全数字电源设计
基于STM32F334的数字BUCK电源设计
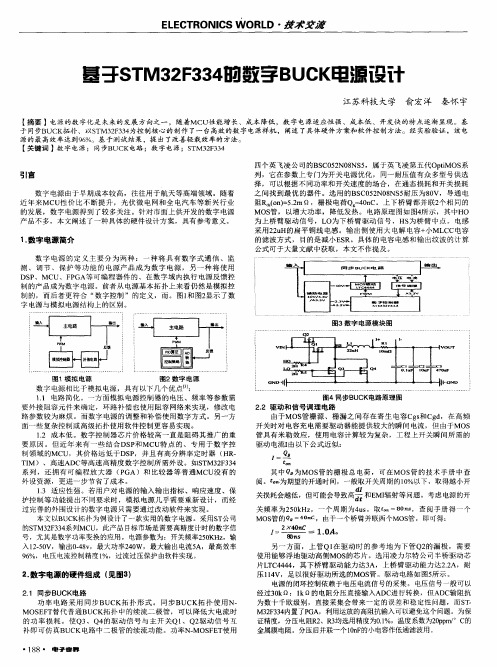
四个英 飞 凌 公司 的BSC052N08NS5,属 于 英 飞凌第 五 代OptiMOS系 列 ,它 在 参数 上 专 门为开 关 电源优 化 , 同一 耐压值 有 众 多型 号供 选 择 ,可 以根据 不 同功 率和 开关 速度 的场 合 ,在 通态 损 耗和 开 关损 耗 之 间找 到最 优 的器 件 。选 用 的BSCO52NO8NS5耐压 为 8Ov,导 通 电 阻R (on)=5.2mQ,栅 极 电荷Q ̄40nC。上 下桥 臂 都并 联2个 相 同 的 MOS管 , 以增大 功 率 ,降低 发热 。 电路 原理 图如 图4所示 ,其 中HO 为 上桥 臂驱 动 信 号 ,LO为 下桥 臂驱 动 信 号 ,HS为 桥 臂 中 点 。电感 采用 22uH的扁 平 铜线 电感 。输 出侧 使 用 大 电解 电容 +d ̄MLCC电 容 的滤 波 方式 , 目的是减 小EsR。具体 的 电容 电感 和输 出纹波 的计 算 公式 可 于大量 文 献 中获取 ,本 文不 作提 及 。
护 控 制等 功 能提 出不 同要求 时 ,模拟 电源几 乎 需要 重新 设计 ,而经
过完 善 的外 围设 计 的数字 电源 只 需要通 过 改动 软件 来实 现 。
本文 以BUCK拓 扑为例设计 了一款 实用 的数字 电源 。采用 ST公 司
的sTM32F334系列Mcu,此产 品 目标 市场 是需要 高精度 计时 的数 字信 号 ,尤 其是数字 功率变换 的应用 。电源参 数为 :开关 频率250KHz,输
图3数字 电源模块 图
图 1模 拟 电源
图2数 字 电 源
数字 电源 相 比于 模拟 电源 ,具 有 以下 几个 优点 口】:
1.1 电路 简 化 。一方 面 模拟 电源 控 制 器的 电压 、频 率 等参 数 需 要 外接 阻容 元件 来 确 定 ,环路 补偿 也使 用 阻容 网络 来 实现 ,修 改 电
全数字化特种电源实时并机系统研究

育 部 产 学 研 结合 项 目( 0 0 0 0 0 7 , 0 1 0 0 0 0 1 2 1 B 9 4 0 2 2 1B 9 0 8 ) 4 4 定 稿 日期 : 0 1 1 — 2 2 1 — 2 0
该系统采用 多任 务实 时系统 结构 . 提高系统 处理 速度, 并且设计 实验验证 了系 统的均流特 性和数 据传输 的实时性。
2 特 种 电 源 的 数 字 化 并 机 方 案
21 并 机 均 流 方 案 .
并 机 均 流 方 案 可 分 为 输 出 阻 抗 法 、 从 控 制 主 法 、 均 电流 自动 均 流 法 、 大 电流 自动 均 流 法 平 最
Re e r h o Ful Di ia a .i e Pa a l lCo t o lr s a c n l g t lRe 1tm r l n r le e f r S ca o pe i l Powe upp y rS l
L UO e — e I Z iz o g ,W ANG h n mi W iw i ,L h —h n Z e - n ,HE Mi o l i a— e
21 0 2年 6月
P w rE e t n c o e l cr i s o
J n 01 u e2 2
以很 好 地 实 现 平 均 电流 法 。
平 均 电流 法 是通 过均 流母 线 获 得 系 统 的平 均
时可忽略不计 。因此 ,A C N延 时 主 要 由仲 裁 延 时
理 能力 , 并在 网络利 用率 最大 化前 提下 , 过加 入 备用 机控 制算 法 , 高系统 的稳 定性 和输 出功率 的上 限 。最 通 提 后, 采用 A M芯 片设 计 了数字 化实 时并机 系统 , R 并在 两 台 2 W 的特 种 电源 样机 上 进行 了均 流特 性和 实 时性 5k
毕业设计106可简易数字显示的集成直流稳压电源的设计

设计课题:可简易数字显示的集成直流稳压电源的设计一设计目的:通过可简易显示的直流稳压电源的设计、安装和调试,要学会:⑴选择变压器、整流二极管、滤波电容及集成稳压器来设计直流稳压电流;⑵掌握直流稳压电路的调试及主要技术指标的测试方法。
⑶选择合适的A/D转换芯片和各种辅助设计IC,并掌握它们的各种指标和性能;⑷掌握软件控制显示和A/D转换方法和硬件电路的连接,巩固汇编语言设计的基本知识及技巧;⑸学会模拟和数字电路的汇合设计,体会其中的要点和难点;⑹掌握软硬件结合安装调试的方法和熟练掌握印制电路板技巧;⑺通过设计加深对基础知识的认知和个学科间的联系,能基本的进行综合电路课题的设计。
二技术指标:⑴两路基本电压输出±5V和±12V电压、一路可调0~20V可显示电压输出,最大输出电流为1.5A。
⑵输出纹波电压5~6mV,输出电流大于1A⑶输出功率≥20W,总体谐波失真小于0.2%,稳压系数S v≤5×10-3。
⑷数字电压表四位显示,分辨率小于20mV,可连续可调。
显示范围为四档:Ⅰ:0~5V、Ⅱ:5~10V、Ⅲ:10~15V、Ⅳ:15~20V。
⑸可外接测量范围0~20V的电压,具有自动换档的功能。
三设计要求:⑴合理选择设计方案、独立元器件和各种芯片;⑵完成全电路理论设计、安装调试、绘制电路图和制作电路板;⑶撰写设计报告、调试总结报告及使用说明书。
四设计内容:1:基本原理1.1:直流集成稳压电源原理交流电源电压经电源变压器变换成整流电路所需的交流电压植后,通过整流电路变成单向脉冲电压,再由滤波电路滤去其中的交流分量,得到较平滑的直流电压,最后经稳压电路获得稳定的直流电压。
1.2:数字电压显示原理直流电压经过模数转换器进行采样、量化与编码输出二进制代码,由单片机系统进行处理,一方面根据计算结果去自动切换量程;另一方面通过显示系统进行实时的显示输出电压值。
2:结构框图3:单元电路设计3.1:直流稳压电源3.1.1方案选择在两种方案中,第一种是用的集成度很高的稳压管,如图下,它里边除了增加了一组启动电路外,其余部分与一般的串联型稳压电路完全一样,其基准电压源的保护性更高,保护电路更完善。
纯正弦波逆变器电路图大全(数字式-自举电容-光耦隔离反馈电路图详解)

纯正弦波逆变器电路图大全(数字式/自举电容/光耦
隔离反馈电路图详解)
纯正弦波逆变器电路图(一)
基于高性能全数字式正弦波逆变电源的设计方案
逆变电源硬件结构如图2所示。
主要包括直流推挽升压电路、正弦逆变电路、输出滤波电路、驱动电路、采样电路、主控制器和点阵液晶构成。
其中,直流升压部分将输入电压升高至输出正弦交流电的峰值以上的母线直流电压,正弦逆变部分将母线直流电压逆变后经输出滤波电路得到正弦式交流电,采样电路则对母线电压、母线电流、输出电压、输出电流、输入电压进行采样,以实现短路保护、过压欠压保护、过流保护、闭环稳压等功能。
驱动电路的功能是将驱动信号的逻辑电平进行匹配放大,以满足驱动功率管的要求。
控制电路的功能是产生驱动信号,并对采样信号进行处理,以实现复杂的系统功能。
点阵液晶的功能是显示系统工作信息,如果输出电压、电流以及保护信息等。
图2
1)主控制器。
Zilker Labs数字电源新方案

Z 20 L 1 5可作 为数字 构建 块 ,能够 与 其它 D gt- ii l a DC器 件 定 的应用 中,设计 人 员只需 通 过 引脚 带选 择对 每个 芯 片 结 合 ,以提供 面 向板 级 电源管理 与 转 换应 用 的全 面解决 进行 配置 ,并将每 个器 件 的 串行 总线 (MB s 连接 起 来 S u)
在 主要考 虑 因素 范 围之 内。这样 ,高性 能和 低成 本就 成 体 声驱 动器 , 适用 于高 供 电 电压 的单芯 片输 出级 驱动 器 , 为 音频芯 片 的两个 主 要发展 方 向 。 并按 照不 同 的操作 电压 、 能等 分 为 3 级别 : M4 0 C 性 个 L 72 近期 ,美 国 国家 半导体 公 司( s 针对 高保 真 、商 眭 专 供广 大 的消 费 电子产 品市 场 ,包 括立 体 声音 响系 统及 N) 能和专业 级音 频 系统 ,以及医疗 、工 业设 备 推出 了两款 音 像设 备接 收器 ;L 7 2 M4 0 B的额 定 电压 高达 ± 2 V~± 0 产品 : 运算放 大器 L 5 2 高压 立体 声驱 动器 L 7 2 10 且 技术要 求 更为 严格 , M4 6 和 M4 0 。 0 V, 最适 用 于高 端音 响 系统 、 吉 L 5 2 突 出 的特点 就 是将 总谐 波 失真 限 制在 了 他 放大 器 、专 业级 音频 放 大器 以及 高度 原 音的 无源 扬声 M4 6 最
方案。 即 可 。然后 这些 器件 便 可通 过 S MBu 相 互通 信 ,并可 独 s
数字电源常用控制算法

数字电源常用控制算法数字电源的控制算法是指用于调节和控制数字电源输出电压和电流的计算方法和策略。
数字电源控制算法的设计和实现对于数字电源的性能和稳定性具有重要影响。
本文将介绍几种常用的数字电源控制算法。
一、PID控制算法PID控制算法是一种经典的控制算法,在数字电源控制中得到了广泛应用。
PID控制算法通过对输出电压和电流与设定值之间的误差进行比例、积分和微分的运算,来调节控制器的输出信号,实现对数字电源输出的精确控制。
PID控制算法具有简单、稳定、易于实现的特点,在数字电源控制中表现出较好的性能。
二、PWM控制算法PWM控制算法是一种将输入信号转换为脉冲宽度调制信号的控制算法。
在数字电源控制中,PWM控制算法通过调节输出脉冲的占空比来控制数字电源输出的电压和电流。
PWM控制算法具有快速响应、高精度和高效率的特点,在数字电源控制中得到了广泛应用。
三、模糊控制算法模糊控制算法是一种基于模糊逻辑推理的控制算法。
在数字电源控制中,模糊控制算法通过建立模糊规则库和模糊推理机制,将输入信号的模糊化处理和输出信号的去模糊化处理相结合,实现对数字电源输出的控制。
模糊控制算法具有较好的鲁棒性和适应性,能够有效应对数字电源输出的非线性和不确定性。
四、神经网络控制算法神经网络控制算法是一种基于神经网络模型的控制算法。
在数字电源控制中,神经网络控制算法通过训练神经网络模型,将输入信号映射为输出信号,实现对数字电源输出的控制。
神经网络控制算法具有较好的自适应性和学习能力,能够适应数字电源输出的动态变化和非线性特性。
五、遗传算法控制算法遗传算法控制算法是一种基于进化计算的控制算法。
在数字电源控制中,遗传算法控制算法通过建立适应度函数和遗传操作,对控制参数进行优化,实现对数字电源输出的控制。
遗传算法控制算法具有全局搜索能力和较好的优化效果,能够找到数字电源控制的最优解。
六、模型预测控制算法模型预测控制算法是一种基于数学模型的控制算法。
完整的UPS电源设计方案

1.1.1.设计说明本方案为通用方案,X省、X市两地在设计思路上保持一致,但考虑X 市机房楼板承重,X市地区机房UPS电池的摆放方式为平铺。
1.1.2.单机满载后备钟蓄电池配置电池容量计算:电池组容量(Ah)=UPS容量(VA)*功率因素*后备时间/(直流电压(V)*蓄电池放电系数*逆变效率)UPS电源容量:60KVA电池组电压:348V逆变效率:0.93后备时间:180分钟(3小时)后备3小时蓄电池放电系数:0.75据此:电池组容量(Ah)=60000*0.8*3/(348*0.75*0.93)≈593Ah所以每台UPS配置3组200AH/12V蓄电池可达到单机后备180分钟系统后备180分中。
1.1.3.UPS输入输出线径及空开要求输入输出及电池连接线线径(单位mm):输入输出配电柜空开安装要求:由于UPS内部采用大功率EMI滤波器件加强设备的EMC特牲,所以配电箱里UPS的输入输出空气开关不宜选用漏电流保护型的。
UPS的输入零线不能经过空气开关。
空开容量:配电箱做好后应保证输入零地电压小于5Vac。
1.1.4.环境要求UPS最好安装在无导电杂质的装腔作势有空调的独立房间内,由于可能性的噪音干扰建议不要安装在办公室内,操作环境必须清洁,干燥并受到保护,空气须无灰尘和腐蚀性气体,系统运行时还必须保持空气流通,安装UPS的环境必须符合以下条件:运行相对湿度:0—95%,不结露运行温度:0摄氏度-----40摄氏度1.1.5.产品性能描述UPS性能指标介绍:1)超强的并联能力:可以任意多机并联,无需设定并机数目,理论上不存在并联数目的上限,任意并联扩容或N+1冗余并联,提高了电源系统的可靠性,为中国的大功率UPS用户提供了一种理想的、可并联的UPS产品。
2)高精度的负载分配能力:精确的数字化算法实现电压、频率和相位等参数的静态、动态特性快速调整,确保并联系统负载分配的精确性。
3)先进的无主从自适应控制技术:无主从自适应控制技术保证UPS的主要参数偏离中心值时,仍能可靠并联,使得并联UPS单元无需严格匹配,保证了并联工程实现的简易性和并联系统长时间运行出现参数变化时并联的可靠性;同时自适应控制技术还将保证不同功率的UPS直接并联时,按UPS容量比例分配负载。
一种基于DSPIC全数字控制的逆变电源
提 高电源 的功率 因数 、降低谐波污染 ;
耗、 承受短路 电路能力 以及通态压降等有明显的影响,直接 影
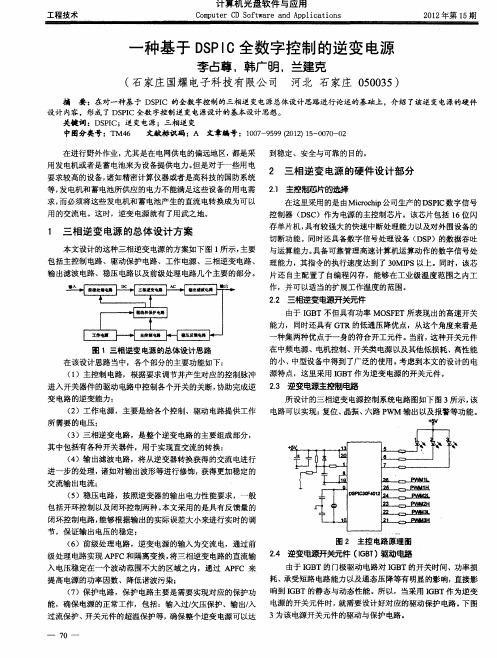
GB G T作 为逆变 ( )保护 电路 ,保护 电路主要是需要实现对应 的保护功 响到 I T的静 态与动态性能 。所 以,当采用 I B 7 就需要设计好对应的驱动保护 电路。 图 下 能,确保 电源 的正常 工作 ,包括 :输入过/ 欠压保护、输 出/ 入 电源 的开关元件 时, 过流保护 、 关元件 的超温保护等 , 开 确保整个逆变 电源可 以达 3为该 电源开关元件 的驱动与保护 电路 。
等 , 电机和蓄 电池所供应的 电力不能满足 这些设备的用 电需 21 主控制芯片的选择 发 . 求, 而必须将这些发 电机和蓄 电池产生的直流电转换成 为可 以
用 的交 流电。这 时,逆变 电源就有 了用武之地 。 在这里采用 的是 由Mi ohp公司生产 的DS I c ci r PC数字信号 控制器 ( C)作为 电源 的主控制芯片 。该芯片包括 1 DS 6位 闪
‘。。— —
7 — 0 。 —
计 算机 光 盘软 件 与应 用
21 第 1 0 2年 5期 C m u e DS fw r n p l c t o s o p t rC o t a ea dA p ia in 工 程 技 术
l
=
主要部分 。下 图 7 、8分别为芯片与开关元件 驱动电源 。
T/ t Y  ̄
l
4 A ¥
T 1 .
入 电压稳定在 一个 波动范围不大的区域 之内,通 过 A F 来 PC
图 2 主控 电路原理 图
. 4 1 T 驱动 电路 G 级 处理 电路 实现 A F P C和 隔离变换 , 将三相逆变 电路 的直流输 2 逆变 电源开关元件 ( B )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
累加器
数字III型(3p3z)补偿器的线性差分方程
© 2014 Microchip Technology Incorporated.版权所有。
C15L12 APS
幻灯片 9
课程安排
回顾数字补偿器 用于优化电源转换器的非线性控制方法 功率因数校正改善 高级8位电源示例
© 2014 Microchip Technology Incorporated.版权所有。
控制器:分为模拟或数字两类,也称为补偿器
系统:受控制的系统或执行器(SMPS、电机和执行器等)
输出:在本课程中以及对于SMPS来说,输出可以是电压或电流
反馈:输出信号的测量值
C15L12 APS
Output
幻灯片 4
模拟实现
Reference
+
Error
-
Compensator Hc
System Plant Hsys
C15L12 APS
幻灯片 11
数字补偿器 框图
数字域的控制原理与模拟域完全相同 每个补偿器都可以替换为其等效的数字补偿器1
(II型 → 2p2z,III型 → 3p3z,IV型 → 4p4z等) 为了能够实时地优化/控制系统,需要额外的“手轮”
全数字补偿框图 (电压和平均电流模式)
反馈输入
ADC
S/H
Reference
反馈
Rf1 Rf2
© 2014 Microchip Technology Incorporated.版权所有。
Microchip dsPIC® DSC
C15L12 APS
幻灯片 6
III型补偿器 (原极点 + 两个零点/极点对)
步骤1:确定系统传递函数
f p2 = f ESR
Output
Feedback Gain HFB
执行器
VIN
Q1
L
PWM Gate Driver
D1
Co
+ -
Comparator
C2 C1 R2
+
C3 R3 R1
Reference
© 2014 Microchip Technology Incorporated.版权所有。
模拟III型补偿器 + PWM
MAC——指令
变量
X-RAM e(n) e(n-1) e(n-2) e(n-3) u(n-1) u(n-2) u(n-3)
指令:7
来自RAM
误差历史 记录
控制器 历史记录
u(n) =
A1 u(n-1) + A2 u(n-2) + A3 u(n-3) + B0 e(n) + B1 e(n-1) + B2 e(n-2) + B3 e(n-3)
C15L12 APS
幻灯片 19
补偿滤波器特性建模
使用小信号模型对系统响应进行建模
必须微调系统以对输入电压和负载瞬变以及注入 和辐射干扰进行补偿
REF
Σ
负载和输入瞬变
G(s)
执行器
Gcl
(s)
=
1
+
G(s) G(s)H
(
s)
输出
© 2014 Microchip Technology Incorporated.版权所有。
9V时: -18010110260VV时时::
20V时:
65° → 72° 52° → 60° 43° → 53° 40° → 50°
10000 频率[Hz]
100000
6V#: Phase [°] 6V: Phase [°]
9V#: Phase [°] 9V: Phase [°]
12V#: Phase [°] 12V: Phase [°]
-40
增益-120特性相同 -40
-120
-50
-150
-50
-150
-60 100
1000
10000
频率[Hz]
-180 100000
-60 100
1000
10000
频率[Hz]
-180 100000
© 2014 Microchip Technology Incorporated.版权所有。
C15L12 APS
C15L12 APS
VOUT
反馈
Rf1 Rf2
幻灯片 5
数字实现
Reference
+
Error
-
Compensator Hc
System Plant Hsys
Output
VIN
Q1
Feedback Gain HFB
执行器
L
D1
VOUT
Co
Gate Driver
数字补偿器 + DPWM
DPWM
Digital Compensator
REF
Σ
G(s)
输出
补偿器
H(s)
反馈
输入
输出
© 2014 Microchip Technology Incorporated.版权所有。
C15L12 APS
幻灯片 21
一切均始于执行器 (电源滤波器)的执 行器增益特性
增益和相位的开环图 描绘了随频率变化的 滤波器特性曲线
必须按照执行器的开 环特性“调节”补偿 器,以在安全稳定的 工作区内实现最佳性 能
60
180
ADC触发信号(50%关断时间处)
- VIN = 6.0 ...20V DC/IOUT = 4,000 mA -
60
180
50
150
50
150
40
120
40
120
30
90
30
90
20
60
20
60
10
30
10
30
0
0
0
0
-10
-30
-10
-30
-20
-60
-20
-60
-30
-90
-30
-90
幻灯片 12
数字补偿器与模拟补偿器
由于控制系统基于采用附加零阶保持器(ZOH) 的采样数据,因此必须考虑随之引入的新影响并 加以补偿。这通常在软件中实现。
添加ZOH所带来的直接后果是:数字补偿器会对 相位裕量产生负面影响
反馈输入
REF
ADC
–
nPmZ补偿器
控制输出
自适应和预测性算法
© 2014 Microchip Technology Incorporated.版权所有。
Zf
=1 s ⋅C2
(R2
+
s
1 ⋅ C1
)
Zi
= R1
1 s ⋅C2
步骤2:确定系统极点和零点
Gain (dB)
f z1 = 0.6 ⋅ fLC
f p0
90
Phase (o)
90
© 2014 Microchip Technology Incorporated.版权所有。
C15L12 APS
幻灯片 7
f z2 = f LC
f p3 = 0.5 ⋅ fsw
(s + 1 )⋅(s +
1
)
H (s) = Z f Zi
=
R1 + R3 R1 ⋅ R3 ⋅ C2
⋅
R2 s ⋅(s +
⋅ C1 C1
+
C2
(R1 + R3 ) ⋅ C3 )⋅(s + 1 )
R2 ⋅ C1 ⋅ C2
R3 ⋅ C3
反馈阻抗
输入阻抗
C15L12 APS
利用高级控制方法实现全数字控制 并设计混合控制回路
C15L12 APS
幻灯片 1
课程安排
回顾数字补偿器 用于优化电源转换器的非线性控制方法 功率因数校正改善 高级8位电源示例
C15L12 APS
幻灯片 2
课程安排
回顾数字补偿器 用于优化电源转换器的非线性控制方法 功率因数校正改善 高级8位电源示例
幻灯片 16
频域比较
增益[dB]
基于ADC触发信号的相位优化
- 同步降压转换器/VIN = 6.0 ...20V DC/VOUT = 3.3V/IOUT = 4,000 mA -
180
150
扩大了频率范围
120
90
60
相位改善:
30
-180°相位时的交叉频率从
约33 kHz升至51 kHz
0
增益裕量增大:
PWM信号与反馈纹波之间
存在相移
CIN
R1
R2
L
Q1
Q2
输出
COUT
Ra
Rb
信号发生器
PWM 发生器
时钟
死区发生器
PWMxH PWMxL
t1 t2
控制环
nPmZ 补偿器
REF
ANx
–ALeabharlann C© 2014 Microchip Technology Incorporated.版权所有。
C15L12 APS
C15L12 APS
幻灯片 14
数字控制环时序示例
“传统”实现根据大约50%导通时间处的ADC触发信号来调用ADC中断服务程 序(ISR)内的控制环,这通常会在变化检测与响应之间引入一个开关周期的
延时(ZOH),进而造成∆Φ的相位裕量损失。
∆Φ = −360°× f X f sample
时间t