构运动仿真分析
基于ADAMS的机械四连杆机构运动仿真分析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的机械系统模型动力学仿真软件,通过ADAMS可以对机械系统的运动进行仿真分析。
机械四连杆机构是一种常用的运动转换机构,在机械工程领域中应用广泛。
本文将基于ADAMS对机械四连杆机构进行运动仿真分析,以探究其运动特性。
需要建立机械四连杆机构的模型。
在ADAMS软件中,可以通过建模工具箱进行模型建立。
选择合适的零件进行建模,并定义零件之间的连接关系和运动约束。
根据机械四连杆机构的特点,需要定义四个铰链关节来连接相邻的零件,同时需要设置运动约束以模拟四连杆的运动。
接下来,需要给机械四连杆机构添加驱动器。
驱动器可以模拟对机构施加的力或运动,用以驱动整个系统的运动。
在ADAMS中,可以选择合适的驱动器类型,并设置合适的输入参数。
在机械四连杆机构中,可以选择驱动轮或驱动杆等进行驱动。
然后,进行仿真参数设置。
在ADAMS中,可以设置仿真的时间范围、步长和求解器等参数。
根据需要,可以设置合适的仿真参数,以保证仿真的精度和效率。
完成仿真参数设置后,就可以进行运动仿真分析了。
点击仿真按钮,ADAMS将自动进行仿真计算,并以图形和数值的形式显示仿真结果。
可以通过仿真结果来分析机械四连杆机构的运动特性,包括角位移、角速度和角加速度等。
在分析机械四连杆机构的运动特性时,可以通过改变机构参数或驱动器参数来进行参数分析。
通过调整参数,可以得到不同情况下的运动特性,并进行比较分析,以评估机构的性能和优化设计。
通过ADAMS进行机械四连杆机构的运动仿真分析可以帮助工程师深入了解机构的运动特性,优化设计,提高机构的性能和效率。
ADAMS提供了丰富的建模工具箱和仿真参数设置,使得仿真分析更加方便和准确。
通过仿真分析,可以为机械四连杆机构的设计和优化提供有效的参考和指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 1- 2 完成车架模型
1.3 建立动臂模型
使用工具 Extrusion 建立动臂模型,选择由点创建,各点坐标如图 1-3 所示, length=500mm,并倒角,在动臂左端建立 marker48,右侧建立 marker18,移动使 marker18 与车架上的 marker14 重合;
图 1- 3 动臂拉伸建模坐标点 2
斗杆 铲斗液压缸 铲斗液压杆 摆杆上连杆(左) 摆杆上连杆(右) 摆杆上连杆(左) 摆杆上连杆(右) 摆杆下连杆(左) 摆杆下连杆(右) 摆杆下连杆(左) 摆杆下连杆(右)
铲斗 液压杆(四处)
Revolute Spherical Cylinder Cylinder Cylinder Spherical
斗杆完成如图 1-7 所示。
图 1- 6 斗杆拉伸坐标点
4
1.6 建立铲斗模型
图 1- 7 完成斗杆模型
使用工具 Extrusion 建立铲斗外形模型,选择由点创建,各点坐标如图 1-8 所示,
length=900mm
使用工具 Extrusion 建立铲斗内腔模型,选择由点创建,各点坐标如图 1-9 所示,
6-8 s 底盘转 过 90 度
8-10 s 收铲斗
10-12 s 底盘反 向转过 90 度 收斗杆 伸铲斗
12-14 s 收动臂 伸斗杆 伸铲斗
动臂液压缸动作函数:STEP ( time , 0 , 0 , 2 , -200 )+
STEP ( time , 2 , 0 , 4 , 200 )+
STEP ( time , 4 , 0 , 6 , -500 )+
铲斗液压缸动作函数:STEP ( time , 0 , 0 , 2 , -300)+ STEP ( time , 2 , 0 , 4 , 400 )+ STEP ( time , 4 , 0 , 8 , 0 )+ STEP ( time , 8 , 0 , 10 , -400 )+ STEP (time, 10, 0, 14, 300)
选择动臂与车间连接处 marker199 测量动臂铰链受力,measure name 设为 model_1.marker_199_dongbi,characteristic 选择 force on point,component 选择 mag,单 击 ok 完成测量。
选择斗杆与动臂连接处 marker53 测量斗杆铰链受力,measure name 设为 model_1.marker_53_斗杆,characteristic 选择 force on point,component 选择 mag,单击 ok 完成测量。
图 1- 1 挖掘机底盘
1.2 建立车架模型
使用工具 box 建立模型,length=2400,height=300,depth=2200,设置为 new part; 使用工具 box 建立动臂支架座,length=200,height=900,depth=500,设置为 add to part; 使用工具 box 建立两个动臂液压缸支架座,length=200,height=300,depth=200,设 置为 add to part; 使用位置调整工具调整支架座的位置,使动臂支架与液压缸支架座 x 向间距 500mm, 两液压缸支架座 z 向间距 700mm,;动臂支架位于两液压缸支架 z 向中间位置; 使用工具 fillet 对支架上侧倒圆角,radius=100; 使用工具 marker,在各支架座圆弧圆心沿 z 轴中间位置建立 marker 点,液压缸支架 上为 marker16、marker16,动臂支架为 marker14; 修改模型名称为 chejia;模型完成如图 1-2 所示:
驱动表达式 0 0 0 0
校验模型,如下图:
9
图 2- 1 模型校验结果
3 模拟仿真
3.1 挖掘机运动过程仿真
通过设定驱动表达式,来模拟挖掘机工作过程,挖掘机一个工作循环动作内容流程如
下:
时间 动作 内容
0-2 s 伸动臂 收斗杆 收铲斗
2-4 s 收动臂 伸斗杆 伸铲斗
4-6 s 伸动臂 伸斗杆
构件二 车架 动臂
动臂液压缸(左) 动臂液压缸(右) 动臂液压杆(左) 动臂液压杆(右)
斗杆液压缸 斗杆液压杆
约束类型 Revolute Spherical Spherical Spherical Revolute Cylinder Spherical Cylinder
8
动臂 斗杆 摆杆 斗杆 斗杆 摆杆 摆杆 铲斗 铲斗 摆杆 摆杆 斗杆 液压缸(四处)
使用工具 box 在动臂上方建立斗杆液压缸支架座,length=200,height=400,depth=200, 设置为 add to part;
使用工具 cylinder 在动臂两侧建立动臂液压杆支座,length=200,radius=50,使用位置 工具调整到合适的位置;
动臂完成后如图 1-4 所示:
选择铲斗与斗杆连接处 marker147 测量铲斗铰链受力,measure name 设为
11
model_1.marker_147_chandou,characteristic 选择 force on point,component 选择 mag,单 击 ok 完成测量。
在铲斗尖端添加 marker215,用于测量铲斗加速度,右击选择 measure,measure name 设为 model_1.marker_215_chandouacc,characteristic 选择 translational acceleration, component 选择 mag,单击 ok 完成测量。
挖掘机建模过程及运动仿真
完成如下挖掘机简化模型,并进行运动过程仿真及受力分析:
斗杆液压缸
动臂
斗杆
动臂液压缸
上连杆
铲斗
铲斗液压缸 摆杆
下连杆 挖掘机总体结构图
车身 底盘
1 建立挖掘机模型
1.1 建立挖掘机底盘模型
运行 adams,建立新模型,设置工作网格大小为 5000x2000,间隔为 100mm。 使用工具 box 建立模型,length=4200,height=900,depth=2800,设置为 on ground; 再在 box1 左右两端建立 box2 和 box3,length=1200,height=900,depth=1600,设置 为 on ground;使用位置调整工具,调整 box2 和 box3 的位置在 box1 沿 z 轴方向的中间, 使用布尔运算工具从 box1 中减去 box2 和 box3; 使用工具 Cylinder 建立旋转支撑部分,length=200,radius=700,设置为 add to part, 调整位置,使其位于 box1 中间。 使用 fillet 工具将 box1 左右倒圆角,radius=450; 底盘模型建立完成,如图 1-1 所示
设定工作过程中铲斗每次铲起 3000N 的土石,根据工作过程在 4-6s 力由零增大到最 大值,在 6-8s 保持,在 8-10s 减小到零,选择在铲斗质心添加力,run-time direction 选择 space fixed,力大小通过 step 函数设定,函数为
STEP( time , 4 , 0 , 6 , 3000 )+ STEP( time , 8 , 0 , 10 , -3000 )
进入后处理,data simulation 选择 last_run,source 选择 measure,在 measure 窗口 中一次选择各测量数据,点击 add curves,在窗口中依次得到动臂铰链受力图、斗杆铰链 受力图、铲斗铰链受力图以及铲斗加速度图。并通过 Plot tracking 按钮,得到各测量内容 的最大值。由图 3-2 得动臂铰链处最大力 173770N,由图 3-3 得斗杆铰链处最大力 39862N, 由图 3-4 得铲斗铰链处最大力 23248N,由图 3-5 得铲斗最大加速度 12687mm/s2。
There are no redundant constraint equations. Model verified successfully
2 添加约束
根据挖掘机各零部件的运动关系和装配关系,建立相应的 marker 点,在各 marker 点
上对挖掘机各部件之间建立约束如表所示:
构件一 底盘 车架 车架 车架 动臂 动臂 动臂 斗杆
1.9 建立铲斗液压缸模型
方法同 1.4,完成如图 1-13 所示,
7
图 1- 13 完成铲斗液压缸模型
1.10 模型检查,结果如下
VERIFY MODEL: .model_1 102 Gruebler Count (approximate degrees of freedom) 17 Moving Parts (not including ground) 102 Degrees of Freedom for .model_1
图 1- 4 完成动臂模型
1.4 建立动臂液压缸
使用工具 cylinder 建立液压缸,length=1200,radius=70,液压杆 length=1200,radius=50; 调整位置如图 1-5 所示
图 1- 5 完成动臂液压缸模型 3
1.5 建立斗杆模型
使用工具 Extrusion 建立动臂模型,选择由点创建,各点坐标如图 1-6 所示, length=500mm,并倒角,在动臂右端建立 marker50,移动使 marker50 与动臂上的 marker48 重合;
length=700mm,使用布尔运算工具想减完成铲斗模型,并倒角。
使用工具 box 建立铲斗连杆支座,length=200,height=80,depth=100,调整到合适的