NIR与东京备忘录船舶风险评估机制的对比及启示
对巴黎备忘录新检查制度引入公司业绩的探讨

对巴黎备忘录新检查机制引入公司业绩的探讨上海海事局邱学刚(收录于《华东片船舶监督论文集》2010年9月)【摘要】巴黎备忘录PSC新检查机制—NIR(New Inspection Regime)将于2011年1月1日正式运行,代替现行的PSC检查系统。
本文试图根据NIR的相关规定,探讨公司业绩的具体计算方法,举例分析公司业绩对船舶风险等级的影响,并提出应对措施。
【关键词】巴黎备忘录新检查机制公司业绩计算方法应对措施一、引言巴黎备忘录于2009年5月18日至22日在冰岛雷克雅未克举行的第42次会议上通过了新PSC检查机制—NIR(New Inspection Regime),并将在2011年1月1日正式运行以替代现行的PSC检查系统。
NIR大量应用了基于风险的目标评估机制,同时对提高航运质量采取了有效的激励手段,对于高质量、低风险船舶将减少PSC检查的负担,而对于高风险船舶将采取更加深入和频繁的检查。
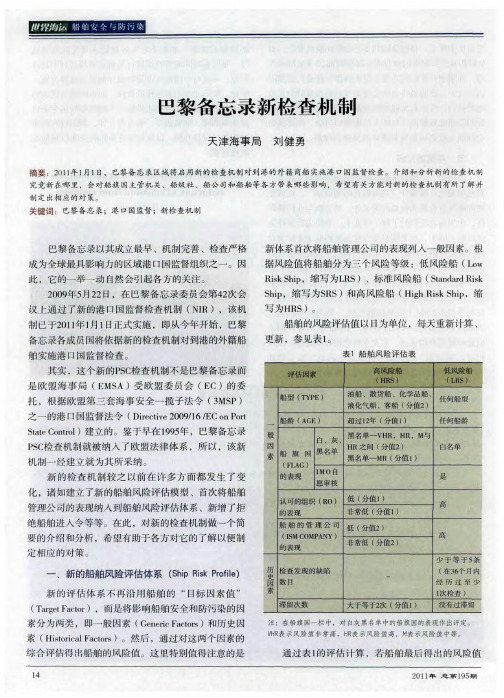
NIR充分考虑了近年来IMO的一些研究成果,建立了基于船舶基本参数和历史参数的船舶风险模型,给模型中的每个参数赋予一定的权值,以确定船舶的风险值进而评定船舶风险等级。
基本参数细化为船型、船龄、船旗国业绩、认可组织业绩和公司业绩等五个风险因素,历史参数则包括港口国监督检查的缺陷历史和滞留历史。
基本参数和历史参数基本采用了现行目标系数的风险因素,唯一新增项是公司业绩,而且根据船舶风险等级模型标准,如果船舶的风险值达到5点即为高风险等级船舶,而公司业绩的权值就重达2点,因此,公司业绩直接关系到船舶的风险等级。
本文试图根据NIR有关公司业绩的规定,探讨公司业绩的具体计算方法,举例分析公司业绩对船舶风险等级的影响,并提出应对措施。
二、NIR有关公司业绩的规定巴黎谅解备忘录第42次委员会会议的第PSCC42/4.2.2A号议案附件4《巴黎备忘录港口国监督新检查机制》第2.1.2节这样写道:公司业绩是影响船舶风险的重要参数之一。
不同水域船舶会遇危险评判阈值

㊀第43卷第4期㊀2020年12月中㊀国㊀航㊀海NAVIGATIONOFCHINAVol.43No.4㊀Dec.2020㊀收稿日期:2020 ̄07 ̄28基金项目:国家自然科学基金(51879119)ꎻ船舶态势智能感知系统研制(MC ̄201920 ̄X01)作者简介:陈传仁(1994 )ꎬ男ꎬ河南信阳人ꎬ硕士生ꎬ研究方向为交通信息工程及控制ꎮE ̄mail:201811823001@jmu.edu.cn通信作者:李国定(1963 )ꎬ男ꎬ江苏扬州人ꎬ副教授ꎬ船长ꎬ硕士ꎬ研究方向为海上交通运输工程ꎮE ̄mail:liguoding@jmu.edu.cn文章编号:1000-4653(2020)04-0027-06不同水域船舶会遇危险评判阈值陈传仁ꎬ㊀李国定ꎬ㊀李福生ꎬ㊀李丽娜ꎬ㊀陈国权(集美大学航海学院ꎬ福建厦门361021)摘㊀要:为确保船舶在不同水域实现不同会遇局面下的有效避碰ꎬ减少船舶碰撞事故的发生ꎬ依据«国际海上避碰规则»(InternationalRegulationsforPreventingCollisionsatSeaꎬCOLREGs)划分船舶航行水域和会遇局面ꎬ利用解析几何分析方法ꎬ结合调查问卷研究不同船型㊁不同会遇局面下的临界安全会遇距离SDAcꎮ结果表明:船舶会遇危险阈值存在差异性ꎬ无水域宽度限制的开阔水域和繁忙水域均为左舷来船时SDAc小于右舷来船时SDAcꎬ水域宽度受限的航道水域左右舷来船时SDAc基本相同ꎻ在相同会遇局面下ꎬ船型越大ꎬSDAc越大ꎬ船舶越危险ꎻ船型相同时ꎬ对遇㊁追越和交叉局面下的SDAc逐渐增大ꎬ危险度也逐渐增大ꎮ关键词:避碰ꎻ调查问卷ꎻ不同水域ꎻ会遇局面ꎻ临界安全会遇距离中图分类号:U675.96㊀㊀㊀文献标志码:ATheRiskThresholdofShipCollisioninDifferentWatersCHENChuanrenꎬ㊀LIGuodingꎬ㊀LIFushengꎬ㊀LILinaꎬ㊀CHENGuoquan(CollegeofNavigationꎬJimeiUniversityꎬXiamen361021ꎬChina)Abstract:Thewatersandencountersituationstheshipsareinisgroupedaccordingtothe COLREGs(InternationalRegulationsforPreventingCollisionsatSea) .Thecriticalsafedistancesofapproach(S)fordifferentshiptypesindifferentencountersituationsaredeterminedthroughanalyticalgeometricanalysiscombinedwithquestionnaires.TheinvestigationshowsthattheSforshipsapproachingfromthestarboardsideshouldbelargerthanthatforthosefromtheportsidewhetherinopenwaterareaorinbusywaterarea.WhileinconfinedwaterstheSshouldbebasicallythesameforshipsfromeitherside.GiventhesameencountersituationꎬthelargertheshiptypeisꎬthegreatertheSshouldbe.AsforashipinencounteringsituationꎬtheSshouldincreaseinorderofhead ̄onꎬovertakingandcrossing.Keywords:collisionavoidanceꎻquestionnaireꎻdifferentwatersꎻencountersituationꎻcriticalsafedistanceofapproach㊀㊀人工智能作为新一轮产业变革的核心驱动力ꎬ有助于推动科技的整体发展ꎬ随着航海仪器和航海相关智能感知设备等工具的开发与升级ꎬ保证船舶碰撞危险阈值的精确度和优化避碰模型势在必行ꎮ在船舶航行时设置的碰撞危险阈值有偏差会导致误报警时有发生ꎬ采取避碰措施也无法完全避免碰撞的发生ꎮ因此ꎬ优化船舶碰撞危险阈值的评判模型是当务之急ꎬ该模型可确保在不同水域下提供给不同类型的船舶准确的碰撞危险阈值ꎬ对获取船舶碰撞危险预警信息和开展避碰行动具有重要意义ꎮ船舶碰撞危险度一直都是海上交通工程研究的重点之一ꎬ国内外对船舶碰撞危险度进行了广泛的研究ꎮ早期GOODWIN[1]㊁DAVIS等[2]和COLLEY等[3]分别提出船舶领域㊁动界和RDRR(RangetoDomain/RangeRate)模型包括两船会遇时的最近会遇距离(DistanceofClosestPointofApproachꎬdCPA)㊁两船到达最近会遇距离时间(TimetoClosestPointofApproachꎬtCPA)㊁船舶领域(Domain)和动界(Arena)等避碰参数概念[4]ꎬ这些概念的提出具有重要的理论与实际意义ꎮ近年来ꎬCHIN等[5]建立一个有序概率单位回归模型ꎬ用于在港口水域航行过程中感知碰撞危险ꎮSILVEIRA等[6]提出一种根据船舶先前的位置㊁航向和速度估计未来的距离ꎬ并将其与规定的碰撞直径相比较ꎬ通过评估碰撞候选数量计算碰撞危险的方法ꎮSZLAPCZYNSKI等[7]提出基于领域的碰撞风险参数解析公式㊁领域违规度(DegreeofDomainViolationꎬDDV)和领域间违规时间(TimetoDomainViolationꎬTDV)ꎮ郑中义等[8]建立空间碰撞危险度㊁时间碰撞危险度和碰撞危险度模型ꎬ综合考虑碰撞的危险性和避碰的难易程度ꎬ但在船舶领域尚未考虑本船和目标船尺度的影响ꎬ且仅适用于开阔水域ꎮ王刚[9]利用扩展式博弈论执行船舶避让决策ꎬ在碰撞危险度方面利用模糊理论进行界定ꎬ实现在开阔水域内对两船对遇㊁交叉和追越的有效避让ꎮ苏鹏[10]采用几何分析方法确定船舶在不同位置的安全会遇距离(SafeDistanceofApproachꎬSDA)ꎬ求取船舶避碰时的最晚施舵时机ꎬ以评判船舶碰撞危险度ꎮ综上所述:现有的船舶碰撞危险阈值精确性不足ꎻ目前有关船舶碰撞危险阈值的研究多集中在开阔水域和港口水域ꎬ已有的科研成果大多是在1种水域下研究船舶碰撞危险阈值ꎮ智能化是现代航海船舶发展的主要方向ꎬ而船舶智能化的核心目标之一是航行安全ꎬ但船舶通航环境的复杂性决定了某种水域下的单一的危险评判阈值不适用于现阶段的水路运输ꎬ不能保障航行安全也就更不适用于智能航海ꎮ因此ꎬ研究在不同水域条件下的船舶会遇局面的危险评判阈值对保证海上交通安全和船舶安全避碰具有重要意义ꎮ本文研究在不同水域各种会遇局面下的SDAcꎬ提供与感知设备相匹配的足够精确的船舶碰撞危险评判阈值ꎬ为建立准确的船舶辅助避碰决策系统和实现船舶智能化航行奠定基础ꎮ1㊀SDA边界模型相关概念为保证船舶安全航行ꎬ能高效地实现能效智能管理ꎬ正确判断本船与他船是否存在碰撞危险ꎬ保证船舶碰撞危险评判阈值的准确性尤为重要ꎮ船舶碰撞危险评判阈值通常指SDA[11]ꎬ为更合理地划分船舶会遇时的危险度ꎬ根据COLREGs提出安全会遇距离的基本概念ꎬ结合解析几何理论分析ꎬ提出最大安全会遇距离SDAmax㊁临界安全会遇距离SDAc和安全会遇距离最小值SDAmin等3个判定危险度的重要概念ꎮ本文针对SDAcꎬ应用调查问卷法ꎬ结合解析几何理论分析临界碰撞距离ꎬ以此研究确定船舶碰撞危险评判阈值ꎮ1.1㊀SDA边界模型定义在原有港口水域船舶危险判断阈值模型的基础上ꎬ将不同等级的阈值作为SDA的边界ꎬ通过构建SDA边界模型实现不同水域危险判断阈值的合理量化ꎮSDA是模糊的概念ꎬ要实现船舶避碰预警ꎬ必须研究两船dCPA在什么范围内存在潜在碰撞危险ꎮ[12]SDA模型示意见图1ꎬSDAc介于SDAmin与SDAmax之间ꎬ有SDA⊇{SDAminꎬSDAcꎬSDAmax}(1)式(1)中:SDAmin为以本船为中心ꎬ不考虑操纵余地ꎬ两船保速保向不致发生碰撞的安全会遇距离最小值ꎬ又称临界碰撞会遇距离ꎻSDAc(SDAc=SDAmin+MSmin)是在SDAmin的基础上ꎬ加上避让时两船通过时边缘间的最小富余量MSminꎬ以SDAc作为两船是否存在潜在危险的重要判据之一ꎬ并作为SDA模糊边界{SDAcꎬSDAmax}的内边界ꎻSDAmax为最大安全会遇距离ꎬ指本船在避让他船时ꎬ仍保留一定时间余量进行操纵避让ꎬ使两船能在SDAc外通过的距离ꎮMSc为在SDAc的基础上一定时间的操纵余量ꎮ一般危险情况下ꎬ以dCPA<SDAc且tCPA>0为存在潜在危险的判定条件ꎬ以SDA=SDAmax作为两船避让时安全通过的SDAmaxꎮ根据上述安全会遇距离模型的相关概念ꎬ结合几何模型分析ꎬ得到SDA边界阈值模型示意见图2ꎮ图1㊀SDA模型示意图2㊀SDA边界阈值模型示意㊀㊀关于SDA边界阈值ꎬ与WOERNER等[13]有关最近会遇距离(ClosestPointofApproachꎬCPA)范围的研究内容不谋而合ꎬ虽然双方关注的重点有所区别ꎬ但各自研究内容的具体细节基本一致ꎮ因此ꎬ如何精确量化危险评判阈值是研究的重点ꎬ更是实现船舶智能化的关键ꎮ1.2㊀船舶临界碰撞会遇距离的计算模型㊀㊀基于镇扬汽渡水域船舶碰撞危险智能预警模型的研究与实践ꎬSDAmin是以本船雷达安装位置为中心ꎬ考虑两船的尺寸㊁会遇态势和船位误差形成的ꎮSDAmin是不考虑 操纵余地 ꎬ两船保速保向能避免碰撞的最小会遇距离ꎮ将本船雷达安装位置点和目标船的雷达回波中心点视为计算船舶距离的参考点ꎬ根据船舶SDAc的定义ꎬ将本船与目标船正好能交会通过时A㊁B两点的距离作为船舶的SDAminꎮ以本船过目标船艉部的某种情况为例加以分析ꎬ本船与目82㊀中㊀国㊀航㊀海2020年第4期标船的几何的关系见图3ꎮ㊀㊀图3中:Ct为目标船艏向ꎻCo为本船艏向ꎻα为从本船艏向沿顺时针方向到目标船艏向的夹角ꎬ当Ct-Co>0时ꎬα=Ct-Coꎬ否则ꎬα=Ct-Co+360ʎꎻLt为目标船船长ꎻLo为本船雷达位置点到船头的距离ꎻBt为目标船船宽ꎻBo为本船船宽ꎻA为本船雷达的安装位置点ꎻB为目标船的中心点ꎬAB即为所求的SDAminꎬ根据余弦定理可得SDAmin=Lo-12Btcscα()2+14(Lt+Btcotα)2+Lo-12Btcscα()(Lt+Btcotα)cosα+P(2)式(2)中:P为目标船定位精度ꎮ2㊀问卷调查概况2.1㊀问卷调查设计本次问卷调查设计是以两船SDAc为研究主体ꎬ通过有关SDA的知识ꎬ结合相对运动几何分析方法确定的会遇特征ꎬ综合考虑船舶避碰的难易程度ꎬ确定此次问卷调查的具体项目ꎮ2.1.1㊀关于两船SDAc的调查问卷该调查问卷在调查排除船速影响的情况下ꎬ本船与他船在不同会遇局面和不同航行水域过艏部或过艉部和过左侧或过右侧时的SDAcꎬ见图4ꎮ图3㊀本船过目标船艉部示例图4㊀SDAc示意2.1.1.1㊀水域特征划分和定义水域特征指船舶航行水域属于开阔㊁繁忙或航道所属不同水域ꎮ本次问卷将航行水域划分为航道水域㊁繁忙水域和开阔水域等3种水域ꎮ鉴于航海上对该概念没有明确的定义ꎬ基于船舶拟人智能避碰决策(PersonifyingIntelligentDecision ̄makingforVesselCollisionAvoidanceꎬPIDVCA)方法自定义如下ꎮ(1)航道水域:指水域宽度受限致使船舶改变航向受到严重限制的自然航道或人工疏浚航道水域ꎬ由海图数据和航路信息提供的水域界限定义ꎮ(2)繁忙水域:指由于船舶交通流和(或)密度的影响致使船舶大幅度改向受到限制的水域ꎮ(3)开阔水域:指船舶大幅度改向(包括旋回)不受限制且不对他船形成碰撞危险的水域ꎮ2.1.1.2㊀会遇局面的划分(1)目标船相对方位的划分ꎮ目标船相对方位的差别也会使两船避让决策方案发生变化ꎬ因此需对目标船的相对方位进行详细划分ꎮ考虑孙峰等[14]提出的典型船舶会遇态势关系区域图ꎬ以本船中心和本船真航向为参照建立坐标系ꎬ根据目标船的位置将其划分为a㊁b㊁c㊁d㊁e㊁f㊁g和h等8个区域(见图5)ꎮ图5㊀目标船相对方位详细划分示意㊀㊀图5中:a区域和b区域分别为左右舷对遇区域ꎻc区域和d区域分别为左右舷前方交叉区域ꎻe区域和f区域分别为左右舷正横附近交叉区域ꎻg区域和h区域分别为左右舷后方追越区域ꎮ(2)会遇局面的确定ꎮ综合考虑本船和目标船的航速㊁航向和目标船的相对方位ꎬ依据COLREGs中船舶在互见中的行动规则确定22种典型的会遇局面ꎬ并对其进行编号ꎬ各会遇局面的编号代表相对应状态的编号ꎬ即编号1代表状态1ꎬ编号22代表状态22等ꎬ会遇局面划分见表1ꎮ2.1.1.3㊀本船和目标船尺度的划分此次问卷将100m长的船舶作为船长L<150m代表船型ꎬ200m长的船舶作为船长150mɤL<250m代表船型ꎬ300m长的船舶作为船长Lȡ250m代表船型ꎮ2.2㊀调查对象及回收情况调查问卷采用纸质问卷的方式ꎬ针对具有丰富实船操控经验的船长㊁大副㊁二副和引航员等发放问卷150份ꎬ收回150份ꎬ其中有效问卷145份ꎮ3㊀调查结果及分析根据本船船长分为100m㊁200m和300m等3类问卷ꎬ分别获得32份㊁70份和43份答卷ꎮ3.1㊀数据处理对不同会遇局面下ꎬ不同尺度的本船在不同水92㊀㊀陈传仁ꎬ等:不同水域船舶会遇危险评判阈值表1㊀会遇局面划分会遇局面编号㊀本船左舷对遇㊀本船右舷对遇㊀本船右舷追越他船㊀本船左舷追越他船㊀右后方本船追越他船㊀左后方本船追越他船㊀左交叉㊀右交叉㊀左正横附近交叉㊀右正横附近交叉㊀左后方他船追越本船㊀右后方他船追越本船㊀本船左舷被追越㊀本船右舷被追越本船过他船左侧1本船过他船右侧2本船过他船右侧3本船过他船左侧4本船过他船艏部5本船过他船艉部6本船过他船艏部7本船过他船艉部8本船过他船艏部9本船过他船艉部10本船过他船艏部11本船过他船艉部12他船过本船艉部13他船过本船艏部14他船过本船艉部15他船过本船艏部16他船过本船艉部17他船过本船艏部18他船过本船艉部19他船过本船艏部20本船过他船右侧21本船过他船左侧22域中会遇不同尺度的他船ꎬ过其艏部㊁艉部㊁左侧和右侧时的SDAc进行问卷调查ꎮ调查问卷中数据处理部分采用数理统计的方法ꎬ利用数据的平均数㊁方差和中位数等统计量的计算ꎬ对问卷获得的样本数据进行研究ꎬ对样本数据中不合理的值用其他样本平均数进行插补ꎮ3.2㊀结果分析3.2.1㊀SDAc结果分析当在开阔水域条件下本船的尺度为100m时ꎬ对应的不同他船尺度在不同会遇局面下的SDAc结果分析如下ꎮ3.2.1.1㊀对遇局面问卷中对遇局面分为本船左舷对遇和本船右舷对遇2种局面下本船过他船左(右)侧的2种状态ꎬ其SDAc示意见图6ꎮ由图6可知:本船左右舷对遇时ꎬSDAc基本相同ꎮ3.2.1.2㊀交叉局面问卷中交叉局面详细划分为左交叉㊁右交叉㊁左正横附近交叉和右正横附近交叉等4种局面下本船过他船艏(艉)或他船过本船艏(艉)的8种状态ꎬ其中左右交叉局面下SDAc示意见图7ꎮ由图7可知:左右交叉时ꎬSDAc呈现出本船过他船艏部会遇局面下略大于本船过他船艉部会遇局面下的规律ꎬ且左交叉局面略小于右交叉局面ꎬ符合互见中COLREGs第16条 让路船的行动 和第17条 直航船的行动 条款ꎮ左右正横附近交叉与左右交叉的规律大体相同ꎬ其SDAc关系为他船过本船艉部会遇局面略小于他船过本船艏部会遇局面ꎬ且左正横附近交叉局面略小于右正横附近交叉局面ꎮ图6㊀对遇局面下SDAc示意图7㊀左右交叉局面下SDAc示意3.2.1.3㊀追越局面问卷中追越局面详细划分为本船左(右)舷追越他船㊁本船左(右)舷被追越㊁左(右)后方他船追越本船和左(右)后方本船追越他船等8种局面下本船过他船左(右)侧㊁本船过他船艏部(艉部)或他船过本船艏部(艉部)等12种状态ꎬ其中左右舷追越和被追越局面下SDAc示意见图8ꎮ由图8可知:本船左右舷追越和被追越时ꎬSDAc在本船过他船左(右)侧时基本相同ꎬ且在追越和被追越局面下也基本相同ꎮ左右后方被追越局面下SDAc示意见图9ꎮ图8㊀左右舷追越和被追越㊀㊀图9㊀左右后方被追越局面下SDAc示意局面下SDAc示意㊀㊀由图9可知:在本船左右后方被追越时ꎬSDAc满足他船过本船艉部会遇局面略小于他船过本船艏部会遇局面ꎬ且左(右)后方他船追越本船时基本一致ꎮ本船左右后方追越时和本船左右后方被追越时也呈现相似的规律ꎬ其SDAc满足本船过他船艏部会遇局面略大于本船过他船艉部会遇局面ꎬ且左(右)后本船追越他船时也基本一致ꎮ本船尺度和他船尺度均为100m时ꎬ在相同会遇局面开阔水域和繁忙水域条件下的SDAc比较见03㊀中㊀国㊀航㊀海2020年第4期图10ꎮ图10㊀SDAc比较图㊀㊀由图10可知:在会遇局面下ꎬ当本船和他船尺度相同时ꎬ开阔水域条件下的SDAc大于繁忙水域条件下的SDAcꎮ结合所有数据的具体结果可知:在开阔水域㊁本船尺度为200m和300m的条件下ꎬ以及在繁忙水域条件下ꎬ对应的不同船舶尺度在不同会遇局面下的SDAc与在开阔水域条件下本船尺度为100m时具有相似的规律ꎻ在航道水域条件下ꎬSDAc与开阔水域和繁忙水域条件下的SDAc基本一致ꎬ唯一不同是在航道水域条件下无左右舷来船之分ꎬ其左舷来船和右舷来船的SDAc基本相同ꎮ综上所述ꎬ可得出以下结论:(1)在相同水域条件下ꎬ当本船和他船的尺度确定时ꎬ状态5~状态12中本船过他船艏部会遇局面下的SDAc略大于本船过他船艉部会遇局面下的SDAcꎮ(2)在相同水域条件下ꎬ当本船和他船的尺度确定时ꎬ状态13~状态20中他船过本船艏部会遇局面下的SDAc略大于他船过本船艉部会遇局面下的SDAcꎮ(3)在相同水域条件下ꎬ当本船和他船的尺度确定时ꎬ状态21㊁状态22和状态1~状态4中本船过他船左侧会遇局面下的SDAc与本船过他船右侧会遇局面下的SDAc基本相同ꎮ(4)在相同会遇局面下ꎬ当本船和他船的尺度确定时ꎬ开阔水域条件下的SDAc大于繁忙水域条件下的SDAcꎮ(5)在开阔水域和繁忙水域条件下ꎬ当本船和他船的尺度确定时ꎬ在左舷来船局面下和右舷来船局面下(如左交叉和右交叉)略有不同ꎬ基本满足左舷来船时SDAc略小于右舷来船时SDAcꎮ(6)在航道水域条件下ꎬ当本船和他船的尺度确定时ꎬSDAc在左舷来船局面下和在右舷来船局面下基本相同ꎮ3.2.2㊀SDAc比较分析根据问卷调查结果发现ꎬ对遇㊁交叉和追越等局面下的SDAc有一定的差异ꎬ彼此之间存在一定的隐性关系ꎮ本文仅示例分析调查问卷中在开阔水域条件下本船尺度为100m且他船尺度为100m时各种会遇局面的SDAcꎮ通过上述会遇局面的划分ꎬ对本船左舷来船和本船右舷来船进行分析ꎬ其中状态3~状态8因相对方位角不符而不参与分析ꎮ将状态1㊁状态2和状态9~状态22的SDAc输入到MATLAB程序中ꎬ通过最小拟合的最小二乘法原理拟合数据ꎬ调查问卷中在开阔水域条件下本船和他船的尺度均为100m时ꎬ各种会遇局面下的SDAc拟合示意见图11ꎮ图11㊀SDAc拟合示意㊀㊀由图11可知:本船左舷来船与本船右舷来船时的SDAc拟合曲线趋势相似且其SDAc拟合值较为接近ꎮ由于调查问卷中会遇局面划分较为详细ꎬ目前数据还无法确定各会遇局面的定性关系ꎬ因此仅将各会遇局面涵盖在COLREGs提出的对遇㊁交叉和追越等3种局面下分析ꎬ可知SDAc在交叉局面下最大ꎬ在追越局面下次之ꎬ在对遇局面下最小ꎮ本船右舷来船时SDAc在相对方位角为(0ʎꎬ6ʎ)时最小ꎬ在相对方位角为(6ʎꎬ112.5ʎ)时逐渐增大ꎬ在相对方位角为(112.5ʎꎬ180ʎ)时逐渐减小ꎮ本船左舷来船时SDAc与本船右舷来船时SDAc存在相同的规律ꎬ均为SDAc随着相对方位角的增大先逐渐增大再减小ꎮ3.3㊀比例系数λMs的确定对于海上交通安全而言ꎬ船舶在采取避碰行动的关键时期是分秒必争的ꎬ为方便驾驶员能在第一时间掌握各会遇局面下的SDAcꎬ可通过引入比例系数λMsꎬ根据各会遇局面下SDAc的大小关系ꎬ及时确定某会遇局面下的SDAcꎬ保证驾驶员有足够的时间思考并及时采取正确的避碰措施ꎮ比例系数λMs确定的具体步骤如下:1)通过问卷获取不同会遇局面和不同船舶尺度过艏部或过艉部和过左侧或过右侧的SDAcꎮ2)根据几何模型ꎬ计算不同会遇局面和不同船舶尺度下过艏部或艉部的SDAcꎮ3)根据MSmin=SDAc-SDAminꎬ获得在不同会遇局面和不同船舶尺度下过艏部或艉部的MSminꎮ13㊀㊀陈传仁ꎬ等:不同水域船舶会遇危险评判阈值4)根据MSmin的分析结果ꎬ由每种船舶尺度下的最大MSmin可得到不同会遇局面和不同船舶尺度下过艏部或艉部的MSmin相对其最大值的比例系数λMs=MSminmaxMSminꎮ将每种水域条件下本船尺度为100m的船舶对应他船尺度为100m㊁200m和300m类型的船舶得到的各会遇局面下的比例系数λMs记录在一个表格中ꎬ每个表格中包含66个系数ꎮ问卷中涉及3种水域条件㊁3种本船尺度ꎬ故可得到获取比例系数的9个表格ꎮ3.4㊀问卷内容整理由调查问卷调查的结果可知:本船追越他船局面下和他船追越本船局面下其SDAc基本一致ꎬ无左舷来船和右舷来船之分ꎮ因此ꎬ在后续的研究工作中ꎬ将现阶段调查问卷中有关会遇局面划分的内容进一步调整为:1)(左右舷)追越和被追越改为本船追越他船㊁他船追越本船ꎮ2)左右后方被追越改为后方他船追越本船ꎮ3)左右后方追越改为后方本船追越他船ꎮ综合考虑本船㊁目标船的航速㊁航向和目标船的相对方位ꎬ最终确定16种会遇局面ꎮ通过问卷结果对会遇局面相关内容进行调整ꎬ可为后续课题研究减轻负担ꎬ是研究过程中查漏补缺的关键环节ꎮ4㊀结束语本文基于调查问卷研究初步获得在不同水域㊁不同会遇局面下不同船舶尺度的SDAcꎬ了解到各会遇局面下SDAc的潜在关系ꎮ同时ꎬ记录船讯网上船舶航行时的各项航行数据ꎬ获得与调查问卷中各会遇局面相匹配的实测数据ꎮ通过二者对比发现:调查问卷中航道水域㊁繁忙水域和开阔水域条件下各会遇局面的SDAc与实测值均存在不同程度的误差ꎬ且其结果总体偏大ꎬ有待借助数据挖掘等方法ꎬ结合实测数据对问卷结果进行修改ꎮ尽管问卷调查是针对互见情况进行的ꎬ目前由于船舶感知设备尚不具备对COLREGs第18条船舶之间的责任条款中权利船舶进行识别的功能ꎬ故未设计该情况下的项目调查ꎬ但若能获得该条款下的权利船舶特征ꎬ诸如船舶自动识别系统(AutomaticIdentificationSystemꎬAIS)信息ꎬ依然可采用该问卷调查值ꎬ或根据权利船的特殊情况(如考虑操限船作业水域等)ꎬ通过调整危险评判阈值调整系数(互见中机动船阈值调整系数为1)实现ꎮ对于COLREGs第19条在能见度不良情况下的危险评判阈值ꎬ在模型中可根据能见度仪信息自动调整系数ꎬ以满足安全要求ꎮ通过理论与实践相结合完善并精确各会遇局面下的SDAcꎬ建立不同水域船舶会遇危险评判阈值系统ꎬ仍需进一步研究ꎮ保证危险评判阈值系统的正确性能提高预警率ꎬ为建立准确的船舶避碰辅助决策奠定基础ꎬ提高船舶避碰的有效性ꎬ同时在自动避碰方面为实现船舶智能航海提供技术保障ꎮ参考文献[1]㊀GOODWINEM.AStatisticalStudyofShipDomains[J].JournalofNavigationꎬ1975ꎬ(28):328 ̄344.[2]㊀DAVISPVꎬDOVEMJꎬSTOCKELCT.AComputerSimulationofMarineTrafficUsingDomainsandArenas[J].JournalofNavigationꎬ1980ꎬ33(2):215 ̄222.[3]㊀COLLEYBAꎬCURTISRGꎬSTOCKELCT.ManoeuveringTimesDomainsandArenas[J].JournalofNavigationꎬ1983ꎬ(36):324 ̄328.[4]㊀程浩.海上交通安全中船舶避碰决策技术研究[D].大连:大连海事大学ꎬ2009.[5]㊀CHINHCꎬDEBNATHAK.ModelingPerceivedCollisionRiskinPortWaterNavigation[J].SafetyScienceꎬ2009ꎬ47(10):1410 ̄1416.[6]㊀SILVEIRAPAMꎬTEIXEIRAAPꎬGUEDESSOARESC.UseofAISDatatoCharacteriseMarineTrafficPatternsandShipCollisionRiskofftheCoastofPortugal[J].JournalofNavigationꎬ2013ꎬ(66):879 ̄898.[7]㊀SZLAPCZYNSKIRꎬSZLAPCZYNSKAJ.AnAnalysisofDomain ̄BasedShipCollisionRiskParameters[J].OceanEngineeringꎬ2016ꎬ126:47 ̄56.[8]㊀郑中义ꎬ吴兆麟.船舶碰撞危险度的新模型[J].大连:大连海事大学学报ꎬ2002ꎬ28(2):1 ̄5.[9]㊀王刚.船舶扩展式博弈避碰决策系统建立与仿真研究[D].大连:大连海事大学ꎬ2014.[10]㊀苏鹏.港口水域船舶碰撞危险预警模型及应用[D].厦门:集美大学ꎬ2015.[11]㊀李丽娜.船舶自动避碰研究中安全会遇距离等要素的确定[J].大连:大连海事大学学报ꎬ2002ꎬ28(3):23 ̄26.[12]㊀高建杰.镇扬汽渡水域船舶碰撞危险智能预警模型研究[D].福建:集美大学ꎬ2018.[13]㊀WOERNERKꎬBENJAMINMRꎬNOVITZKYMꎬetal.QuantifyingProtocolEvaluationforAutonomousCollisionAvoidance[J].AutonomousRobotsꎬ2019ꎬ43:967 ̄991.[14]㊀孙峰ꎬ蔡玉良ꎬ马吉林.船舶智能避碰策略测试方法与指标研究[J].交通信息与安全ꎬ2019ꎬ37(5):84 ̄93.23㊀中㊀国㊀航㊀海2020年第4期。
船舶风险评估报告模板

船舶风险评估报告模板1. 项目背景该风险评估报告是针对船舶海上运输项目进行的评估工作。
本报告的目的是分析和评估船舶运输项目在实施过程中可能面临的各种风险,并提供相应的对策和建议,以确保项目顺利进行。
2. 评估方法本次评估采用多种风险评估方法,包括但不限于:- 文件和文献的分析- 专家咨询和访谈- 风险矩阵和概率分析等定性和定量评估方法3. 风险识别与分析3.1 风险识别根据对船舶运输项目的项目计划以及相关文件和文献的分析,识别出以下主要风险:1. 预算风险:由于船舶、燃料和人员等成本的不确定性,预算风险可能导致项目超支。
2. 船舶设备故障:船舶设备的故障可能导致运输延误或事故发生。
3. 气候风险:不可控的气候变化可能导致航线关闭或不安全的航行条件。
4. 船员健康问题:船员的健康问题可能影响船舶运输的连续性和安全性。
5. 安全风险:包括海盗袭击、火灾、爆炸等各类安全风险。
6. 法律与合规风险:船舶运输项目可能受到各种国际和国内法律法规的制约和限制。
3.2 风险分析在对以上识别出的风险进行分析时,我们采用了风险矩阵和概率分析等方法,对风险的可能性和影响程度进行评估。
以下是我们对以上主要风险的分析结果:风险可能性影响程度风险等级-预算风险高中高船舶设备故障中高高气候风险高高高船员健康问题中中中安全风险低高中法律与合规风险高中高其中,风险等级根据可能性和影响程度的综合评估结果确定,高表示风险程度较高,需要优先考虑采取相应措施降低风险。
4. 对策与建议基于以上风险分析结果,我们提供以下对策和建议来降低风险和应对可能发生的问题:1. 预算风险:建议制定详细的预算计划,并进行充分的预算准备。
同时,与各合作方签订明确的合同,确保合同中对成本波动的约定和补偿机制。
2. 船舶设备故障:建议制定船舶维护计划,并定期进行检修和保养。
确保备用设备的完备性,以应对可能的设备故障。
3. 气候风险:根据气象部门提供的信息,制定相应的气候风险管理计划。
巴黎备忘录新检查机制
列 为第 二级 。其 中 ,越级 因素 包括 :巴黎备 忘录成 员
国通报 的船 舶 、发生 碰撞 或搁 浅事 故 的船 舶 、存在 非 法 排放 的船 舶 、不安 全操 纵 的船 舶 、船级 被 中止或 撤
注 :1在 对 船 舶 进 行 检 查 发 现 的缺 陷 中 ,属 于 IM 陷 的 ,每 条 缺 . S缺
销 的船 舶 、数据 库 中没有 记 录的船 舶 。不 可 预见 的因 素 包括 :引航 员 、V S T 、船 长 、船 员或其 他 方举 报 的 船 舶 ,没有 按规 定报 告 的船舶 ,存 在未 纠正缺 陷 的船
在新 的检查 机制 中 ,对 所有 风险等级 的船舶还 规 定 了 检 查 的 顺 序 , 即 检 查 的 优 先 级 ( n p ci 1 I S e tO 3
Pi i ),分为第一级 ( r ry ) rr ot y Pii 和第二级 ( r ry o tI Pii ot
I )。属 于第 一 级检 查顺 序 的船 舶 ,无 论 处于 何种 风 I
二 、对船 舶 管 理公 司表现
P r r ne 的评 价 ef mac ) o
ห้องสมุดไป่ตู้
( mP Y C0 a n
在新 的 检查 机 制 中 ,首次 对 船 舶管 理 公 司 ( S IM
所 指 的船 公 司 )的表 现进行 评 价 ,并 纳 人对 其管 理 的
船 舶 的风 险评 估 因素 。船 队 中每艘 船舶 的状 况都 是对 公 司进 行评 价 时要 考虑 的 因素 。这样 一来 ,公 司 的表 现与其 管理 的船 舶挂 钩 ,能够 较真 实 地反 映公 司整体 的安 全 和 防污染 管 理 水平 ,在很 大 程度 上 减 少IM体 S 系审核 中出现 的 “ 两层皮 ” 现象— — 公 司的体 系文 件
船舶风险评估
级标准,再逐一评估得到[6 , 7 ] . 因此,输入变量可能是FL , CS 模糊集 中具有隶属度的语言值,也可能是[0 ,1 ]上的实数值(模糊等级) . 语言 值可直接进行模糊推理;实数值则需根据概率、危害等级标准进行模 糊化,判断其隶属于模糊集上的哪些语言值及其隶属度.
(2) 模糊推理运算 输入变量模糊化后,其可能隶属于几个语言值,则进行模糊推理时 可能涉及到多个模糊规则. 在其涉及到的第i ( i = 1 , ⋯, I) 个模糊规 则中,若输入变量对该规则中概率语言值的隶属度为μFL , i ,对该规则 中危害语言值的隶属度为μCS , i ,则评估风险对该规则中风险语言值 的隶属度μi 可用下式表示为: μi = min (μFL , i ,μCS , i ) (4) 评估风险的语言值模糊集L rj可表示为: L r j = { max (β1 , i ,“可忽略的”) ;max (β2 , i ,“合理可行的”) ; max (β3 , i ,“高风险的”) ;max (β4 , i ,“不可接受的”) } (5) 式中:β1 , j表示经过模糊推理运算后,第i ( i = 1 , ⋯, I) 个模糊规 则中的评估风险对风险语言值“可忽略的”的隶属度;同理,β2 , i ,β3 , i ,β 4 , i分别表示其对风险语言值“合理可行的”、“高风险的”、“不可接受的” 的 隶属度. (3) 模糊集清晰化
0,0.1,0. 2 可忽略 的
0.3,0.4, 0.5 合理可 行的
0.6,0.7, 0.8 高风险 的
0.9,1.0
不可
风险(Risk) 是根据事件发生的概率( P) 及其危害( C) 来评价的, 即: Risk = f ( P , C) .
模糊规则是用 IF2THEN 的形式建立概率、危害和风险之间语言 值的联系. 如: IF (事件发生概率等级是经常性的) and (其危害是灾难 性的) Then (事件发生的风险是不可接受的) .
谈对欧美PSC检查先进经验的借鉴

谈对欧美PSC检查先进经验的借鉴忠国强【摘要】大量国外老旧、低标准船船涌入我国沿海和内河港口,给我国水域安全和环境带来严重威胁。
为了从根苓上杜绝低标准船舶的危害,保证海上安全,保护海洋环境,使我国走向海事强国,我们有必要认真地研究和借鉴发达国家的经验,彻底将外籍低标准船舶拒于国门之外。
%A considerable ntnnber of aged, substandard ships imported from abroad are trading in our coastal and inland waters, posing serious risks to the waterborne safety and environment. In order to diminate the harm of substandard ships fundamentally, ensure maritime safety, protect the marine environment, and make China a powerful maritime country, it' s necessary for us to study and learn fiom the experiences of the developed countries and to prevent the entry of the substandard ships imported from abroad thoroughly.【期刊名称】《中国海事》【年(卷),期】2012(000)002【总页数】5页(P38-42)【关键词】老旧船;PSC;检查机制【作者】忠国强【作者单位】河北远洋运输集团,河北秦皇岛066001【正文语种】中文【中图分类】U692严格的、有针对性的港口国检查(PSC)是清除低标准船,确保我国水域安全与防止污染的重要措施。
全球备忘录组织2013年PSC检查回顾

全球备忘录组织2013年PSC检查回顾张先明;傅恒星【期刊名称】《中国海事》【年(卷),期】2014(000)002【总页数】4页(P52-55)【作者】张先明;傅恒星【作者单位】长航油运;长航油运【正文语种】中文一、TOKYO MOU(东京谅解备忘录)TOKYO MOU成员累计检查船舶38864艘次,无缺陷通过12249艘次,无缺陷通过率31.5%,滞留船舶1 308艘次,滞留率3.4%;滞留缺陷累计3536条,平均2.7条/艘次。
注:TOKYO MOU网站数据库中查询的滞留船舶数据与滞留清单中不符,下述分析中以月度滞留清单数据为准。
(一)港口国(地区)检查及滞留情况主要滞留港口国( 地区)包括:中国检查9553(占总检查数24.6%,下同)艘次,无缺陷通过1 301(占本国检查13.9%,下同)艘次,滞留611(滞留率6.4%,下同)艘次;澳大利亚检查4 737(12.2%)艘次,无缺陷通过1 413(29.8%)艘次;滞留223(4.7%)艘次;日本检查6 363(16.4%)艘次,无缺陷2041(32.1%)艘次,滞留184(2.9%)艘次;韩国检查2872(7.4%)艘次,无缺陷767(26.7%)艘次,滞留102(3.8%)艘次;马来西亚检查1 024(2.6%)艘次,无缺陷459(44.8%)艘次,滞留15艘次;越南检查1 898(4.9%)艘次,无缺陷556(29.3%)艘次;滞留20艘次;香港检查786艘次,无缺陷120(15.3%)艘次,滞留38(4.8%)艘次;印尼检查3091(7.9%)艘次,无缺陷2052(66.4%)艘次,滞留32艘次;新加坡检查1 340艘次,滞留21艘次;俄罗斯检查1 893艘次,滞留13艘次;智利检查1176艘次,滞留17艘次;加拿大检查406艘次,滞留8艘次;新西兰检查471艘次,滞留7艘次;菲律宾,检查2535艘次,滞留4艘次。
滞留分布如下:(二)滞留船型分布多用途船545艘次,散货船381艘次;集装箱船125艘次;冷藏船52艘次;其他特殊用途船33艘次;油船38艘次;气体运输船21艘次;汽车运输船15艘次;化学品船43艘次;其他少于10艘次的各型船计39艘次。
船载航行数据记录仪(VDR)复议案例引发的思考
船载航行数据记录仪(VDR)复议案例引发的思考许春松;於晓川【期刊名称】《中国海事》【年(卷),期】2018(000)002【总页数】2页(P31-32)【作者】许春松;於晓川【作者单位】天津海事局;天津海事局【正文语种】中文船载航行数据记录仪(VDR)被称为船舶的“黑匣子”,在海难及事故调查中发挥重要作用,SOLAS公约2000年修正案生效后,对于客船和3 000总吨以上的货船,VDR成为船舶强制配备的设备之一。
VDR的检查也逐渐成为PSC检查的重点,VDR的性能技术标准多次修正,涉及PSC检查的争议点较多。
下面笔者介绍一起典型东京备忘录VDR适用性能技术标准的PSC检查复议案例。
一、案例情况2016年11月,巴拿马籍某散装化学品船靠泊东京备忘录某港口,根据东京备忘录新检查机制,当时该轮进入检查窗口期,港口国监督(PSC)检查官将其选为检查目标船舶,并登轮实施了检查。
检查中发现该轮安装的VDR不符合IMO发布的船载航行数据记录仪性能标准。
根据SOLAS公约及其引用的IMO决议要求,2014年7月1日及以后安装上船的VDR应该符合MSC.333(90)决议规定的性能标准,船舶结构安全证书显示船舶龙骨安放时间为2014年7月7日,但是船舶安装的VDR并不符合MSC.333(90)决议规定的性能标准。
考虑到VDR的重要性,船舶安全检查员对该船舶实施了滞留措施,滞留缺陷如下:缺陷代码:10114(航行数据记录仪)缺陷描述:THE DATE OF KEEL LAID IS 07-07-2014,BUT THE VDR FITTED ON BOARD NOT CONFORM TO THE REQUIREMENT OF RESOLUTION MSC.333(90).公约依据:S74-24/CV/R20SOLAS公约第24次修正第五章第20条(2002年7月1日)主要内容有,为有助于海难事故调查,从事国际航行船舶配备航行数据记录仪的具体船型、建造时间、性能标准要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有船舶的缺陷率有关。其中,滞留率为ISM管理公司所
有船舶在过去36个月内在欧盟地区接受检查时被滞留总
次数除以接受相应检查的艘次数:缺陷率为ISM管理公
司所有船舶在过去36个月内在欧盟地区接受检查发现缺
陷总点数除以接受相应检查的艘次数。值得一提的是,
计算缺陷数时,每项普通缺陷计为1点,而lSM缺陷将
计为5点。计算出来的滞留率和缺陷率将分别与欧盟所
辖区域平均滞留率和缺陷率进行比对,依比对结果分为
高于、低于及等于平均值。应注意的是,在过去36个月
内JSM管理公司所属任一船舶被拒绝进港,该管理公司
的滞留率将被自动标注为高于平均滞留率。
二、船舶风险评估机制的对比分析
NlR和东京备忘录现行的船舶风险评估机制各有其
特点,其具体评估方法比对见表2。
从表2可知,这两种评估机制均考虑了船型、船
龄、认可组织、船旗国、缺陷和滞留等参量对船舶安全
性的影响,但也存在一些差异。
(一)评估方法差异明显
NIR船舶风险等级分类简单科学,分为高风险、中
等风险和低风险三个等级,符合管理学的橄榄型组织理
论。在风险评估核算方法上,NIR采用风险综合评估法
先行对各相关评估参量进行核算的结果,然后组合相
加,且各评估参量是动态相关的,因此更加客观和符合
实际情况。东京备忘录现行的船舶风险评估机制采用的
是风险系数法,即根据定量分析的方法将各个相关因素
进行量化,然后计算得出每一艘船的最终分数,再根据
分数的多少来确定船舶的风险等级,并且把风险等级分
为极高风险、高风险、中等风险和低风险四个等级,等
级划分过于复杂笼统。建议东京备忘录参考现代数学研
究成就(如人工智能计算中的神经网络理论),设计一
套各参量动态相关的、有自我学习能力的船舶风险度评
估系统。
(二)NIR中增加了管理因素控制
根据大量的海上事故统计表明,大约有80%的事
故是由人为因素造成的,而人为因素与船舶ISM管理公
司管理不到位密切相关。NlR将公司管理和船舶管理紧 密联系起来,实现了船舶和其管理公司的安全记录的高 度关联,强化了对人为因素在海上安全链中的监控。东 表2船舶风险评估机制的对比 东京备忘录 巴黎备忘录 评估 风险系数法 船舶风险概况评估法 方法 大于100分 极高风险 大于等于5分 高风险 风险 41—1O0分 高风险 符合低风险 低风险 等级 标准 介于高风险与 中等 判定 1140 中等风险 低风险之间 风险 0—10 低风险 参量 标准 得分 标准 得分 6—1O年 5分 11—1 5年 10分 在1 0分基础上每 大于12年 2分 船龄 1620年 增加1年加1分 在1 5分基础上每 大于20年 增加1年加2分 船龄大于等于1 5 年的油船、化学 油船、化学品船、 品船、散货船、客 船型 4分 气体运输船、 2分 船、多用途船、冷 客船、散货船 藏船、滚装货船和 滚装客船 黑名单中的极高 船 船旗所属船舶的 风险、高风险及 2分 旗 滞留率高于过去3 母局十 年该地区整体平 1个百分点 中高风险的船旗国 国 加1分 黑名单中的 均滞留率 1分 中等风险船旗国 评 上一次跟踪检查 每一个缺陷 估 及未纠正的缺陷 2分 内 容 缺陷 前4次检查的缺陷 每个缺陷 数和跟踪复查新 0 6分 发现缺陷数 滞留1次.1 5分, 36个月内 前4次检查的 滞留2次30分 滞留 被滞留大于 ]分 滞留数 滞留3次6O分, 等于2次 滞留4次:100分: 船 级  ̄IACS成员 1O分 表现差或极差 1分 社 首次进八T—MOU 辖区或24个月内 50分 检查 未接受T—MOU有 时间 关成员国检查 间隔 1224+ ̄J 6分 6—12个月 3分 iSM 管理 表现差或极差 2分 公司 京备忘录现行的船舶风险评估机制并没有考虑管理公司
表现对船舶风险评估的影响,忽略了对海上安全重要决
定因素——人为因素的监控,因而无法全面客观体现到
中国海事09
麟
曩为
港船舶的风险度。建议东京备忘录参照NlR将ISM公司 管理表现纳入船舶风险评估体系,在条件成熟时甚至将 该轮船员的表现纳入船舶风险评估体系加以评估。 (三)NIR ̄:BPSC0个人因素对船舶风险度的影响 降到最低 东京备忘录船舶缺陷和滞留在船舶风险评估中占得 比重过大,比如前4次检查中每一个缺陷记0 6分,一个 未关闭缺陷记为2分,滞留一次记1 5分,滞留3次iF ̄60 分。由于政治、历史、经济、文化背景及经济发展水平 的不同,东京备忘录各成员国PSC检查发展并不平衡, 加上PSCO个人的专业背景和职业素养等因素,有时在 对待同一艘船舶同样问题的理解和处理可能有完全不同 的结果,甚至产生一些不公正的缺陷和滞留,从而严重 影响船舶的风险等级,降低了评估结果的客观性。为 了克服此弊端,NIR简化了缺陷和滞留等评估参量的标 ;隹,仅在低风险船舶评估模型中考虑船舶缺陷数对判定 低风险船舶的影响,并且在风险评估时降低了滞留记录 对船舶风险等级的影响,因此在一定程度上遏制PSCO 个人因素对船舶风险评估的影响。建议东京备忘录重新 审视缺陷和滞留参量在船舶风险评估中的权重,使得风 险评估尽可能客观公正。 (四)船型参量标准及其相应赋值存在明显差异 方面,巴黎备忘录的高风险船舶包含了油船、化 学品船、气体运输船、客船以及散货船,但不受船龄的 限制;而东京备忘录的高风险船型虽包含船龄大于等于 1 5年的油船、化学品船、散货船、客船、多用途船、 冷藏船、滚装货船和滚装客船等船型,但是受到船龄因 素的限制,不能体现低船龄危险品船的风险度。另一方 面,东京备忘录的高风险船型记为4分,仅只占极高风 险基 隹分数(1 00分)的4%,而巴黎备忘录的高风险 船型记为2分,却占高风险基准分数(5分)的40%。 由此可见,巴黎备忘录高度重视危险品船等高风险船型 的监管,这也体现了当今全球港口国监督的发展趋势。 因此,建议东京备忘录对船舶的风险船型重新分类,并 提高高风险船型在风险评估中的杈重。 (五)船龄划分各有特点 随着航运经济的发展和公众对航运安全期望的提高, 巴黎备忘录在船舶进行风险评估时提高并简化了船龄参量 10 的标准,仅将船龄参量的标准划分为船龄小于12年和大于
等于12年。东京备忘录各成员国经济总体发展水平比巴黎
备忘录低且不均衡,船舶管理水平也参差不齐,船舶老龄
化日趋严重,船况也大多随船龄的增长而迅速下降。鉴于
此,东京备忘录对船龄参量的标准做了详细的划分,其风
险系数随着船龄的增加而明显增加,这一船龄划分方法更
符合亚太地区的实际情况,但建议适当提高船龄参量的标
准以促进本区域的船舶更新并淘汰老旧船舶。
(六)船旗国的表现
为有效打击低标;隹船旗,N I R将黑、灰、白
(BGW)名单和lMO履约审核情况作为船旗国参量的
标准,黑名单中的极高风险、高风险及中高风险的船旗
国记2分,黑名单中的中等风险船旗国记1分,对拟当低
标;隹船舶避风港的黑名单船旗国给予严厉打击,对主动
履约的船旗国给予奖励,提高了船旗国管理船舶的安全
主体义务,减轻港口国监督检查的成本。东京备忘录目
前只是把最近3年内船旗国所属船舶的滞留率与区域平
均滞留率的比较情况作为船旗国参量的标;隹,对优、劣
船旗国没有科学细分,让低标;隹船旗国在东京备忘录还
有一定的市场。建议东京备忘录制定更为严格的船旗国
管理制度,对表现低于一定值的船旗国船舶可以拒绝其
进港,让低标准船旗在本区域没有市场。
(七)认可组织的区分
NlR对认可组织标;隹进行了细分,并且将是否属于
欧盟认可的认可组织纳入评估标准。东京备忘录只是简
单地将是否属于IACS作为认可组织参量的标;隹 因此
不能分层次地体现出认可组织参量对船舶风险评估的影
响并促使其进行良性的竞争。建议东京备忘录结合亚太
区的实际情况,建立科学的认可组织区分机制,对低标
;佳的检验发证机构给予严厉打击。
(八)对检查时间间隔采用
NlR把船舶的检查时间间隔从船舶风险参量中剥
离,而只是把其作为是否实施检查的参照依据,使得船
舶的风险值相对更加纯粹和客观。而东京备忘录把船舶
检查间隔时间作为一个风险参量直接加以计算,稀释了
船舶的真正风险度,相对容易混淆优、劣船舶的界限。
建议东京备忘录参考NIR的做法,同样把船舶的检查时
间间隔从船舶风险参量中剥离。
(作者单位:厦l’1海事局)
(照片提供:张永刷)