B757培训机电第三册_10(489-532)
B757培训机电第三册_5(281-332)
281-1-532-09-TSHA-06波音飞机公司波音757飞机维护培训手册上海航空公司SHA 757-26D NE-001接近电门电子装置(PSEU)空中/地面,指示目 录 页次 接近电门系统 2 空中/地面敏感系统 20 位置和警告 313209wFEB 28 1989+282-2-引 言接近电门系统1.用途此系统监控起落架,反推力装置,舱门(登机门,检修门,货舱门)以及发动机滑油回油阀的位置。
2.系统说明接近电门电子装置(PSEU)包含微处理机和电路卡,利用来自接近传感器的反馈,为监控系统提供位置指示和故障通告。
PSEU 包含一个BITE 模件,用于系统部件试验并将系统部件故障隔离到航线可换组件(LRU)这一等级。
532-09-501-02A3209wFEB 25 1987+283-3-接近电门系统发动机滑油回油阀接近传感器舱门系统接近传感器反推力装置接近传感器起落架系统接近传感器电子设备检修门119BL见A接近电门电子装置M162电子设备检修门119BL主电子设备中心E3-4设备架BITE 模件M162接近电门电子装置(E3-4)284-4-532-09-502-01B 3209wFEB 25 1987+概 述接近电门电子装置原理图1.特点接近电门电子装置(PSEU)是一台数字式控制装置,包含4个不同形式的电路卡,即接近、逻辑、驱动器和BITE 卡。
A 、接近卡共有6块可互换的接近卡。
每一块卡包含16个通道,其使传感器产生脉冲,确定目标体的近或远,并将输送给逻辑卡的电压,转换为高输出或低输出。
B 、逻辑卡共有3块逻辑卡。
其中两块卡,槽口005和001,是可互换的,而另一块是唯一的。
这些卡接受来自接受卡的高电压信号和低电压信号,并向驱动卡提供输出。
C 、驱动器共有3块可互换的卡,每一卡包含38个独立的驱动器、共向灯、继电器、电门、EICAS 等提供接地。
D 、BITE 卡2块不可互换的以微处理机为基础的机内自测试设备(BITE )卡,位于BITE 模件内,其具有故障隔离和系统试验能力。
B757培训电子第三册_7 (410)
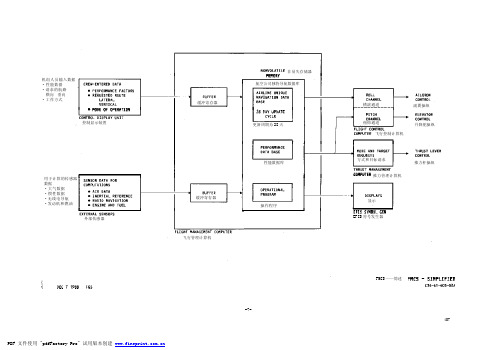
-7-FMCS ——简述外部传感器用于计算的传感器数据·大气数据·惯性数据·无线电导航·发动机和燃油控制显示装置机组人员输入数据·性能数据·请求的航路 横向 垂向·工作方式飞行管理计算机缓冲寄存器缓冲寄存器非易失存储器航空公司独特导航数据库操作程序性能数据库EFIS 符号发生器显示推力管理计算机方式和目标请求飞行控制计算机俯仰通道横滚通道副翼操纵升降舵操纵推力杆操纵更新周期为28天-13-FMC ——导航数据传感器——方块图右IRU中CRU左IRU右ADC左ADC左DME右DME左VOR右VOR燃油量处理器右ILS副驾驶员时钟右EICAS右FMC输入数据(与上述相同)系统间总线左FMC总燃油量VOR 方位数据DME 斜距真空速、计算空速、大气静温,压力高度, 校正气压高度速度,位置,航向,高度,垂直速度航向信标台偏差格林威治时间燃油流量左ILS机长时钟左EICAS-17-FMCS ——电源和外部控制——方块图p11 电路断路器板组件右115V A C 汇流条右F M C CDU右FMCS 计算机右CDUp11电路断路器板组件左F M C CDU左F M C S 计算机左115V AC 汇流条左CDU推力方式选择板空中/地面继电器地面空中推力管理计算机空中/地面继电器地面空中右E F I S 控制板右VOR 控制板AFCS 方式控制板通道B通道A左EFIS 控制板左VOR 控制板自动调谐启动·方式·距离·背景数据对侧CDU BITE 失效·请求·BI TE同侧CDU BITE 失效对侧CDU·导航数据库更新启动·无线电位置更新启动·襟翼位置·引气数据·高度 选择速度·横向导航/垂直导航接通导航数据装入器启动左FMC系统间总线输入数据与左FMC 相同右FMC数据库装入器连接器-25-FMCS ——通用输出总线和离散信号方块图右FMC右FMC 失效报警信息通用总线2通用总线1左FMC报警信息左FMC 失效通用总线2通用总线1左FCC·操作指令·速度请求中FCC·速度请求·操作指令左EICAS 计算机推力目标F MC 注意通告器报警信息右FCC操作指令速度请求右EICAS 计算机推力目标故障数据·推力目标方式请求左IRU 位置初始化中IRU位置初始化右IRU位置初始化右FMC 调谐继电器备用正常左F M C 调谐继电器右DME调谐右VOR左FMC 仪表源选择电门备用正常左DME 调谐左VOR调谐调谐-39-控制显示装置(C D U )字母键数字键“压紧手柄”通告器功能和方式键行选择键光电池阴极射线管D Z U S 紧固件(6处)行选择键亮度调节通告器删除键清除键便笺式存储器数据字段标题数据字段标题行1典型的CDU 显示FMC/自动驾驶仪/TMC有效航路横向导航/垂向导航接通推力管理计算机推力请求E F I S符号发生器俯仰/横滚操作指令升降舵和副翼控制面位移通告单通道接通AFCS方式控制板FMC/飞行指引仪有效航路横向导航/垂向导航接通推力管理计算机推力请求EFIS符号发生器俯仰/横滚操作指令油门伺服作动器AFCS方式控制板飞行指引仪“接通”通告器操作指令FMC/显示有效航路EFIS符号发生器油门伺服作动器-45-FMC——功能选用输入飞行计划航路捕获和跟踪包括标准仪表离场(S I D S)在内的指定飞行计划航路在400英尺以上,可接通横向导航和垂向导航功能按最佳燃油经济性,指令速度和推力自动符合速度和高度限制。
B757培训机电第三册_6(333-372)
333波音飞机公司波音757飞机维护培训手册上海航空公司SHA 757—26DNE001机轮与刹车目录 页次引言 2概述 4部件详述 12工作 33532-40-TSHA-063240WFEB 28 1989+-1-334引 言车轮和刹车系统说明1、 机轮和刹车组件共有8个主机轮,每一机轮都配置液压作动的多盘式刹车。
前起落架双机轮不带液压刹车。
2、 正常刹车系统由右液压系统使正常刹车系统增压。
正常刹车系统包括停机刹车系统,备份刹车系统和蓄压器刹车系统。
3、 备份刹车系统由左液压系统使备份刹车系统增压。
532-40-501-03A3240WJAN 26 1987+-2-335机轮和刹车机轮组件正常刹车(右液压系统)备份刹车(左液压系统)停机刹车刹车蓄压器备份刹车-3-336部件功能说明前机轮和机轮停转刹车装置实体说明1、 机轮组件由系紧螺栓将两个半爿机轮连成一体。
由装在内侧半爿机轮沟槽内的预成型密封图,使两半爿机轮密封。
由两个锥形液柱轴承将机轮机构支承在轮轴上。
轮胎和机轮组件重约95磅。
2、 轮机停转刹车装置两个带可更换摩擦垫的弹簧钢装置固定在前轮舱天花板上。
当前起落收上时,停止前轮转动。
532-45-501-023245WAUG 19 1988+-4-337前机轮和机轮停转刹车装置前轮详图刹车(2处)内侧半爿机轮密封件外侧半爿机轮充气阀系紧螺栓过充气阀前机轮停转刹车装置(2处)摩擦垫前轮胎和机轮组件带舌片的垫圈(参考)轴螺母(参考)锁螺栓组件(2处)(参考)密封件(参考)外轴承组件内轴承组件密封件(参考)机轮隔垫(参考)前-5-338部件功能说明主起落架机轮实体说明由系统螺栓将铝制内半爿机轮和外半爿机轮连接在一起,便于更换轮胎。
安装在外侧半爿机轮上的过充气阀在375——450psi 压力下开启,以防止充气过头。
安装在内侧半爿机轮内的3个热保险塞,防止由于刹车热量聚集而造成轮胎损坏,在390°F 温度下熔化。
B757培训电子第三册_7 (402)
522C34-61-819-01A9045iOCT 17 1986 +-122-工 作FMCS ——基准数据工作图中示出可供机组人员使用的各基准数据页。
-123-FMCS——基准数据进场基准等待点信息下降预报基准导航数据选择所希望的航路点523524-124-C34-61-733-01A9026iAPR 02 1984 +工 作FMCS 基准数据——选择所希望的航路点页1.控制顺序按图所示访问SELECT DESIRED WPT (选择所希望的航路点),并能选择相应的所希望的航路。
2.正常顺序A .概述在FMC 软件控制下,使数据字段和标题格式化。
使用行选择键,实现此种选择。
B .SELECTED DESIRED WPT (选择所希望的航路点)页数据字段1L ~6L ,1R ~6R行选择导致返回到页,由此访问这一页。
所定的航路点被插入操作人员先前试图插入之处。
-125-FMCS基准数据——选择所希望航路点页如果利用了一非独有的标识符,则自动显示选择所希望航路点525526-126-527-127-C34-61-734-02 Sh 19026iAPR 02 1984+工 作FMCS 基准数据——进场基准页1.控制顺序按图所示访问APPROACH REF (进场基准)页,并显示与进场包线有关的数据。
2.正常顺序A .概述在F M C 软件控制下,使数字字段和标题格式化,可按图所示,由行选择键来控制数据字段。
B .APRROACH REF 页数据字段1L 总重显示瞬时的计算出的总重(如果有效)或驾驶员的输入值。
一旦留下页,人工输入总重将被瞬时的计算出的总重所替代。
如果计算出的总重无效,显示提示方框。
4L 跑道长度凡机组人员已输入有效飞行计划一跑道,进场程序或从数据库取出的包含一条具体目的地跑道的公司航路,则以英尺和米为单位,显示跑道长度。
如果已输入,在飞行50海里之前或者在一半路程点之前(取两者中较小值),显示始发地跑道数据,而在飞行超过50海里或超过一半路程点(取两者中较小值),显示目的地跑道数据。
B757培训机电第三册_7(373-462)
373-1-波音飞机公司波音757飞机维护培训手册上海航空公司SHA757-26DNE001防滑/自动刹车目录页次引言 3防滑系统部件 6防滑系统功能 31防滑故障探测 43自动刹车系统 49自动刹车系统功能 61防滑/自动刹车BITE 82532-42-TSHA-069076WFEB 24 1989+374 -2-375-3-引 言防滑/自动刹车1.用途A.防滑防滑系统的用途是监控机轮减速度并松开刹车,以在变化的刹车条件下达到最佳刹车功用。
B.自动刹车自动刹车系统的用途是自动施加并控制刹车压力,以试图达到飞行机组人员所选定的飞机减速度变化率。
2.系统说明A.防滑正常防滑阀和备份防滑阀接受来自正常刹车计量阀或备份刹车计量阀(依据哪一个刹车系统被增压而定)的先导计量刹车.由防滑/自动刹车控制装置控制防滑阀,如果探测到过大的机轮减速度,则松开刹车.由控制装置根据各个机轮速度传感器的输入,产生这一松开刹车信号.控制装置还使用惯性还使用惯性基准系统(IRS)地面速度输入,提供接地或水上滑行防护。
532-42-532-01A Sh 19017WJAN 26 1987+376-4-引 言B.自动刹车防滑/自动刹车控制装置,作动一个自动刹车模件,通过正常防滑阀,向刹车提供经计量的压力。
刹车压力按选定的飞机减速度变化率以及通过刹车、反推力装置和地面减速板的使用所获得的减速度变化率而变化。
532-42-532-01A Sh 29017WJAN 24 1987+377-5-防滑/自动刹车左脚蹬刹车输入备份刹车计量阀正常刹车计量阀左液压系统右液压系统右脚蹬刹车输入备份刹车计量阀正常刹车计量阀惯性基准装置(3处)右液压系统梭阀自动刹车阀模件梭阀备份防滑正常防滑防滑自动刹车控制装置正常防滑备份防滑梭阀传感器(4处)刹车(4处)传感器(4处)梭阀刹车(4处)图例液压钢索/机械电气378-6-概 述防滑/自动刹车部件概略部件位置位于每一主起落架轴内的传感器向位于主设备中心E5-2设备架上的防滑/自动刹车控制装置提供输入。
B757培训电子第三册_7 (415)
C34-55-704-07 Sh 1
-12-
3455i FEB 24 1989 +
64
PDF 文件使用 "pdfFactory Pro" 试用版本创建
概述
B、VOR 控制板 当选定了 VOR 方式时,用 VOR 控制板上的旋钮人工选定的 VOR 频 率即传送到 DME。此选定的频率示于- LCD 显示器上。VOR/DME 电门 ——灯的“M A N (人工)”部分将燃 亮成白 色。 每一 VOR 台都有一个处于同一地点的 DME 台。VOR 频率和 DME 频率 配对。DM E 询问器接收 VO R 频率,并使用一存贮器检查表,确定拟 调谐的实际 DM E 频率。 C、ILS 控制板 当选定 ILS 方式时,用 ILS 控制板上的旋钮由人工选定的 ILS 频 率,途经 VOR 控制板,被传送到 DME 询问器。选定的频率示出 LCD 显示器上。V O R / D M E 电——门灯的“M A N (人工)”部分将燃亮。 DME 询问器接收 ILS 频率,并利用一存贮器检查表,确定拟调谐 的实际 DME 频率。
目录 引言 概述 概述 DME系统
波音飞机公司 波音 75 7
飞机维护培训手册
上海航空公司 SHA 757 - 26D
NE001
测距仪
534-55-TSHA-8
部件位置 DME询问器 DME天线 DME控制和显示 DME系统图 功能说明 DME原理图 维修作法 DME自测试 DME FRM/FIM
页次
在 1025~1150MHZ 间发射;振收频率为 962~1213MHZ。该系统 的作用距离为 0. 1~32 0 海里,动态作用距离能力为 0 ~100 0 节, 且准确度为 0 . 1 ~0 . 3 海里,取决于接受到信号强度。控制输入 字和数据输出字为 32 位 ARINC 429 串行格式。
B757培训电子第三册_7 (411)
-157-FMC -模拟离散输入M 134左飞行管理计算机(E 2-1)减震支柱离散信号导航数据更新起动CAA 规划千克选用程序插针公共地F M C 位置(左)飞机/发电机标识右环控系统组件包右环控系统组件包高/低机翼防冰左隔离阀右整流罩防冰右切断阀左发动机停车右发电机停车左 系统组件包左环控系统组件包 高/低左切断阀左整流罩防冰自动/人工调谐,副驾驶员VOR自动/人工调谐,副驾驶员DME自动/人工调谐,机长VOR自动/人工调谐,机长DME接地=真航向基准电门M 91左V O R 控制板(P 7)M 92右V O R 控制板(P 7)M10313左环控系统引气配置卡(P 50)M10312右环控系统引气配置卡(P 50)K10238系统1空中/地面继电器(P 36)地面空中K200系统2 控制/地面继电器(P 37)地面控制M10311右发电机转速卡(P50)M 10298左发电机转速卡(P 50)M 93右E F I S 控制板(P 10)全ILS 方式全VOR 方式M 94左E F I S 控制板(P 10)全ILS方式全VOR 方式地=真自动调谐,从属自动/人工调谐,机长D M E 自动/人工调谐,机长V O R飞机/发电机标识F M C 位置(右)自动/人工调谐,副驾驶员DM E自动/人工调谐,副驾驶员VOR左整流罩防冰左切断阀左环控系统组件包,高/低左环控系统组件包左发电机停车程序插针公共地千克选用CAA 规则右发动机停车右切断阀右发电机整流罩防冰左隔离阀机翼防冰右环控系统组件包,高/低右环控系统组件包减震支柱离散信号导航数据库更新起动M 135右飞行管理计算机(E 2-2)1、接地(I L S ,V O R )=自动调谐停止-161-FMC -数字和离散输出F M C “注意”燃亮右EICAS 计算机左E I C A S 计算机右F M C (E 2-2)#1通用输出总线#2通用输出总线EFIS 总线同侧CDU 总线对侧总线CDU 信息离散信号FMC 失效离散信号系统间总线左F M C (E 2-1)系统间总线数据装入器总线对侧CDU 总线同侧CDU 总线EFIS 总线FMC 失效离散信息#2通用输出总线CDU 信息离散信号#1通用输出总线数据库装入器连接器(P 17)左F M C C D U (P 9)右F M C C D U (P 9)左EFI S 计算机(E4-2)左E F I S 符号发生器(E 2-1)中EFIS 符号发生器右EFIS 符号发生器右EICAS 计算机(E 4-2)右F C C (E 2-2)推力管理计算机(E 2-3)右IRS (E2-4)中ERS(E 2-4)左IRS (E2-4)维修控制和显示板左F C C (E 2-1)中F C C (E 2-3)正常备用左DM E (E3-3)左VOR ( E 6 -1)正常左FMC 仪表源选择电门备用右V O R (E 6-1)右DME(E 3-2)正常备用-165-FMC -功能方块图·传感器·AFCS 方式控制板·控制显示装置·推力管理计算机·EFIS 控制板·模拟离散信号·补偿飞行管理控制输入/输出数据管理飞行管理计算机BITE 历史人工(试验按钮)自动-上电-监控BITE/监控航路数据显示数据-格式化-更新-顺序-信息-通告器航路选择-横向-垂直向-修改初始化-位置-性能CDU 功能显示数据引气状态 燃油推力温度导航数据库选择和调谐助航设备计算-位置-速度-高度-风-地速导航功能高度速度性能功能计算垂直飞行剖面-优化速度/高度-极限速度/高度-阶梯爬升提示性能 数据 库-发动机/机体动态-大气剖面显示数据EFIS 功能计算过渡航迹选择显示数据动态/背景选择助航设备阵20最近/2分钟更新显示数据助航设备阵导引功能计算-位置/速度误差-操作指令-推力指令导引缓冲器·有效航路·修改(横向/垂向)·无效航路(横向)调谐数据输入/输出数据管理飞行控制计算机推力管理计算机EFIS 符号发生器EICAS 计算机维修控制和显示板惯性基准装置VOR/DME 系统数字式飞行数据采集装置-169-FMC -导航功能方块图(左/右V O R 控制板)(左,右C D U )空中/地面继电器(左/右A D C )(左,中,右I R U )(左/右I L S )(左,右V O R )(左,右D M E )FMC -导航软件功能自动调谐离散信号遥控调谐请求空中/地面离散信号导引功能EFIS 功能助航设备阵 阵列更新飞机位置,高度助航设备选择无线电位置计算航向信标台偏差航向信标台更新(I L S 进场)方位(θ)距离(P ρ)ρ/ρ(D M E /D M E /I R S )ρ/θ无线电位置加权IRU 位置北,东IRU速度和真航向真空速I R U 垂直速度(已积分)气压校正高度计算总速度矢量飞机位置计算飞机位置(纬度,经度)风分量 漂移 地速飞机高度调谐请求(左,右V O R (左,右D M E )-175-FMC 自动调谐两无线电处于自动调谐无程序规定的助航设备需要程序规定的助航设备无规定的ILS 助航设备规定的I L S 助航设备配置2一无线电自动调谐,一无线电人工调谐无程序规定的助航设备需要程序规定的助航设备规定的助航设备人工调谐规定的助航设备非人工调谐规定的ILS 助航设备无程序规定的助航设备需要程序规定的助航设备检查规定的助航设备是否调谐如果能行,用于RHO/RHO 对如果正确的ILS 频率调谐,凡适用时使用航向信标台更新数据如果对能行,自动调谐规定助航设备并使用RHO/RHO搜索助航设备清单并调谐最佳RHO/RHO 对搜索清单,寻找一台不能与人工调谐助航设备一起使用的助航设备,供RHO/RHO 计算使用如果正确的I L S 频率调谐,凡适用时使用航向信标台更新数据搜索助航设备清单,并调谐最佳RHO/RHO 对,以包括规定的助航设备搜索助航设备清单,并从最佳RHO/RHO 对开始调谐没有R H O /R H O 对,是满意的没有RHO/RHO 对是满意的规定的ILS 未调谐没有R H O /R H O 对是满意的助航设备对不能进行RHO/RHO 导航助航设备对不能进行RHO/RHO 导航规定的ILS 不调谐助航设备对不能进行RHO/RHO 导航规定的助航设备调谐规定的助航设备未调谐显示信息“导航无效-调谐×××”如果能行,将助航设备用作R H O /R H O对将最近的能行的助航设备用于RHO/THETA 导航显示信息“导航无效-调谐×××”,使用R H O /R H O 或R H O /THETA 导航,直到航向信标台更新将程序规定的助航设备用于RHO/THETA 导航将程序规定的助航设备用于RHO/THETA 导航将人工调谐助航设备用于RHO/THETA 导航显示信息 “导航无效-调谐×××”使用RHO/RHO 或RHO/THETA 导航,直到航向信标台更新调谐无线电到规定的导航设备并使用RHO/THETA 导航。
B757培训机电第四册_5(245-318)
527-40-TSHA-062740WFEB 24 1989+波音飞机公司波音757飞机维护培训手册上海航空公司SHA 757—26DNE 001水平安定面目录页次引言 2概述 4部件功能说明安定面手动控制 19液压切断电门 22安装面配平钢索 24滚珠丝杠作动器 26安定面配平控制模件 30电控制器 37工作 54-1-245246引 言水平安定面配平系统1、 用途安定面配平系统通过水平安定面的运动,维持飞机处于纵向配平状态。
2、 系统说明水平安定面是一个可运动的翼面,其提供飞机统俯仰轴的配平。
当飞机过程中飞机重心变化时,改变安定面的功角,以维持飞机纵向姿态。
使安定面前缘向上运动,将提供飞机机头向下配平。
使安定面前缘向下运动,将提供飞机机头向上配平。
在飞行期间下,由下面若干配平方式,维持飞机统俯仰轴的配平:备份手动和—由驾驶员指令,使安定面配平。
手动电配平自动配平方式—自动驾驶(F C C )自动安定面配平。
马赫数配平—当襟翼收上马赫数增大时,安定面自动配平。
速度配平方式—当襟翼未收起时,安定面在低空速下自动配平。
自动安定面配平,马赫数配平和空速配平方式与手动安定面方式相关,并利用共同的系统部件。
527-40-502-012740WJAN 25 1989+-2-247水平安定面配平系统俯仰轴安定面安定面滚珠丝杠组件安定面配平控制模件(2处)ADS —大气数据计算机S A M —安定面配平/升降舵不对称模件FCC —飞行控制计算机-3-248概 述安定面配平系统部件部件概略位置安定面舱通过后机手左侧的检修服务门,可接近安定面舱。
安定面安定面中央段(扭力盒)安装在后安装铰链上并围绕此铰链旋转。
扭力盒与滚珠丝杠螺母万向接头组件相连接,其由滚珠丝杠作动器驱动。
滚珠丝杠组件滚珠丝杠作动器组件由滚珠丝杠齿轮传动,主刹车,两台液压马达以及两个辅助刹车组成。
安定面配平控制模件(S T C M )两个安定面配平控制模件向刹车和马达提供液压输入。
B757培训机电第一册_1(1-40)
-1-1波音飞机公司波音757飞机维护培训手册上海航空公司SHA 757-26D NE.001飞机概述目 录 页次总体布局 2飞机外形尺寸 4飞机重量 6飞机分区系统 8飞机服务 15索引和滑行 18顶起飞机 22复合材料 29结构 38设备中心和控制板 60ESDS (静电放电)装置的处理 67驾驶舱仪表板 70带灯按钮电门 74通信 84551-00-TSHA-065100WJAN 24 1989PRINT DATE MAR 1989-2-2引 言总体布局系统说明概述波音757系双发动机下单翼标准机身飞机,拥有先进的空气动力学、材料、结构和系统。
飞机标识生产线号标识连续生产的757飞机架次。
飞机批号标识具有用户选定变更件和选用件的飞机。
机体号标识除改进更改外无其它变动的飞机和系统。
系列号标识不论型号的总的连续生产架次。
注册号由航空公司所在国的航空营运机构颁发。
SELCAL 选择呼叫为标识某架具体飞机的4字母通信代码。
性能航程、速度和高度是飞行管理系统选定的全变数,以在飞机性能范围内达到所希望的目的地。
构型757飞机具有单通道旅客座位布局,头等舱与旅行级舱的比列是可变的。
这导致大量的可能的座位布局。
足够的货运空间为运载行李和货物能力提供了灵活性。
501-00-503-02C0100WDEC 12 1985-3-3总体布局飞机标识号型号生产线号客户可变批号注册号选择呼叫代码性能航程速度高度构型旅客货物FEB 22 1984 IGS501-00-003-03A-4-4引 言飞机尺寸系统说明飞机的总长、总宽和总高;机身、安定面和发动机之间的距离和角度关系;以及起落架之间的距离,如图所示。
506-11-501-01A0611WDEC 12 1985-5-5发动机短舱中心线JAN 13 1987 IGS506-11-001-01C飞机尺寸-6-6引 言飞机重量系统说明最大滑行总重(MTGW )系指相应政府条例核准的最大地面机动重量。
B757培训机电第三册_9(479-488)
479527-09-TSHA-062709wFEB 24 1989+波音飞机公司波音757飞机维护培训手册上海航空公司SHA 757-26D NE 001控制系统电子装置目录 页次引言 2故障通告 6-1-480飞行控制系统电子装置(C S E U )两个控制系统电子装置(CSEU)安装在主设备中心内,每一CSEU 包含8个模件,其包括两个电源(PSM )和6个操作模件。
6个操作模件包括3个扰流板控制模件。
(S C M ),一个安定面配平升降舵不对称模件(SAM ),一个方向舵比率变换器模件(RRCM )以及一个偏航阻尼器模件(YDM )。
CSEU 彼此独立工作,并且相互不提供余度或备份能力,但SAM 升降舵不对称限制器和速度/马赫数配平功能以及方向舵比率变换器功能除外。
任一个PSM 可满足同一CSEM 内的6个工作模件的电源要求,但不能向另一CSEU 内的模件供电。
CSEU 为选定的扰流板、升降舵、安定面和方向舵功能提供电子控制和失效防护,以及通告。
左和右CSE U 之间,相同的模件是可互换的。
527-09-501-01C2709wAPR 13 1988 +-2-481飞行控制系统电子装置(C S E U )E4-1设备架前E3-1设备架电子/电气设备检修门主电子设备中心1.左NO.1能源模件,M5362.左NO.1扰流板控制模件,M5303.左方向舵比率变换器模件,M5284.左NO.2扰流板控制模件,M5315.左安定面配平/升降舵不对称限位模件,M5246.左偏航阻尼器模件,M5227.左NO.3扰流板控制模件,M532 8.左NO.2电源模件,M537 9.右NO.1电源模件,M53810.右NO.1扰流板控制模件,M53311.右方向舵比率变换器模件,M52912.右NO.2扰流板控制模件,M53413.右安定面配平/升降舵不对称限位模件,M52514.右偏航阻尼器模件,M52315.右NO.3扰流板控制模件,M53516.右NO.2电源模件,M539(1)(2)(3)(4)(5)(6)(7)(8)(9)(10)(11)(12)(13)(14)(15)(16)-3-482部件详述CSE U 接口1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
489-1-波音飞机公司波音757飞机维护培训手册上海航空公司SHA757—26DNE001副 翼目录 页次引言 3概述 6部件功能说明 15感力、对中、配平 18横向控制超控 22动力控制装置 26位置指示 32工作 40527-11-TSHA-069049WFEB 24 1989+-2-490491-3-引 言副翼1、 用途副翼提供绕飞机纵轴(横滚轴)运动的控制。
2、 系统说明A 、概述由独立液压系统作动的两个能源控制装置(PCU 驱动每一机翼上的单块副翼。
副翼结构为Nomex 蜂窝芯层,带有石墨/环氧蒙皮面板。
每一副翼重约70磅,加上60磅的钨平衡配重。
B 、控制连动杆连接两个驾驶杆,以同时提供双驾驶盘输入,通过双钢索系统,连接至轮舱部件。
连动杆包含一个超控机构,以在左和右钢索系统之间提供脱开能力。
C 、左轮舱部件左钢索系统与作动左机翼钢索系统的感力、对中和配平机构相连接。
连动杆穿过龙骨架与右轮舱部件相连接。
两个自动驾驶伺服机构与感力、对中和配平机构相连接。
527-11-505-01D Sh 12711WMAR 05 1986+492-4-引 言副 翼2、系统说明(续)D 、右轮舱部件与右钢索系统相连接的超控机构,作动右机翼钢索系统,并在左和右钢索系统之间,提供脱开能力。
一个自动自动驾驶伺服机构与过超控机构相连接。
E 、机翼钢索系统机翼钢索系统与超控机构相连接,超控机构与动力控制装置(PCU )输入杆相连接。
由于任一PCU 控制阀内的卡滞,超控机构提供脱开。
位置传感器向EICAS 计算机提供副翼位置信息。
F 、动力控制装置两个PCU 与每一副翼相连接,每一PCU 由不同的液压系统供压。
中央液压系统为每一副翼的内侧PCU 提供输入,同时,由右液压系统向左机翼上的外侧PCU 供压,左液压系统向右机翼上的外侧PCU供压。
527-11-505-01B Sh 22711WDEC 12 1985+493-5-副翼系统连动杆(带有超控)驾驶舱驾驶杆(2处)至超控机构的钢索至右超控机构的钢索PCU 超控机构动力控制装置(2处)副翼(每一机翼1处)位置传感器自动驾驶横向控制(伺服机构3处)超控机构联动杆横滚轴感力、对中和配平机构位置传感器动力控制装置(2处)PCU 超控机构至左超控机构的钢索至感力、对中和配平机构的钢索494-6-概 述驾驶舱副翼部件部件概略位置驾驶盘有一副翼配平指示告示牌和自动驾驶脱开电门。
后端操纵台(P-8)包含副翼配平准备和控制电门。
当在驾驶员显示器选择板(P -8)上选择“状态”时,中央仪表板EICAS 下显示器上将显示副翼位置。
自动驾驶方式控制板(P -55)控制副翼自动驾驶伺服机构。
527-11-503-01A2711WJAN 25 1984+-7-驾驶舱副翼部件自动驾驶脱开(典型)副翼配平装置告示牌驾驶盘杆(2处)自动驾驶方式控制板(P-55)E I C A S(中央仪表板)驾驶员显示选择板(P-9)中央操纵台后端中间操纵台(P-8)495-8-496497-9-概 述副翼控制部件1、部件概略位置A 、前扇形轮前扇形轮位于驾驶舱下面,通过前起落架舱门可接近。
B 、机身钢索通过前货舱门,可接近机身钢索。
钢索通过地板梁铺设,松紧螺套位于货舱门区域附近。
C 、左轮舱感力、对中和配平机构安装在前壁上。
D 、右轮舱超过机构安装在前壁上。
E 、机翼钢索左和右机翼钢索系统沿机翼后梁铺设。
通过左和右轮舱,可接近机翼处的松紧螺套。
松紧螺套刚好左轮舱内感力、对中和配平机构的外侧,超控机构位于右轮舱内。
每一机翼钢索。
通过往返转动滑轮,与副翼扇形轮超控机构相连接。
F 、副翼扇形轮超过机构机构安装在机翼后梁上,在每一副翼的内端。
G 、动力控制装置(P C U )两个P CU 是安装在机翼后梁上的轴颈,杆端与副翼前缘相连接。
反作动联杆也固定在轴颈和副翼之间。
527-11-504-01C Sh 12711WJUN 10 1986+498-10-概 述副翼控制部件1、部件概略位置H 、位置传感器位置传感器安装在机翼后梁上,刚好在副翼扇形轮超控机构的内侧,而控制杆使传感器与副翼相连接。
传感器输出直接给EICAS 计算机。
2、系统概略特点A 、前扇形轮连动杆力限制器(弹簧作动筒)与扇形轮相连接,扇形轮分别与左和右副翼机身钢索相连接。
包容扰流板系统旋转可变差动传感器(RVDT )的罩壳与每一前扇形轮相连接。
B 、左轮舱感力、对中、配平机构使左机身钢索系统与左机翼钢索系统相连接。
控制连动杆使右轮舱内的机构与右机翼钢索系统相连接。
C 、右轮舱超控机构使右机身钢索系统与右机翼钢索系统相连接。
控制连动杆使机构与感力、对中、配平机构和左机翼钢索系统相连接。
D 、副翼扇形轮超控机构两个半爿的扇形轮与机翼钢索系统相连接,并通过控制杆与两个动力控制装置上的输入杆相连接。
527-11-504-01B Sh 22711WDEC 12 1985+8K-11-499500-12-概 述副翼与驾驶盘偏转关系概略工作最大配平效能(6个单位):驾驶盘30°自动驾驶仪最大效能:驾驶盘22°——单通道,驾驶盘53°——多通道最大动力控制装置效能:驾驶盘55°。
527-11-516-01B2711WDEC 12 1985+-13-副翼与驾驶盘偏转的关系驾驶盘效能配平30°顺时针(6个单位)自动驾驶单通道22°顺时针多通道53°顺时针左副翼左驾驶盘偏转右副翼向下右副翼右驾驶盘偏转左副翼向上501-14-502503-15-部件功能说明左前控制器和右前控制器1、 用途前控制部件允许在驾驶盘上提供输入,以驱动与轮舱内扇形轮相连接的钢索。
2、 实体说明/特点A 、驾驶杆每一驾驶盘通过主轮舱内的一组伞形齿轮来驱动垂直轴轴带动一万向接头转动。
B 、万向接头在每一轴下端的万向接头,允许进行向前和向后运动(开辟舵输入)和旋转运动(副翼输入)。
“U ”型接头与摇臂组件相连接。
C 、前扇形轮扇形轮由轴承安装在摇臂组件上,并且通过扇形轮上表面上的整体凸耳与结构相接触,将驾驶盘的输入限至到+85。
下表面上两个凸耳将臂组件上的挡块相啮合,以使在传感器(或传送联杆失效)的情况下驱动钢索。
如果使用一传感器来替代自动飞行驾驶盘操纵(CWS)的联杆,凸耳与止动块之间的间隙,允许传感器输出。
D 、摇臂组件摇臂组件通过轴承安装在结构上,并由万向接头驱动.其由传送联杆(或CWS 传感器)与前扇形轮相连接,并通过连动杆力限制器组件与另一侧的摇臂组件相连接。
527-11-506-01A Sh 12711WJAN 25 1984+504-16-部件功能说明左前控制器和右前控制器2、实体说明/特点E 、连动杆力限制器组件利用夹紧系统将驾驶盘输入扭矩限制为25磅,以在控制系统的前端提供脱开点。
F 、RVDT(旋转可变差动传感器)(扰流板)向扰流板控制模件提供电信号G 、振杆器使驾驶杆振动,向驾驶员发出临界失速警告527-11-506-01B Sh 22711WDEC 12 1985+505-17-左前控制器和右前控制器钢索摇臂组件驱动轴连动杆力限制器组件振杆器万向接头钢索钢索旋转可变差动传感器(扰流板)前扇形轮传送联杆钢索前(旋转90°)前内侧连动杆力限制器组件右前扇形轮顶部板万向接头结构挡块传送联杆(或CWS 传感器)摇臂组件结构枢506-18-部件功能说明感力、对中和配平机构1、位置位于左轮舱内,在前隔框上。
2、实体说明由扇形轮、双感力弹簧、凸轮和滚轮、用于横向自动驾驶伺服机构(2处)的连接杆接头以及连动杆配平作动器所组成。
这些部件由花键安装在共同轴上,但配平作动器连接组件除外,其由轴承固定。
3、工作A 、感力和对中驾驶盘运动时,输入扇形轮转动,带动凸轮、连动杆摇臂和自动驾驶摇臂移动。
滚轮是轴承固定组件的一部分,由配平作动器保持就位,配平作动器固定于结构上。
当凸轮旋转时,迫使滚轮骑在凸轮上,导致弹簧被拉长。
拉动弹簧所需的力反映到驾驶盘上,向系统给出“力的感觉”(在脱开时,线性力为3.5磅,在顺时针85°时增加到15磅)。
当驾驶盘输入压力释放时,弹簧迫使凸轮在滚轮上对中,其使驾驶盘副翼系统返回到中立(已配平)位置。
B 、配平配平作动器的伸出和收进,使包含滚轮的轴承固定装置转动。
当滚轮由弹簧加载到凸轮位置时,凸轮随滚轮运动,因此以与驾驶盘输入相类似的方法,作动整个副翼控制系统。
527-11-509-01A2711WJAN 25 1984+507-19-横向控制感力、对中和配平机构NO .1装配调整销自动驾驶输入杆扇形轮联动杆自动驾驶输入杆配平作动器滚轮双感力弹簧配平作动器NO .1装配调整销凸轮前龙骨梁中心线自动驾驶伺服装置配平作动器508-20-部件功能说明副翼配平控制1、位置配平控制由位于P-8上的2个电门(准备和控制)以及位于左轮舱内的配平马达所组成。
2、工作向手动作动的准备和控制电门(P -8)提供28优直流电源。
必须作动这两个电门,以完成至配平马达的电路。
控制电门的工作,确定作动器的伸出和收进。
配平速率为每秒2.25(驾驶盘)。
最大配平效能为6个单位——驾驶盘30°,副翼偏转13。
527-11-507-01A2711WJAN 25 1984+509-21-副翼配平控制顶部电路断路器板左28伏直流汇流条副翼配平控制M74副翼配平控制左机翼向下关段右机翼向下准备电门控制电门M488副翼配平马达(左轮舱)(伸出)(收进)感力、对中和配平机构(左轮舱)M74副翼和方向舵配平控制板(P8)510-22-部件功能说明横向控制超控机构1、 用途超控机构的用途是在左或右钢索被卡滞的情况下可进行驾驶员驾驶盘输入。
2、 位置位于右轮舱内,在前隔框上。
3、 实体说明由凸轮杆臂,双弹簧、凸轮和滚轮扇轮,输入自动驾驶伺服机构杆和输入连动杆所组成。
4、 工作来自感力、对中和配平机构的连动杆与凸轮杆臂相连接,而凸轮杆臂由轴承安装在超控机构轴上,双弹簧连接在凸轮杆臂和滚轮臂之间,其迫使滚轮保持在凸轮上的卡槽内,扇形轮和凸轮由轮由花键安装在超控机构轴上。
在15磅弹簧力(相加于其它的控制系统力上)作用下,开始脱开(非正常装置)。
这使滚轮带动凸轮扇向上运动,使双弹簧拉伸(最大力为18磅)。
由右或左钢索系统内的卡滞,导致脱开,并且将与前扇形轮连动杆力限制中器组件(弹簧作动筒)的脱开同时出现。
双剪切铆钉驾驶盘处60磅在超控机构卡滞的情况下提供备份防护。
左钢索系统卡滞将导致使副驾驶员盘转动85。
所需的大约43磅力。
右钢索系统内的卡滞将由于感力、对中、配平机构而需要在机长驾驶盘上再上15磅力。