课时跟踪检测(四) 人与机械
人体工程学教案01-第1章人机简介-形成和发展-WX

第一章人体工程学概述时间:2课时对象:14及(专)艺术设计授课内容:本课程共分为四个大的部分,即人体工程学概述、人体工程学基础知识、人体工程学与室内设计、人体工程学与室外环境设施设计。
通过本课程的学习,使学生具备高素质劳动者和高级应用型人才所必需的人体工程方面的基本知识和基本技能,培养学生把人-机-环境系统作为一个统一的整体来研究,以创造最适合于人操作的机械设备和作业环境,使人-机-环境系统相协调,从而获得系统的最高综合效率能为主要目标,同时,要体现以“人为核心“的设计价值观,为今后的功能性设计打下一个好的基础。
人体工程学的教学应立足于促进学生能力和认识的提高,为其今后的专业发展奠定科学的方法论基础。
人体工程学是以生理学、心理学、人体测量等学科为基础,研究如何使人-机-环境系统的设计符合人的身体结构和生理心理特点,以实现人、机、环境之间的最佳匹配,使处于不同条件下的人能有效地、安全地、健康和舒适地进行工作与生活的科学。
为设计中考虑“人的因素”提供人体尺度参数,为设计中“物”的功能合理性提供科学依据,为设计中考虑“环境因素”提供设计准则,为进行人-机-环境系统提供理论依据。
教学策略:先播放一个经典的人机工程学的小动画,(时间2分钟)引导学生讨论动画中纠正了日常生活中哪些不符合人机工程学的事情,还有哪些?人体工程学简介人体工程学(Ergonomics)起源于欧洲,形成和发展于美国,是全球进入工业文明背景下产生的一门新兴、多学科交叉的综合技术学科。
在1842年,英国基本实现工业化,然而英国工业区地劳动工人平均寿命比贵族缩短了一半。
导致这样的原因什么?人和机器的关系不合理。
在国外由于研究方向的不同,人体工程学产生了很多不同或意义相近的名称。
在我国,对其称呼主要有两种:人体工程学和人机工程学。
前者多用于室内外环境设计、建筑设计、家具设计等领域,后者多用于机械工程、工业设计等领域。
随着人体工程学的不断发展,给工业大生产带来了巨大的贡献的同时,也面临着挑战。
沪科版物理八年级下册第十章《机械与人》教学教案
10.1 科学探究:杠杆的平衡条件第1课时认识杠杆和杠杆的平衡条件教学目标【知识与能力】1.知道什么是杠杆,能从常见工具中辨认出杠杆。
2.能够辨认出支点,动力、阻力,会确定动力臂、阻力臂。
3.通过观察与实验,探究并理解杠杆的平衡条件,并能进行简单计算。
教学重难点【教学重点】杠杆平衡条件,经历探究杠杆平衡条件的过程并运用它分析有关问题。
【教学难点】力臂的概念和画法。
课前准备羊角锤、铁架台、钩码、细绳、等分刻度的均质木尺、多媒体课件等。
教学过程一、新课引入多媒体展示:如图所示,古埃及人建造金字塔时利用简单机械搬动巨大石块,我国古代利用桔槔在井上汲水,在现代建筑工地上,人们利用挖土机、起重机、吊车、钳子等工具进行劳动,让学生找出它们的共同特点。
通过这些实例,有效地引起学生的注意,从而导入新课。
二、新课教学探究点一杠杆观察下图中物体的工作特点,请学生回答。
学生交流讨论得出:(1)硬;(2)在力的作用下绕某一点转动。
演示:用长木板绕固定点转动撬一重物。
说明物体只要是硬的就行,跟形状无关。
同时边说边板书课题。
1.定义:一根硬棒在力的作用下如果能绕固定点转动,这根硬棒就叫杠杆。
让学生再举一些杠杆的实例(如活塞式抽水机、跷跷板)以巩固对定义的理解。
2.杠杆的五要素。
支点:杠杆绕着转动的点,用字母O表示。
动力:使杠杆转动的力,用字母F1表示。
阻力:阻碍杠杆转动的力,用字母F2表示。
那么要产生同样的效果,施加力的大小、方向是否一样呢?让学生按下图分别操作。
(1)分别按图甲三个位置沿图示方向向下施力使杠杆静止。
提问:三次施加力的大小是否一样?答:不一样(大小关系能回答出来)。
这说明要使杠杆保持这种状态,力的大小跟什么有关?学生可能会回答跟作用点和支点的远近有关,且距离越大,力越大。
(2)老师不加解释,再让学生按图乙所示施加力使杠杆保持静止,学生会发现虽然作用点相同,即作用点和支点的远近相等但力的大小却不同,且F1>F2,问:那跟什么有关呢?学生无法解释(必然产生强烈的求知欲),这时出示课上练习纸让学生在图上画出过支点O作沿F1、F2方向的直线的垂线段(这一点有些学生的准备知识可能不足,老师可先观察,若学生画得很好,老师就略画一下,若不行,老师就得详细示范给学生看)并标上l1、l2。
人教版数学高二-人教A版选修4-4课时跟踪检测(十三) 渐开线与摆线
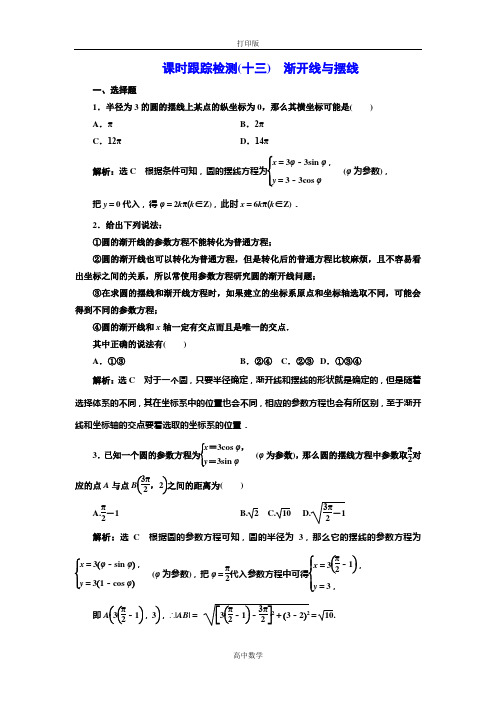
课时跟踪检测(十三) 渐开线与摆线一、选择题1.半径为3的圆的摆线上某点的纵坐标为0,那么其横坐标可能是( )A .πB .2πC .12πD .14π解析:选C 根据条件可知,圆的摆线方程为⎩⎪⎨⎪⎧x =3φ-3sin φ,y =3-3cos φ(φ为参数), 把y =0代入,得φ=2k π(k ∈Z),此时x =6k π(k ∈Z).2.给出下列说法:①圆的渐开线的参数方程不能转化为普通方程;②圆的渐开线也可以转化为普通方程,但是转化后的普通方程比较麻烦,且不容易看出坐标之间的关系,所以常使用参数方程研究圆的渐开线问题;③在求圆的摆线和渐开线方程时,如果建立的坐标系原点和坐标轴选取不同,可能会得到不同的参数方程;④圆的渐开线和x 轴一定有交点而且是唯一的交点.其中正确的说法有( )A .①③B .②④C .②③D .①③④ 解析:选C 对于一个圆,只要半径确定,渐开线和摆线的形状就是确定的,但是随着选择体系的不同,其在坐标系中的位置也会不同,相应的参数方程也会有所区别,至于渐开线和坐标轴的交点要看选取的坐标系的位置.3.已知一个圆的参数方程为⎩⎪⎨⎪⎧x =3cos φ,y =3sin φ(φ为参数),那么圆的摆线方程中参数取π2对应的点A 与点B ⎝⎛⎭⎫3π2,2之间的距离为( )A.π2-1B. 2C.10D.3π2-1 解析:选C 根据圆的参数方程可知,圆的半径为3,那么它的摆线的参数方程为⎩⎪⎨⎪⎧ x =3(φ-sin φ),y =3(1-cos φ)(φ为参数),把φ=π2代入参数方程中可得⎩⎪⎨⎪⎧x =3⎝⎛⎭⎫π2-1,y =3, 即A ⎝⎛⎭⎫3⎝⎛⎭⎫π2-1,3,∴|AB |= ⎣⎡⎦⎤3⎝⎛⎭⎫π2-1-3π22+(3-2)2=10.4.如图ABCD 是边长为1的正方形,曲线AEFGH …叫做“正方形的渐开线”,其中AE ,EF ,FG ,GH 的圆心依次按B ,C ,D ,A 循环,它们依次相连接,则曲线AEFGH 的长是( )A .3πB .4πC .5πD .6π解析:选C 根据渐开线的定义可知,AE 是半径为1的14圆周长,长度为π2,继续旋转可得EF 是半径为2的14圆周长,长度为π;FG 是半径为3的14圆周长,长度为3π2;GH 是半径为4的14圆周长,长度为2π.所以曲线AEFGH 的长是5π. 二、填空题5.我们知道关于直线y =x 对称的两个函数互为反函数,则圆的摆线⎩⎪⎨⎪⎧x =r (φ-sin φ),y =r (1-cos φ)(φ为参数)关于直线y =x 对称的曲线的参数方程为________.解析:关于直线y =x 对称的函数互为反函数,而求反函数的过程主要体现了x 与y 的互换,所以要写出摆线方程关于y =x 对称的曲线方程,只需把其中的x ,y 互换.答案:⎩⎪⎨⎪⎧ x =r (1-cos φ),y =r (φ-sin φ)(φ为参数) 6.已知圆的渐开线的参数方程是⎩⎪⎨⎪⎧x =cos φ+φsin φ,y =sin φ-φcos φ(φ为参数),则此渐开线对应的基圆的直径是__________,当参数φ=π4时对应的曲线上的点的坐标为________. 解析:圆的渐开线的参数方程由圆的半径唯一确定,从方程不难看出基圆的半径为1,故直径为2.求当φ=π4时对应的坐标只需把φ=π4代入曲线的参数方程,得x =22+2π8,y =22-2π8,由此可得对应的坐标为⎝⎛⎭⎫22+2π8,22-2π8. 答案:2 ⎝⎛⎭⎫22+2π8,22-2π8 7.已知一个圆的摆线过点(1,0),则摆线的参数方程为______________. 解析:圆的摆线的参数方程为⎩⎪⎨⎪⎧ x =r (φ-sin φ),y =r (1-cos φ)(φ为参数),令r (1-cos φ)=0,得φ=2k π(k ∈Z),代入x =r (φ-sin φ),得x =r (2k π-sin 2k π)(k ∈Z),又∵过(1,0),∴r (2k π-sin 2k π)=1(k ∈Z),∴r =12k π(k ∈Z).又∵r >0,∴k ∈N *.答案:⎩⎨⎧x =12k π(φ-sin φ),y =12k π(1-cos φ)(φ为参数,k ∈N *)三、解答题 8.有一个半径是2a 的轮子沿着直线轨道滚动,在轮辐上有一点M ,与轮子中心的距离是a ,求点M 的轨迹方程.解:设轮子中心为O ,则OM =a .点M 的轨迹即是以O 为圆心,a 为半径的基圆的摆线.由参数方程知点M 的轨迹方程为⎩⎪⎨⎪⎧ x =a (φ-sin φ),y =a (1-cos φ)(φ为参数). 9.已知一个圆的摆线方程是⎩⎪⎨⎪⎧x =4φ-4sin φ,y =4-4cos φ(φ为参数),求该圆的面积和对应的圆的渐开线的参数方程.解:首先根据摆线的参数方程可知圆的半径为4,所以面积是16π,该圆对应的渐开线参数方程是⎩⎪⎨⎪⎧x =4cos φ+4φsin φ,y =4sin φ-4φcos φ(φ为参数).10.已知一个圆的摆线过一定点(2,0),请写出该圆的半径最大时该摆线的参数方程以及对应的圆的渐开线的参数方程.解:令y =0,可得a (1-cos φ)=0,由于a >0,即得cos φ=1,所以φ=2k π(k ∈Z).代入x =a (φ-sin φ),得x =a (2k π-sin 2k π)(k ∈Z).又因为x =2,所以a (2k π-sin 2k π)=2(k ∈Z),即得a =1k π(k ∈Z).又由实际可知a >0,所以a =1k π(k ∈N *). 易知,当k =1时,a 取最大值为1π. 代入即可得圆的摆线的参数方程为⎩⎨⎧ x =1π(φ-sin φ),y =1π(1-cos φ)(φ为参数).圆的渐开线的参数方程为⎩⎨⎧ x =1π(cos φ+φsin φ),y =1π(sin φ-φcos φ)(φ为参数).。
八年级物理机械与人章节练习
第九章 机械与人第一节 科学探究:杠杆的平衡条件一.填空题:1.图1是一件名为“龙虾网与鱼尾巴”的活动雕塑作品,O是它的支点。
作者把他艺术天赋与物理学中的____平衡原理结合起来,创造了一种全新的艺术形式,给人以美感。
你在生活中也会见到利用这一原理的例子,请举一例。
2.某人分别用图2所示的甲、乙两种方法挑着同一个物体赶路,甲图中肩受到的压力 乙图中肩受到的压力;甲图中手施加的动力 乙图中手施加的动力(填“大于”、“小于”或“等于”)。
3.你仔细观察如图3所示的漫画,小猴和小兔分得萝卜重的是___。
理由是____________________。
二.选择题:4.如图所示的简单机械,在使用中属于费力杠杆的是 ( )图2图16.图6所示,人的前臂可视为杠杆,当曲肘将茶杯向上举起时,下列说法中正确的是( ) A.前臂是省力杠杆 B.前臂是费力杠杆 C.前臂不是杠杆 D.无法确定7.图7所示是一个指甲刀的示意图;它由三个杠杆ABC 、OBD 和OED 组成,用指甲刀剪指甲时,下面说法正确的是( ) A.三个杠杆都是省力杠杆; B.三个杠杆都是费力杠杆;C.ABC 是省力杠杆,OBD 、OED 是费力杠杆;D.ABC 是费力杠杆,OBD 、OED 是省力杠杆。
三.作图题:8.图8是用扳手转动螺母的示意图(螺母的中心为支点O),请在图中画出动力的力臂。
9.图9所示,杠杆AO 在力F 1、F 2的作用下处于静止状态L 2是力F 2的力臂,在图中画出力F 2。
四.实验题:10.图10 所示是探究杆杠平衡条件的实验装置。
⑴.两端螺母的作用是 ; 若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节;也可将杠杆左端的平衡螺母向 调节。
此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母? 。
⑵.他得到的两组数据如下表所示:5.如图所示杠杆,O是支点,杠杆质量不计,在A、B两端分别挂上质量不等的甲、乙两物体(甲的质量大于乙),此时杠杆平衡,下列情况中能使杠杆重新平衡的是( )A.将甲乙两物体向支点移动相同的距离;B.将甲乙两物体远离支点移动相同的距离; C.在甲乙两端分别挂上质量相等的物体;D.在甲乙两端分别挂上与甲乙等质量相等的物体. 图6图8 图9 图10这两组数据中,第 次实验的数据肯定有错误。
《基于单目视觉的艾灸机器人定位、识别与跟踪研究》

《基于单目视觉的艾灸机器人定位、识别与跟踪研究》一、引言随着人工智能和机器人技术的不断发展,艾灸作为一种传统的中医疗法,正逐渐与现代科技相结合,为人们的健康保健带来新的可能性。
艾灸机器人的出现,不仅提高了艾灸治疗的效率,还为患者提供了更为便捷和舒适的体验。
本文旨在研究基于单目视觉的艾灸机器人定位、识别与跟踪技术,以提高艾灸机器人的智能化水平。
二、单目视觉技术的概述单目视觉技术是指利用单个摄像头的图像信息进行三维世界的感知和理解。
其核心技术包括图像采集、图像处理和模式识别等。
在艾灸机器人的应用中,单目视觉技术可用于实现对患者的定位、识别和跟踪,从而为艾灸机器人提供准确的导航和操作依据。
三、艾灸机器人的定位技术艾灸机器人的定位技术是利用单目视觉技术,通过图像处理算法对患者的位置进行实时检测和计算。
本文提出了一种基于特征点匹配的定位方法,通过在患者身体上设置特定的标记点,利用摄像头捕捉这些标记点的位置信息,从而实现患者的精确定位。
该方法具有较高的定位精度和稳定性,适用于各种复杂环境下的艾灸治疗。
四、艾灸机器人的识别技术艾灸机器人的识别技术主要是通过对患者身体的图像信息进行提取和分析,实现对患者身体部位的准确识别。
本文采用了一种基于深度学习的图像识别方法,通过训练神经网络模型,使机器人能够自动识别出患者的身体部位和穴位。
该方法具有较高的识别准确率和速度,为艾灸机器人的精准操作提供了有力支持。
五、艾灸机器人的跟踪技术艾灸机器人的跟踪技术是通过对患者身体运动的实时监测和分析,实现对患者的连续跟踪和定位。
本文提出了一种基于光流法的跟踪方法,通过分析摄像头捕捉到的图像序列中的光流信息,实现对患者身体运动的实时监测和跟踪。
该方法具有较好的鲁棒性和实时性,适用于各种动态环境下的艾灸治疗。
六、实验与结果分析为了验证本文提出的基于单目视觉的艾灸机器人定位、识别与跟踪技术的有效性,我们进行了实验研究。
实验结果表明,本文提出的定位、识别与跟踪方法具有较高的准确性和稳定性,能够为艾灸机器人提供准确的导航和操作依据。
精品试题沪科版八年级物理第十章 机械与人达标测试试卷(含答案详解)

沪科版八年级物理第十章机械与人达标测试考试时间:90分钟;命题人:物理教研组考生注意:1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)一、单选题(10小题,每小题3分,共计30分)1、在某高处将两块质量相等的石块A、B分别以两种方式落向地面:石块A自由落下到地面;石块B 被用水平作用力水平抛出后,呈抛物线下落到地面。
在石块落地的过程中,石块重力分别做的功率为P A和P B,则比较两者大小关系正确的是()A.P A>P B B.P A=P BC.P A<P B D.不好判断2、若物体受到平衡力的作用,那么()A.物体一定保持静止B.物体的重力势能一定保持不变C.物体的动能一定增大D.物体的机械能可能发生变化3、用功率恒为160W的拉力,使质量为5kg的物体以4m/s的速度沿30°的斜坡匀速拉到坡顶,已知斜坡长60m,则下列说法错误的是()A.物体从斜坡底端到达坡顶的时间是15sB.物体上坡时的牵引力是40NC.物体上坡时受到的摩擦力为15ND.斜面的机械效率是50%4、下列工具中,在使用时属于费力杠杆的是()A.天平B.理发剪刀C.钢丝钳D.瓶盖起子5、如图所示,小明先后用F1、F2、F3的力匀速拉起重物,若摩擦不计,则()A.F1大于F2B.F1大于F3C.F1等于F2D.F2小于F36、如图所示,在竖直平面内用轻质细线悬挂一个小球,将小球拉至A点使细线处于拉直状态,由静止开始释放小球,不计空气阻力,小球可在A、F、B三点间来回摆动,A和B是最高点,F是最低点。
下列说法正确的是()A.小球到达最低点F时撤去一切外力,由于惯性,它将保持原来的圆周运动B.当小球运动到最低点F处,细线对它的拉力与它受到的重力平衡C.当小球到达最高点A时撤去一切外力,它将做匀速直线运动D.当小球摆动到B点时,细线恰好断开,则小球将沿BE方向运动7、如图所示,有一质量不计的长木板,左端装有与墙相连的轴在它的左端放一重为G的物块,并用一竖直向上的力F拉着右端。
难点详解沪科版八年级物理第十章 机械与人定向攻克试题(含答案及详细解析)
沪科版八年级物理第十章机械与人定向攻克考试时间:90分钟;命题人:物理教研组考生注意:1、本卷分第I卷(选择题)和第Ⅱ卷(非选择题)两部分,满分100分,考试时间90分钟2、答卷前,考生务必用0.5毫米黑色签字笔将自己的姓名、班级填写在试卷规定位置上3、答案必须写在试卷各个题目指定区域内相应的位置,如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带,不按以上要求作答的答案无效。
第I卷(选择题 30分)一、单选题(10小题,每小题3分,共计30分)1、下列关于热机说法正确的是()A.热机是利用热量做功的机械B.吊车上使用的滑轮组是一种热机C.热机是将内能转化为机械能的机械D.随着技术的进步,热机的效率能达到100%2、下列关于动能的说法,正确的是()A.运动的物体具有的能,叫动能B.物体由于运动具有的能,叫动能C.速度大的物体甲具有的动能一定大于速度小的物体乙具有的动能D.运动物体质量越大,所具有的动能一定越多3、如图所示用三个力沿不同的方向拉绳子,则()A.F1最大B.F2最大C.F3最大D.一样大4、如图所示,使用时属于费力杠杆的是()A.镊子B.瓶盖启子C.钳子D.托盘天平5、羽毛球比赛中,空中飞行的羽毛球先后经过A、B两点时的重力势能相等,相比A点,羽毛球在B 点时()A.机械能相等,动能较大B.机械能较小,动能较小C.机械能较小,动能较大D.机械能较大,动能较小6、小健学习使用下列简单机械后做出以下总结,你认为他的总结中叙述错误的是()A.垂直于道钉撬的把手向下压时,人的用力最省力B.用斜面向上搬物体时,既可以省力,又可以节省做功C.使用镊子时,杠杆的支点在动力作用点与阻力作用点的外侧,属于费力杠杆D.图中的小人若沿F2方向用力,所用的力与沿F1方向用力的大小基本相同7、“给我一个支点,我就能撬动整个地球”,下列生产和生活中的杠杆与阿基米德设想的杠杆属于同一类型的是()A.食品夹B.托盘天平C.钓鱼竿D.修树剪8、如图所示,小车从斜面某一高度由静止释放,自由下滑,然后在水平面上运动(忽略空气阻力)下列说法错误的是()A.小车从斜面上由静止释放后,小车的动能先变大后变小B.小车在水平面上运动时,小车对水平面的压力和水平面对小车的支持力是一对平衡力C.小车从斜面下滑到水平面后还能继续运动,是因为小车具有惯性D.若水平面光滑且足够长,则小车在水平面上运动时的机械能将保持不变9、下列各个过程中,物体的重力势能转化为动能的有()A.乒乓球触地后向上弹起过程中B.车沿斜面向上匀速行驶过程中C.斜向上抛出的小石子在上升过程中D.水坝上流下来的水冲击水轮机转动10、在图中,物体A的重力为G,在拉力F的作用下,物体沿水平桌面做匀速直线运动,已知物体受到的摩擦力为f,则人对绳的拉力F的大小等于()A.0.5G B.2G C.0.5f D.2f第Ⅱ卷(非选择题 70分)二、填空题(5小题,每小题2分,共计10分)1、如图所示,杠杆在竖直向下拉力F的作用下将一物体缓慢匀速提升,表是提升物体时采集到的信息:若不计杠杆自重和摩擦,拉力应为______N;若实际拉力F为90N,则杠杆的机械效率为______。
人与地理环境 课时跟踪检测
(时间30分钟满分100分)一、选择题(每小题5分,共60分)下图是人类不同发展阶段就业结构变化图。
读图,回答1~2题。
1.符合人类社会发展先后顺序的是()A.①④②③B.①②③④C.①③②④D.②①③④解析:①时期劳动力主要从事狩猎采集,出现在人类社会的早期;④时期从事种植畜牧业的劳动力比重不断增大,表示农业文明时期;②时期从事工业活动的就业比重较大,表示工业文明时期;③时期知识劳动所占比重大,表示后工业化阶段。
答案:A2.②阶段人地关系的特点表现为()A.人类与地理环境建立平等友好、互惠共生、和谐互进的伙伴关系B.人类认识自然、改造自然的能力很低,只能被动地适应环境C.人类对自然地理环境的依赖性很大,地理环境对人类社会发展的影响也很大D.人类单纯地把地理环境看成是人类活动的场所和开发的对象解析:②阶段表示工业文明时期,该阶段人类单纯地把地理环境看成是人类活动的场所和开发的对象,人地矛盾尖锐,环境问题较为严重。
答案:D如图为自然资源与人类的关系图。
读图,回答3~4题。
3.图示虚线方框展现了人类与自然资源之间存在的激烈矛盾,其外在的表现主要是()A.资源的破坏与短缺B.促进经济迅猛发展C.新材料应运而生D.资源利用范围越来越广4.人类对自然资源无节制地开发利用主要是因为()A.自然资源都属于可再生资源B.人类可以无限开发利用自然资源C.人口剧增和错误的认识D.人类利用自然资源种类不断增多解析:第3题,现在人类面临的资源问题主要是人类对资源的过度利用和不合理利用导致的资源短缺。
第4题,人类对资源的无节制开发,一方面是因为人口增加,对资源的需求量增大;另一方面是由于人口素质低,导致对资源的过度利用和不合理利用。
答案:3.A 4.C下图为人类各发展阶段的人均每日能源消耗(包括直接消耗和间接消耗)统计图。
读图完成5~6题。
5.关于人类各发展阶段能源消耗的叙述,正确的是()A.工业革命前人类消耗的能源主要是矿物能源B.工业革命后人类消耗的能源主要是生物能源C.人类在各发展阶段都消耗一种类型的能源D.随着社会生产力水平的提高,人均能源消耗不断增长解析:工业革命前人类消耗的能源主要是生物能源;工业革命后人类消耗的能源主要是矿物能源;随着社会生产力水平的提高,人类消耗的能源类型越来越丰富,能源消耗总量和人均能源消耗都会增长。
高考物理复习高三一轮复习:课时跟踪检测20机械能守恒定律
高考物理复习课时跟踪检测(二十) 机械能守恒定律高考常考题型:选择题+计算题1. (2012·南京模拟)自由下落的物体,其动能与位移的关系如图1所示。
则图中直线的斜率表示该物体的( )A.质量 B.机械能C.重力大小D.重力加速度图12.如图2所示,竖立在水平面上的轻弹簧,下端固定,将一个金属球放在弹簧顶端(球与弹簧不连接),用力向下压球,使弹簧被压缩,并用细线把小球和地面拴牢(图甲)。
烧断细线后,发现球被弹起且脱离弹簧后还能继续向上运动(图乙)。
那么该球从细线被烧断到刚脱离弹簧的运动过程中,下列说法正确的是( )图2A.弹簧的弹性势能先减小后增大B.球刚脱离弹簧时动能最大C.球在最低点所受的弹力等于重力D.在某一阶段内,小球的动能减小而小球的机械能增加3.如图3所示,斜劈劈尖顶着竖直墙壁静止于水平面上,现将一小球从图示位置静止释放,不计一切摩擦,则在小球从释放到落至地面的过程中,下列说法正确的是( )A.斜劈对小球的弹力不做功B.斜劈与小球组成的系统机械能守恒图3C.斜劈的机械能守恒D.小球机械能的减小量等于斜劈动能的增大量4.如图4所示,在高1.5 m的光滑平台上有一个质量为2 kg的小球被一细线拴在墙上,球与墙之间有一根被压缩的轻质弹簧。
当烧断细线时,小球被弹出,小球落地时的速度方向与水平方向成60°角,则弹簧被压缩时具有的弹性势能为(g=10 m/s2)( )图4A.10 J B.15 JC.20 J D.25 J5.打开水龙头,水顺流而下,仔细观察将会发现连续的水流柱的直径在流下的过程中,是逐渐减小的(即上粗下细),设水龙头出口处半径为1 cm,安装在离接水盆75 cm高处,如果测得水在出口处的速度大小为1 m/s,g=10 m/s2,不考虑空气阻力,则水流柱落到盆中时的半径为( )A.1 cm B.0.75 cmC.0.5 cm D.0.25 cm6.如图5所示,质量、初速度大小都相同的A、B、C三个小球,在同一水平面上,A球竖直上抛,B球以倾斜角θ斜向上抛,空气阻力不计,C球沿倾角为θ的光滑斜面上滑,它们上升的最大高度分别为hA、hB、hC,则( )图5A.hA=hB=hC B.hA=hB<hCC.hA=hB>hC D.hA=hC>hB7.(2012·福建高考)如图6所示,表面光滑的固定斜面顶端安装一定滑轮,小物块A、B用轻绳连接并跨过滑轮(不计滑轮的质量和摩擦)。
2020高中语文课时跟踪检测(四)百丈山记(含解析)粤教版选修《唐宋散文选读》
课时追踪检测(四)百丈山记( 时间: 40 分钟,分值:55 分)一、基础稳固(22分 )1.对以下句子中加点词的解说,不正确的一项为哪一项(3分 )()A.叠石为磴.,十余级乃得度磴:石台阶B.循磴而东,即得小涧.循:顺着C.阁据其上流.据:拥有D.因各别为小诗以识.其处识:通“志”,记述分析:选C C 项,据:占有,位居。
2.以下各组句子中,加点的词的意义和用法同样的一组是(3分 )()A.十余级乃得度.今其智乃反不可以及.B.村夫凿石容磴以度.C.而作神祠于其东,水旱祷焉.皆好辞而以.赋见称三人行,必有我师焉.D.又以告夫欲往而未能者.吾尝跂而望矣.分析:选C C 项,焉:都为兼词,相当于“于之”“于此”。
A 项,乃:副词,表顺承,才;副词,表事理相悖或事出不测,居然。
B 项,以:连词,表目的,来;介词,表凭借,凭。
D项,而:连词,表转折,却;连词,表修饰,可不译。
3.句式与其余三项不同的一项为哪一项(3分 )()A.而远近诸山出此中者,皆若飞浮来往B.而作神祠于其东,水旱祷焉C.风来两峡间,整天不停D.自池而出,乃为前所谓小涧者分析:选 D D 项,为判断句,“乃为 ( 就是 ) ”为判断句标记。
A 项,为倒装句,“出 ( 于)此中”,“ ( 于 ) 此中” 为状语后置; B 项,为倒装句,“于其东” 为状语后置; C项,为倒装句,“风来 ( 于) 两峡间”,“ ( 于) 两峡间”为状语后置。
4.以下对文章内容的归纳和剖析,不正确的一项为哪一项(3 分 )()A.文章直截了当,从“山之胜盖自此始”写起,到“山之可观者至是则亦穷矣”止,起伏跌荡,波折感人,首尾响应,构造紧凑。
B.文章第二段以“涧”为中心,表达踏石蹬、过涧水、入庙门而至西阁,主要描绘西阁环境的优美和夜宿听泉的感觉。
C.第三段由石台引出,主要描绘瀑布、夕照与云海,叙次分明,铺设适当,要点突出,令人着迷。
D.这篇游记,没有把笔墨花在记述出游的时间、行程等上边,而是着力于描绘百丈山的优美风景,目的就是“以告夫欲往而未能者”,给此后的旅行者以清楚了然的旅行指示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 1 页 共 5 页
课时跟踪检测(四) 人与机械
基础层级——基稳才能楼高
1.(多选)下列关于人与机械的说法中正确的是( )
A.机械只能承担人类可以完成的工作
B.机械能够承担某些人类无法完成的工作
C.机械可以在超过额定功率的状态下长时间工作
D.机械可以在小于额定功率的状态下长时间工作
解析:选BD 机械不但能够承担人类可以完成的工作,也可以承担人类无法完成的一
些工作,故A错、B正确;机械长时间正常工作的条件是小于或等于额定功率,反之则机
械容易损坏,故C错、D正确。
2.(多选)下列几种工具能省力的是( )
解析:选ABC 根据功的原理,任何机械都不能省功,但增加距离可以省力,A、B、
C中工具省力,D中工具费力但省距离。
3.(多选)以下说法中正确的是( )
A.机械效率越高的机械越省力
B.做有用功多的机械,机械效率不一定高
C.总功一定,有用功多的机械效率高
D.额外功在总功中占的比例越小,机械的机械效率就越高
解析:选BCD 机械是否省力与机械效率高低无关,A错误;机械效率的高低取决于
有用功与总功的比值,选项B、C、D正确。
第 2 页 共 5 页
4.关于功率和机械效率,下列说法中正确的是( )
A.功率大,机械效率一定高
B.机械效率低,功率一定小
C.减小额外阻力可以提高机械效率
D.减小有用阻力可以提高机械效率
解析:选C 功率与机械效率是两个不同的物理概念,物理意义不同,没有确定的正反
比关系,故A、B错误;减小额外阻力、增大有用阻力,都可以提高机械效率,故C正确、
D错误。
5.采取下列措施,可以提高机械效率的是( )
A.有用功一定,增大总功
B.总功一定,增大额外功
C.有用功一定,减小额外功
D.额外功一定,减小总功
解析:选C 由η=
W有用W总=W
有用
W
有用+W额外
可知,有用功一定,减小额外功可以提高机械
效率。
6.如图1所示,是工人师傅往高处运送货物的两种方法。物重均为500 N,滑轮重均为
10 N,不计摩擦和绳重,下列说法正确的是( )
图1
A.甲图中的拉力等于乙图中的拉力
B.甲图中的拉力小于乙图中的拉力
第 3 页 共 5 页
C.甲图中的机械效率小于乙图中的机械效率
D.甲图中的机械效率大于乙图中的机械效率
解析:选D 甲图中利用定滑轮拉货物,F1=G货,乙图中利用动滑轮拉货物,F2=
G
轮+G货
2
,所以甲图中拉力大于乙图中拉力,A、B项错误;甲图中人所做总功等于克服货
物重力所做的有用功为理想机械,其机械效率为1,乙图中人所做总功等于克服货物重力所
做的有用功和克服滑轮重力所做的额外功之和,机械效率小于1,C项错误、D项正确。
7.有甲、乙两台机械,功率P甲>P乙,效率η甲<η乙,下列说法正确的是( )
A.在相同的时间内,乙机械做的功多
B.做相同的有用功,甲机械用的时间少
C.甲机械中的摩擦阻力比较大
D.甲机械的输出功率和输入功率之比小于乙机械的输出功率和输入功率之比
解析:选D 根据P=
W
t
和η=W有用W总可知,时间相同时,甲做功W甲=P甲t,乙做功W
乙=P乙t,又P甲>P乙,则W甲>W乙
,甲做功多,A错误;做相同的有用功,甲机械输入
的功应当多,由P甲>P乙,W=Pt,无法求出t甲、t乙谁大,B错误;甲的机械效率低,由
于不知总功大小,也就不能确定哪个机械额外功多;即使总功相同时,甲机械所做的额外功
比较多,机械所做的额外功与很多因素有关,克服摩擦阻力所做的功是额外功,但额外功不
只是克服摩擦力所做的功,C错误;对机械来说:W总=W入,机械输出的功是对物体做的
有用功,由功与功率关系知W总=W入=P入t,W有=P出t。输入功的时间与输出功的时间
相同,则η=P出P入,即机械效率等于机械输出功率与输入功率的比值,D正确。
8.一水电站,水流的落差为20 m,水流冲击水轮发电机后,水流能20%转化为电能,
若发电机的功率为200 kW,则水流的功率为 ________kW,每分钟流下的水量是
________kg。(g取10 m/s2)
解析:设水流的功率为P,则:P·20%=200 kW,故P=103 kW。设每分钟流下的水
量为m,有mght=P,即m×10×2060=10
3×103 W,m=3×105
kg。
答案:103 3×105
能力层级——跳跳摘到桃子
第 4 页 共 5 页
9.在交通运输中,常用“客运效率”来反映交通工具的某项效能,“客运效率”表示
每消耗单位能量对应的载客数和运送路程的乘积,即客运效率=人数×路程消耗能量。一个人骑电
动自行车,消耗1 MJ(106 J)的能量可行驶30 km,一辆载有4人的普通轿车,消耗320 MJ
的能量可行驶100 km,则电动自行车与这辆轿车的客运效率之比是( )
A.6∶1 B.12∶5
C.24∶1 D.48∶7
解析:选C 由题中公式得电动自行车的客运效率=
1×30×10
3
10
6
,普通轿车的客运效率
=4×100×103320×106,所以电动自行车与这辆轿车的客运效率之比是1×30×103106×320×1064×100×103=
24∶1。
10. (多选)如图2所示用滑轮组将重力为600 N的物体匀速提升,如果人用的拉力为250
N,则下列结论中正确的是( )
图2
A.如将物体提高2 m,拉力做功1 000 J
B.物体提高1 m,装置所做的有用功为250 J
C.物体以0.5 m/s的速度匀速被提升,拉力的功率为375 W
D.此时装置的机械效率是80%
解析:选CD 三根绳拉物体,所以拉力移动距离是物体移动距离的3倍,拉力做的功
为:W
F
=Fs=250×2×3 J=1 500 J,故选项A不正确。物体提高1 m,装置所做的有用功
为W有=Gh=600×1 J=600 J,故选项B不正确。物体以0.5 m/s的速度匀速被提升,拉力
第 5 页 共 5 页
的功率为P拉=Fv拉=250×0.5×3 W=375 W,故选项C正确。机械效率:η=GhFs=
600
3×250
=80%,故选项D正确。
11.一块长4 m的木板,一端放在地上,另一端搁在离地面1 m高的汽车车厢上,装
卸工人把一个重4 000 N的木箱沿着木板匀速推到车厢里,推木箱用的力为木箱重的0.5倍。
则:
(1)装卸工人把木箱推上去时受到的摩擦力是多少?
(2)克服摩擦做的功是多少?
(3)斜面的机械效率是多少?
解析:(1)装卸工人推木箱的力为:F=0.5G=2 000 N
克服摩擦力所做的功为:W额=fs=W总-W有=Fs-Gh=4 000 J
得f=1 000 N。
(2)W
额
=fs=4 000 J。
(3)η=
W
有
W
总
=50%。
答案:(1)1 000 N (2)4 000 J (3)50%
12.2015年,黄河中下游流域遭受大旱,给当地的农业生产造成了巨大的损失,当地
群众积极开展抗旱自救工作。农田灌溉需用水泵抽水,假设每分钟用水380 kg,所用水需
从15 m深的井里抽取,已知水泵的效率为80%,则水泵的输入功率至少是多少?
解析:水泵抽水是连续的,我们可以取一段时间(如1 min)分析,在此时间内把380 kg
的水提升15 m。
在1 min内,水泵克服水的重力做功为
W=mgh=380×9.8×15 J=55 860 J,
故水泵的有用功率P有用=Wt=
55 860
60
W=931 W,
根据η=
P
有用
P
总
×100%
知P总=P有用η=
931
80%
W=1 163.75 W。
答案:1 163.75 W