挖藕机工作原理
莲藕种植技术_莲藕的种植技巧
莲藕种植技术_莲藕的种植技巧莲藕可生食也可做菜,所以有很多的烦人都想要种植莲藕,但是莲藕不是那么好种植的。
下面一起来看看店铺为大家精心推荐的莲藕的种植技术,希望能够对您有所帮助。
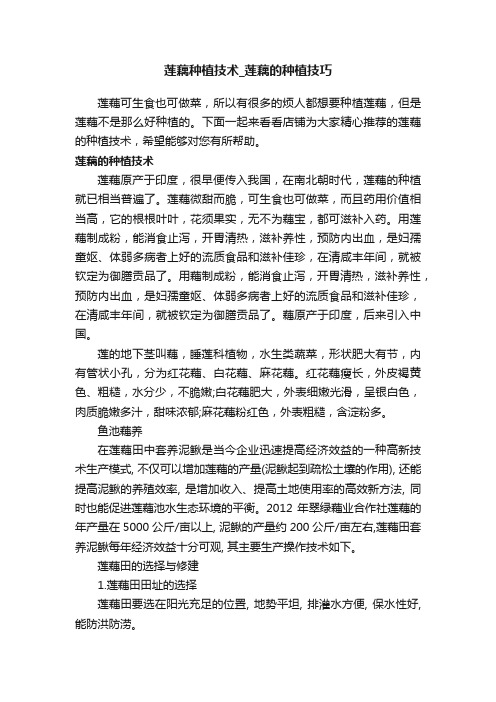
莲藕的种植技术莲藕原产于印度,很早便传入我国,在南北朝时代,莲藕的种植就已相当普遍了。
莲藕微甜而脆,可生食也可做菜,而且药用价值相当高,它的根根叶叶,花须果实,无不为藕宝,都可滋补入药。
用莲藕制成粉,能消食止泻,开胃清热,滋补养性,预防内出血,是妇孺童妪、体弱多病者上好的流质食品和滋补佳珍,在清咸丰年间,就被钦定为御膳贡品了。
用藕制成粉,能消食止泻,开胃清热,滋补养性,预防内出血,是妇孺童妪、体弱多病者上好的流质食品和滋补佳珍,在清咸丰年间,就被钦定为御膳贡品了。
藕原产于印度,后来引入中国。
莲的地下茎叫藕,睡莲科植物,水生类蔬菜,形状肥大有节,内有管状小孔,分为红花藕、白花藕、麻花藕。
红花藕瘦长,外皮褐黄色、粗糙,水分少,不脆嫩;白花藕肥大,外表细嫩光滑,呈银白色,肉质脆嫩多汁,甜味浓郁;麻花藕粉红色,外表粗糙,含淀粉多。
鱼池藕养在莲藕田中套养泥鳅是当今企业迅速提高经济效益的一种高新技术生产模式, 不仅可以增加莲藕的产量(泥鳅起到疏松土壤的作用), 还能提高泥鳅的养殖效率, 是增加收入、提高土地使用率的高效新方法, 同时也能促进莲藕池水生态环境的平衡。
2012年翠绿藕业合作社莲藕的年产量在5000公斤/亩以上, 泥鳅的产量约200公斤/亩左右,莲藕田套养泥鳅每年经济效益十分可观, 其主要生产操作技术如下。
莲藕田的选择与修建1.莲藕田田址的选择莲藕田要选在阳光充足的位置, 地势平坦, 排灌水方便, 保水性好, 能防洪防涝。
2.莲藕田的修建莲藕田四周需加高加固, 田深控制在50~ 60cm, 水深控制在20~ 30 cm, 并在进出水口设置防逃网, 以防泥鳅外逃。
用水泥板立在田埂壁上, 水泥板缝要用水泥封好。
3.莲藕田的消毒将莲藕田水深控制在10 cm 左右, 生石灰按60公斤/ 亩化浆后趁热搅拌, 全田泼洒, 也可以用漂白粉15公斤或强氯精5公斤溶水后全田泼洒, 必须使用塑料制品溶解上述消毒剂。
春季挖藕的技巧和方法

春季挖藕的技巧和方法在春季挖藕的过程中,掌握一些技巧和方法可以提高效率和质量。
以下是一些关于春季挖藕的技巧和方法:1.选择合适的时机:春季气温回升,土壤开始解冻,适合挖藕。
通常,在土温达到10左右时,是挖藕最佳时机。
2.选择合适的地点:藕根比较肉质,需要空气流通,并具备良好的自然光照条件。
因此,选择通风良好、阳光充足的地方进行挖藕。
3.准备工具:挖藕所需的主要工具有锄头或壁虎钩、篾筐、竹叉等。
锄头可用于开垦土地,壁虎钩可以轻松地将藕根取出。
4.清理土地:在挖掘之前,确保土地的表面平整,清除杂草和石头,减少对挖藕过程的干扰。
5.藕池的清理:清理藕池是春季挖藕的一项重要任务。
藕池内应该清除污泥和杂草,并且加入适量的有机肥料来提高土壤的肥力。
6.正确的挖掘姿势:挖藕时要保持正确的姿势,以减少拉伤和腰背不适。
双膝下蹲,使上半身保持直立,用手插入土中轻轻摸索藕根的位置。
7.小心挖掘:将壁虎钩慢慢插入土壤中,找到藕根的位置后,轻轻地向外拉扯,将藕根从土壤中取出。
注意避免用力过大,以免破坏藕根。
8.及时处理藕根:藕根挖出后,应立即清洗干净。
可以用清水冲洗,去除土壤和杂质。
9.保鲜:为了保持藕的新鲜和质量,可以在挖掘后将其放入水中浸泡。
也可以放入湿润的麻袋或湿毛巾中,尽量减少藕根的损伤。
10.分类储存:根据藕的大小和品质,将藕分门别类地储存在麻袋或竹篓中。
同时,确保藕的储存环境通风干燥,避免长时间暴露在阳光下。
11.延长储存时间:为了延长藕的储存时间,可以选择低温、适度湿润、通风良好的地方存放。
同时,定期检查藕的状态,及时处理受损或腐烂的藕。
12.利用剩余部分:挖藕后,可以将藕叶和茎剩余部分进行处理。
藕叶可以加工成饲料或堆肥,而藕茎可以切块或晾晒后用来炒菜。
通过以上技巧和方法,我们可以更加有效地挖掘藕的同时,保证藕的质量和保存时间,使我们能够充分享受到春季丰富的藕的美味。
微耕机的原理

微耕机的原理微耕机是一种小型农业机械设备,主要用于农田的翻耕、耕作和整地。
它的出现极大地方便了农民的农业生产,提高了农田的利用率和产量。
那么,微耕机的原理是什么呢?接下来,我们将从几个方面来详细介绍微耕机的原理。
首先,微耕机的原理是基于机械力学的。
微耕机通过发动机带动旋耕刀或耙头进行旋转,利用旋转的力量来实现土壤的翻耕和耕作。
这种原理就好比我们平时用力旋转耙子或铲子来翻土一样,只不过微耕机是通过发动机来提供动力,从而更加高效和省力。
其次,微耕机的原理也涉及到土壤力学和土壤物理学的知识。
在微耕机的作用下,土壤受到了一定的压力和摩擦力,从而实现了土壤的破碎和翻耕。
同时,微耕机的旋耕刀或耙头也会对土壤进行一定的搅拌和混合,使得土壤的结构更加松散,便于农作物的生长。
此外,微耕机的原理还与动力学有关。
微耕机在工作时会受到一定的阻力,需要克服这些阻力才能进行正常的翻耕和耕作。
因此,微耕机的设计和选材都需要考虑到动力学的原理,以确保微耕机能够稳定、高效地工作。
最后,微耕机的原理还包括了一些工程学和设计学的知识。
例如,微耕机的结构设计、零部件的选用、传动系统的设计等,都需要考虑到工程学和设计学的原理,以确保微耕机具有良好的性能和稳定的工作状态。
综上所述,微耕机的原理是多方面的,涉及到机械力学、土壤力学、土壤物理学、动力学、工程学和设计学等多个学科的知识。
只有充分理解和应用这些原理,才能设计出性能优良、高效稳定的微耕机,为农业生产提供更好的技术支持。
希望本文能够帮助大家更好地理解微耕机的原理,为相关领域的研究和应用提供一定的参考价值。
农用采藕机主要技术参数及配置
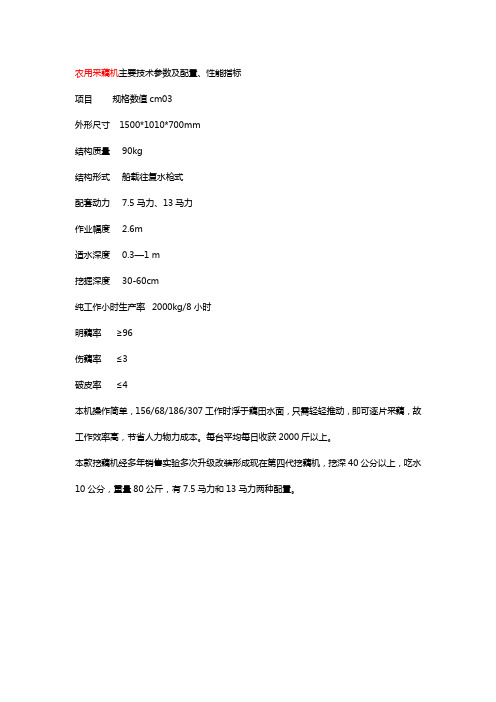
农用采藕机主要技术参数及配置、性能指标
项目规格数值cm03
外形尺寸1500*1010*700mm
结构质量90kg
结构形式船载往复水枪式
配套动力7.5马力、13马力
作业幅度 2.6m
适水深度0.3—1 m
挖掘深度30-60cm
纯工作小时生产率2000kg/8小时
明藕率≥96
伤藕率≤3
破皮率≤4
本机操作简单,156/68/186/307工作时浮于藕田水面,只需轻轻推动,即可逐片采藕,故工作效率高,节省人力物力成本。
每台平均每日收获2000斤以上。
本款挖藕机经多年销售实验多次升级改装形成现在第四代挖藕机,挖深40公分以上,吃水10公分,重量80公斤,有7.5马力和13马力两种配置。
挖藕的技巧
挖藕的技巧
挖藕是一种非常健康的食品,不仅可以增加人体的营养摄入,还可以
起到润肺祛痰、降低血脂和帮助消化的作用。
但是要想挖到美味的藕,需要一定的挖掘技巧和方法。
下面就为大家介绍几种挖藕的技巧。
一、选土法
挖藕的第一步,是要选用好的土壤。
藕喜欢沙土、泥炭土和砂质土,
这些土壤质地柔软、透气好、水分适中又富含营养。
所以在挖藕前,
要选择土壤适宜的地域,比如说山丘地带和周围有水滋润的河边地带等。
二、选择好的藕根
挖藕时,要先利用手插入泥土中,寻找到藕根。
然后轻轻用手缓缓拉起,以避免损害藕皮。
在挖藕的时候,要选一些根部完整、表皮平滑、没有发霉或者虫蛀的藕根。
这样才能保证藕的品质和味道。
三、收支结构
挖藕时,不仅要顾及藕的品质,还要注意收支结构。
利用工具轻轻挖
起藕根,并将泥土拍掉,最好不要用力扯动。
等到将藕根挖出来后,
收起支根,在收起的过程中,尽量减少对藕体的伤害。
四、注意保鲜
藕挖出来以后,要马上清洗干净,然后晾晒至干燥,这样能够延长藕
的保鲜期。
如果不及时晾晒,那么藕就会发黄、变软和变质。
此外,
将藕放入通风干燥的地方保存,能够保持藕的新鲜度。
总之,挖藕不管是技巧还是方法都很重要。
以上介绍的技巧能够帮助
大家挖到新鲜、美味的藕,并且能够延长藕的保鲜期,让大家在品尝
藕的美味时也能够享受藕的健康益处。
微耕机的工作原理

微耕机的工作原理
微耕机的工作原理是通过内燃机驱动旋转刀片,同时通过其重量和设计,使刀片在土壤表层上进行旋转翻耕。
具体步骤如下:
1. 内燃机提供动力:微耕机通常配备一个小型的内燃机,例如汽油发动机或柴油发动机。
这个内燃机通过燃烧汽油或柴油产生能量,驱动整个微耕机的运转。
2. 传输动力到刀片:内燃机的动力会被传输到微耕机的刀片上,通常通过一个皮带或链条传动系统。
这些传动系统将转动的动力传递给刀片旋转轴。
3. 刀片旋转:内燃机的动力转动刀片旋转轴,使刀片开始旋转。
刀片通常是采用锄头或刀片形状,可以有效地穿透土壤。
4. 土壤翻耕:当刀片旋转时,它们会切入土壤表面并将其翻转。
刀片的旋转还会打散和破碎土壤,使得土壤更松散,有助于培土和除草。
5. 土壤平整:除了翻耕土壤,微耕机通常还配备一个后部平整的装置。
这个装置可以在刀片翻耕后平整土壤表面,使其光滑均匀。
通过以上步骤,微耕机可以快速而有效地翻耕土壤,使其具备良好的条件用于种植作物。
马蹄收获机
马蹄产于中国,广布于全世界,全国各地都有栽培,以热带和亚热带地区为多。
那么,马蹄怎么收获呢?用什么机器收获呢?下面就让淮北市千碧荷机械制造有限责任公司给大家简单介绍一下,希望对大家有所帮助。
传统的采收方法:一般在采收前一天放掉田水,因球茎主要集中在9-20厘米的土层中,先扒掉上层8-9厘米泥土,然后将下层土扒出,用手仔细捏出球茎(众称“摸荸荠”)。
如抢种茬口(如油菜茬或小麦茬),应在采收前10-15天排水晾干,用叉挖取。
马蹄收获机为适应稻田湖边不同深度,我们的喷嘴可以自由调节深度,适应面积更广。
独特进水设计,与其他产品只有1米左右进水口不同,我们的进水口有近5米多宽,能够在浅水杂物中正常供水。
吃水浅,能够适应广大山区丘陵地带,10公分以上水位即可正常工作。
操作轻便灵活,对于其他大型马蹄机器不能挖到的边边角角都可挖到不留死角。
淮北市千碧荷机械制造有限责任公司成立于2013年11月12日,坐落在安徽省淮北市濉溪县孙疃镇。
东临京台高速,京沪铁路大动脉,交通便利。
公司拥有专利技术,研发工程师2名,大学专科生3名,致力于独立研发各种农业机械。
本公司主要生产挖藕机及各种小型农业机械,我公司生产的挖藕机是建立在挖藕技术上研发而来的,贴近实际生产,轻便灵活效率高,使广大藕农的好帮手。
目前产品已经远销国内各地,受到广大藕农得普遍好评。
1、千碧荷挖藕机吃水浅,能够适应广大山区丘陵地带,10公分以上水位即可正常工作。
2、独特进水设计,与其他产品只有1米左右进水口不同,我们的进水口有近5米多宽,能够在浅水杂物中正常供水。
3、提升装置:为适应稻田湖边不同深度,我们的喷嘴可以自由调节深度,适应面积更广。
4、体重轻:小型55公斤,大型110公斤,普通两夫妻即可搬运,操作轻便灵活,对于其他大型挖藕机械不能挖到的边边角角都可挖到不留死角。
5、模块组装:与其他挖藕机严密包装不同,我公司产品全部采用分批生产组装,产品透明化高,检修容易,全部可拆开,维修简单。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
挖藕机工作原理
挖藕机的工作原理是通过机械力将藕切割、搅拌、挖掘和输送至后续处理环节。
1. 切割:挖藕机将藕放置在切割机构上,切割机构通过刀片或刀轮对藕进行切割。
切割机构通常配备多个刀片或刀轮,以提高效率。
2. 搅拌:切割后的藕会被搅拌机构搅动,从而使其更加均匀地暴露在机械力下。
搅拌机构通常由旋转的搅拌装置组成,可以将切割的藕杂糅起来。
3. 挖掘:挖藕机会用机械臂或抓斗等装置将藕挖掘出来。
机械臂通常由液压系统控制,可以准确地抓取藕,然后将其输送至后续处理环节。
4. 输送:挖掘的藕会通过输送机构将其运送至后续处理环节。
输送机构通常由输送带或输送链条组成,能够稳定地输送藕。
总之,挖藕机通过切割、搅拌、挖掘和输送等步骤,利用机械力将藕挖掘出来,并将其送到后续处理环节。
这一过程能够提高藕的开采效率,减轻人工劳动强度。