一种改进的模糊边缘检测算法
数字图像处理中的边缘检测算法改进方法
数字图像处理中的边缘检测算法改进方法引言:边缘检测在数字图像处理中起着重要的作用,它能够有效地提取图像中的边缘信息,为后续的图像分析和识别任务提供重要的基础。
然而,传统的边缘检测算法存在一些问题,如对噪声敏感、边缘断裂等。
因此,人们提出了各种改进方法来解决这些问题。
本文将介绍几种常见的边缘检测算法改进方法,包括基于梯度的方法、基于模型的方法和基于深度学习的方法。
1. 基于梯度的方法改进基于梯度的边缘检测算法,如Sobel算子、Prewitt算子和Canny算子,对图像进行梯度运算来检测边缘。
然而,这些方法容易受到噪声的干扰,导致边缘检测结果不准确。
为了改进这个问题,人们提出了以下几种方法:a) 自适应阈值法:根据图像的局部统计特性,自适应地选择阈值。
通过动态调整阈值可以有效地抑制噪声的干扰。
b) 非极大值抑制:在梯度图像上对每个像素进行局部极大值的判断,剔除非边缘点,以得到更准确的边缘位置。
c) 双阈值法:将图像的梯度分为强边缘和弱边缘两部分,选择适当的阈值来判断边缘是否真正存在,以减少误检率。
2. 基于模型的方法改进基于模型的边缘检测算法将图像中的边缘视为一种特殊的线段或曲线,并通过拟合模型来检测边缘。
这些方法相对于基于梯度的方法更加稳定,能够有效地解决边缘断裂的问题。
以下是几种常见的基于模型的改进方法:a) Hough变换:将图像中的边缘点映射到Hough空间,通过寻找交点来检测直线或曲线。
b) CHT变换:基于Hough变换的思想,通过累积直线段的交点来检测直线。
c) Snake模型:基于活动轮廓模型,通过能量最小化的方法进行边缘检测,能够较好地适应边缘的变化。
3. 基于深度学习的方法改进近年来,深度学习技术的发展为图像处理提供了新的思路。
通过利用深度神经网络,可以自动从大量的训练数据中学习到图像边缘的特征表示,从而实现更准确的边缘检测。
以下是几种基于深度学习的改进方法:a) 卷积神经网络(CNN):通过多层卷积和池化操作,对图像进行特征提取和学习,实现边缘检测。
改进的Canny图像边缘检测算法分析
网络天地171改进的Canny 图像边缘检测算法分析◆王 娟1 边缘检测的过程边缘检测主要用于解决图像边缘的真假,边缘的定向定位。
以此来初步分析图像和识别图像。
想要做好边缘检测,需要遵循以下五个方面的过程进行检测分析:(1)首先要明确的了解图像检测时图像的特性变化形式,运用合适的检测方法。
(2)根据特殊情况需求,利用多算子综合计算方法。
提取多范围的变化特性,以便检测图像上的所有特性变化。
(3)由于噪声的影响,使检测有一定的局限性。
检测时需要尽可能的滤除噪音。
还需要考虑到噪音的条件检测,进一步检测参数变化。
(4)尽可能用多种方法进行组合。
例如在检测时,先找到边缘,然后利用函数近似的放法,利用内插获得高精度定位。
(5)检测时,首先对原图像进行平滑处理,然后再进行边缘检测。
一方面可以有效地抑制噪音,另一方面也可以对边缘进行精准定位。
2 传统Canny 算子的基本工作原理由于系统固有的低筒滤波对实际的图像进行平滑,以至于边缘不明显。
所以,这就需要边缘检测通过寻找出图像局部具有最大梯度值的一些像素点。
同时由于摄影机以及周围环境的干扰,因此图片边缘检测必须满足两个条件:①逼近必须能够抑制噪音效应;②必须尽量精准的确定边缘的位置。
以高定位精准、高信噪比、单一边缘响应位判断标准。
Canny 算子的基本流程:输入原始图像→转为灰度图像→ 高斯平滑→ 梯度计算→ 非极大值抑制→ 双阈值检测→ 连接边缘→ 输出边缘图像。
作为一阶微分滤波器的Canny 算子属于边缘检测,有三大显著优点:1、最优过零点定位准则2、多峰值响应准则3、最大信噪比准则。
Canny 算子基本的工作原理首先便是利用高斯平滑滤波器对图像进行平滑处理,目的是为了去除噪音的影响,然后通过计算梯度差值,来完成领域局部强度值。
利用高阈值和低阈值以及双阈值的计算方法对图像边缘进行检测已达到增强边缘的效果。
3 Canny 算子的实现步骤Canny 算子在整体运算的过程中,其需要结合多个运算步骤进行整体的运算。
一种改进的模糊增强算法

可以对整幅 图像全局定义 ,也可以对其分块局部定义。
的参量 ( , ) , g ,全体 组成的平面即是模糊特征
平面 , g 为图像 中最大的像素值 ,其中 和 分别是指
2 图像的模糊增 强系统模型
21图像模糊增 强步骤 .
图像模 糊处理 主要有 3个步 骤 : 图像模 糊特 征提取 、
称隶属度 平面 ) ,即模糊化 ( 主要 建立在专 家经验基础之 上) 以完成编码之后 ,用适 当的模糊技术 来修正隶 属度值 , 最 后通过模糊域反变换将数据从模糊域变换到图像 的空 间 域以完成解码 。图像模 糊处理 中很大程度上取决于中间一 步, 即隶属度的修正 , 其所使用的方法可以是模糊增强算子 、 模糊聚类、模糊规则 、模糊形态学或综合的模糊方法等 同 。 现有模糊增强算 法中的核心变换 ,即非线性变换函数 存在明显的缺陷。由于该类非线性函数在变换 后其反函数 局部无解 ,导致 了图像 的部分灰度信息被丢失 ,因而影响
图像 的模 糊增强后加入平滑 ,保持 了图像细节使增强效果
得到 了提高。
征 ( 例如 ,亮度 、边缘 、平滑等 )的程度或者属于某些子 集 ( 例如 ,物体 、骨骼 、轮廓等 )的程度。换句话说 ,一
幅图像 x的模 糊子集是一个从 x到 【, ( 通模 糊集 ) (l 普 】】 或
22P l 法及 其 改 进 . a算
g =G一( ) =
- 一
1
( 5)
g 一 ( (
一1 ) )
边缘检测 。
使用文献 【】 8 提出的 “ i”或 “ x rn n ma ”算子进行边缘 由上可以看出式 ( 2)的计算量很大 ,研究中发现采用 不 同的隶 属度 函数对处理的结果并不造 成很大的影响 ,注
一种改进的边缘检测方法

K yw rs d edt t n i aepoes g ni mm n ; nst pcdf s n rg ng wn e od :eg ee i ; m g rcsi ; os j ig a i r i iui ; ei r ig co n ea oo f o o o
图像 是 生 产 和生 活 中重 要 的表 达 手 段 , 图像 可 以 为人 们 带 来 直 观 的 信 息 , 中 , 像 在 其 边 缘 中 其 图 包 含 有 大 量信 息 . 图像 的边 缘 是 图 像 局 部 特性 不 连 续 性 的反 映 J边 缘 的检 测对 于识 别 物 体 具 有 重要 , 意义 , 时 , 缘在物体之间 , 同 边 以及 物体 与 背景 之 间 有 广 泛 体 现 , 此 也 是 图 像 分 割 所 依 赖 的 重 要 因
Ab t a t d e d tc in i mp r n n i g rc s i g h s p o l m e i s o i g t os .T ov h rb e , sr c :E g e e t s i o t ti ma e p o e s ,t i r b e r man w n o n ie o a n o s l e te p o lm ma y ag r h fe g ee t n h v e n p I o e , u t sn t e fc .T e s oh n t o a e f a ior p c df — n l o i mso d ed tci a eb e r p s d b t o re t h mo t i gme h d b s d O n s t i i u t o  ̄ ii p o f so a mo t ma e t o d r s l .I h sp p r h s df s n meh d i o i e i r d t n le g ee t n in c n s oh i g s wi g o e u t h s n t i a e ,t i i u i t o s c mbn d w t t i o a d e d tci f o h a i o meh d o g ta mp o e l o i m.T e B ・ ag r h s oh s t e i g i n s t p c df so i t .t e s s t o s t e n i rv d a g rt h h E l o i m mo t e h ma e w t a ior i i u in f sl h n u e w t h o f r y n n ma i m u p e s n a d t e meh d b s d o e in g o i g t e h d e wi n a td t i .A a t o — xmu s p r s i n h to a e n r g o r w n o g tt e e g t i tc eal o h s tl s ,we u e t e s h n w meh d o h a d a e to n t e c r ic MRIa d c mp r d wi rd t n lmeh d ,a d i s o h b i u d a tg . n o a e t ta i o a t o s n t h wst e o v o s a v n a e h i
Canny边缘检测算法的一些改进
Canny边缘检测算法的⼀些改进传统的Canny边缘检测算法是⼀种有效⽽⼜相对简单的算法,可以得到很好的结果(可以参考上⼀篇)。
但是Canny算法本⾝也有⼀些缺陷,可以有改进的地⽅。
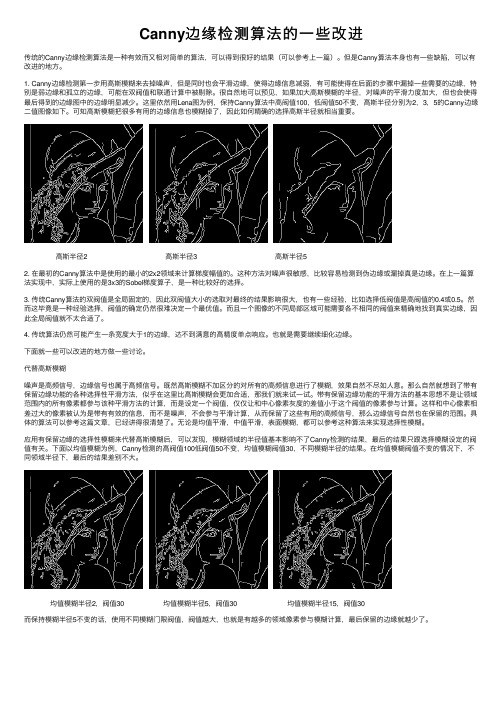
1. Canny边缘检测第⼀步⽤⾼斯模糊来去掉噪声,但是同时也会平滑边缘,使得边缘信息减弱,有可能使得在后⾯的步骤中漏掉⼀些需要的边缘,特别是弱边缘和孤⽴的边缘,可能在双阀值和联通计算中被剔除。
很⾃然地可以预见,如果加⼤⾼斯模糊的半径,对噪声的平滑⼒度加⼤,但也会使得最后得到的边缘图中的边缘明显减少。
这⾥依然⽤Lena图为例,保持Canny算法中⾼阀值100,低阀值50不变,⾼斯半径分别为2,3,5的Canny边缘⼆值图像如下。
可知⾼斯模糊把很多有⽤的边缘信息也模糊掉了,因此如何精确的选择⾼斯半径就相当重要。
⾼斯半径2 ⾼斯半径3 ⾼斯半径52. 在最初的Canny算法中是使⽤的最⼩的2x2领域来计算梯度幅值的。
这种⽅法对噪声很敏感,⽐较容易检测到伪边缘或漏掉真是边缘。
在上⼀篇算法实现中,实际上使⽤的是3x3的Sobel梯度算⼦,是⼀种⽐较好的选择。
3. 传统Canny算法的双阀值是全局固定的,因此双阀值⼤⼩的选取对最终的结果影响很⼤,也有⼀些经验,⽐如选择低阀值是⾼阀值的0.4或0.5。
然⽽这毕竟是⼀种经验选择,阀值的确定仍然很难决定⼀个最优值。
⽽且⼀个图像的不同局部区域可能需要各不相同的阀值来精确地找到真实边缘,因此全局阀值就不太合适了。
4. 传统算法仍然可能产⽣⼀条宽度⼤于1的边缘,达不到满意的⾼精度单点响应。
也就是需要继续细化边缘。
下⾯就⼀些可以改进的地⽅做⼀些讨论。
代替⾼斯模糊噪声是⾼频信号,边缘信号也属于⾼频信号。
既然⾼斯模糊不加区分的对所有的⾼频信息进⾏了模糊,效果⾃然不尽如⼈意。
那么⾃然就想到了带有保留边缘功能的各种选择性平滑⽅法,似乎在这⾥⽐⾼斯模糊会更加合适,那我们就来试⼀试。
带有保留边缘功能的平滑⽅法的基本思想不是让领域范围内的所有像素都参与该种平滑⽅法的计算,⽽是设定⼀个阀值,仅仅让和中⼼像素灰度的差值⼩于这个阀值的像素参与计算。
一种基于空域灰预测的边缘检测改进方法

类 信 息 。灰 度 或 结 构 等 信 息 的 突 变 处 称 为 边 缘 , 一 个 区 是
Byc m p rngwih t r di o a t d o a i t heta t n lmeho s,t r po e t dc n i ras h c u a ye fci ey i hep o s d meho a nc e et ea c r c fe tv l. K e wor :e e d tc in;s a ilfle ;g e r d cin;r sd a e t y ds dg ee to p ta tr r y p e i to i e i u lts
关 键 词 :边 缘 检 测 ;空 域 滤 波 ;灰 预 测 ;残 差 检 验
中图 分 类 号 :T 3 . P 91 9
文献标识码 : A
文 章 编 号 :1 7 — 2 6(0l ) 7 O 5 一 3 6 4 6 3 2 1l一 l6 o
An a a e dg e e to e ho sng s a i lg e r d c i n dv nc d e e d t ci n m t d u i p ta r y p e ito
第 1 9卷 第 1 7期
V0 .9 11
NO 1 .7
电 子 设 计 工 程
El c r n c De i n En i e rn e to i sg gn e i g
21 0 1年 9月
S p 01 e .2 1
一
种 基 于 空域 灰预 测 的 边缘检 测 改进方 法
CU — n,DA IHe l i NG h n Zeg
( l t n s nom t nsho, ot etr oy c n a nvr t, io 1 19 C i ) Ee r i fr ao ol N r w s nPlt h i l i sy X ’ 7 0 2 , hn co c I i c h e e c U ei n a
一种改进的模糊边缘检测算法
像 边缘 检测 模糊 算法 ( 简称 P 1Kig算法 )1, 次将 a. n l 首 一 模 糊集理 论 引入 到图像 的边 缘 检测 算法 中 。由 于图像 中物体边 界 所具有 的不确 定 性 往往 是模 糊性 ,因此该
摘
一
要
针 对 P 1Ki a. n g算 法 的缺 陷 ,通过 定 义新 的模 糊 隶属 函敷 .笋 引^ 饱 和 增 强点 和广 义泣 越 点 参 数 ,给 出 了
种 新 的 模 糊 迪 缘 桂 测 算 法 。谊 算 法 具 有 速 度 快 、 幕 好 、能 够 棰 洲模 糊 边 缘 和 细 小迫 孽 的优 点 ,最后 骨 形状 .且 能局 部定 义 以及 能传 递大 部分 图像信 息 等许多 优点 。因此 ,边 缘检 测可看 作 是处 理许 多复 杂 问题 的关 键 ,被广 泛应 用 于图像轮 廓 、特 征 的提取 和纹 理分析 等 方 面 。
8 0年 代 中 期 , 外 学 者 P l Kig提 出 了 一 种 图 国 a和 n
是 在 模 糊空 间 中通 过 增 强 算 子对 图 像做 模 糊增 强 处
理 ,即通 过改 变象 素来增 强边缘 两侧 象素灰度 的对 比 度 ,减少 图像灰 度层 次 。模糊增 强算 子定义 为 :
P = , 尸 ) ( I ( l P ) r = 2 3 4 … ( ) l ( ) , ,, 3
其 中, X, 0 P ≤ 1 表示 图像 象 素 (,) 有性 P/ ≤ ( ) 具
示为:
M H
属度 函数 , G和 GI包 含复杂 的 浮点运算 ;因此 , 在 1 存
一种改进的边缘检测方法
∑
( Ⅲ” ^,,)
(,) y+
: ∑ ∑ ∑∑f ( m一 - l f , ( , , ) ) ,
“ 一{ , t lP 』 t o
图 l为二 维小波变换 的方框 图 【J 】,其 中 L表 示低频 ,H表 示高 频 ,数字 l ,2表示一级或二级分 解。
Ma C ne I 2 hi nte i nc .1 2.1 ( 1l ge e 99 4 7) P71 . 0
[ ] c e n e S . m 1 i a u d m g w v 1 t e r — 2 S h u d r P A u t v l e i a e a e e r p e s n a i n b s d n mu t s a e u d m n a f r s J I E e t t o a e o l i e l f n a e t l o m [ ] E E
” Ⅵ 一 巩 ㈨
,
f , D)。 _{ V, 其中 j 是任意的开始尺度, ( , 系数是尺度 J 的f( , 的近 哪 。 x ) 似, ( , 系数是对于 工的水平 , 垂直和对角方向的细节 。有 了 和 可 通 过 离散 反 小波 得 到
,
fx ) — (, = y
图所示:
■■ ■
.
[] a l t S Z o g S C a a t r z t o f i n l f o 1M l a , h n . h r c e i a in o S g a S r m m l i c l e g S[ ] E E r n o P t e n n l S S n u t a e d e J I E T a s n a t r A a Y i a d s
应 用 技 术
一种改进的快速模糊边缘检测算法
理 的 结 果 的描 述 、 释 带 有 模 糊 性 .固 此 在 图 像 处 理 解 领 域 中 , 用 模 糊 数 学 的方 法 具 有 可行 性 、 用 性 . 运 实
其缺 陷 . 出了~种改进 的快 速模糊边 缘检测算法 . 提
1 P l 法 基本 原 理及 其缺 陷 a算
1 1 P l 法 基 本 原 理 . a 算
图像 处 理 领 域 中 , 般 认 为 胃 像 天 生 具 有 模 期 性 一
噪 、 缘 检 测 效 果 .但 它 也 存 在 一 些 缺 陷 .本 文 针 对 边
三维图像 目标投 影为二维 图像 日标 时, 有信 息的 丢失 ; 边缘 、 区域 、 纹理 等 概念 的定 义存在 模糊 性 ; 图像 处 对
Ab t a t Ed e de e to s£ v v i p t ntp tofi a e pr c s i g. By i todu i la Ki g a go ihm sr c E t cin i r m or ar m g o e sn a n r cng Pa nd n l rt 。 d e c i n, a i p ov d nd f t u z go ihm F e e de e 1o s pr po e r s f s a g ihm n e e d 1 t0 n m r e a f z y al rt O t dg t c] n i o s d hi a t l ort no t。n v sm Ptfe 0 l )e ( u[ i f( a d ( i la i g alo ihm , bu lo brn s ou l\ Pr 【 i i s c rl 【 x L lon o n 1 ac ; n Pa nd K n g r t ta s i g ta Tev
Canny算子边缘检测的一种改进方法
O s heh l a d i xe s n t te su in ta te hs ga h sm lp ek ,a e c te f oa l t eh l wi t trsod n t etni o h i a o th i orm a uI l pa scn sl t h a rbe h sod t u s o tt h t ie e v r h
ri t e e e te t a d a n h dg sr ng h n deal. e a tr s l afe t t e  ̄e t o h f k e ge a d h e oni ui of t e e le e . t isTh lg h e hod f cs h s ng h f te a e d s n t c tn t y r a dg s h
摘
要 : 统C n y算子在 高斯滤波方 差和 滞后 阈值 的选择上 需要人 工干预 , 传 an 不具备 自适应 能力。高斯滤波方差的 大小选择会
影 响到去噪和边缘保持效果 , 用不 同尺度 的形态学滤波代 替 高斯滤波 , 不仅能 降低噪 声影响 , 而且 可保持边缘 强度和 细节 ; 滞后
Emn l a O
W A NG Zuo ch ng, U X i o dong, UE Lixi I pr ve — e LI a— X - a.m o d m e ho t d o a f C nny pe a or d de e ton. o r t e ge t ci Com put r Engne r e i e-
重庆 邮电大学 计算机 学院 , 重庆 4 0 6 0 05
Co u e l g f Ch n q n i e st f P ss a d T lc mmu i ai n , o g i g 4 0 6 Ch a mp t r Col e o o g i g Un v ri o o t n ee o e y n c to s Ch n q n 0 0 5, i n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
像总均值。
最后根据遗传算法的收敛定理, 赌轮法进行个
体选择。交叉概率设为 0. 75, 变异概率设为 0. 08。
算法执行到设定的最大代数时停止运行, 具有最高
适应度值的个体即为最佳分割阈值 T。
( 2)定义简单的隶属函数
本文定义的隶属函数如下:
1 xmn - xm in 2
mn = G (xmn ) =
糊增强处理, 以增强边缘两侧像素灰度的对比度; 接 着再对模糊隶属度矩阵进行相应的逆变换, 将增强
后的图像由模糊空间变回数据空间; 最后提取出图 像边缘 [ 8] 。
P a.l K ing算法首 先将待处理的图像 X, 利用隶
属度函数 G, 映射成一个模糊隶属度矩阵。将一个 具有 L 个灰度级的 M ∀N 的的二维灰度图像表示成
第 40卷amp; IN FRARED
V o .l 40, N o. 12 D ecem ber, 2010
文章编号: 1001 5078( 2010) 12 1374 04
图像与信号处理
一种改进的模糊边缘检测算法
吴德刚 1, 张宇波1, 曹立波 2
首先确定 遗传 编码方 法, 由 于图 像灰 度值 在 0~ 255之间, 阈值作为一 个染色体, 对图像 灰度值
进行 8位二进制编码。
其次产生初始种群, 群体个数为 20个, 最大繁 衍代数为 30代。
接着确定适应度函数, 对于单阈值方法, 采用式
( 7)如下所示:
g(k) =w1( 1- )2+w2 ( 2- )2
度值属于 [ 0, 1], 从而保证了图像所有的灰度信息 都能进行模糊增强。
( 3)对图像进行模糊增强
采用的增强算子如下:
∃mn =
2( mn ) 2 mn 1- 2( 1- mn ) 2
0& m n & c c < mn& 1
( 1. Zheng zhou U n iversity, Zhengzhou 450001, Ch ina; 2. Luoyang H eng ruiM easurem ent& Contro lT echnology Co. , L td, Luoyang 471000, China)
Ab stract: O n the basis o f comprehens ive analysis about lim itations o f Pa .l K ing a lgor ithm, an improved a lgo rithm o f fuzzy edge de tection is presented. A lso proposed is a new me thod based on genetic a lgo rithm to de term ine the optim al thresho ld o f the m em bersh ip grade. T he simp le m em be rsh ip function proposed in the paper sim plifies the comp lex transfo rma tion ca lculation in P a.l K ing a lgo rithm. In orde r to ob tain the desired e ffect, the c va lue is optim ized acco rd ing to the requ irement. The edges of the im age are ex tracted accord ing to a ru le com bining the M ax! and M in! op erators. S im ulation results show that w ith the propo sed a lgo rithm the quality of edge detection is large ly im proved and the com putation o f the algor ithm is faster than that of Pa .l K ing a lgor ithm. K ey w ords: edge de tection; fuzzy; segm enta tion thresho ld; m embersh ip function
法边缘检测质量得到了很大改善, 运算速度得到了显著提高。
关键词: 边缘检测; 模糊; 阈值分割; 隶属度函数
中图分类号: TN391. 4
文献标识码: A
Improved algorithm of fuzzy edge detection
WU D e gang1, ZHANG Y u bo1, CAO L i bo2
其 中, xmn 表 示 图 像 像 素 (m, n ) 的 灰 度 值, X = m ax (xmn )。
此改进算法由于引进了线性简单隶属度函数,
快速地完成了图像到隶属度函数矩阵的变换和隶属
度函数矩阵到图像的逆变换。但此算法经模糊增强
迭代后, 图像各区域之间的层次模糊, 边缘检测质量
较差。
文献 [ 3]在 P a.l K ing算法中提出了阈值分割思 想, 并使用最大类间差法获得最佳分割阈值, 此外还
1引 言 图像最基本的特征是边缘, 所谓边缘是指图像
局部亮度变化最显著的部分。由于边缘能够勾画出
区域的轮廓、形状, 能传递出大部分图像信息, 因此 边缘检测是图像分析中最重要的内容, 但也是迄今 为止仍没有得到圆满解决的一类问题 [ 1] 。
传 统的 边缘 检测 算法有 差分 算 子法 、Sob el算子 法、R oberts算子法、Canny算子法等 [ 2 ] , 但由于实际 中遇到的图像常常具有模糊性, 因此这些边缘检测 算法的效果都不是很理想。针对边缘的不确定性, 20世纪 80年代中期, 国外学者 Pa l和 K ing提出了 一种模糊边缘检测算法 [ 3] , 由于该算法首次引入了 模糊集理论, 检测效果优异, 因此在图像处理中 ( 尤
一个模糊集, 记为:
MN
X= # m= 1
#
n= 1
mn
/xm n
( 1)
其中, mn /xmn表示图像像素 (m, n )相对于某个特定
灰度级 X k 的隶属度, 通常 X k 为最大灰度级 Xmax。
P a.l K ing算法定义的隶属函数为:
mn = G ( xmn ) =
1+ X max - xmn - F e Fd
( 7)
其中, k为某一灰度, 将图像所有像素分成 c1 和 c2;
c1 包含了 i& k 的像素; c2 包含了 i > k 的像素; w1 为
c1 出现的概率; w 2 为 c2 出现的概率; 1 为 c1 类的平
均灰度值; 2 为 c2 类的平均灰度值; 为图像总均
值, w1 1 + w 2 2 = 。
以上文献 [ 2]、[ 3] 的改进算法, 只适用于处理
简单图像或对比度比较高的图像, 对一些复杂图像 或低对 比 度图 像进 行 边缘 检 测难 以 获 得良 好 的
效果。
3 改进的 P a.l K ing算法
针对 P a.l K ing算法的不足及文献 [ 2]、[ 3]的改
进算法缺陷, 本文提出了一种改进的模糊边缘检测 算法。该改进算法的基本思想是首先利用遗传算法
主要缺点是: 采用复杂的幂函数作为模糊隶属度函
数, 使得变换及矩阵求逆运算量较大, 运算速度较慢。
其中文献 [ 2] 对 Pa.l K ing 提出的方法进行了改 进, 提出了一个简单线性函数来代替复杂的隶属度
函数。该线性函数如式 ( 5) 所示:
mn
=G
( xmn )
=
xm n (X - 1)
( 5)
( 1. 郑州大学, 河南 郑州 450001; 2. 洛阳恒锐测控科技有限公司, 河南 洛阳 471000)
摘 要: 在全面分析 P a.l K ing模糊边缘检测算法的基础上, 针对已有算法存在的缺陷, 提出了
一种改进的模糊边缘检测算法。该算法给出了利用遗传算法确定最佳隶属度阈值的方法, 采
用简单的隶属函数, 简化了 Pa.l K ing 复杂的变换和逆变换, 根据需要对 c 进行优化处理, 较快 获取理想效果, 将 M ax!和 M in!算子结合起来提取图像边缘。仿真结果表明, 采用改进的方
2 T - xm in 1 - 1 xm in - xmax 2
2 T - xm ax
xm in & xmn & T T < xmn & xmax
( 9)
其中, mn为模糊隶属度值; xm in为最小灰度级; xmax为 最大灰度级。根 据上 式分析, 当 xm in & xmn & T 时,
mn 属 于 [ 0, 0. 5 ], 当 T < xmn & xmax 时, mn 属 于 ( 0. 5, 1), 两部分区域合并可得到整 幅图像的隶属
激 光 与 红 外 N o. 12 2010
吴德刚等 一种改进的模糊边缘检测算法
1375
标从背景中分离出来。实际中遇到的图像常常是模
糊、边缘不清晰的, 采用 Pa.l K ing算 法相对于传统 的空域微分算法有着较好的抑噪、边缘检测效果。
P a.l K ing算法的基本思想是首先利用隶属度函
数将图像从空间域映射到模糊特征域; 然后进行模
选取图像背景与目标的最佳分割阈值 T; 然后根据
分割阈值 T, 定义新的隶属函数; 再用增强算子对图 像进行模糊增强, 其中对 c 值作了优化改进; 最后 将 M ax!和 M in!算子结合起来提取图像 的边缘。