MATLAB仿真课后习题答案
控制系统的MATLAB仿真与设计课后答案
控制系统的MATLAB仿真与设计课后答案>>z=-4*sqrt(2)*sin(t);>>plot3(x,y,z,'p');>>title('Line in 3-D Space');>>text(0,0,0,'origin');>>xlabel('X'),ylable('Y'),zlable('Z');grid;4>>theta=0:0.01:2*pi;>>rho=sin(2*theta).*cos(2*theta);>>polar(theta,rho,'k');5>>[x,y,z]=sphere(20);>>z1=z;>>z1(:,1:4)=NaN;>>c1=ones(size(z1));>>surf(3*x,3*y,3*z1,c1);>>hold on>>z2=z;>>c2=2*ones(size(z2));>>c2(:,1:4)=3*ones(size(c2(:,1:4)));>>surf(1.5*x,1.5*y,1.5*z2,c2);>>colormap([0,1,0;0.5,0,0;1,0,0]);>>grid on>>hold off第四章1>>for m=100:999m1=fix(m/100);m2=rem(fix(m/10),10);m3=rem(m,10);if m==m1*m1*m1+m2*m2*m2+m3*m3*m3disp(m)endend2M文件:function[s,p]=fcircle(r)s=pi*r*r;p=2*pi*r;主程序:[s,p]=fcircle(10)3>>y=0;n=100;for i=1:ny=y+1/i/i;end>>yfunction f=factor(n)if n<=1f=1;elsef=factor(n-1)*n;end主程序:>>s=0;for i=1:5s=s+factor(i);end>>s5>>sum=0;i=1;while sum<2000sum=sum+i;i=i+1;end;>>n=i-26for循环M文件:function k=jcsum(n)k=0;for i=0:nk=k+2^i;end主程序:>>jcsum(63)While循环M文件:function k=jcsum1(n)k=0;i=0;while i<=nk=k+2^i;i=i+1;end主程序:>>jcsum1(63)第五章1>>A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4]; >>b=[13,-9,6,0]';>>x=A\bfunction f=fxyz(u)x=u(1);y=u(2);z=u(3);f=x+y.^2./x/4+z.^2./y+2./z;主程序:[U,fmin]=fminsearch('fxyz',[0.5,0.5,0.5])3>>X=linspace(0,2*pi,50);>>Y=sin(X);>>P=polyfit(X,Y,3)>>AX=linspace(0,2*pi,50);>>Y=sin(X);>>Y1=polyval(P,X)>>plot(X,Y,':O',X,Y1,'-*')4>>x=0:2.5:10;>>h=[0:30:60]';>>T=[95,14,0,0,0;88,48,32,12,6;67,64,54,48,41]; >>xi=[0:0.5:10];>>hi=[0:10:60]';>>temps=interp2(x,h,T,xi,hi,'cubic');>>mesh(xi,hi,temps);第六章1>>syms x>>y=finverse(1/tan(x))2>>syms x y>>f=1/(1+x^2); g=sin(y);>>fg=compose(f,g)3>>syms x>>g=(exp(x)+x*sin(x))^(1/2);>>dg=diff(g)4>>F=int(int('x*exp(-x*y)','x'),'y')5>>syms x>>F=ztrans(x*exp(-x*10))6>>a=[0 1;-2 -3];>>syms s>>inv(s*eye(2)-a);7>>f=solve('a*x^2+b*x+c')8>>f=solve('x+y+z=1','x-y+z=2','2*x-y-z=1')9>>y=dsolve('D2y+2*Dy+2*y=0','y(0)=1','Dy(0)=0') >>ezplot(y),grid on10>>a=maple('simplify(sin(x)^2+cos(x)^2);')11>>f=maple('laplace(exp(-3*t)*sin(t),t,s);')12>>syms t x>>F=sin(x*t+2*t); >>L=laplace(F)第七章1234 56 7第八章1-1>>h=tf([5,0],[1,2,2])1-2>>s = tf('s');>>H = [5/(s^2+2*s+2) ];>>H.inputdelay =21-3>>h=tf([0.5,0],[1,-0.5,0.5],0.1) 2>>num=2*[1,0.5];den=[1,0.2,1.01]; >>sys=tf(num,den)>>[z,p,k]=tf2zp(num,den);>>zpk(z,p,k)>>[A,B,C,D]=tf2ss(num,den);>>ss(A,B,C,D)3 >>num=[1,5]; den=[1,6,5,1]; ts=0.1; >>sysc=tf(num,den); >>sysd=c2d(sysc,ts,'tustin')4>>r1=1;r2=2;c1=3;c2=4;>>[A,B,C,D]=linmod('x84');>>[num,den]=ss2tf(A,B,C,D);>>sys=tf(num,den)5>>A=[1,1,0;0,1,0;0,0,2];B=[0,0;1,0;0,-2]; >>n=size(A)>>Tc=ctrb(A,B);if n==rank(Tc)disp('系统完全能控');elsedisp('系统不完全能控');end第九章1>>num=[2,5,1];den=[1,2,3];>>bode(num,den);grid on ;>>figure;>>nyquist(num,den);2>>num=5*[1,5,6];den=[1,6,10,8];>>step(num,den);grid on ;>>figure;>>impulse(num,den);grid on ;3>>kosi=0.7;wn=6;>>num=wn^2;den=[1,2*kosi*wn,wn^2];>>step(num,den);grid on ;>>figure;>>impulse(num,den);grid on ;4 M文件:function [rtab,info]=routh(den)info=[];vec1=den(1:2:length(den)); nrT=length(vec1);vec2=den(2:2:length(den)-1);rtab=[vec1; vec2, zeros(1,nrT-length(vec2))];for k=1:length(den)-2,alpha(k)=vec1(1)/vec2(1);for i=1:length(vec2),a3(i)=rtab(k,i+1)-alpha(k)*rtab(k+1,i+1);endif sum(abs(a3))==0a3=polyder(vec2);info=[info,'All elements in row ',...int2str(k+2) ' are zeros;'];elseif abs(a3(1))<epsa3(1)=1e-6;info=[info,'Replaced first element;'];endrtab=[rtab; a3, zeros(1,nrT-length(a3))];vec1=vec2; vec2=a3;end主程序:>>den=[1,2,8,12,20,16,16];>>[rtab,info]=routh(den)>>a=rtab(:,1)if all(a>0)disp('系统是稳定的');elsedisp('系统是不稳定的');end5>>num=7*[1,5];den=conv([1,0,0],conv([1,10],[1,1])); >>[gm,pm,wg,wc]=margin(num,den)第十章1 M文件:function varargout=rg_lead(ng0,dg0,s1)if nargout==1ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=ngv/dgv;thetal=pi-angle(g);zc=real(s1)-imag(s1)/tan(thetal);t=-1/zc;varargout{1}=[t,1];elseif nargout==2ngv=polyval(ng0,s1); dgv=polyval(dg0,s1);g=ngv/dgv; theta=angle(g); phi=angle(s1);if theta>0phi_c=pi-theta;endif theta<0;phi_c=-thetaendtheta_z=(phi+phi_c)/2; theta_p=(phi-phi_c)/2;z_c=real(s1)-imag(s1)/tan(theta_z);p_c=real(s1)-imag(s1)/tan(theta_p);nk=[1 -z_c]; varargout{2}=[1 -p_c]; kc=abs(p_c/z_c);if theta<0kc=-kcendvarargout{1}=kc*nk;elseerror('输出变量数目不正确!');end主程序:>> ng0=[1]; dg0=10000*[1 0 -1.1772];>>g0=tf(ng0,dg0); %满足开环增益的为校正系统的传递函数>>s=kw2s(0.7,0.5) %期望的闭环主导极点>>ngc=rg_lead(ng0,dg0,s);>>gc=tf(ngc,1)>>g0c=tf(g0*gc);>>rlocus(g0,g0c);>>b1=feedback(g0,1); %未校正系统的闭环传递函数>>b2=feedback(g0c,1); %校正后系统的闭环传递函数>>figure,step(b1,'r--',b2,'b'); grid on%绘2M文件:function [ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a)ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=dgv/ngv;k=abs(g); %期望主导极点处的根轨迹增益beta=k/KK;[kosi1,wn1]=s2kw(s1);zc=-wn1*sin(a*pi/180)/sin(pi-atan(sqrt(1-kosi1^2)/kosi1)-(a*pi/180)) ; %利用正弦定理pc=beta*zc;ngc=beta*[1,-zc];dgc=[1,-pc];主程序:>>KK=20;s1=-2+i*sqrt(6);a=1>>ng0=[10];dg0=conv([1,0],[1,4]);>>g0=tf(ng0,dg0);>>[ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a); >>gc=tf(ngc,dgc) >>g0c=tf(KK*g0*gc);>>b1=feedback(k*g0,1); >>b2=feedback(g0c,1); >>step(b1,'r--',b2,'b');grid on3M文件:function [ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a)ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=dgv/ngv;k=abs(g); %期望主导极点处的根轨迹增益beta=k/KK;[kosi1,wn1]=s2kw(s1);zc=-wn1*sin(a*pi/180)/sin(pi-atan(sqrt(1-kosi1^2)/kosi1)-(a*pi/180)); %利用正弦定理pc=beta*zc;ngc=beta*[1,-zc];dgc=[1,-pc];主程序:>>KK=128;s1=-2+i*2*sqrt(3);a=2>>ng0=[10];dg0=conv([1,0],conv([1,2],[1,8]));>>g0=tf(ng0,dg0);>>[ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a); >>gc=tf(ngc,dgc) >>g0c=tf(KK*g0*gc);>>rlocus(g0,g0c);>>b1=feedback(k*g0,1); >>b2=feedback(g0c,1); >>figure,step(b1,'r--',b2,'b');grid on4M文件:function [ngc,dgc]=lead4(ng0,dg0,KK,Pm,w)[mu,pu]=bode(KK*ng0,dg0,w); [gm,pm,wcg,wcp]=margin(mu,pu,w);alf=ceil(Pm-pm+5); phi=(alf)*pi/180;a=(1+sin(phi))/(1-sin(phi)), dbmu=20*log10(mu);mm=-10*log10(a);wgc=spline(dbmu,w,mm), T=1/(wgc*sqrt(a)),ngc=[a*T,1]; dgc=[T,1];主程序:>>ng0=[1];dg0=conv([1,0,0],[1,5]);>>g0=tf(ng0,dg0);>>w=logspace(-3,3);>>KK=1;Pm=50;>>[ngc,dgc]=lead4(ng0,dg0,KK,Pm,w);>>gc=tf(ngc,dgc);g0c=tf(KK*g0*gc);>>bode(KK*g0,w);hold on,bode(g0c,w);grid on,hold off>>[gm,pm,wcg,wcp]=margin(g0c)>>Kg=20*log10(gm)>>g1=feedback(g0c,1);>>bode(g1),grid on,>>[mag,phase,w]=bode(g1);>>a=find(mag<=0.707*mag(1));>>wb=w(a(1))>>max(mag)>>b=find(mag==max(mag))>>wr=w(b)5M文件:function [ngc,dgc]=fg_lead_pm(ng0,dg0,Pm,w)[mu,pu]=bode(ng0,dg0,w); %计算原系统的对数频率响应数据[gm,pm,wcg,wcp]=margin(mu,pu,w); %求取原系统的相角裕度和剪切频率alf=ceil(Pm-pm+5); %计算控制器提供的最大超前角度,phi=(alf)*pi/180; %将最大超前角转换为弧度单位a=(1+sin(phi))/(1-sin(phi)); %计算a值dbmu=20*log10(mu); %系统的对数幅值mm=-10*log10(a); %wm处的控制器对数幅值wgc=spline(dbmu,w,mm); %差值求取wm,认为wm=wc T=1/(wgc*sqrt(a)); %计算Tngc=[a*T,1]; dgc=[T,1];主程序:>>KK=40; Pm=50;>>ng0= KK *[1]; dg0=conv([1,0],conv([1,1],[1,4]));>>g0=tf(ng0,dg0) ;>>w=logspace(-2,4);>>[ngc,dgc]=fg_lead_pm(ng0,dg0,Pm,w)>>gc=tf(ngc,dgc),g0c=tf(g0*gc);>>b1=feedback(g0,1); b2=feedback(g0c,1);>>step(b1,'r--', b2,'b'); grid on>>figure, bode(g0,'r--',g0c,'b',w), grid on,>>[gm,pm,wcg,wcp]=margin(g0c), Km=20*log10(gm)。
MATLAB语言与控制系统仿真-参考答案-第7章
7.3控制系统根轨迹分析MATLAB 仿真实训7.3.1实训目的1. 掌握运用MATLAB 绘制180度、0度根轨迹图的编程方法;2. 学会通过根轨迹图获取相关信息的方法;3. 利用仿真结果对系统根轨迹进行分析;4.学会通过根轨迹图分析和解决一些实际问题。
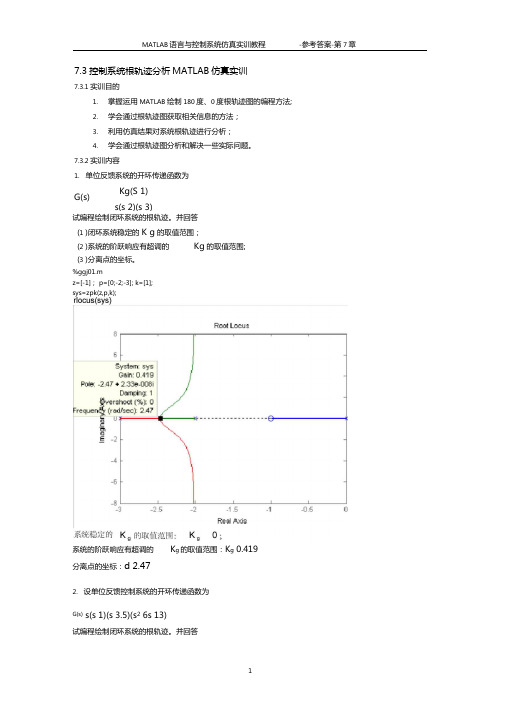
7.3.2实训内容1. 单位反馈系统的开环传递函数为试编程绘制闭环系统的根轨迹。
并回答 (1 )闭环系统稳定的 K g 的取值范围; (2 )系统的阶跃响应有超调的 Kg 的取值范围;(3 )分离点的坐标。
%ggj01.mz=[-1]; p=[0;-2;-3]; k=[1]; sys=zpk(z,p,k);系统的阶跃响应有超调的 K g 的取值范围:K g 0.419分离点的坐标:d 2.472. 设单位反馈控制系统的开环传递函数为G(s) s(s 1)(s 3.5)(s 2 6s 13)试编程绘制闭环系统的根轨迹。
并回答G(s)Kg(S 1) s(s 2)(s 3)(1 )闭环系统稳定的K的取值范围;(2) 根轨迹与虚轴的交点坐标; (3) 分离点的坐标。
ggj02.m%根轨迹仿真实训第 2题 n=1;d=co nv([1,0],co nv([1,1],co nv([1,3.5],[1,6,13]))); rlocus( n,d)10 -s由图上数据可知:闭环系统稳定的 K 的取值范围:0 K 70.9 ; 根轨迹与虚轴的交点坐标:j1.02 ;分离点的坐标:d 0.403。
3. 设单位反馈控制系统的开环传递函数为KG(s)- s(s 4)( s 4s 20)试编程绘制闭环系统的根轨迹。
并回答 (1 )闭环系统稳定的K 的取值范围;(2) 根轨迹与虚轴的交点坐标; (3) 各个分离点的坐标。
%根轨迹仿真实训第 3题Root Locus640 ■2-10-40 2斗6Real AxisDaimninn- -Fl IT10125System 割g j : i go^ainc £4祁怎比〕:3.15Pole : -2 + 7.51e-D06i Damping: 1 Overshoot (%): 0 Frequency (racVsec): 2由图上数据可知:闭环系统稳定的 K 的取值范围:0 K 262 ; 根轨迹与虚轴的交点坐标:j3.18 ;分离点的坐标:d,2,d 2,32 j2.45。
MATLAB课后习题集附标准答案
第2章MATLAB概论1、与其他计算机语言相比较,MA TLAB语言突出的特点是什么?答:起点高、人机界面适合科技人员、强大而简易的作图功能、智能化程度高、功能丰富,可扩展性强.2、MA TLAB系统由那些部分组成?答:开发环境、MATLAB数学函数库、MATLAB语言、图形功能、应用程序接口3、安装MATLAB时,在选择组件窗口中哪些部分必须勾选,没有勾选的部分以后如何补安装?答:在安装MATLAB时,安装内容由选择组件窗口中各复选框是否被勾选来决定,可以根据自己的需要选择安装内容,但基本平台(即MATLAB选项)必须安装.第一次安装没有选择的内容在补安装时只需按照安装的过程进行,只是在选择组件时只勾选要补装的组件或工具箱即可.4、MATLAB操作桌面有几个窗口?如何使某个窗口脱离桌面成为独立窗口?又如何将脱离出去的窗口重新放置到桌面上?答:在MATLAB操作桌面上有五个窗口,在每个窗口的右下角有两个小按钮,一个是关闭窗口的Close 按钮,一个是可以使窗口称为独立的Undock按钮,点击Undock按钮就可以使该窗口脱离桌面称为独立窗口,在独立窗口的view菜单中选择Dock,菜单项就可以将独立的窗口重新防止的桌面上.5、如何启动M文件编辑/调试器?答:在操作桌面上选择“建立新文件”或“打开文件”操作时,M文件编辑/调试器将被启动.在命令窗口中键入edit命令时也可以启动M文件编辑/调试器.6、存储在工作空间中的数组能编辑吗?如何操作?答:存储在工作空间的数组可以通过数组编辑器进行编辑:在工作空间浏览器中双击要编辑的数组名打开数组编辑器,再选中要修改的数据单元,输入修改内容即可.7、命令历史窗口除了可以观察前面键入的命令外,还有什么用途?答:命令历史窗口除了用于查询以前键入的命令外,还可以直接执行命令历史窗口中选定的内容、将选定的内容拷贝到剪贴板中、将选定内容直接拷贝到M文件中.8、如何设置当前目录和搜索路径,在当前目录上的文件和在搜索路径上的文件有什么区别?答:当前目录可以在当前目录浏览器窗口左上方的输入栏中设置,搜索路径可以通过选择操作桌面的file菜单中的Set Path菜单项来完成.在没有特别说明的情况下,只有当前目录和搜索路径上的函数和文件能够被MATLAB运行和调用,如果在当前目录上有与搜索路径上相同文件名的文件时则优先执行当前目录上的文件,如果没有特别说明,数据文件将存储在当前目录上.9、在MA TLAB中有几种获得帮助的途径?答:(1)帮助浏览器:选择view菜单中的Help菜单项或选择Help菜单中的MATLAB Help菜单项可以打开帮助浏览器.(2)help命令:在命令窗口键入“help”命令可以列出帮助主题,键入“help 函数名”可以得到指定函数的在线帮助信息.(3)lookfor命令:在命令窗口键入“lookfor 关键词”可以搜索出一系列与给定关键词相关的命令和函数.(4)模糊查询:输入命令的前几个字母,然后按Tab键,就可以列出所有以这几个字母开始的命令和函数.注意:lookfor和模糊查询查到的不是详细信息,通常还需要在确定了具体函数名称后用help命令显示详细信息.第3章 MATLAB 数值运算3.1在MA TLAB 中如何建立矩阵⎥⎦⎤⎢⎣⎡194375,并将其赋予变量a ? 答:在Command Window 窗口输入操作:>> a=[5 7 3;4 9 1]3.2有几种建立矩阵的方法?各有什么优点? 答:(1)直接输入法,如a=[1 2 3 4],优点是输入方法方便简捷;(2)通过M 文件建立矩阵,该方法适用于建立尺寸较大的矩阵,并且易于修改; (3)由函数建立,如y=sin(x),可以由MATLAB 的内部函数建立一些特殊矩阵; (4)通过数据文件建立,该方法可以调用由其他软件产生数据.3.3在进行算术运算时,数组运算和矩阵运算各有什么要求?答:进行数组运算的两个数组必须有相同的尺寸.进行矩阵运算的两个矩阵必须满足矩阵运算规则,如矩阵a 与b 相乘(a*b )时必须满足a 的列数等于b 的行数.渗釤呛俨匀谔鱉调硯錦。
控制系统的MATLAB仿真与设计课后答案
控制系统的MATLAB 仿真与设计课后答案第二章1>>x=[15 22 33 94 85 77 60]>>x(6)>>x([1 3 5])>>x(4:end)>>x(find(x>70))2>>T=[1 -2 3 -4 2 -3] ;>>n=length(T);>>TT=T';>>for k=n-1:-1:0>>B(:,n-k)=TT.^k;>>end>>B>>test=vander(T)3>>A=zeros(2,5);>>A(:)=-4:5>>L=abs(A)>3>>islogical(L)>>X=A(L)4>>A=[4,15,-45,10,6;56,0,17,-45,0] >>find(A>=10&A<=20)5>>p1=conv([1,0,2],conv([1,4],[1,1]));>>p2=[1 0 1 1];>>[q,r]=deconv(p1,p2);>>cq='商多项式为 '; cr='余多项式为 ';>>disp([cq,poly2str(q,'s')]),disp([cr,poly2str(r,'s')]) 6>>A=[11 12 13;14 15 16;17 18 19];>>PA=poly(A)>>PPA=poly2str(PA,'s')第三章1>>n=(-10:10)';>>y=abs(n);>>plot(n,y,'r.','MarkerSize',20)>>axis equal>>grid on>>xlabel('n')2>>x=0:pi/100:2*pi;>>y=2*exp(-0.5*x).*sin(2*pi*x);>>plot(x,y),grid on;3>>t=0:pi/50:2*pi;>>x=8*cos(t);>>y=4*sqrt(2)*sin(t);>>z=-4*sqrt(2)*sin(t);>>plot3(x,y,z,'p');>>title('Line in 3-D Space');>>text(0,0,0,'origin');>>xlabel('X'),ylable('Y'),zlable('Z');grid;4>>theta=0:0.01:2*pi;>>rho=sin(2*theta).*cos(2*theta); >>polar(theta,rho,'k');5>>[x,y,z]=sphere(20);>>z1=z;>>z1(:,1:4)=NaN;>>c1=ones(size(z1));>>surf(3*x,3*y,3*z1,c1);>>hold on>>z2=z;>>c2=2*ones(size(z2));>>c2(:,1:4)=3*ones(size(c2(:,1:4))); >>surf(1.5*x,1.5*y,1.5*z2,c2);>>colormap([0,1,0;0.5,0,0;1,0,0]); >>grid on>>hold off第四章1>>for m=100:999m1=fix(m/100);m2=rem(fix(m/10),10);m3=rem(m,10);if m==m1*m1*m1+m2*m2*m2+m3*m3*m3 disp(m)endend2M文件:function[s,p]=fcircle(r)s=pi*r*r;p=2*pi*r;主程序:[s,p]=fcircle(10)3>>y=0;n=100;for i=1:ny=y+1/i/i;end>>y4 M文件:function f=factor(n)if n<=1f=1;elsef=factor(n-1)*n; end主程序:>>s=0;for i=1:5s=s+factor(i);end>>s5>>sum=0;i=1;while sum<sum=sum+i;i=i+1;end;>>n=i-26for循环M文件:function k=jcsum(n) k=0;for i=0:nk=k+2^i;end主程序:>>jcsum(63)While循环M文件:function k=jcsum1(n)k=0;i=0;while i<=nk=k+2^i;i=i+1;end主程序:>>jcsum1(63)第五章1>>A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4]; >>b=[13,-9,6,0]';>>x=A\b2M文件:function f=fxyz(u)x=u(1);y=u(2);z=u(3);f=x+y.^2./x/4+z.^2./y+2./z;主程序:[U,fmin]=fminsearch('fxyz',[0.5,0.5,0.5]) 3>>X=linspace(0,2*pi,50);。
matlab课后习题答案(附图)

matlab课后习题答案(附图)习题2.1画出下列常见曲线的图形y (1)⽴⽅抛物线3x命令:syms x y;ezplot('x.^(1/3)')(2)⾼斯曲线y=e^(-X^2);命令:clearsyms x y;ezplot('exp(-x*x)')(3)笛卡尔曲线命令:>> clear>> syms x y;>> a=1;>> ezplot(x^3+y^3-3*a*x*y)(4)蔓叶线命令:>> clear>> syms x y;>> a=1ezplot(y^2-(x^3)/(a-x))(5)摆线:()()tsin-=,=-by1命令:>> clear>> t=0:0.1:2*pi;>> x=t-sin(t);>>y=2*(1-cos(t)); >> plot(x,y)7螺旋线命令:>> clear >> t=0:0.1:2*pi; >> x=cos(t); >> y=sin(t); >> z=t;>>plot3(x,y,z)(8)阿基⽶德螺线命令:clear>> theta=0:0.1:2*pi;>> rho1=(theta);>> subplot(1,2,1),polar(theta,rho1)(9) 对数螺线命令:cleartheta=0:0.1:2*pi;rho1=exp(theta);subplot(1,2,1),polar(theta,rho1)(12)⼼形线命令:>> clear >> theta=0:0.1:2*pi; >> rho1=1+cos(theta); >> subplot(1,2,1),polar(theta,rho1)练习2.21. 求出下列极限值(1)nnn n3→命令:>>syms n>>limit((n^3+3^n)^(1/n)) ans = 3(2))121(lim n n n n ++-+∞→命令:>>syms n>>limit((n+2)^(1/2)-2*(n+1)^(1/2)+n^(1/2),n,inf) ans = 0(3)x x x 2cot lim 0→命令:syms x ;>> limit(x*cot(2*x),x,0) ans = 1/2 (4))(coslimcm xx ∞→命令:syms x m ; limit((cos(m/x))^x,x,inf) ans = 1(5))111(lim 1--→exx x命令:syms x>> limit(1/x-1/(exp(x)-1),x,1) ans =(exp(1)-2)/(exp(1)-1) (6))(2lim x x xx -+∞>> limit((x^2+x)^(1/2)-x,x,inf)ans = 1/2练习2.41. 求下列不定积分,并⽤diff 验证:(1)+x dxcos 1>>Clear >> syms x y >> y=1/(1+cos(x)); >> f=int(y,x) f =tan(1/2*x) >> y=tan(1/2*x); >> yx=diff(y ,x); >> y1=simple(yx) y1 =1/2+1/2*tan(1/2*x)^2 (2)+exdx1clear syms x yy=1/(1+exp(x));f=int(y,x) f =-log(1+exp(x))+log(exp(x)) syms x yy=-log(1+exp(x))+log(exp(x)); yx=diff(y,x); y1=simple(yx) y1 = 1/(1+exp(x)) (3)dx x x ?sin 2syms x yy=x*sin(x)^2; >> f=int(y,x) f =x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2 clearsyms x y y=x*(-1/2*cos(x)*sin(x)+1/2*x)-1/4*cos(x)^2-1/4*x^2; yx=diff(y,x); >> y1=simple(yx) y1 = x*sin(x)^2 (4)xdx ?sec3syms x y y=sec(x)^3;f=int(y,x) f =1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)) clear syms x yy=1/2/cos(x)^2*sin(x)+1/2*log(sec(x)+tan(x)); yx=diff(y,x); y1=simple(yx) y1 =1/cos(x)^32. 求下列积分的数值解 1)dx x-10clearsyms xy=int(x^(-x),x,0,1) y =int(x^(-x),x = 0 .. 1) vpa(y,10) ans =1.291285997 2)xdx e x cos3202?πclearsyms xy=int(exp(2*x)*cos(x)^3,x, clear syms xy=int((1/(2*pi)^(1/2))*exp(-x^2/2),x,0,1) y =7186705221432913/36028797018963968*erf(1/2*2^(1/2))*2^(1/2)*pi^(1/0,2*pi) y =22/65*exp(pi)^4-22/65vpa(ans,10)(3)dx xe21221-π>> clear >> syms x>> y=int(1/(2*pi)^(1/2)*exp(-x^2/2),0,1); >> vpa(y,14) ans =.341344746068552(4)>> clear >> syms x>> y=int(x*log(x^4)*asin(1/x^2),1,3); Warning: Explicit integral could not be found. > In sym.int at 58 >> vpa(y,14) ans = 2.45977212823752(5) >> clear >> syms x1判断下列级数的收敛性,若收敛,求出其收敛值。
Matlab与控制系统仿真部分习题答案
【4.2】程序:num=[5,0];den=conv([1,1],conv([1,2],[1,3])); [numc,denc]=cloop(num,den);[z,p,k]=tf2zp(numc,denc);[A,B,C,D]=tf2ss(numc,denc);g_zp=zpk(z,p,k)g_tf=tf(numc,denc)g_ss=ss(A,B,C,D)运行结果:Zero/pole/gain:5 s----------------------------------(s+0.4432) (s^2 + 5.557s + 13.54)Transfer function:5 s----------------------s^3 + 6 s^2 + 16 s + 6a =x1 x2 x3x1 -6 -16 -6x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 5 0d =u1y1 0【4.3】程序:A=[0 0 0 -1;1 0 0 -2;0 1 0 -3;0 0 1 -4]; B=[0;0;0;1];C=[1 0 0 0];g_ss=ss(A,B,C,D)[num,den]=ss2tf(A,B,C,D);g_tf=tf(num,den)[z,p,k]=ss2zp(A,B,C,D);g_zpk=zpk(z,p,k)运行结果:a =x1 x2 x3 x4x1 0 0 0 -1x2 1 0 0 -2x3 0 1 0 -3x4 0 0 1 -4b =u1x1 0x2 0x3 0x4 1c =x1 x2 x3 x4y1 1 0 0 0d =u1y1 0Continuous-time model.Transfer function:-3.109e-015 s^3 - s^2 - 3.331e-015 s - 4.441e-016 -------------------------------------------------s^4 + 4 s^3 + 3 s^2 + 2 s + 1Zero/pole/gain:- s^2----------------------------------------------(s+0.6724) (s+3.234) (s^2 + 0.0936s + 0.4599)【5.1】(1)程序num=[0,10];den=conv([1,0],[1,7,17]); [numc,denc]=cloop(num,den,-1); G=tf(numc,denc)[y,t]=step(G);plot(t,y,'b-')C=dcgain(G);n=1;while y(n)<0.1*Cn=n+1;endm=1;while y(m)<0.9*Cm=m+1;endrisetime=t(m)-t(n)[Y,k]=max(y); percentovershoot=100*(Y-C)/Ci=length(t);while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1;endsettlingtime=t(i)运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10risetime =2.7312percentovershoot =-0.4399settlingtime =5.1372图:0123456700.10.20.30.40.50.60.70.80.91(2)程序k=[10,100,1000];t=linspace(1,20,200);num=1;den=conv([1,0],[1,7,17]);for j=1:3;s1=tf(num*k(j),den);sys=feedback(s1,1)y(:,j)=step(sys,t);endplot(t,y(:,1),'r',t,y(:,2),'b',t,y(:,3),'g')gtext('k=10');gtext('k=100');gtext('k=1000') 运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10Transfer function:100------------------------s^3 + 7 s^2 + 17 s + 100Transfer function:1000-------------------------s^3 + 7 s^2 + 17 s + 1000图:024681012141618200.20.40.60.811.21.41.61.8图:02468101214161820-3-2-1123422【6.1】程序:(1)num1=[1,1];den1=conv([1,0,0],conv([1,2],[1,4]));sys1=tf(num1,den1)rlocus(sys1)运行结果:-12-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(2)num2=[1,1];den2=conv([1,0],conv([1,-1],[1,4,16]));sys2=tf(num2,den2)rlocus(sys2)运行结果:-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(3)num3=[1,8];den3=conv([1,0,0],conv([1,3],conv([1,5],conv([1,7],[1,15])))); sys3=tf(num3,den3)rlocus(sys3)运行结果:-30-25-20-15-10-5051015-20-15-10-505101520Root LocusReal Axis I m a g i n a r y A x i s【6.3】程序:num=[1,2];den=conv([1,0],conv([1,4],conv([1,8],[1,2,5])));sys=tf(num,den)rlocus(sys)[k,poles]=rlocfind(sys)运行结果:Transfer function:s + 2---------------------------------------s^5 + 14 s^4 + 61 s^3 + 124 s^2 + 160 sSelect a point in the graphics windowselected_point =0.0296 + 2.2826i k =135.8815poles =-7.3248-5.41040.0145 + 2.3021i0.0145 - 2.3021i -1.2939图:-20-15-10-5051015-15-10-551015Root LocusReal Axis I m a g i n a r y A x i s【7.3】程序(1)画波特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)bode(sys)grid图(1)-150-100-50050100M a g n i t u d e (d B)10-210-1100101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)程序(2)画奈奎斯特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)nyquist(sys)grid图(2)-16-14-12-10-8-6-4-20-300-200-100100200300Nyquist DiagramReal Axis I m a g i n a r y A x i s程序(3)画零极点图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)pzmap(sys1)gird图(3)P ole-Zero MapReal Axis I m a g i n a r y A x i s -12-10-8-6-4-20-1.5-1-0.50.511.5程序(4)计算相角裕量和幅值裕量num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)[gm,pm,wcg,wcp]=margin(sys)运行结果Transfer function:50---------------------3 s^3 + 31 s^2 + 10 sTransfer function:50--------------------------3 s^3 + 31 s^2 + 10 s + 50gm =2.0667pm =7.5615wcg =1.8257wcp =1.2645程序(5)绘制阶跃响应曲线num=[50];den=conv([1,0],conv([1,10],[3,1])); sys=tf(num,den)sys1=feedback(sys,1)step(sys1)图(5)00.20.40.60.811.21.41.61.82Step ResponseTime (sec)A m p l i t u d e【7.4】程序如下:num=[300];den=conv([1,0,0],conv([0.2,1],[0.02,1]));sys=tf(num,den)margin(sys)grid波特图如下:-150-100-50050100M a g n i t u d e (d B )10-1100101102103-360-315-270-225-180P h a s e (d e g )Bode DiagramGm = Inf , P m = -78 deg (at 11 rad/sec)Frequency (rad/sec)【9.3】程序:A=[-2 2 -1;0 -2 0;1 -4 0];B=[0;0;1];C=[1,0,0];D=0;M=ctrb(A,B)m=rank(M)if m==3;disp('系统可控')elsedisp('系统不可控')endN=obsv(A,C)n=rank(N)if n==3;disp('系统可观')elsedisp('系统不可观') endsys=ss(A,B,C,D) [num,den]=ss2tf(A,B,C,D) sys1=tf(num,den)[z,p,k]=ss2zp(A,B,C,D)运行结果:M =0 -1 20 0 01 0 -1m =2系统不可控N =1 0 0-2 2 -13 -4 2n =2系统不可观a =x1 x2 x3x1 -2 2 -1x2 0 -2 0x3 1 -4 0b =u1x1 0x2 0x3 1c =x1 x2 x3y1 1 0 0d =u1y1 0 Continuous-time model.0 0 -1 -2den =1 4 5 2Transfer function:-s - 2---------------------s^3 + 4 s^2 + 5 s + 2z =-2p =-1-1-2k = -1【10.1】(1)程序:A=[0,1,0,0;0,5,0,0;0,0,-7,0;0,0,0,-8]; B=[0;1;0;1];C=[1,2,3,4];D=zeros(1,1);G_ss=ss(A,B,C,D)运行结果:a =x1 x2 x3 x4x1 0 1 0 0x2 0 5 0 0x3 0 0 -7 0x4 0 0 0 -8u1x1 0x2 1x3 0x4 1c =x1 x2 x3 x4y1 1 2 3 4d =u1y1 0(2):程序:[num1,den1]=ss2tf(A,B,C,D); p=roots(den1)i=0;for k=1:1:length(p)if real(p(k))>0i=i+1;endendif i>0disp('系统不稳定');elsedisp('系统稳定');end运行结果:p =5.0000-8.0000-7.0000系统不稳定(3)(4)程序:AA=[0,1,0;0,5,0;0,0,-8];BB=[0;1;1];P=[-1,-2,-8];K=acker(AA,BB,P);i=4;K(4)=0;Kpp=eig(A-B*K)sys1=tf(num1,den1);[y1,t]=step(sys1);plot(t,y1)hold onA_feedback=A-B*K;[num2,den2]=ss2tf(A_feedback,B,C,D); sys2=tf(num2,den2);[y2,t]=step(sys2);plot(t,y2,'r')gridgtext('反馈前')gtext('反馈后')运行结果:K =2 8 0 0pp =-8-2-1-7图形:01234560123456【13.1】程序:A=[0,1;0,0];B=[0;1];C=[1,0];D=zeros(1,1);G_ss=ss(A,B,C,D)M=ctrb(A,B);if rank(M)==2disp('系统完全能控'); elsedisp('系统不完全能控'); endS=[1,0];N=obsv(A,S);if rank(N)==2disp('(A,S)可观测'); elsedisp('(A,S)不可观测'); endR=1;Q=[1,0;0,0];[K,P,E]=Lqr(A,B,Q,R)A_new=A-B*K;G_new=ss(A_new,B,C,D);t=linspace(0,5,100)';y1=step(G_ss,t);y2=step(G_new,t);plot(t,y1,'r:',t,y2,'b-')gridgtext('反馈前')gtext('反馈后')运行结果:a =x1 x2x1 0 1x2 0 0b =u1x1 0x2 1c =x1 x2y1 1 0d =u1y1 0Continuous-time model. 系统完全能控(A,S)可观测K =1.0000 1.4142P =1.4142 1.00001.0000 1.4142E =-0.7071 + 0.7071i-0.7071 - 0.7071i图形:00.51 1.52 2.53 3.54 4.5502468101214。
matlab课后习题及答案
第一章5题已知a=4.96,b=8.11,计算)ln(b a e b a +-的值。
解:clearclca=4.96;b=8.11;exp(a-b)/log(a+b)ans =0.01676题已知三角形的三边a=9.6,b=13.7,c=19.4,求三角形的面积。
提示:利用海伦公式area =))()((c s b s a s s ---计算,其中S=(A+B+C)/2.解:clearclca=9.6;b=13.7;c=19.4;s=(a+b+c)/2area=sqrt(s*(s-a)*(s-b)*(s-c))s =21.3500第二章8题已知S=1+2+2^2+2^3+……+2^63,求S 的值解:clearclcS=0;for i=0:1:63S=S+2^i;endSS =1.8447e+0199题分别用for 和while 循环结构编写程序,计算∑=-1001n 1n 2)(的值。
解:clearclcs=0;for n=1:100s=s+(2*n-1);endss =10000clearclcn=1;s=0;while n<=100s=s+(2*n-1);n=n+1;endss =10000第三章2题在同一坐标下绘制函数x ,,2x -,2x xsin(x)在()∏∈,0x 的曲线。
解:clearclcx=0:0.2:pi;y1=x;y2=x.^2;y3=-(x.^2);y4=x.*sin(x);plot(x,y1,'-',x,y2,'-',x,y3,'-',x,y4,'-')00.51 1.52 2.53-10-8-6-4-22468109题用不同的线型和颜色在同一坐标内绘制曲线y1=2e x 5.0 、y2=sin(2∏x )的图形。
解:clearclcx=0:0.01:pi;y1=2*exp(-0.5*x);y2=sin(2*pi*x);plot(x,y1,'b:',x,y2,'r--')00.51 1.52 2.53 3.5-1-0.50.511.52第四章1题对表达式f=3238641+++x x x 进行化简。
(完整版)MATLAB)课后实验答案[1]
![(完整版)MATLAB)课后实验答案[1]](https://img.taocdn.com/s3/m/a428921bf524ccbff12184eb.png)
实验一 MATLAB 运算基础1.先求下列表达式的值,然后显示 MATLAB 工作空间的使用情 况并保存全部变量解:4.完成下列操作:(1) 求[100,999] 之间能被21整除的数的个数。
(1) z i 2sin 85° 1 e 2Z 2 卯(x L),其中x2 0.45 2i 5Z 3 0.3a 0.3a e e 2sin (a 0.3)3.0, 2.9,L ,2.9, 3.0 Z 4t 2t 2 t 2 1 2t 其中 t=0:0.5:2.5(2) 建立一个字符串向量,删除其中的大写字母。
解: (1)结果:m=100:999;n=fin d(mod(m,21)==0);len gth( n)ans =43(2).建立一个字符串向量例如:ch二'ABC123d4e56Fg9:则要求结果是: ch二'ABC123d4e56Fg9:k=fi nd(ch>='A'&ch<='Z'); ch(k)=[] ch =123d4e56g9 实验二MATLAB 矩阵分析与处理1.设有分块矩阵A E 3 3 °2 3 R 3 2S 2 2 ,其中E 、R 、0、S 分别为单位矩阵、随机矩阵、零矩阵和对角阵,试通过数值计算验证A 2 E R RS 0 S 22 3 4 1 1 1 3 4 5 1 1 1 4 5 6 x , 0.95 x 2 0.67 x 3 0.52(1) 求方程的解。
(2) 将方程右边向量元素 b 3改为0.53再求解,并比较 b 3的变化和解的相对变化。
(3)计算系数矩阵A 的条件数并分析结论。
解:M 文件如下: 解:M 文件如下; 5.下面是一个线性方程组:实验三选择结构程序设计1. 求分段函数的值。
x2x 6 x 0且x 3y x2 5x 6 0 x 5且x 2 及x 3x2x 1 其他用if语句实现,分别输出x=-5.0,-3.0,1.0,2.0,2.5,3.0,5.0 时的y值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB仿真课后习题答案
MATLAB仿真课后习题答案
第一章
1.要求在闭区间[0,2Π]上产生具有10个等间距采样点的一维数组。
试用两种不同的指令实现。
解答:方法1:a=0:2*pi/9:2*pi
方法2:a1=linspace(0,2*pi,10)
4.任意建立矩阵A,然后找出在[10,20]区间的元素的位置。
解答:A=[4,15,-45,10,6;56,0,17,-45,0]
A =
4 1
5 -45 10 6
56 0 17 -45 0
>> find(A>=10&A<=20)
ans =
3
6
7
第二章
M文件的2种形式:命令文件和函数文件。
命令文件没有输入输出参数,执行时只需在命令窗口中键入文件名回车即可;而函数文件是一条以function语句作为引导。
即文件的第一行为function[返回参数1,返回参数2,…]=函数名(输入参数1,输入参数2,…)。
这一行的有无是区分命令文件与函数文件的重要标志。
函数文件可以接受输入变量,还可以返回输出变量,执行时需在命令窗口中以固定格式调用函数方可。
习题2
2-1.编写程序,建立向量N=[1,2,3,4,5],然后利用向量N产生下
列向量:
(1) 2,4,6,8,10
(2) 1/2, 1, 3/2, 2, 5/2
(3) 1, 1/2, 1/3, 1/4, 1/5
(4) 1, 1/4, 1/9, 1/16, 1/25
解答:>> N1=2*N >> N2=N/2 >> N3=1./N >> N4=1./N.^2 2-2从键盘输入一个3位数的整数,将它反向输出。
如输入639,输出936。
输入一个百分制成绩,要求输出成绩等级A、B、C、D、E。
其中90~100分为A,80~89分为B,70~79分为C,60~69分为D,60分以下为E。
要求:(1)分别用if语句和switch语句实现。
(2)输入百分制成绩后要判断该成绩的合理性,对不合理的成绩应输出出错信息。
clear ;(将三位数反向输出的程序)
m=input(' input three ');
m1=fix(m/100);
m2=rem(fix(m/10),10);
m3=rem(m,10);
m=m1+m2*10+m3*100;
disp(m);
关于分数的程序实现
c=input('input grade');
if c>=90 & c<=100 %用if语句实现
disp('A');
elseif c>=80& c<90
disp('B');
elseif c>=70 & c<80
disp('C');
elseif c>=60 & c<70
disp('D');
elseif c>=0 & c<60
disp('E');
else
disp('erro');
endc=input('请输入一个百分制分数');
switch fix(c/10) %用switch语句实现
case {9,10}
m='A';
case {8}
m='B';
case{7}
m='C';
case {6}
m='D';
case num2cell(0:5)
m='E';
otherwise
m='输入出错';
end
disp(m);
2-3.输入20个数,求其中最大数和最小数。
要求分别用循环结构和调用MATLAB的max函数、min函数来实现。
a=input('输入矩阵形式的20个数');%用循环结构实现
max=a(1);
min=a(1);
for i=1:20;
if max<a(i);< p="">
max=a(i);
end
if min>a(i);
min=a(i);
end
end
max
min
clear
a=input('请输入二十个数');%以下用max、min函数实现
max=max(a)
min=min(a)
2-4先用函数的递归调用定义一个函数文件求∑I,然后调用该函数文件求∑k+∑k^2+∑1/k 程序如下:
定义一个求和函数:function sum=add(n,m)
if n<1
sum=0;
else s
um=n^m+add(n-1,m);
end
主函数:clear all
y=add(100,1)+add(50,2)+add(10,-1);
disp(y)
2-5已知
(1 )出现错误?function a=n2a(n)
a = n+10*ln(n*n+5);
y=n2a(40)/(n2a(30)+n2a(20));
(2)function b=n1b(n)
b=0;
for i=1:n
b=b+i*(i+1);
end
y=n1b(40)/(n1b(30)+n1b(20)) </a(i);<>。