干涉法测微小量
郭昕,用于微小位移测量的双曝光全息干涉计量_0508138郭昕

全息技术基本原理及双曝光全息干涉计量技术在微小位移测量上的应用姓名:郭昕学号:0508138摘要:介绍了光全息的特点及技术原理,以及阴谋功用领域。
通过对悬臂梁受力前后双曝光全息图进行再现,测量出干涉条纹序数与相对应的位置坐标,进而得到微小位移。
顺带测出材料的杨氏模量。
关键词:全息技术;记录与再现;双曝光全息图;悬臂梁;微小位移1.引言40多年来,全息照相已成为信息光学最活跃的领域之一。
各种类型的全息图、全息元件和设备、全息检测方法和显示技术都到了发展;各种全息记录材料和全息产品获得了应用;越来越多的科技工作者们建立起了全息实验室,并开展了大量的学术研究和应用探索。
尤其是近十多余来,全息技术的发展使全息产品走向产业化,并开始深入到人们日常生活领域。
正如美国商务通信公司(BCC)所预测:“全息照相术正以活跃、最新和增长最快的高级技术工业之一的姿态呈现于世界。
2.光全息的技术特点及原理普通照相是根据几何光学成像原理,记录下光波的强度(即振幅),将空间物体成像在—个平面上,由于丢失了光波的相位,以而失去了物体的三维信息。
如果能够记录物光波的振幅和相位,并在一定条件下再现,则可看到包含物体全部信息的三维像。
即使物体己经移开,仍然可以看到原始物体本身具有的全部现象、包括三维感觉和视差。
利用干涉原理,将物体发出的持定光波以干涉条纹的形式记录下来,使物光波前的全部信息都贮存在记录介质中,故所记录的干涉条纹图样被称为“全息图”。
当用光波照射全息图时,由于衍射原理能重现出原始物光波,从而形成与原物体逼真的三维像。
这个波前记录和重现的过程称为全息术或全息照相。
2.1 全息照相技术的特点和优越性1. 全息照相最突出的特点为由它所形成的三维形象一张全息图看上去很象一扇窗子,当通过它观看时,物体的三维形象在眼前,让人感觉到形象就要破窗而出。
如果观察者的头部上下、左右移动时,就可以看到物体的不同侧面。
所看到的整个景像是那样的逼真,完全没有普通照片给予人们的隔膜感。
基于迈克尔逊干涉原理的微小位移测量方法研究
Science &Technology Vision科技视界0引言干涉测距系统具有极高的测量精度和较强的环境抗干扰能力,在设备的机械振动精密测量和物理缺陷检测等方面,有着良好的借鉴价值和广泛的应用前景。
祝继彬[1]利用光学倍频方法延长了光路的光程差,从而提高了迈克尔逊干涉仪的灵敏度与精度。
Archbold 等人[2]通过采集激光照射在物体表面的散斑图像来分析物体表面位移。
杜振辉等人[3]提出了一种基于激光光栅多普勒效应的微振动测量系统。
本文根据迈克尔逊干涉测量原理搭建了一种新型激光干涉测量系统,该系统通过加载偏振分光镜来改善条纹的清晰度并制作狭缝贴在光电探测器上以提高光电信号的采集精准度,调整光电探测器放大增益来提高干涉条纹光信号的稳定性。
1实验装置及原理基于传统迈克尔逊干涉测量原理,本文提出了一种新型激光干涉测量系统,在测量精度与准确度方面都得到了很大提升。
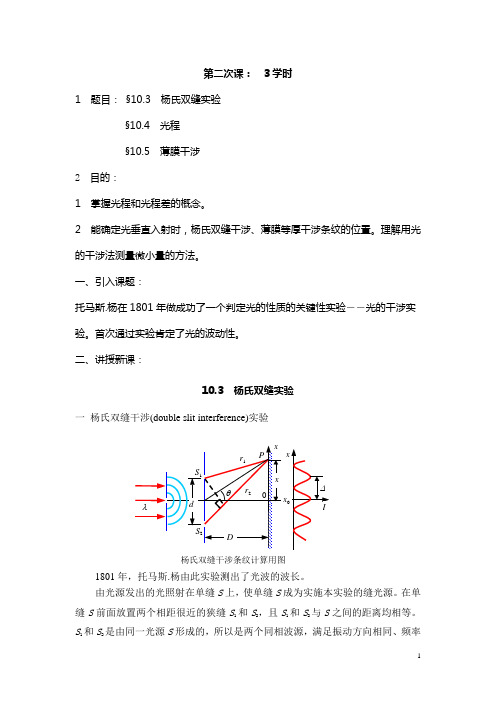
其干涉原理如图1所示,He -Ne 激光器作为光源输出一束具有线偏振态的激光束,被分光镜按1:1的分光比分成两束光,一束光N 1经过反射镜两次反射,到达偏振分光镜汇聚点,即作为参考光。
另一束光N 2穿过分光镜和偏振分光镜,并且经过M1(被测反射镜)反射到达偏振分光镜汇聚点,即作为测量光。
两束光在汇聚点形成干涉,实现光强叠加得到干涉光。
干涉光经过S (凸面镜)放大照射在被狭缝包装的光电探测上,经光电探测器将光信号转换为电信号由示波器和上位机进行双向数据处理。
图1系统示意图当反射镜M1产生位移时,干涉条纹会随着位移移动而明暗相间的变化。
位移变化量为[4]:Δd =λ2N (1)式中:Δd 为图中被测反射镜M1位移L1的距离,λ为He -Ne 激光器的激光波长,N 为干涉条纹的变化数目。
在光电探测器探测中依据光电信号转换原理,参考光与测量光在光电探测器中引起的电场强度分别为[5]:基于迈克尔逊干涉原理的微小位移测量方法研究闵渭兴张周强胥光申李晓飞(西安工程大学<机电工程学院>,陕西西安710048)【摘要】针对传统迈克尔逊干涉测量位移精度较低的问题,本文提出了一种新型迈克尔逊干涉测量方法,该方法通过增加偏振分光棱镜来提高干涉条纹的明暗变化,很大程度上克服了传统迈克尔逊干涉灵敏度和测量精度较低的问题。
第三节 杨氏双缝实验
第二次课:3学时1 题目:§10.3 杨氏双缝实验§10.4 光程§10.5 薄膜干涉2 目的:1 掌握光程和光程差的概念。
2 能确定光垂直入射时,杨氏双缝干涉、薄膜等厚干涉条纹的位置。
理解用光的干涉法测量微小量的方法。
一、引入课题:托马斯.杨在1801年做成功了一个判定光的性质的关键性实验――光的干涉实验。
首次通过实验肯定了光的波动性。
二、讲授新课:10.3 杨氏双缝实验一杨氏双缝干涉(double slit interference)实验1801由光源发出的光照射在单缝S上,使单缝S成为实施本实验的缝光源。
在单缝S前面放置两个相距很近的狭缝S1和S2,且S1和S2与S之间的距离均相等。
S和S2是由同一光源S形成的,所以是两个同相波源,满足振动方向相同、频率1相同、相位差恒定的相干条件。
故S 1和S 2为相干光源。
当S 1和S 2发出的光在空间相遇,将产生干涉现象,在屏幕P 上将出现明、暗交替的干涉条纹。
1 分波阵面获得相干光,满足振动方向相同,相位差恒定,频率相同的干涉条件。
2 合光强 将代入3 P 点处的波程差21r r r ∆=-,(空气的折射率 n = 1 )在 D >>d , D >>x ,即 θ 很小时21sin tan xd r r r d d Dθθ=-≈≈= (其中D x=θtan )5 双缝干涉的明暗纹条件20,1,2,(21)0,1,2,k k k k πφπ=⎧=⎨+=⎩明纹干涉相长暗纹干涉相消0,1,2,(21)0,1,2,k k dr x k D k λλ±=⎧==⎨±+=⎩明纹干涉相长暗纹干涉相消6 干涉明暗条纹的位置 1) 干涉明暗纹的位置(),0,1,2,21,(21)0,1,2,22d Dr k x x k k D d d Dr k x x k k Ddλλλλ∆====±∆=+==+=±明纹则,暗纹则,()1202021cos 4cos 2I I I I I φφφ=++∆=+∆∆=dr x D∆=()2122r r rππφλλ∆=-=∆204cos I I r πλ=∆I =040I 2(21)k k φπφπ∆=∆=+()212r k r k λλ∆=∆=+0, 1. 2. 3...k =±±±两相邻明纹或暗纹的间距都是D x dλ∆=其它 x 点的亮度介于明纹和暗纹之间,逐渐变化 7 综上所述,杨氏双缝干涉的特点:1) 用分振幅法获得相干光,两束光初相位相同,均无半波损失; 2) 干涉明暗纹是等间距分布,相邻明纹间的距离与入射光的波长成正比,波长越小,条纹间距越小;3) 若用白光照射,则在中央明纹(白光)的两侧将出现彩色条纹。
干涉显微镜测量原理

干涉显微镜测量原理
干涉显微镜测量原理是一种利用光干涉现象进行测量的方法。
该原理基于干涉仪的原理,利用光波的干涉现象来测量待测物体的形状和大小。
干涉显微镜的基本构造包括两个反射镜和一个光源。
光源通过透镜聚焦,然后经过一个分束器分成两束光,分别照射到待测物体的两个表面上。
由于待测物体表面的形状不同,两束光在经过物体表面反射后会产生相位差。
当这两束光重新汇聚时,就会发生干涉现象。
根据干涉现象的原理,当两束光的相位差达到某一特定条件时,就会出现明暗条纹,从而可以通过观察这些条纹来推断待测物体的表面形状。
干涉条纹的形状和间距与待测物体的厚度或高度有关,因此可以通过测量干涉条纹的参数来确定物体的大小。
干涉显微镜还可以用于测量物体的表面粗糙度。
当待测物体表面粗糙时,反射光的相位差会随着表面不平整度的增加而发生变化。
通过观察干涉条纹的变化,可以推断物体表面的粗糙度。
总结来说,干涉显微镜利用光波的干涉原理进行测量,通过观察干涉条纹的形状和变化来推断待测物体的形状、大小和表面粗糙度。
这种测量原理对于微小尺寸的物体非常有效,因此在纳米技术和微电子学领域具有重要应用价值。
微差测量法

微差测量法介绍微差测量法是一种用于测量微小变化的量测方法。
它广泛应用于各个领域,如工程、物理、地质、生物等。
微差测量法基于测量对象与参考对象之间的微小差异,通过精密的仪器和技术手段进行测量和分析。
优势微差测量法具有以下优势: 1. 高精度:微差测量法可实现亚微米、纳米甚至更高精度的测量,满足对于微小变化的高精度要求。
2. 非接触式:微差测量法不需要与测量对象直接接触,避免了触碰对测量结果的影响,同时也更适用于对脆弱物体或无法接触的物体进行测量。
3. 快速高效:微差测量法可快速获取测量结果,提高了工作效率。
4. 多功能:微差测量法可应用于多种物理量的测量,如长度、位移、形变、温度等。
原理微差测量法的原理基于以下几个方面: ### 1. 干涉原理干涉原理是微差测量法的核心原理之一。
干涉通过光、声波或电磁波等的叠加来实现测量对象与参考对象之间微小差异的测量。
通过观察干涉现象的变化,可以获得被测量物体的微小变化信息。
2. 位移传感器位移传感器是微差测量法中常用的测量设备之一。
位移传感器可以精确地感知测量对象的微小位移或形变,并将其转化为电信号进行测量和分析。
常见的位移传感器包括激光位移传感器、电容位移传感器、压电传感器等。
3. 数据处理与分析微差测量法不仅要求高精度的测量仪器,还需要进行精确的数据处理与分析。
通过采集传感器输出的信号,结合合适的算法和计算方法,可以准确地获取测量对象的微小变化信息。
常用的数据处理与分析方法包括滤波、拟合、积分等。
应用领域微差测量法在各个领域中有着广泛的应用,包括但不限于以下几个方面: ### 1. 工程领域微差测量法被广泛应用于工程领域中的结构监测、变形分析等工作。
例如,可以通过微差测量法监测建筑物、桥梁等结构物的位移变化,及时发现问题并采取相应的措施。
2. 物理研究在物理研究中,微差测量法可以用于测量光学、声学、电磁等物理量的微小变化。
例如,可以通过干涉测量法研究光学中的干涉现象,获取光学元件参数的微小变化。
物理测量长度的方法

物理测量长度的方法一、直接测量法直接测量法是指直接利用测量工具 (如尺子、卷尺、卡尺等) 对物体的长度进行测量的方法。
这种方法简单易行,精度较高,适用于大多数常见物体的长度测量。
1. 尺子测量法尺子测量法是最常见的直接测量法。
使用一把刻度尺,将尺子的一端对准物体的一端,读取尺子上的刻度值,即可得到物体的长度。
尺子测量法的优点是简单易学,测量精度较高,适用于大部分常见物体的长度测量。
2. 卷尺测量法卷尺测量法是将卷尺展开,将卷尺的一端对准物体的一端,读取卷尺上的刻度值,即可得到物体的长度。
卷尺测量法适用于测量曲线或不规则形状的物体的长度。
3. 卡尺测量法卡尺测量法是一种高精度的长度测量方法,适用于测量微小长度。
卡尺的测量原理是将两个卡爪分别放在物体的两端,读取卡尺上的刻度值,即可得到物体的长度。
二、间接测量法间接测量法是指通过测量与物体长度相关的其他物理量,从而推算出物体的长度的方法。
1. 三角函数法三角函数法是一种通过测量角度和边长,推算出物体长度的方法。
使用三角函数法需要知道物体的角度和边长,通过三角函数的计算,可以推算出物体的长度。
2. 相似三角形法相似三角形法是一种通过测量物体的相似三角形的边长,推算出物体的长度的方法。
使用相似三角形法需要知道物体的相似比,通过相似三角形的计算,可以推算出物体的长度。
三、微小长度测量法微小长度测量法是指测量微小长度的方法,适用于测量微米以下级别的长度。
1. 显微镜测量法显微镜测量法是一种通过使用显微镜观察物体,并测量其长度的方法。
使用显微镜测量法需要将物体放在显微镜下观察,通过读取显微镜上的刻度值,可以推算出物体的长度。
2. 干涉仪测量法干涉仪测量法是一种通过利用光的干涉原理,测量物体长度的方法。
测试微小沟槽深度的方法
测试微小沟槽深度的方法
测试微小沟槽深度的方法有多种,以下是其中几种常用的方法:
1. 直接测量法:使用高精度的测量工具,如测微计、千分尺等,直接测量沟槽的深度。
这种方法适用于沟槽深度较小且测量精度要求较高的场合。
2. 间接测量法:通过测量沟槽的宽度和斜率,利用三角函数计算沟槽的深度。
这种方法适用于沟槽深度较大且测量精度要求不高的场合。
3. 光学干涉法:利用光学干涉原理,通过测量干涉条纹的数量来计算沟槽的深度。
这种方法具有较高的测量精度和分辨率,但需要使用较为复杂的干涉仪器。
4. 光学显微镜法:利用光学显微镜对沟槽进行观察,通过测量显微镜中沟槽的深度来推算实际沟槽的深度。
这种方法适用于沟槽深度较小且需要观察沟槽内部细节的情况。
5. 电子显微镜法:利用电子显微镜对沟槽进行观察和测量,可以获得更高的测量精度和分辨率。
这种方法需要使用较为昂贵的电子显微镜设备。
在选择测试微小沟槽深度的方法时,应根据具体的情况选择适合的方法,以达到最佳的测量效果。
微小尺度位移的测量
xxxxxx 学士学位论文微小尺度位移的测量2013年5月30日独创声明本人郑重声明:所呈交的毕业论文(设计),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。
尽我所知,除文中已经注明引用的内容外,本论文(设计)不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
此声明的法律后果由本人承担。
作者签名:二〇一年月日毕业论文(设计)使用授权声明本人完全了解鲁东大学关于收集、保存、使用毕业论文(设计)的规定。
本人愿意按照学校要求提交论文(设计)的印刷本和电子版,同意学校保存论文(设计)的印刷本和电子版,或采用影印、数字化或其它复制手段保存论文(设计);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布论文(设计)的部分或全部内容,允许他人依法合理使用。
(保密论文在解密后遵守此规定)论文作者(签名):二〇一年月日毕业论文结题报告毕业论文成绩评定表注:总成绩=指导教师评定成绩(30%)+评阅人评定成绩(20%)+答辩成绩(50%),将总成绩由百分制转换为五级制,填入本表相应位置。
目录1.引言 12.光学测量技术 2 2.1 电子散斑干涉技术 2 2.1.1电子散斑干涉技术简介 2 2.1.2散斑干涉测量原理 3 2.2 莫尔条纹测量原理 4 2.2.1莫尔条纹简介 4 2.2.2莫尔条纹技术的测量原理 4 2.3 光杠杆法 6 2.3.1光杠杆法简介 6 2.3.2光杠杆法的实验原理 62.3.3光杠杆的应用73 电学测量技术8 3.1 电感式位移测量8 3.1.1电感式传感器简介8 3.1.2电感式传感器的测量原理9 3.2 电容式位移测量10 3.2.1电容位移传感器简介103.2.2电容式位移测量测量104. 总结13 参考文献14 致谢14微小尺度位移的测量xxx(物理与光电工程学院xxxx xx级x班xxxxxx)摘要:微小位移测量技术可以实现实时,精度高,非接触,大范围的精确监控测量,因此它有着广泛的应用范围和应用前景。
物理实验中位移的测量与分析方法
物理实验中位移的测量与分析方法在物理实验中,位移是一个非常重要的物理量,它描述了物体在空间中的位置变化。
而准确测量位移对于研究物体的运动规律以及验证理论模型具有关键性的意义。
本文将介绍几种常见的物理实验中位移的测量与分析方法。
一、直观测量法直观测量法是指通过肉眼或仪器直接观察目标物体的移动情况,并对其位移进行估计和记录。
这种方法通常适用于需要较粗略测量的情况,比如通过目视观察来测量物体的长度或移动距离。
然而,由于人眼视觉的限制以及人为误差的存在,直观测量法在测量精度方面存在一定的局限性。
二、刻度尺测量法刻度尺测量法是一种基础的位移测量方法,通过使用标有等距刻度的尺子或测量仪器,可以直接读取目标物体在直线方向上的位移。
这种方法常用于测量长度、高度或位移较小的物体,如螺旋测微器可用于测量微小位移。
三、位移传感器测量法位移传感器测量法是一种使用物理传感器来测量物体位移的方法。
常见的位移传感器包括光电、电感、电容和压阻传感器等。
例如,光电传感器通过检测光线的反射或透射来测量物体的位移,电阻变化传感器则通过测量电阻的变化来计算位移。
位移传感器测量法在测量精度和稳定性方面具有优势,适用于对位移要求较高的实验。
四、干涉法测量位移干涉法是一种基于光波干涉原理来测量物体位移的方法。
常见的干涉法包括光栅干涉、迈克尔逊干涉和薄膜干涉等。
这些方法利用光的干涉现象可以非常精确地测量物体位移,其测量精度可以达到亚微米甚至纳米级别。
干涉法广泛应用于精密加工、光学测量以及材料力学等领域。
五、图像处理法测量位移图像处理法是一种利用图像信息进行位移测量的方法。
通过对物体的图像进行采集和处理,通过计算图像中物体位置的变化来测量位移。
这种方法通常使用在无法直接接触物体的测量场景中,例如流体力学实验、机器视觉和运动分析等。
图像处理法在位移测量方面具有高灵敏度和非接触性的优势,但对于图像的质量和算法的准确性有一定的要求。
总结起来,物理实验中位移的测量与分析方法多种多样。
基于扭秤的激光干涉差动测量微小冲量方法
基于扭秤的激光干涉差动测量微小冲量方法叶继飞;洪延姬【摘要】基于扭秤测量冲量原理,结合激光干涉法差动测量角度的方法,提出一种基于扭秤的激光干涉差动测量微小冲量的方法.介绍系统的基本组成和测量过程,给出扭秤结构设计参数,并对系统参数进行了标定,结合设计参数与标定结果,对系统的分辨率、量程和精度进行了校核,在典型的测量环境下,对激光烧蚀靶材所形成的μN·s 量级微小冲量进行了测量,给出了典型的测量结果并进行分析.结果表明:所提出的基于扭秤的激光干涉差动测量微小冲量方法,系统分辨率可达10-7N·s量级,测量范围跨5个数量级,最大可以测量10-2N·s量级冲量,测量精度优于95%.【期刊名称】《应用光学》【年(卷),期】2013(034)006【总页数】5页(P990-994)【关键词】微冲量测量;扭摆;激光干涉;激光微烧蚀【作者】叶继飞;洪延姬【作者单位】装备学院激光推进及其应用国家重点实验室,北京怀柔101416;装备学院激光推进及其应用国家重点实验室,北京怀柔101416【正文语种】中文【中图分类】TN24引言扭秤是一种测量冲量的经典摆系统,微小冲量或推力加载于摆臂,摆臂发生转动的同时,通过与摆臂连接的扭矩件产生与摆动方向相反的反向扭矩,形成摆动动作的回复,构成一种二阶的质量-弹簧-阻尼系统,用于测量较小的冲量或推力[1-2]。
用于微小冲量测量的扭秤装置大同小异,典型的如美国 C.R.Phipps等人研制的扭秤装置[3]。
Phipps的扭秤装置上端固定玻璃纤维悬丝,下端系一钢球,钢球浸在阻尼油中,悬丝中部固定横梁,横梁一端为靶材,另一端为配重,横梁和悬丝组成扭秤。
推力作用于扭秤臂,产生扭矩使扭秤振动,由探测激光束和位于横梁中部的反射镜构成光杠杆,将振动放大,通过测量标尺上光点的位移来反射激光束的转角进而测量横梁的转角,根据横梁转角与冲量成正比的原理计算冲量[4]。
阻尼油的作用是降低两次实验之间的等待时间[5]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 姓名:翟旭明 学号:PB05210058 实验组号:27 组内编号:9
2. 实验题目:干涉法测微小量
3. 目的要求:
通过本次试验,学习、掌握利用光的干涉原理检验光学元件表面几何特征
的方法,用劈尖的等厚干涉测量细丝直径的方法,同时加深对光的波动性的认识。
4. 仪器用具:牛顿环仪、劈尖盒、读数显微镜、钠光灯等。
5. 实验原理:
1、用牛顿环测平凹透镜的曲率半径:nDDRmnm422。2、劈尖的等厚
干涉测细丝直径:2Lnd。
6. 实验内容:
1、测平凹透镜的曲率半径:(1)观察牛顿环;(2)测牛顿环直径;(3)
用逐差法处理数据。2、测细丝直径。
7. 数据表格:
1、测平凹透镜的曲率半径。
环数 d1(mm) d1'(mm) d2(mm) d2'(mm) d3(mm) d3'(mm)
10 11.582 6.32 11.653 6.39 11.583 6.333
20 12.44 5.462 12.516 5.521 12.445 5.459
30 13.134 4.769 13.197 4.892 13.139 4.781
40 13.714 4.189 13.785 4.256 13.72 4.208
50 14.233 3.681 14.308 3.732 14.25 3.688
60 14.705 3.206 14.781 3.274 14.716 3.211
2、测细丝直径。
l1(mm) l2(mm)
18.123 15.216
13.541 10.569
14.041 11.082
8. 数据处理及结果:
1、测平凹透镜的曲率半径。
利用公式mmmddD'、3/)(321DDDD和2230mmDD计算结果如
下:
环数 D1(mm) D2(mm) D3(mm) Mean(D) (mm) D2m+30-D2m(mm)
10 5.262 5.263 5.250 5.258333 63.0184145555556
20 6.978 6.995 6.986 6.986333 62.7751576666667
30 8.365 8.305 8.358 8.342667 62.7342596666667
40 9.525 9.529 9.512 9.522000
50 10.552 10.576 10.562 10.563333 Mean(D2m+30-D2m) (mm)
60 11.499 11.507 11.505 11.503667 62.8426106296296
将钠光灯波长λ=589.44nm、n=30和D2m+n-D2m=62.8426106296296mm2代入如下公式:
mmmmmmmmnDDRmnm888450770.8881058944.03042968426106296.6243222
以下计算不确定度,先计算D的B类标准不确定度如下:
ΔB(d)=0.004mm由d传递给D=d-d'成为ΔB(D)=2×ΔB(d) =2×0.004mm =0.008mm。
由D1、D2和D3的值,依照公式))1(/()()(12nnDDDuniiA和
22
68.0)/()(CutUBAp
计算出各个环直径的A类标准不确定度,并与B
类不确定度一起计算出每个的合成不确定度如下表:
D1(mm) D2(mm) D3(mm) uA(mm) tp ΔB(mm) C U0.68(mm)
5.262 5.263 5.250 0.00418 1.32 0.008 3 0.006128215
6.978 6.995 6.986 0.00491 1.32 0.008 3 0.007008357
8.365 8.305 8.358 0.01894 1.32 0.008 3 0.025142615
9.525 9.529 9.512 0.00513 1.32 0.008 3 0.007277752
10.552 10.576 10.562 0.00696 1.32 0.008 3 0.009566387
11.499 11.507 11.505 0.00240 1.32 0.008 3 0.004140934
由于R的公式中:
3601204260250240230220210223022DDDDDDDDn
DDRmmmnm
故可以利用公式180)()(68.0mmDUDRU计算出U0.68(R)。
将下表的数据和λ=589.44nm代入上面的U0.68(R)公式计算得:
环数 Mean(D) (mm) U0.68(D) (mm) Mean(D)×U0.68(D) (mm2)
10 5.258333 0.006128215 0.032224197974
20 6.986333 0.007008357 0.048962716482
30 8.342667 0.025142615 0.209756459842
40 9.522000 0.007277752 0.069298756832
50 10.563333 0.009566387 0.101052931760
60 11.503667 0.004140934 0.047635925423
mmmm.mmmm.DUDRUmm521796746707941044.5891801350893098830180)()(6268.0
因此实验的最终结果表达式为:
99.0,)14888()(3)(95.0,)10888()(2)(68.0,)5888()()(68.099.068.095.068.068.0PmmRURRURR
PmmRURRURR
PmmRURRURR
2、测细丝直径。
利用每个l1和l2求出Δl= l1-l2如下表:
l1(mm) l2(mm) Δl (mm)
18.123 15.216 2.907
13.541 10.569 2.972
14.041 11.082 2.959
求出Δl的平均值为Δl= 2.946mm。
将Δl= 2.946mm、L=38.725mm和λ=589.44nm代入如下公式计算出细丝直径:
mmmmmmmmmmlLd077482.0077481549.021058944.0946.220725.382203
9. 作业题:
1、因为空气膜的上表面的曲率半径极大、曲率极小,在这样的情况下,AD=CD、
AB=BC=δ。因此Δ=AB+BC+CD-AD+λ/2可以写成Δ=2δ +λ/2。
2、牛顿环中心的级次是0,是暗斑。因为δ=0时,Δ=λ/2,所以是暗斑。
3、因为条纹的边界并不是非常的清晰,因此比较难把握测量的范围。但是如果
测量的条纹数量加大,就可以通过增大分母来减小每个条纹测量时的误差。
10. 讨论: