车辆碰撞模拟仿真分析假人模型
汽车-行人撞击事故过程仿真研究
( 尔滨 工业大学汽车工程 学院, 哈 威海 240 ) 629
[ 摘要 ] 根据 中国人体特征参数建立 了 1 6刚体 的行 人模 型 , 人体 的主要 部位 生成简 易的弹簧 阻尼运 动关 在
节。建立汽车模 型与汽 车一 行人 碰撞模 型 , 用 A A S软件模 拟汽车一 应 DM 行人 碰撞过 程。通过模拟 不 同速度下 的汽
1 前言
随着计 算 机技 术 的 发展 , 算 机 模 拟 在工 程 辅 计 助分 析 中 占有 越来 越 突 出的地位 。以适 当的理论 建
大量的:作 , [ 制定了国家标准。 文 中使 用 机械 系 统 动 力 学分 析 软 件 A A D MS对 行人与汽车碰撞过程进行仿真分析 。采用符合 中国 人体特征的参数 , 建立 1 6刚体 的行人模型 , 在人体 的主要部位生成简易 的弹簧 阻尼运 动关节 , 模拟仿 真碰 撞过 程 。
何、 质量 、 心 、 性矩 等 , 质 惯 还依 赖于 人体 关 节处 的生
在碰撞仿真过程 中, 采用符合 中国人体特征 的 参数 , 仿真结果更能逼近真实值。根据 文献 [ ] 选 2, 定人体模型为: 身高 11 1m, 7 . c 体重 5 .5k 。模型 888 g 的基本参 数 如表 1 示 。 所
立人体和车辆的计算模型 , 以在计算机 中虚拟地 可 呈 现行 人与 车辆 碰 撞 的各 种 工 况 , 而 全 方 位 地 把 从
握 行人 在碰撞 后 的运 动情 况 以及 受 伤 害情 况 。通 过
2 行人 多刚体模型
工艺实验 假人 借鉴 了美 国 H b d1 yr 的设计 经 i1 1 验 J其 尺 寸 和质量 为 中国成 年男 性 的 9 , 0百分 位 平
汽车碰撞计算机仿真方法及其常见问题分析精品
5. Barrier model
6. Welding 7. Material failure modes development 8. Joint development 9. Foam material 10. Dummy model
Peng Bingyuan, ETA-China, 2006.4.11
汽车碰撞仿真的最新进展和发展趋势
ENGINEERING TECHNOLOGY ASSOCIATES
汽车碰撞仿真的最新进展和发展趋势:
RADIOSS Performance LS-DYNA Typical model - about 200K elements
60000
50000
Wallclock Time (sec)
Peng Bingyuan, ETA-China, 2006.4.11
Engineering Technology Associates, Inc. (ETA)
公司成立于1983年 公司位于:
总部:Troy, Michigan USA; 上海:ETA-China in Shanghai; 南京: ETA-China in Nanjing;
汽车碰撞仿真的最新进展和发展趋势
ENGINEERING TECHNOLOGY ASSOCIATES
汽车碰撞仿真的最新进展和发展趋势:
NIC Usage By Disclipline, 1996
9% 16% 11%
CFD Crash Cross Attribute Durability NVH Other
Cost Cut
Insight View of Failure Modes
Peng Bingyuan, ETA-China, 2006.4.11
某轻型客车正面碰撞仿真分析
F a n g C h a o 2 , Y a n g Q i l i a n b  ̄ , X u Ma o l i n 3o o l o f A u t o m o b i l e a n d T r a f i f c E n g i n e e i r n g , Wu h a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Wu h a n 4 3 0 0 8 1 ,
J u n .2 0 1 3
d o i : 1 0 . 3 9 6 9 6 . i s s n . 1 0 0 8 - 5 4 8 3 . 2 0 1 3 . 0 2 . 0 1 3
某轻型客 车正面碰 撞仿 真分析
方超 - - , 杨 启 梁 , 徐 茂林。 , 杨 胜。
( 1 . 武 汉 科 技 大 学 汽 车 与交 通 工 程 学 院 ,湖北 武 汉 4 3 0 0 8 1 ;2 . 湖 北 汽 车 工 业 学 院 汽 车工 程 学 院 ,湖北 十 堰 4 4 2 0 0 2 3 . 东 风 汽 车 商用 车 技 术 中 心 。湖北 武 汉 4 3 0 0 5 6 )
3 . T e c h n i c a l C e n t e r , Do n g f e n g C o mme r c i a l Ve h i c l e , Wu h a n 4 3 0 0 5 6, Ch i n a )
Ab s t r a c t :T h e i f n i t e e l e me n t me t h o d wa s u s e d t o r e s e a r c h t h e s e c u r i t y f o r a l i g h t p a s s e n g e r c a l " ’ s
正面碰撞试验中50% 男性假人与5% 女性假人伤害对比研究
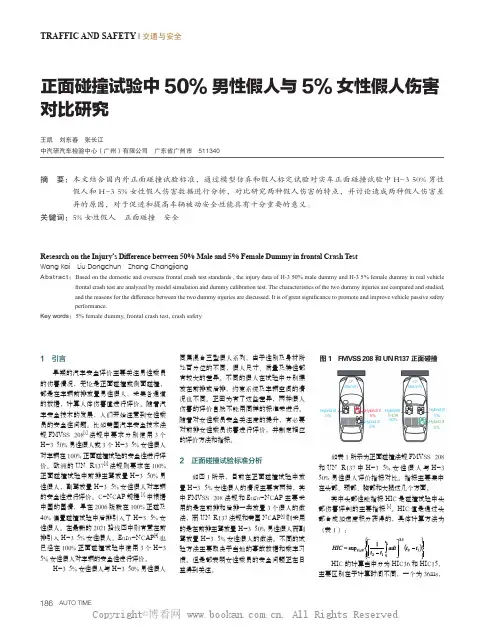
图 1 FMVSS 208 和 UN R137 正面碰撞
0° 50km/h
0° 56km/h
Hybrid III 5%
Hybrid III 5%
Hybrid III 5%
Hybrid III THOR 50%
Hybrid III 5%
Hybrid III 5%
如表 1 所示为正% 女 性 假 人 与 H-3 50% 男性假人评价指标对比。指标主要集中 在头部、颈部、胸部和大腿这几个方面。
TRAFFIC AND SAFETY | 交通与安全
正面碰撞试验中 50% 男性假人与 5% 女性假人伤害 对比研究
王凯 刘东春 张长江 中汽研汽车检验中心(广州)有限公司 广东省广州市 511340
汽车-行人碰撞多体动力学仿真与抛距模型研究
・ + ×t/ =∑ g ・
\ I — — x I l x v
=
得 以通过统 一 的数 学 模 型来 解 决 。P — R S 是 奥 CC A H
l —
\一 — - I I z
— l
l
() 4
地利 D D研究 所 开发 的汽 车碰 撞仿 真 软件 , 国外 尤 S 在 其是 欧洲 和美 国 , 软件 的应 用 已经 非 常广泛 。文 该
作者简介 : 谢州凯 (9 7 , , 江宁海人 , 18 ) 男 浙 工学硕士 , 主要从事汽车碰撞 与安全性研究 。Em i x ki2 @13 cm - al i a 7 6 .o :e 5
[ 研究 . 设计]
谢帅I , 凯 等
汽车 一 人碰 撞多体 动力学 仿真与抛 距模 型研 究 行
擦 系数等 ) 来定义行人特征。并将模 型与国外某实车碰撞试 验对比验证其 可靠性。通过对仿真结果 的回归分析得 出 了
车速一 抛距模型 , 为该 类交通事故处理提供 了数据参考。图 5表 2参 1 3
关 键 词: 多体动 力学; 汽车- 行人碰撞 ; 仿真 ; 车速
文 献 标 志 码 : A 文 章 编 号 :0 52 9 (0 2 0 - 4 - 10 —85 2 1 )40 00 0 4 中图 分 类 号 : 42 8 U 9 .
用式 ( ) ( ) 4 和 5 表示
F P。hg S p i =A F~。 =e S A () 4 () 5
质 量及各生物力 学参数都 是小 数量级 的 , 变化对 仿真 其
结 果 的影 响较 大 , 以人体 的建 模需尽可 能保证 精确 。 所 1 1 多刚体 行人 模型 的建 立 .
汽车——行人道路交通事故运动仿真研究
。
所取
在 关 节计 算 时忽 略 关 节处 的 力矩
的 时 间 步 长 应 该相 对 小
一
60
I嬲
维普资讯
四
,
模拟 仿真
按 照 上 面 的分 析
.
接触
运 用p c
—
.
然后 是 大腿 与发动 机 盖 边 缘 接
.
c ra s
h
触
。
下 肢 向前作加 速 运 动
速度
、
加
速度 等
。
本 文 采 用 多 刚体 假 人 模
,
价值和 社 会 意 义
。
型
,
该 方 法 不 仅 能 完 全模拟 上 述 参 数
同 时还 能
建立
道 路 交 通 事 故 中人 体 生 物 样 本 的 假 人
完 整 再 现 交 通 事 故 中行 人
的运 动状 态
。
一
、
假 人 模 型 的建 立
在行人 与车辆碰 撞 的交通 事故
作用
另 外 有 以 下 两 点假 设
:
辆而 言都是 小 数量 级 的 变化
,
参 数 的微 小
位置
X
e
。
分 别 用 用 椭 圆 球 的a 轴 方 向 作 为
,
对人 体运 动仿 真结果 将产 生很
。
轴
b 轴 方 向作 为Y e 轴
。
,
c
轴 方 向作
大影响
因此
.
确定人 体生 物 力学 特
.
为Z e
轴
征参数需仔 细 选 取
节上 的反 作 用 力取 代 个体 可 以 单 独 分 析
汽车侧面碰撞的CAE仿真分析
FORUM | 论坛时代汽车 汽车侧面碰撞的CAE仿真分析杨延鹏 李洪力 陈静波 李国亮海马汽车有限公司 河南省郑州市 450016摘 要: 汽车被动安全开发,需要进行大量的整车碰撞和SRS验证,周期较长,过程复杂。
随着GB、C-NCAP等评价要求的提高,往往需要投入高昂的开发费用,而进行汽车碰撞安全的CAE仿真计算,并进行结构优化模拟,逐步成为研究汽车耐撞性的必然选择。
本文对汽车侧碰进行建模,根据仿真结果对基础车型进行评价,并通过结构优化提升车体结构耐撞性,为后续开发提供参考。
关键词:汽车;侧面碰撞;CAE仿真分析汽车结构耐撞性主要考虑整车碰撞过程中,基于GB法规、C-NCAP评价规则要求的正面碰撞、侧面碰撞等乘员生存空间保护,体现在两方面因素:生存空间碰撞侵入量、加速度或侵入速度[1]。
因此汽车设计中,必须保证车身结构吸能变形性能的稳定,进行实车碰撞试验来检验汽车被动安全性能,投入费用较高,整车需求量也较大。
CAE仿真分析有着方便性、成本低、可重复、周期快等特点,可以就汽车设计进行快速验证和结构优化建议,从而有效的提升设计效率,保障汽车结构的安全性。
1 侧面碰撞仿真模型建立根据企业建模标准并结合GB 20071-2006 《侧面碰撞的成员保护》的要求,建立汽车侧碰模型,如图1所示:1.1 模型建模根据实车数模分别对白车身、底盘、动力、CCB、转向、排气、冷却、开闭件、座椅等系统进行网格划分、材料属性定义、连接设置、建立各总成的碰撞模型。
在LS-DYNA软件中,考虑多应变率的影响,材料类型主要采用MAT24,根据BOM选择不同牌号并赋予属性。
实际碰撞中发动机、变速箱、轮毂等刚度较大,较其他部件变形较小,采用MAT20材料定义为刚体,缩减计算量。
根据连接类型,点焊采用MAT100 HEXA,二保焊采用RB2连接,玻璃胶、结构胶、减震胶分别进行设置,并建立运动件的各类铰接关系[2]。
1.2 整车搭建各分总成模型建立后,根据号段规则对节点、部件等分别编号,最后采用PATCH方式,建立总成间的连接。
某车型侧面碰撞假人胸部伤害优化分析
第 1 2根腰 椎 T 。 弯矩 达到 23N ・T 力 达 4 I、 /
到 了 2 0 N, 重 超 标 , 图 1 2所 示 . — . 1k 严 如 、 C
1 分 析 方 法
侧 面 碰 撞 PM ( rsr e t c r Moo ) S Peci dSr t e tn b u u i
子结 构建模 方 法是 将 整 车 C E结 构模 型 的计 算 A
NA C P中规 定 的 T 弯 矩及 力 的低 限值 为 20 0 N・ m和 2k 导致 胸部 罚 分 2分 , 车 型侧 面 碰 N, 该 撞 试验 中假人 胸部 仅得 到 0 9 .6分.
由于该 车 型 5 m h侧 面 车 身 结构 摸 底 碰 0k / 撞 试验 中未配 置 侧 面气 囊 和 侧 气 帘 , 部 推 动 块 髋
的要求 . C—N A C P侧 面碰撞 评 估标 准 中不 仅包 括
了 国家 强制性 标 准 中所 需 要 评 定 的假 人 伤 害值 , 还包括 了 3个 侧 碰假 人 胸 部 伤 害修 正 项 l . 面 1侧 J 碰 撞假 人得 分 的提 高 , 了对 车 体 侧 面结 构 和 车 除
33 3
图 34所示 . 、 由图 可 知 : 面 P M 子 结 构仿 真模 侧 A
型与侧 碰 实车试 验具 有较好 的一 致性 .
图 3 侧面不带气囊仿真动 画与试验 录像 比较
图 1 侧 面碰 撞 P M 子 结 构 仿 真 模 型 S
Fi.1 PS mo lo e ce sde i g M de fv hil i mpa t c
2 存 在 问题 分 析
某车 型在 5 m h侧 面车 身结构 摸底碰 撞试 0k / 验 中假人 头部 、 部 和骨盆 均得 到满分 , 腹 失分 项集
车辆碰撞事故仿真模型精确性与应用价值评估
车辆碰撞事故仿真模型精确性与应用价值评估车辆碰撞事故是造成许多人伤亡和财产损失的主要原因之一。
为了有效预防和减少车辆碰撞事故的发生,研究人员开发了各种仿真模型来模拟碰撞过程,并评估其精确性和应用价值。
本文将重点讨论车辆碰撞事故仿真模型的精确性以及对交通事故预防和安全措施制定的应用价值。
首先,车辆碰撞事故仿真模型的精确性是评估其有效性的重要指标。
模型的精确性取决于多个因素,包括模型使用的数据源、碰撞物理特性的描述和模型验证的方法。
需要使用真实的数据来创建和验证模型,以确保模型能够准确地模拟车辆碰撞事故发生时的情况。
此外,模型还应能够准确地描述车辆和碰撞物的物理特性,如质量、速度、形状等。
模型验证的方法应引用实际发生的车辆碰撞事故数据进行对比,以验证模型的准确性。
其次,车辆碰撞事故仿真模型的应用价值主要表现在以下几个方面。
首先,模型可以被用于事故预防和安全措施的制定。
通过模拟不同的交通情境和安全措施,可以评估不同方案对车辆碰撞事故的减少效果。
这可以帮助交通管理部门和政府制定更科学和有效的交通管理政策和安全措施,以提高交通安全性。
其次,模型可以用于事故调查和事故原因分析。
通过模拟特定的碰撞事故,可以确定事故发生的原因和过程,并提供有关事故重现和责任认定的依据。
此外,模型还可以用于评估车辆结构和安全设备的设计。
模型可以模拟不同车辆的碰撞情况,评估车辆结构和安全设备对事故时乘员的保护效果,以指导车辆制造商进行结构和安全设计的改进。
然而,尽管车辆碰撞事故仿真模型具有很大的潜力,但仍存在一些挑战和限制。
首先,模型的建立和验证需要大量的数据和专业知识。
需要准确的车辆和碰撞物性能数据、事故数据以及物理学和工程学的知识。
这需要大量的时间和资源,限制了模型的应用范围和推广。
其次,模型的准确性受到许多不确定因素的影响,如碰撞涉及的复杂物理过程、车辆和碰撞物的不确定因素等。
这些因素的影响可能导致模型的误差和不确定性,降低了模型的精确性和可靠性。
仿真技术在汽车碰撞分析中的应用
Total No. 3012021,Number 1总第301期2021年第1期HEBEI METALLURGY仿真技术在汽车碰撞分析中的应用张青,崔彦发,赵轶哲(河钢集团钢研总院,河北 石家庄050023)摘要:汽车的安全技术包括主动安全和被动安全两个方面。
在汽车被动安全性的研究中,汽车碰撞安全 性研究是汽车被动安全技术的重要内容。
随着汽车行业和计算机仿真技术的不断发展和进步,碰撞仿真技术被广泛应用在汽车车身结构的耐撞性能、乘员保护系统、人体在受到撞击时的损伤机理及响应研 究中。
论述了汽车碰撞仿真技术的基础理论和常用软件,并采用显式非线性软件LS - DYNA 对某车型的前防撞梁系统100%正面碰撞过程进行仿真模拟,分析了前防撞梁的碰撞变形过程。
研究结果表明: 相比于台车碰撞试验,碰撞仿真技术试验周期短、成本低,可以模拟任意试验条件和工况参数,轻松获取 各个位置变形数据。
但是,现阶段的碰撞仿真技术还不能够完全实现整车碰撞过程中所有的结构变动模拟,碰撞仿真和实车碰撞相结合仍是汽车碰撞安全性研究的重要手段。
关键词:汽车安全性;汽车碰撞;仿真;有限元;前防撞梁中图分类号:U467. 14文献标识码:A 文章编号:1006 -5008(2021)01 -0028 -06doi :10. 13630/j. chki. 13 - 112. 2021.2105APPLICATION OFSIMULATIONTECHNOLOGY IN VEHIELE COLLISION ANALYSISZhang Qing , Cui Yanfo , Zhao Yizhe(HBIS Group Research Institute , Shijiazhuang , Hebei, 050023)Abstract :AuimoPile sefetu technology includes activa sefetu and passiva sefetu. And ie vabicle cdlisionsefetu research is an important centext of vabicle passiva sefetu technology. With the centinuous progress ofantomobile industro and computes simulation technology , cellision simulation technology is wiUely used in the research of CrasPwortPiness of antomopile body strocturc , occhpant protection system , human body dam ape mechanism and reshonse in impact. This papes dischsses the basic thevk and cemmon spftwarc of "山-cle cellision simulation technology , and adopts explicit nonlineas seftwak LS - DYNA to simulate the 100% frontai cellision process of a vaViclet front bumpeo system , and analyzes the cellision deformation process ofthe fropt bumpek. The reselts show that the crash simulation technology has the advantapes of short test ch- cle , low dst , which cen simulate any test conditions and operating parameters and easily oPtain the deforma tion data of any position , compareb with the sled crash test. Howevas, the chrrext collision simulation tech nology cennot fully realize the stroctural changes simulation during the process of vabicle collision. Thereforethe combination of collision simulation and real vehicle collision is still an important means of vehicle co II-- sion sefetu research.Key Words : animopile sefetu ; antomopile collision ; simulation ; finite element ; front bumpek0 引言伴随着我国汽车保有量的逐年增加,交通事故收稿日期:2020 -08 -20基金项目:河北省自然科学基金(编号:E2018318013)作者简介:张青(190 -),男,工程师,硕士 ,2016年毕业于燕山大学材料加工工程专业,现在河钢集团钢研总院主要从事用户服务工作,E - mail : zhany_qing2018 @ 13. com的发生率不断攀升。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于车辆碰撞仿真分析用人体模型的认识——学习笔记及认识总结李良 车辆工程 30608020406人体模型:以人体参数为基础建立,描述人体形态特征和力学特征的有效工具,是研究、分析、设计、评价、试验人机系统不可缺少的重要辅助手段。
根据人体模型的用途进行分类:1、设计用人体模型——汽车用H 点人体模型2、作业分析用人体模3、工作姿势分析用人体模型4、动作分析用人体模型5、人机界面匹配评价用人体模型6、动力学分析用人体模型7、运动学分析用人体模型 8、试验用人体模型——汽车碰撞试验用人体模型一、概况介绍车辆碰撞仿真分析用人体模型车辆碰撞过程中,车内成员运动的动力学过程具有大位移、非线性、多自由度、瞬时性等特点,建立适合于这些特点的、基于多体系统动力学的人机模型,是进行车辆碰撞过程车内成员运动响应分析的关键技术问题。
基于多体系统动力学的二维和三维人体模型,应用于汽车碰撞过程中乘员运动响应的仿真分析、汽车碰撞行人事故中人体运动的仿真分析等问题的研究。
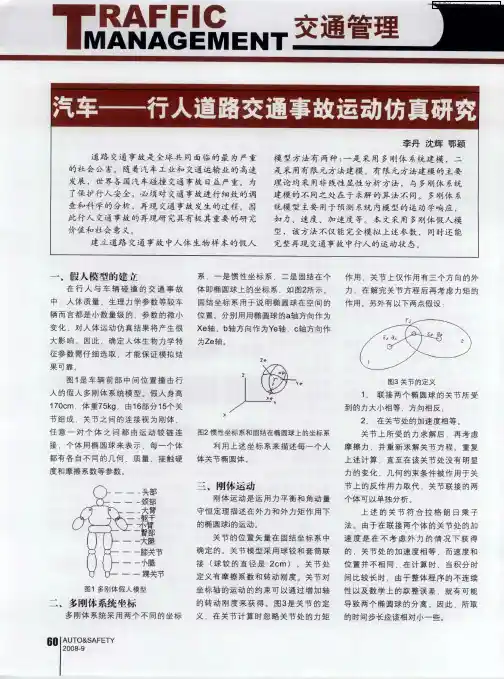
人体模型的结构:(以 MUL3D 汽车碰撞人体运动响应 为例)1、人体模型的组成:13个刚体——头部、颈部、胸部、腰腹部、臀部、左右上臂、左右前臂和手、左右大腿、左右小腿和足。
2、相邻刚体之间的铰接约束形式根据人体关节的解剖学结构特点选取。
胸部与左右上臂之间的肩关节 ——万向节人机系统匹配评价用人体模型车辆碰撞仿真分析用人体模型左、右上臂与左、右前臂之间的肘关节——转动副左、右大腿与左、右小腿之间的膝关节——转动副其它各关节——球面副3、为了描述和计算人体与车身有关结构之间的碰撞力,根据碰撞接触的可能形式,将人体模型各组成部分的形状用椭球加以描述,将车身有关结构部分的形状用平面加以描述,按椭球与平面的贯穿接触来计算贯穿接触力。
二、虚拟现实中多刚体人体模型的构建1、人体Hanavan 模型概述在虚拟环境中模拟人体运动,首先就是要建立逼真的人体模型。
从运动生物力学角度看,还要建立运动技术的力学模型,必须知道内在规律和约束条件两类因素。
人体的外形主要是由人体的骨骼结构和附着在骨骼上的肌肉运动决定的。
在人体运动过程中,皮肤的形变随着骨骼的弯曲和肌肉的伸展与收缩而变化。
人体外形模型构建通常采用棒模型、表面模型和体模型三种方法。
棒模型是将人体轮廓用棒图形和关节来表示。
表面模型是由一系列多边形和曲面片的表面将人体骨骼包围起来表示人体外型,该模型可以通过修改表面点来表示人体的运动,也可以消除其隐藏面,真实感较强,但有限的多边形面表示人体表面光滑性不够。
体模型是由基本体素的组合来表示人体外型,如采用圆柱体、椭球体、球体等体素来构造人体。
人体在忽略受力产生形变的情况下,可看作一个由关节点连接的多个刚体所构成的系统。
人体运动仿真系统的人体模型通常采用的是汉纳范(Hanavan)模型。
它将人体分解为1 5 段,由头、上躯干、下躯干、左上臂、左下臂、左手、右上臂、右下臂、右手、左大腿、左小腿、左脚、右大腿、右小腿、右脚组成,每一段皆为匀质的不可变形的刚体,各段之间以绞链相连接[5]。
对于一般的刚体,任意时刻只要知道它的空间位置、姿态,就能在空间中描述这个刚体。
而人体不同于一般的刚体,人体是由200 多个旋转关节组成的复杂形体,仅仅依靠三个位置量、三个姿态角不能模拟真实的人体运动,需要提供所有的关节数据。
所以人体运动的仿真要远复杂于一般的刚体,也就更具挑战性。
2、三维人体模型设计由于人体结构的复杂性,有必要对人体进行抽象和简化,为了更好的描述运动,把人构造成层次结构。
人体骨架模型主要由关节和骨骼构成。
有些关节结构比较复杂,比如肩关节,它实际上由很多组织构成,但这里只把它当作一个类似铰链的关节。
对于骨骼也作了简化,比如前臂本来是由尺骨和桡骨组成的,这里把尺骨和桡骨合并为一个骨骼,把骨骼看作不可形变的刚体。
关节是连结人体各部位的环节,也是人体运动的枢纽,是传递力和力矩、使人体能作正常运动的重要器官。
人体关节的自由度多,因而可实现许多精细运动。
人体各个关节(分为车轴关节、滑车关节、椭圆关节、鞍状关节、球窝关节)活动的方向与角度,与关节的表面形态有密切的关系,且决定着关节运动的自由度[ 2 ]。
一个物体沿X(Y、Z )轴方向移动称具有一个自由度,绕X(Y、Z )轴方向转动称具有一个自由度,要确定一个物体的空间位置和姿态至少需要六个自由度。
人体关节根据实际运动动作通常被模拟为圆柱绞、万向绞和球铰,它受到人体运动生理上的限制。
所有关节,在健康状态下加上肌肉和韧带的关系,某一关节的自由度不多于3 个,所以必须明确人体各关节运动的约束条件。
人体模型中各肢体之间存在一定的运动连带关系。
将关节看成点,将关节之间的骨骼看成是链,就可以按照运动关系将各肢体链接起来。
人体分层结构其实就是树形结构。
每个节点只有一个父亲,根节点无父亲;关节的父亲和儿子是骨骼,每个关节只有一个儿子;骨骼的父亲和儿子是关节;每块骨骼可能有多个子关节。
根据汉纳范(Hanavan)人体运动系统模型,总共定义了15 个关节15 块骨骼;根骨骼是下躯干骨骼,其父关节是jRoot,是面向世界坐标的,是树的总根。
3、三维人体模型设计实现针对人体模型的复杂性,采用参数化的方法来表述人体的拓扑信息、几何信息以及物理信息。
即把人体分成由不同的块和关节组成,各个块和关节用参数来描述,然后用树结构把各块的关系表示出来。
对于人体模型的构造过程,具体来说,可根据某一个块的参数来构造出人体某一部分的骨架,这个骨架是采用面向对象技术,由骨骼类、关节类按具体的基本形体来表现[ 4 ]。
人体模型的主要目的是进行人体运动仿真研究,以及提供虚拟现实或三维游戏角色。
运用面向对象技术将人体划分为骨骼类、关节类,按人体结构层次建立了人体多刚体模型,为今后实现人体运动打下了基础。
人体模型的各关节的活动均可由成员变量控制,这样就可以根据人体运动方程和碰撞检测结果,完成站立、坐下、下蹲、卧倒、步行、奔跑、跳跃、攀援、爬行、游泳、取物、推拉、射击等基本动作[1]。
开发者也可以根据需要,组合出更加复杂的人体动作。
三、汽车碰撞过程中人员响应的仿真建模通过人机工程分析, 构造多刚体系统的人体模型, 应用数理方法, 建立高速公路汽车碰撞乘员动力学响应的数学模型, 应用该模型可以部分代替实车碰撞试验, 进行汽车主、被动安全性能的计算机仿真研究以及乘员致伤机理研究。
近年来, 我国高速公路里程增长迅速, 由交通事故统计资料发现我国高速公路上汽车追尾冲突事故占很高的比例。
汽车发生追尾冲突时, 由于惯性, 乘员的头部、胸部、大腿和小腿等将发生移动和碰撞, 导致乘员身体受伤及颈部产生挥鞭样损伤。
以汽车正面碰撞事故中乘员的运动为原形, 在人因分析的基础上建立人体的物理和数学模型, 并进行计算机仿真, 研究汽车碰撞过程中乘员的动力学响应, 从而为交通事故中乘员损伤程度的判定、车内的安全保护设施的结构布置和材料特性以及它们对乘员安全影响的研究提供科学依据。
1、人因分析和人体建模在汽车碰撞研究中, 人体可用假人, 也可用力学和数学模型来模拟。
前者关键在于使研制出的假人能符合人体的生物学特点, 如模拟人体各关节的铰的自由度、刚度阻尼特性以及模拟人体肌肉材料的响应特性, 要符合人体实际情况。
后者关键在于所建立的人体模型的响应特性(如对冲击力、加速度等输入的响应) 应符合人体响应特性[ 1 ]。
人体运动仿真是由生物力学,计算机图形学,机器人学等学科交叉而形成新兴的研究方向。
人体建模的主要过程包括:(1) 确定人体模型的组成部分, 包括各部件(器官)、约束(关节) 及其几何外形等; (2) 取得描述人体模型的空间方位、几何及运动物理参数等各种数据; (3) 确定全局坐标系, 组装模型, 并使各部件的局部坐标简化, 便于分析计算; (4) 对人体模型初步校核, 消除尺寸误差, 限定各关节的运动范围; (5) 对人体模型添加附加约束、力和运动, 构造人机系统模型, 将其应用于具体问题中进行分析研究。
此外, 还可根据实际情况对人体模型及其环境适当简化而不影响分析结果, 从而更有利于模型的建立,实现运动仿真。
把坐姿状态的人体简化为由铰链接的七个刚体的多刚体系统, 如图所示。
刚体B i ( i = 1, 2, 3, 4, 5, 6) 分别代表人体的脚、小腿、大腿、身躯、头颈、上臂和前臂, 铰O i ( i = 1, 2, 3,4, 5, 6) 分别代表相应的关节。
由铰链接的刚体偶对之间的相对运动只有转动。
在对人体头颈部的仿真非常重要, 因为在实际的交通事故中由于头颈伤害致死的比例相当大[ 2 ]。
头颈的显著特点是颈椎相邻体之间有相对滑动, 因此在模型中将其定义为一个复合运动副, 即在三个方向转动的球面副的基础上增加了一个竖直方向滑动的移动副, 使其更接近头颈部真实的运动状态。
多刚体人体模型体铰示意图描述模型的参数主要包括:人体总体尺寸与各部位的尺寸、质量、惯量和体积等参数, 各种组织器官的密度、杨氏模量和泊松比等。
本人体模型所需数据主要包括: (1) 描述乘员的基本数据, 主要来自于文献[3 ]; 对中国成年人体几何参数, 主要参照了中国成年人体尺寸标准数据[ 4 ]; 力学参数主要参照文献[5 ] 中提供的实验所得中国成年人体的真实测量数据。
(2) 人体在碰撞前的运动参数(如位置、速度等)。
(3) 与运动有关的物理参数。
可通过对人体进行运动分析实验, 来获得其运动规律的实测值, 从而得出与运动有关的物理参数, 如刚度、弹性模量和阻尼系数等。
模型的运动响应时间序列图运用该模型对汽车碰撞中运动响应的时间序列进行了计算, 如上图所示, 其对应时间段的姿势与文献[6 ]、文献[7 ] 中对假人实验结果的描述基本符合, 表明所建人体模型具有很好的实用性。
2 碰撞的物理和数学模型2.1物理模型的建立乘员- 汽车系统的物理模型乘员- 汽车系统的简化方法:(1) 人体模型为由铰链接的七个刚体的多刚体系统;(2) 座椅靠背和头部保护装置用刚体框架代替, 其连接刚度用非线性弹簧和阻尼器模拟;(3) 座椅和头部保护装置的软垫及安全带用非线性弹簧模拟;(4) 乘员的脚和汽车内部底板之间的相互接触作用用非线性弹簧和阻尼器模拟。
所用弹簧和阻尼的运动和力学特性、链接处运动和力学特性由试验取得。
本文针对高速公路中汽车正面冲突的特点, 建立一个模拟汽车正面冲突中前、后两车乘员的动力学响应的二维八自由度模型, 如上图所示。
2.2数学模型的建立当前多刚体系统动力学研究方法很多, 主要有牛顿2欧拉法(N 2E 法)、拉格朗日2欧拉法(L 2E法)、罗伯森2维滕伯格法(R2W 法)、凯恩法(Kane 法)、变分法(Gau ss 最小约束原理法) , 本文将采用L - E 法进行动力学建模。