神经网络自整定多变量PID控制方法研究
bp神经网络在pid控制器参数整定中的应用

bp神经网络在pid控制器参数整定中的应用PID控制器(PID, Proportional-Integral-Derivative)是近几十年来应用最为广泛,最成功的控制系统之一,用于正确、稳定地控制各种过程,是目前工业过程控制领域的主要技术。
目前,PID控制器的参数设置方法以人工方法为主,但由于人工方法的受限性,一般只能获得较为粗糙的参数。
在这种情况下,基于神经网络的自动参数整定方法以其快速和准确的特点得到了广泛的应用。
其中,bp神经网络是一种具有广泛应用前景的神经网络模型,它具有自适应特性,可以用于PID控制器参数整定。
首先,利用bp神经网络对过程模型进行研究,根据实际情况确定合理的PID参数,然后利用bp神经网络进行参数自动整定,构建出较为精确的控制系统,用以让过程回路的稳定性和控制精度达到最优。
此外,bp神经网络还可以应用于复杂的线性和非线性双向控制系统,如液位控制、温度控制等,增强了系统的可控性,并大大提高了控制性能和控制质量。
利用bp神经网络实现PID控制器参数自动整定,可以有效提高控制器在不同情况下的精度和可靠性,解决人工方法难以满足的实际控制需求,具有广泛的应用前景。
同时,bp模型本身也有一定的缺陷,例如计算时间长,精度不够等,因此今后有必要进行深入的研究,以发展更先进的控制方法,使之能够更全面地运用于工业过程中。
综上所述,基于bp神经网络的PID控制器参数整定技术是当今应用技术中的一个热点,具有巨大的应用潜力。
它可以有效改善PID 控制系统的性能,并且能够满足不同应用场合的需求,为工业过程控制技术的发展提供了有力的支持。
未来,将继续围绕bp神经网络模型,进行系统的性能分析及参数设计,以更好地服务工业过程控制的发展。
BP神经网络在PID参数自整定中的应用
摘要摘要PID控制方法是经典控制算法中的典型代表,并在多种控制场合取得了很好的效果,但随着生产工艺的日益复杂和人们对工业过程总体性能要求的不断提高,被控对象越来越复杂,大量非线性控制对象的出现,传统的PID控制方法往往难以满足闭环优化控制的要求。
而神经网络作为现代信息处理技术的一种,正在很多应用中显示了它的优越性,神经网络PID控制技术在其中扮演了十分重要的角色,并且仍将成为未来研究与应用的重点技术之一。
本文阐述了神经网络PID控制算法的基本原理,并对几种典型的神经网络PID控制器的控制性能进行了分析。
关键词:神经网络;PID控制;Matlab仿真;梯度搜索算法;BP算法IABSTRACTABSTRACTThe PID control method is one of the traditional eontrol methods and gets good effects under many application situation.But with the increase in complexity of manufacture technics and demands of industrial process performance,the conventional PID control can not meet the requirement of closed loop optimized control.Neural network,as one of modern information proeess technologies,has some advantages in many application.Neural network PID control teehnology in which Plays a very imPortant role,and will become one of the focus of the research and application of teehnology.In this paper ,we describes the basic principles of neural network PID control arithmetic, and form the simulinks of Neural network PID controller,analyse their differences.Keywords:Neural Networks;PID Control;Matlab Simulation;Gradient Search Arithmetic;BP ArithmeticII目录第一章引言 (1)1.1神经网络PID控制器研究现状及发展态势 (1)1.2选题依据及意义 (1)1.3课题研究内容 (2)1.4课题的目标与拟解决的问题 (2)第二章人工神经网络 (3)2.1 人工神经网络的发展 (3)2.2 生物神经元 (4)2.3 人工神经网络的结构 (5)2.3.1人工神经元及其激活函数 (6)2.3.2 神经网络的拓扑结构 (8)2.4 神经网络的学习 (10)2.4.1 神经网络的学习方式 (10)2.4.2 神经网络学习算法 (11)2.5神经网络的特点及其应用 (13)2.5.1 神经网络的特点 (13)2.5.2 神经网络的应用 (13)第三章传统PID控制 (14)3.1 传统PID控制简介 (14)3.2 数字PID控制算法 (15)3.3 PID控制的参数及其整定 (15)3.3.1 PID控制参数对性能的影响 (15)3.3.2 PID控制参数的整定 (16)3.4 传统PID控制的难题 (17)第四章BP神经网络PID控制器 (19)4.1 神经网络用于控制领域 (19)4.2 神经网络PID控制研究的意义与现状 (19)4.3 BP神经网络 (20)4.4 BP神经网络参数自整定PID控制器 (22)4.5 BP神经网络近似PID控制器 (26)III第五章BP神经网络PID控制器的编程与仿真 (29)5.1 编程语言Matlab语言简介 (29)5.2 BP神经网络自整定PID控制器的编程实现 (30)5.2.1参数初始化核心代码 (30)5.2.2 前馈计算核心代码 (30)5.2.3 误差反传核心代码 (31)5.3 BP神经网络自整定PID控制器的仿真 (32)5.4 BP神经网络近似PID控制器的编程实现 (38)5.5 BP神经网络近似PID控制器的仿真测试 (39)5.6 本章小结 (41)结束语 (42)参考文献 (43)致谢 (44)附录一:神经自整定PID控制器的M程序 (45)附录二:神经近似PID控制器的M程序 (48)外文资料原文 (51)外文资料译文 (54)IV第一章引言第一章引言1.1神经网络PID控制器研究现状及发展态势PID控制器从问世至今已经几十年了,成为工业过程控制中主要技术成功应用于机械冶金电力和轻工等工业过程控制领域中[1],对于PID控制器来说,要想得到较理想的控制效果,必须先对其三个参数:即比例系数( Kp ),微分系数( Ki ),微分系数( Kd )进行优化。
(完整word版)基于BP神经网络的自整定PID控制仿真
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
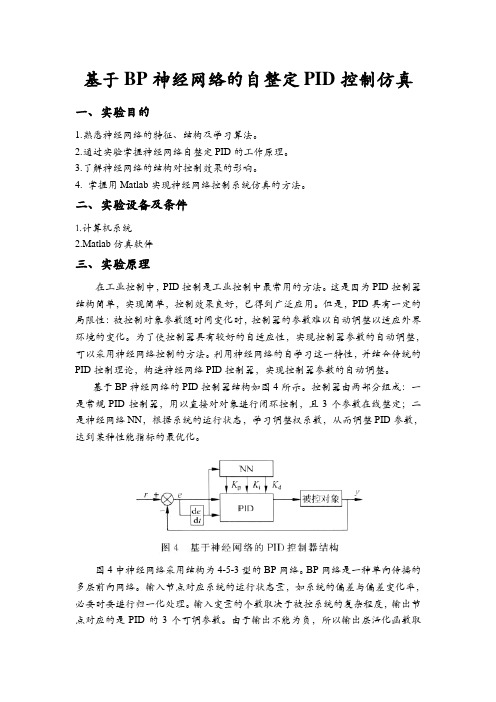
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
基于FPGA的神经网络自整定PID控制器设计

0..2 年 2 月
基于 !"#$ 的神经网络自整定 "%& 控制器设计
!"# $#%&’( )* +#,-./ +#01)-2 3#/*4!,(&(’ 56$ 7)(0-)//#- 8.%#9 )( :5;<
江吕锋
白瑞林
沈宪明
’()*+,)
(江南大学控制科学与工程研究中心, 无锡
控制器实现非线性控制由 OO、 输出 "%&、 ! 求和、 增益 !" 等组成。 OO 自整定增量式 "%& 控制算法形式 为 !#$ % !& ’( ($ ) ($ ) ()* !+ ’ ($ * !, ’( ($ ) ’ ($ ) ( * ($ ) ’) 式中, !& R $& S -& T !$& , !+ R $+ S -+ T !$+ , !, R $, S -, T !$, , $& 、 $+ 、 $, 为给定基值常量, -& 、 -+ 、 -, 为可调放 大系数, 由 -" 网络拟合 !$& 、 !$+ 、 !$, 为非线性系数, 实现。 -" 网络结构为 ) U V U + 形式, 如图 ’ 所示。 网络训练采用闭环学习, 在线实现整个控制过程
.
引言
随着 )N 技术的迅猛发展, 以及近十多年来智能控
的特点完成改进的 -" 网络自整定 "%& 控制器的 !"#$ 设计。
制技术的成就, 智能控制在工业用仪器仪表和信息电 器 ( %$) 产业中得到了广泛应用, 其实现手段也趋于多 样化。采用 !"#$ 实现控制器与使用冯・诺伊曼 ( 1=3 结构的微控制器 ( .NP) 相比, 具有信息流并 O:@<933) 行性、 快速性、 灵活性和易于扩展等特点。特别在实现 复杂智能控制策略时, 由于微控制器只能顺序执行程 序, 随着算法复杂程度的提高, 执行速度必 将受 到 限 制。 !"#$ 可固件串行与并行实现算法, 从本质上提高 了处理速度, 对实时性要求较高的智能控制过程来说 是一种有效的实现途径。 随着 !"#$ 技术的不断发展, 各种智能控制策略 的 !"#$ 固核实现的研究随之活跃。 2:3;6:44: Q77=63F 等人完成了神经网络的 !"#$ 实现并应用于监控和诊
基于RBF神经网络整定的PID控制器设计及仿真_毕业设计(论文)

华北电力大学毕业设计(论文)题目基于RBF神经网络整定的PID控制器设计及仿真基于RBF神经网络整定的PID控制器设计及仿真摘要目前,因为PID控制具有简单的控制结构,可通过调节比例积分和微分取得基本满意的控制性能,在实际应用中又较易于整定,所以广泛应用于过程控制和运动控制中,尤其在可建立精确模型的确定性控制系统中应用比较多。
然而随着现代工业过程的日益复杂,对控制要求的逐步增高(如稳定性、准确性、快速性等),经典控制理论面临着严重的挑战。
对工业控制领域中非线性系统,采用传统PID 控制不能获得满意的控制效果。
采用基于梯度下降算法优化RBF神经网络,它将神经网络和PID控制技术融为一体,既具有常规PID控制器结构简单、物理意义明确的优点,同时又具有神经网络自学习、自适应的功能。
因此,本文通过对RBF神经网络的结构和计算方法的学习,设计一个基于RBF神经网络整定的PID控制器,构建其模型,进而编写M语言程序。
运用MATLAB软件对所设计的RBF神经网络整定的PID控制算法进行仿真研究。
然后再进一步通过仿真实验数据,研究本控制系统的稳定性,鲁棒性,抗干扰能力等。
关键词:PID;RBF神经网络;参数整定SETTING OF THE PID CONTROLLER BASED ON RBF NEURAL NETWORK DESIGN AND SIMULATIONAbstractAt present, because the PID control has a simple control structure, through adjusting the proportional integral and differential gain basic satisfactory control performance, and is relatively easy to setting in practical application, so widely used in process control and motion control, especially in the accurate model can be built more deterministic control system application. With the increasingly complex of the modern industrial process, however, increased step by step to control requirements (e.g., stability, accuracy and quickness, etc.), classical control theory is faced with severe challenges. Non-linear systems in industrial control field, using the traditional PID control can not obtain satisfactory control effect. Optimized RBF neural network based on gradient descent algorithm, it will be integrated neural network and PID control technology, with a conventional PID controller has simple structure, physical meaning is clear advantages, at the same time with neural network self-learning, adaptive function. Therefore, this article through to the RBF neural network structure and the calculation method of learning, to design a setting of the PID controller based on RBF neural network, constructs its model, and then write M language program. Using the MATLAB software to design the RBF neural network setting of PID control algorithm simulation research. Data and then further through simulation experiment, the control system stability, robustness, anti-interference ability, etc.Keywords: PID; RBF neural network; Parameter setting目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2神经网络的发展历史 (3)2 神经网络 (6)2.1神经网络的基本概念和特点 (6)2.2人工神经网络构成的基本原理 (7)2.3神经网络的结构 (8)2.3.1前馈网络 (8)2.3.2 反馈网络 (8)2.4神经网络的学习方式 (9)2.4.1监督学习(有教师学习) (9)2.4.2非监督学习(无教师学习) (9)2.4.3再励学习(强化学习) (9)2.5 RBF神经网络 (10)2.5.1 RBF神经网络的发展简史 (10)2.5.2 RBF的数学模型 (10)2.5.3被控对象Jacobian信息的辨识算法 (11)2.5.4 RBF神经网络的学习算法 (12)2.6 本章小结 (14)3 PID控制器 (14)3.1 PID控制器简介 (14)3.2 经典PID控制原理 (14)3.3 现有PID控制器参数整定方法 (16)3.4 PID控制的局限 (17)3.5本章小结 (17)4 基于RBF神经网络整定的PID控制器设计 (17)4.1 RBF神经网络的PID整定原理 (17)4.2 神经网络PID控制器的设计 (18)4.3 本章小结 (19)5 仿真分析 (19)5.1 系统的稳定性分析 (19)5.2 系统抗干扰能力分析 (21)5.3 系统鲁棒性分析 (22)5.4 本章小结 (24)结论 (25)参考文献 (26)致谢 (27)附录仿真程序 (28)1 绪论1.1 课题研究背景及意义PID控制器(按比例、积分和微分进行控制的调节器)是最早发展起来的应用经典控制理论的控制策略之一,是工业过程控制中应用最广泛,历史最悠久,生命力最强的控制方式,在目前的工业生产中,90%以上的控制器为PID控制器。
bp神经网络在pid控制器参数整定中的应用

bp神经网络在pid控制器参数整定中的应用
BP神经网络在控制器参数整定中的应用越来越广泛。
BP神经网
络是一种人工神经网络,可以模拟人类神经系统的信息处理功能,用
于复杂系统建模和控制,在PID控制器参数整定中得到了广泛的应用。
一般来说,PID控制器由三部分组成:比例、积分和微分。
根据常
规PID控制调节策略,需要经过多次实验调整参数,以获得最佳控制
效果。
然而,传统的参数调整方法难以满足快速改变的系统和复杂的
控制系统的变化需求,因此,BP神经网络的出现为PID控制参数整定
提供了一种新的思路和手段。
BP神经网络可以用于自动调整PID参数,具有更高的效率和更好
的精度。
通过将系统模型形式化为BP神经网络,可实现基于模型的
PID调节策略,使得调节参数直接从系统模型获得,从而极大地减少参
数的调节时间。
此外,BP神经网络还可以用于故障诊断,如特征提取、特征识别和故障诊断。
可以说,BP神经网络的出现,大大提高了控制
器参数的整定效率和精度。
因此,BP神经网络已成为PID控制器参数整定的重要工具。
它不
仅可以大大提高控制参数调整效率,而且还可以更准确地预测控制系
统的行为。
同时,BP神经网络也可以用于诊断和保护,以确保系统更
加稳定和可靠。
因此,BP神经网络在PID控制器参数整定中应用广泛。
基于神经网络的PID控制算法研究
基于神经网络的PID控制算法研究近年来,随着机器学习和人工智能技术的不断发展,神经网络在控制领域的应用也逐渐得到了广泛关注。
其中,基于神经网络的PID控制算法作为一种新型的控制方法,已经被证明具有极高的控制精度和适应性。
由于传统的PID控制算法存在着超调、稳态误差等问题,因此在实际工程中往往需要进行各种手动调参。
而基于神经网络的PID控制算法则可以通过学习数据来自适应地优化控制参数,从而在不同工况下都能够实现优秀的控制效果。
同时,神经网络还可以实现非线性控制和逆模型控制等高级控制策略,更加符合实际应用的需求。
基于神经网络的PID控制算法的基本思路是,将神经网络与PID控制器结合起来,构建一个新的混合型学习控制器。
具体而言,首先需要建立一个基于神经网络的模型来描述被控对象的动态特性,然后利用该模型对PID控制器进行参数的自适应优化,最终实现目标系统的控制。
一般来讲,神经网络PID控制算法的实现过程包括以下几个步骤:首先,需要选择合适的神经网络模型和控制器结构。
然后,利用样本数据对神经网络进行训练,得到一个有效的模型。
接着,将训练好的神经网络模型与PID控制器进行耦合,形成一个混合型控制器。
最后,通过仿真或者实际测试来验证控制器的性能。
在具体实现神经网络PID控制算法时,需要注意以下几个关键问题:一是神经网络的选择和搭建,不同的应用需要选择不同的网络结构和训练算法;二是神经网络模型的准确性,神经网络需要能够准确地描述被控对象的动态特性;三是控制器的参数优化,需要避免过度学习和过拟合等问题。
目前,神经网络PID控制算法已经成功应用于许多领域,例如机械控制、电力系统控制、化工过程控制等。
实际应用结果显示,基于神经网络的PID控制算法相比传统PID控制算法,在控制精度、抗干扰能力、稳定性等方面都具有显著的优势,是一种极具应用前景的控制策略。
总的来说,基于神经网络的PID控制算法是一种结合了神经网络与PID控制器的混合型学习控制策略,具有优秀的控制精度和适应性。
多变量耦合系统PID神经网络控制方法研究
多变量耦合系统PID神经网络控制方法研究朱林;吴冬雪;赵倩【摘要】多变量系统内部的耦合性以及对象参数的复杂性,给控制系统的设计带来了一系列的问题。
传统控制方法无法对其进行精确解耦,导致系统控制精度较低。
本文构建一种基于遗传算法优化的PID神经网络解耦控制器。
该方法利用PID优良的动态控制特性和神经元网络非线性表达能力对多变量耦合系统进行解耦,在神经网络权值修正算法中增加动量项,提高网络学习效率,并采用遗传算法优化初始权值,克服了PID神经网络权值学习过程中易陷入局部最优值的缺点,提高了控制精度。
仿真结果表明:优化后的PID神经网络具有较高的稳态精度和较快的响应速度,能够实现解耦控制。
【期刊名称】《制造业自动化》【年(卷),期】2014(000)003【总页数】4页(P125-128)【关键词】神经网络;遗传算法;多变量;解耦;PID控制【作者】朱林;吴冬雪;赵倩【作者单位】内蒙古科技大学信息工程学院,包头014010;内蒙古科技大学信息工程学院,包头014010;中海石油海南天然气有限公司,海口578001【正文语种】中文【中图分类】TP1830 引言以多变量、强耦合、非线性为特点的复杂工业过程控制,一直是控制理论与控制工程领域的研究热点和前沿。
复杂工业过程控制由于数学模型变量多、变量间耦合、非线性和高阶,相应控制器设计困难。
在工业控制中,PID控制一直是通用、有效的控制方法[1]。
但是,面对多变量、强耦合、非线性为特点的复杂工业过程,PID控制效果会变差甚至不可控。
神经网络具有很强的自学习、自适应和任意非线性表达能力,近年来逐渐应用于复杂系统的控制中。
当系统存在不确定性因素时,更能体现神经网络的优越性。
文献[2]以二变量耦合时变系统为对象,设计了一种PID神经网络模型。
该模型与用神经网络对PID控制器参数进行辅助修改的方法有本质的区别[3,4]。
应用PID神经网络控制时,无需为对象的参数和系统结构进行辨识,可根据对象参数变化时对系统输出的影响,“在线”地调整PID神经网络的权值,较好地解决了多变量、耦合系统的控制难题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S u y o ef Tu i g M u t a ib e P D n r l r t d n S l- n n l v ra l I Co t ol i e
Ba e n Ne r lNewo k s d o u a t r
W ANG a - i LI Me g, U i Xi o y , U n LI Za -we L AN a -f n n, I Xio e g
第2卷 第5 9 期
文章编号 : 0 — 3 8 2 1 ) 5 0 0 — 4 1 6 9 4 ( 02 0 — 2 5 0 0
计
算
机
仿
真
21年5 0 2 月
神 经 网络 自整 定 多 变 量 P D 控 制 方 法 研 究 I
王 小艺 . 刘 萌 , 载文 ,院 , 北京 104 ) 00 8
paeinrc cl i ioia f ii dbd B B sw g yt h s ne i uao b lg ll d e e ( F ) e aess m,adcnie n et e y ol er r tn o c u z e n os r gt i dl ,n n na, d i h me a i
( col f o p t n fr a o nier g e igTc nl ya dB s esU i ri , e ig10 4 , h a Sho o m ue a dI om t nE g ei ,B in eh o g n ui s n esy B in 00 8 C i ) C r n i n n j o n v t j n
d f et ee t ajs t a fm d yPD prm t s iay h i l i xei n eut so a te ie n vl o d th rt o oi I aa ee .Fnl ,tes a o epr t sl h w t t h fr l u e e f r l mu t n me r s h
meh d i e s l n f ci e i h F e g y t m. t o sf a i e a d ef t n t e B B s wa e s se b e v
KEYW ORDS: DRNN; i lgc ud z d b d; e - u i g; e o p ig c n r l B oo ia f i ie e S r t n n D c u l o to l l f n
PD cnrl e o ae ntedao a rcr n nua ntok D N I o t t dbsdo ignl eur t e r e r( R N)w spooe i ppr no e t om h h e l w a rpsdi t s ae.I r ro nh d
摘要 : 关于污水优化处理系统控 制问题 。针对 三相 内循环生物 流化床污水处理系统结构上的特殊性和生物反应过程 的复杂 性. 以及污水处理过程的非线性 、 时滞 、 时变 、 多输人多 输出等 特点 , 出一种对角递 归神经 网络 ( i oa R cr n N ua 提 Da nl eur t erl g e N tok D NN) 自整定多变量 PD控制方法。通过 D N e r, R w 的 I R N对控制参 数进行在线辨识 , PD控制 器提供梯度 信息 ; 为 I 同时 考虑到生物流化床污水处理系统输出变量 之间的特殊耦合关 系 , 将反馈偏差 划分为不 同等级 , 以调整 PD参数 修正速率 的 I 快慢。进行仿 真验证 , 验证了该 方法在 生物流化床污水处理 中的有效性和可行性 。 关键词 : 角递归神经网络: 对 生物流化 床; 自整定 ; 解耦控制 中图分类号 :P 8 T 13 文献标识码 : A ’
ABS TRACT: mi g a h at u a i fsr cu e a d t e c mp e i fbo o ia e c in p o e s o e t r e Ai n t e p ri l r y o t t r n h o lx t o il gc lr a t r c s ft h e - t c t u y o h
t - a yn ,mu t l n u n l p e o t u fs w g r ame tp o e s n a t — u n n n l —v ra l i me v r i g l p e i p ta d mu t l u p to e a e t t n r c s ,a u o t r i g a d mut a be i i e i i