基于蓝牙技术的小车智能控制系统设计
循迹避障蓝牙小车设计思路与方案
循迹避障蓝牙小车设计思路与方案近年来,随着科技的飞速发展,智能机器人逐渐走进我们的生活。
其中,循迹避障蓝牙小车成为了人们关注的焦点之一。
它不仅可以通过循迹技术实现沿指定路径行驶,还能够通过避障技术避免与环境中的障碍物发生碰撞。
本文将介绍循迹避障蓝牙小车的设计思路与方案。
一、硬件设计1. 主控模块:选择一块性能稳定、功能丰富的主控板,如Arduino Uno。
它具有较强的扩展性,能够满足蓝牙通信和传感器接口的需求。
2. 电机驱动模块:选择合适的电机驱动模块,如L298N。
它能够提供足够的电流和电压来驱动小车的电机。
3. 电机:选择高性能的直流电机,根据小车的重量和所需速度进行合理选择。
4. 轮胎:选择具有较好摩擦力和抓地力的轮胎,以确保小车能够稳定行驶。
5. 循迹模块:选择适用的循迹模块,如红外传感器或巡线传感器。
它可以通过检测地面上的黑线来实现循迹功能。
6. 避障模块:选择合适的避障模块,如超声波传感器或红外避障传感器。
它可以通过检测前方的障碍物来实现避障功能。
7. 电源模块:选择合适的电源模块,如锂电池或干电池。
它能够为整个系统提供稳定的电源供应。
二、软件设计1. 循迹算法:利用循迹模块检测地面上的黑线,通过编程实现小车沿着指定的路径行驶。
可以采用PID控制算法来调整小车的转向角度,保持在黑线上行驶。
2. 避障算法:利用避障模块检测前方的障碍物,通过编程实现小车避开障碍物。
可以采用距离测量和路径规划算法来确定避障的方向和距离。
3. 蓝牙通信:通过蓝牙模块与手机或电脑进行通信,实现对小车的控制和监控。
可以编写相应的手机应用或电脑软件来实现远程控制和实时监测。
三、系统集成1. 连接硬件:将主控模块、电机驱动模块、电机、循迹模块、避障模块和电源模块按照设计连接起来,确保各模块正常工作。
2. 编程调试:编写相应的程序代码,并进行调试。
通过串口或无线通信方式将程序烧录到主控模块中,保证系统的稳定性和可靠性。
基于手机APP蓝牙控制的智能小车设计及调试

基于手机APP蓝牙控制的智能小车设计及调试作者:杨敏来源:《广东教育·职教版》2018年第01期一、引言随着科技的发展进步和人民生活水平的不断提高,智能手机正在飞速发展。
手机已成为人民生活中的依赖品,它集通信、生活、娱乐于一体,给生活带来极大的方便,一机在手,万物尽在掌握之中。
为结合科技与教学,激发学生课堂上的兴趣,本文就手机APP蓝牙控制智能小车实例介绍,通过借助手机APP平台,运用蓝牙技术,实现用手机对小车实时遥控完成前进、后退、左转、右转、停止等动作,生动形象,有利于促使学生对科技与生活结合的理解,同时也为生活上的遥控玩具和智能家居的制作提供新的路径。
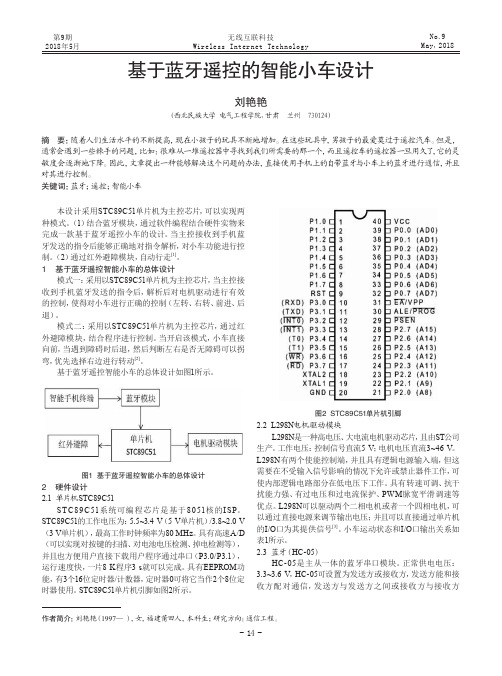
二、系统设计(一)设计总思路本设计的小车系统以STC89C52单片机为核心,以手机APP屏幕界面的按钮遥控小车的转动,中间采用蓝牙技术作为客服端发送接收数据,单片机根据HC-05为蓝牙接收模块接收到的数据信号指令进行分析处理,输出对应的指令信号,再由L298驱动电路相应的小车电机正、反转,实现控制小车的前进、后退、左转、右转和停止等动作,同时显示电路显示对应用的动作码。
电源提供给单片机5V直流电,L298需要从外部接两个电压,分给电机和L298芯片。
设计总电路结构框架图如图1所示。
(二)设计功能本系统能自行设计手机APP,并能借助蓝牙技术传输命令,通过手机APP的控件控制小车的前进、后退、左转、右转、停止等动作,实现了手机APP与单片机通过蓝牙技术实现了有机结合,操作简便有趣。
三、硬件设计(一)单片机及电机主电路本系统以STC89C52单片机为主控单元,STC89C52单片机是一种8K字节可编程可擦除只读存储器的微处理器,具有高速、电压低、功耗低、抗干扰能力强等特点的单片机,简单、廉价、实用。
整个小车系统采用了4轮驱动,使用L298N芯片电机驱动模块实现对左右两组电机的实时驱动控制;L298N驱动模块采用ST公司原装全新的L298N芯片,具有工艺、稳定性高的特点,其控制端口共有六个,通过与单片机的I/O连接,将接收单片机I/O口的高低电平信号即可驱动控制电机的正、反转以及停止的操作。
基于手机蓝牙接口的小车遥控系统

第4期基于手机蓝牙接口的小车遥控系统谈敏,刘高平,陈红良(浙江万里学院,浙江宁波315100)摘要:本文介绍了一种基于手机蓝牙接口的小车遥控系统。
该系统主要分为手机遥控模块、蓝牙收发模块、电机驱动模块三部分。
文章首先介绍了系统硬件设计,然后分别阐述了手机软件与单片机软件的实现方法,最后给出了具体的测试结果。
关键词:蓝牙;小车;手机;遥控中图分类号:TP273.5文献标识码:A 文章编号:1671-2250(2012)04-0077-04收稿日期:2012-04-17基金项目:浙江省公益性技术应用研究计划项目(编号:2011C21035);浙江省重点科技创新团队计划项目(编号:2010R50009)。
作者简介:谈敏(1989-),男,浙江建德人,浙江万里学院通信工程系2008级本科生。
通信作者:刘高平(1964-),男,江西南昌人,浙江万里学院电子信息学院副教授,研究方向:电子通信技术。
236Vo1.23No.62010年11月November 2010Journal of Zhejiang Wanli University浙江万里学院学报第25卷第4期Vo1.2542012年7月July 20121引言近年来蓝牙技术已经发展成为最先进的无线网络技术,具有成本低、功耗小、抗干扰性好、建立连接灵活等优点[1],以蓝牙技术为核心的无线通信技术被大量地应用于人们的生产、生活中,使得原本设备间用于数据传输的连接电缆变成了无线信道,例如耳机、PDA 、打印机、鼠标、键盘、游戏操纵杆以及其它数字设备中命令或数据传输都大量采用蓝牙传输技术。
目前,市场上销售的智能遥控车五花八门,遥控小车一般都采用高频电子器件组成的振荡电路和选频电路组成的收发装置进行无线电遥控[2]。
这种遥控方式具有外界干扰大、同类产品易相互影响、对电子器件精度要求高、信号易失真等缺点。
鉴于此,本文采用以蓝牙手机作为遥控器,与小车内无线蓝牙传输模块建立连接,并以蓝牙配对连接的方式建立专用信道,有效地提高系统的抗干扰能力和数据传输的实时性。
蓝牙智能小车系统设计

蓝牙智能小车系统设计
蒋俊;刘天宇;简雨沛
【期刊名称】《信息技术与信息化》
【年(卷),期】2015(0)6
【摘要】随着物联网的兴起,Android手机以其独有的开放性优势正在为人们提供更多优质便捷的技术成果.本课题研究的是基于安卓手机蓝牙控制的智能小车设计,基于手机平台,借助于蓝牙技术,设计和实现了一种无线遥控小车新的解决方案.设计以手机控制平台、蓝牙通讯模块、电机驱动模块等硬件模块组成的遥控小车.完成小车的进、后退、左转、右转、停止等基本运动功能.也为现在的其他小车设计提出了一种新的思路,并且让智能家居的生活成为现实更加进了一大步.完成了通过手机上的蓝牙功能来控制小车行走的软、硬件设计.手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端.客户端采用Eclipse开发环境,JAVA编程,服务端采用单片机控制.双方通过串口进行通信,单片机驱动直流电机控制小车行动.实验结果表明,小车可以接收手机遥控信号并灵活地进行前行、倒退、左转、右转和停止等功能.【总页数】2页(P166-167)
【作者】蒋俊;刘天宇;简雨沛
【作者单位】西南交通大学电子信息工程重庆 611756
【正文语种】中文
【相关文献】
1.基于手机蓝牙的智能小车控制系统设计 [J], 吴伯彪;郭禧斌
2.基于单片机和蓝牙控制的智能小车设计 [J], 郭昊坤
3.基于Arduino平台的蓝牙智能小车开发 [J], 曹素红
4.基于蓝牙控制技术的智能小车控制系统设计 [J], 温芮; 陈锦鸿; 王丽
5.基于Arduino平台的蓝牙智能小车开发 [J], 曹素红
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机和蓝牙控制的智能小车设计

基于单片机和蓝牙控制的智能小车设计郭昊坤【摘要】本文设计了一种以智能手机为平台控制小车的控制系统,该系统以蓝牙为通信模块,手机通过蓝牙发送信号给小车上的蓝牙模块,从而驱动电机实现小车各种运动,提供了一种无线遥控小车的新思路.设计了该系统的硬件与软件,并进行联机调试,调试结果正确有效.结果显示:小车可以接收手机发出的信号,并且可以灵活的执行前进、后退、左转、右转、停止等实时控制功能.【期刊名称】《电子测试》【年(卷),期】2019(000)011【总页数】3页(P27-29)【关键词】智能手机;蓝牙;单片机;智能小车【作者】郭昊坤【作者单位】江阴职业技术学院电子信息工程系,江苏无锡,214405【正文语种】中文0 引言随着科技水平高速发展,各式各样的智能设备走进了人们的日常生活,各类智能家用电器在现代家庭的使用比例逐渐升高。
但这些智能家电的遥控器各式各样,并不能通用,给人们的使用带来了不便。
同时,在中国,智能手机的使用已非常普遍,因此用智能手机当作遥控器对各类家电进行控制越来越受到大家的关注[1-3]。
本文设计了一种基于单片机和安卓手机蓝牙控制的智能小车系统,实现了手机对小车的遥控设计,正确有效,且该系统只需将某些模块稍作改动即可控制其它家用电器,方便快捷。
1 总体方案设计该系统通过智能手机和小车上的蓝牙模进行通信,从而实现小车上的单片机来控制电机驱动实现小车的前进、后退、左转、右转和停止。
蓝牙接收模块与手机端的蓝牙连接配对,来接收手机发送过来的蓝牙无线信号,再将该信号传递给单片机,通过单片机来分析传递过来的信号来跳转不同的子程序来控制电机的驱动,从而实现小车各种运动,其总体系统框图如图1所示。
因此,本系统设计主要分为两大部分:一是设计以单片机为主控制器的智能小车系统的软硬件,二是完成智能手机与小车蓝牙模块通信的设计。
图1 系统总体框图2 硬件设计整个系统的硬件设计共有4部分组成:单片机控制模块、电源模块、电机驱动模块以及蓝牙模块。
基于蓝牙遥控的智能小车设计
模式一:采用以STC89C51单片机为主控芯片,当主控接 收到手机蓝牙发送的指令后,解析后对电机驱动进行有效 的控制,使得对小车进行正确的控制(左转、右转、前进、后 退)。
扰能力强、有过电压和过电流保护、PWM脉宽平滑调速等 优点。L298N可以驱动两个二相电机或者一个四相电机,可 以通过直接电源来调节输出电压;并且可以直接通过单片机 的I/O口为其提供信号[3]。小车运动状态和I/O口输出关系如 表1所示。 2.3 蓝牙(HC-05)
H C - 0 5是 主 从一体的蓝 牙串口模 块。正常供电电压: 3.3~3.6 V,HC-05可设置为发送方或接收方,发送方能和接 收方 配 对 通 信,发 送 方与发 送 方 之 间或 接 收 方与 接 收 方
牙 笔 记 本电 脑、电 脑 加 蓝 牙 适 配 器 、P DA等设备进 行 无 缝连接[4],蓝牙模块如图3所示。
右电机 正转 反转 停 正转 正转 反转
N o .9 M a y,2 018
电机车运动状态 前行 左转
以电机为中心左转 右转
以电机为中心右转 后退
图3 蓝牙模块 2.4 E18-D80NK红外避障
[参考文献] [1]潘永雄.新编单片机原理与应用[M].2版.西安:西安电子科技大学出版社,2008. [2]戴佳,戴为恒,刘博文.51单片机C语言应用程序设计实例精讲[M].2版.北京:电子工业出版社,2008. [3]孙荣高,孙德超.数字温湿度数据记录仪的设计[J].现代电技术,2005(7):74-76. [4]杨永杰,冯军.数字式温湿度传感器SHTI1在尘埃检测仪中的应用[J].电子工程师,2005(8):64-66. [5]李泉溪.单片机原理与应用实例仿真[M].北京:北京航空航天大学出版社,2009.
基于Android和蓝牙控制的智能小车的设计
基于Android和蓝牙控制的智能小车的设计发表时间:2018-01-07T18:39:28.207Z 来源:《基层建设》2017年第30期作者:刘家明[导读] 摘要:随着科学与技术的不断进步,无线控制技术的发展已经遍及于各个领域。
西北民族大学电气工程学院甘肃兰州 730124 摘要:随着科学与技术的不断进步,无线控制技术的发展已经遍及于各个领域。
加上智能手机的兴起,特别是其Android系统,使各种控制系统整合为一体成为可能。
本文基于Android和无线蓝牙技术,设计以Arduino单片机为核心,通过Android手机中的蓝牙串口助手发送指令至蓝牙模块进行存储分析,配合超声波模块、光敏电阻、LED和风扇等,实现小车的前进、后退、左转、右转、停止、后旋、避障、测距、灯控等功能。
关键词:Ardroid;智能小车;蓝牙;智能小车 1 系统总体设计1.1 设计内容智能小车控制系统按功能来分主要包括6个模块:Android蓝牙传输模块、单片机控制模块、电机驱动模块、超声波避障模块、光照感应模块、车灯通风控制模块。
各电子器件、数量及功能说明如下表所示。
2系统软件设计小车控制系统的软件设计在主要应用Android开发,选用Android Studio作为开发工具,用Java语言开发客户端的控制程序,为简洁、快速地实现程序功能。
在App程序操作过程中,App先询问启动手机蓝牙的权限,用于连接HC-06蓝牙模块。
点击App第一个界面中右下角的设置图标,程序就会列出周围当前蓝牙设备和其他可用设备。
选择第左下角的按钮“设置自定义编码”跳转至第二个界面—自定义编码。
根据需要设定不同意义的编码,编码数字的相关说明已在该界面文本框下显示,点击“关于我们”的图片按钮,跳转至作者信息.3 设计步骤本次课程设计—基于Android和蓝牙控制的智能小车在设计过程中可以从两大主线进行:第一,Android App开发;第二,Arduino IDE 编程。
基于手机蓝牙的遥控小车的设计与制作
南华大学电气工程学院《通信原理课程设计》任务书设计题目:基于手机蓝牙的遥控小车的设计与制作专业:电子信息工程学生姓名: 陈鹏学号: 20124470115学生姓名: 唐愉晶学号: 20124470107学生姓名: 任凯学号: 20124470122学生姓名: 赵江哲学号: 20124470125学生姓名: 陈熙学号: 20124470120学生姓名: 陈方方学号:20124470105起迄日期:2015年5月5日指导教师:李圣副教授系主任:陈忠泽教授《通信原理课程设计》任务书[9]赵全利,肖兴达 . 单片机原理及应用教程[M].北京: 机械工业出版,2007, 6.[10]金纯 ,林金朝. 蓝牙协议及其源代码分析[M].北京: 国防工业出版社,2006, 6.[11]黄智伟 .基于NI Multisim的电子电路计算机仿真设计与分析(修订版)[M].北京:电子工业出版社,2011, 6.[12]孙屹 ,戴妍峰 . SystemView通信仿真开发手册[M].北京:国防工业出版社,2004,11.[13]刘斌.JavaME使用详解——用Eclipse进行移动开发[M].北京: 电子工业出版社,2007,2.4.课程设计工作进度计划:序号起迄日期工作内容1 2015.5.5 系统方案设计2 2015.5.10 利用EDA软件进行仿真设计,软件设计3 2.15.6.1 硬件设计、调试和测量,排除故障,分析实验结果4 2015.6.25 整理设计报告指导教师李圣日期:2015年 5 月5日附件:《通信原理课程设计》设计说明书格式一、纸张和页面要求A4纸打印;页边距要求如下:页边距上下各为2.5 厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。
二、说明书装订页码顺序(1)任务书(2)论文正文(3)参考文献,(4)附录三、课程设计说明书撰写格式见范例引言(黑体四号)☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆(首行缩进两个字,宋体小四号)1☆☆☆☆(黑体四号)正文……(首行缩进两个字,宋体小四号)1.1(空一格)☆☆☆☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)1.2 ☆☆☆☆☆☆、☆☆☆正文……(首行缩进两个字,宋体小四号)2 ☆☆☆☆☆☆(黑体四号)正文……(首行缩进两个字,宋体小四号)2.1 ☆☆☆☆、☆☆☆☆☆☆,☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)2.1.1☆☆☆,☆☆☆☆☆,☆☆☆☆(楷体小四号)正文……(首行缩进两个字,宋体小四号)图1. 工作波形示意图(图题,居中,宋体五号)(1)……①………………5结论(黑体四号)☆☆☆☆☆☆(首行缩进两个字,宋体小四号)参考文献(黑体四号、顶格)参考文献要另起一页,一律放在正文后,不得放在各章之后。
基于STM32的蓝牙智能小车的设计与实现-任务书
使用STM32作为智能小车的主控制芯片,加入避障传感器或超声波测距模块、蓝牙模块等传感器模块,加入LED灯或蜂鸣器等报警模块组成智能小车.
1.利用传感器的实时采集外部环境信息,并显示各项数值
2.智能模式下可通过传感器采集的信息实现自主行驶
动模式下可通过蓝牙遥控,实现前进后退等操作
基于STM32的蓝牙智能小车的设计与实现任务书
(指导教师用表)
系(部):物理系专业:电子信息工程班级:
学生姓名
指导教师姓名
论文(设计)题目
基于STM32的蓝牙智能小车的设计与实现
下达任务日期
2016.9
任务起止日期
2016.9-2017.6
主要研究内容及方法
利基于STM32的蓝牙智能小车是一款无线遥控的机器人小车,在危险环境作业、人员搜集等应用中可以发挥特殊的作用。蓝牙是一种无线技术标准,可实现固定设备、移动设备和楼宇个人域网之间的短距离数据交换。蓝牙智能小车以轮式结构作为其移动结构,可实现智能模式和手动模式的切换,能够通过内部、外部传感器感知外部环境和自生状态,能实现自主避障,实时反馈信息、手机蓝牙遥控等功能。
完善设计,撰写论文,整理论文,毕业答辩
2017.5-2017.6
任务下达人签名
任务接收人
签名
教研室指导小组组长签名
系部领导小组组长签名
注:1、本表可根据内容续页;2、本表一式两份,学生、系部存档各一份;3、签名需手写,其他内容电子版填写。
主要参考文献
进度安排
各阶段工作任务
起止日期
资料收集整理,了解系统的原理和构成,初步设计
2016.9-2016.11
确定设计方案,给出设计详细实现方法,进行开题报告
基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)
基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)本人一直想做一个遥控车,终于今天实现了,跟大家分享一下。
一、元件清单1、某宝购买一个智能小车底盘(本人车是四驱的,因此有四个电机,两块亚克力板和一些配件螺丝)2、L298n模块两个(一个298控制两个电机)3、HC-06蓝牙模块4、电池盒跟18650电池3个5、单片机最小系统6、杜邦线至少12根,当然越多越好7、若干根导线(连接电机用的,以及电池盒连到L298N跟单片机)二、制作过程首先,先去了解一下L298N的接线,我当时也是懵逼了好久,反正摸索着也会了,一般店家都有资料。
然后是蓝牙模块的使用,拿到蓝牙模块后,有开发板的话(没有就用单片机的烧录器),先按照TXD接TXD,RXD接RXD,打开电脑的串口助手与蓝牙构建通信,打开AT,发送AT指令集,比如设设波特率,改个名字,改个配对的密码。
但通过蓝牙与单片机连接通信的时候,就是TXD接RXD了。
最后一个就是,本人在接线的时候经常碰壁。
比如,你以为接好的线他其实没接好,根本没通,还是拿万用表B了才知道。
因为本人忘了买电池盒,所以我是用12V的直流电接着的,导致遥控车拖着跟电线。
三、实物图(拖着跟电线以及充电宝供电的车不过我没通电)资料内包括L298N的部分资料,以及蓝牙的说明书(看AT指令集就好)和源程序。
app:单片机源程序如下:1./*手机蓝牙遥控小车 APP可以在应用市场搜蓝牙串口助手2.左转右转大概是90度我的是四驱的,如果是只有一个l298N 的话就把带2的删了3.pwm有十级变速*/4.5.6.#include <reg52.h>7.8.#define Left_moto2_pwm P0_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左后轮9.#define Right_moto2_pwm P0_5 //接驱动模块ENB 右后轮10.#define Left_moto_pwm P1_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左前轮11.#define Right_moto_pwm P1_5 //接驱动模块ENB 右前轮12.#define uchar unsigned char13.#define uint unsigned int14.15.sbit P0_4=P0^4; //定义P0_416.sbit P0_5=P0^5; //定义P0_517.sbit P1_4=P1^4; //定义P1_418.sbit P1_5=P1^5; //定义P1_519.20./*电机驱动IO定义*/21.sbit IN1 = P1^2; //为1 左电机反转前轮22.sbit IN2 = P1^3; //为1 左电机正转前轮23.sbit IN3 = P1^6; //为1 右电机正转前轮24.sbit IN4 = P1^7; //为1 右电机反转前轮25./*sbit EN1 = P1^4; //为1 左电机使能26.sbit EN2 = P1^5; //为1 右电机使能 */27.28.sbit IN5 = P0^2; //为1 左电机反转后轮29.sbit IN6 = P0^3; //为1 左电机正转后轮30.sbit IN7 = P0^6; //为1 右电机正转后轮31.sbit IN8 = P0^7; //为1 右电机反转后轮32./*sbit EN3 = P0^4; //为1 左电机使能后轮33.sbit EN4 = P0^5; //为1 右电机使能后轮 */34.35.bit Right_moto_stop=1;36.bit Left_moto_stop =1;37.unsigned int time=0;38.int pwm=1;39.40.#define left_motor_en EN1 = 1 //左电机使能41.#define left_motor_stops EN1 = 0 //左电机停止42.#define right_motor_en EN2 = 1 //右电机使能43.#define right_motor_stops EN2 = 0 //右电机停止44.45.#define left_motor2_en EN3 = 1 //左电机使能后46.#define left_motor2_stops EN3 = 0 //左电机停止后47.#define right_motor2_en EN4 = 1 //右电机使能后48.#define right_motor2_stops EN4 = 0 //右电机停止后49.50.51.#define left_motor_go IN1 = 0, IN2 = 1//左电机正传52.#define left_motor_back IN1 = 1, IN2 = 0//左电机反转53.#define right_motor_go IN3 = 1, IN4 = 0//右电机正传54.#define right_motor_back IN3 = 0, IN4 = 1//右电机反转55.56.#define left_motor2_go IN5 = 0, IN6 = 1//左电机正传57.#define left_motor2_back IN5 = 1, IN6 = 0//左电机反转58.#define right_motor2_go IN7 = 1, IN8 = 0//右电机正传59.#define right_motor2_back IN7 = 0, IN8 = 1//右电机反转60.61.unsigned char pwm_val_left =0;//变量定义62.unsigned char push_val_left =0;// 左电机占空比N/1063.unsigned char pwm_val_right =0;64.unsigned char push_val_right=0;// 右电机占空比N/1065.66.67.void delay(uint z)68.{69.uint x,y;70.for(x = z; x > 0; x--)71.for(y = 114; y > 0 ; y--);72.}73.74.75.76.//蓝牙初始化77.void UART_INIT()78.{79.SM0 = 0;80.SM1 = 1;//串口工作方式181.REN = 1;//允许串口接收82.EA = 1;//开总中断83.ES = 1;//开串口中断84.TMOD = 0x20;//8位自动重装模式85.TH1 = 0xfd;86.TL1 = 0xfd;//9600波特率87.TR1 = 1;//启动定时器188.}89.90./************************************************************************/91.void run(void) //pwm调速函数92.{93.push_val_left =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度94.push_val_right =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度95.if(pwm==10) pwm=0;96.if(pwm==0&&pwm<0) pwm=0;97.98.}99.100.101./******************************************************** ****************/102./* PWM调制电机转速 */ 103./******************************************************** ****************/104.105.106./* 左侧电机调速 */107./*调节push_val_left的值改变电机转速,占空比 */108.void pwm_out_left_moto(void)109.{110.if(Left_moto_stop)111.{112.if(pwm_val_left<=push_val_left)113.{ Left_moto_pwm=1;114.Left_moto2_pwm=1; }115.else116.{ Left_moto_pwm=0;Left_moto2_pwm=0; }117.118.if(pwm_val_left>=10)119.pwm_val_left=0;120.}121.else { Left_moto_pwm=0;Left_moto2_pwm=0; }122.}123./******************************************************** **********/124./* 右侧电机调速 */125.void pwm_out_right_moto(void)126.{127.if(Right_moto_stop)128.{129.if(pwm_val_right<=push_val_right)130.{ Right_moto_pwm=1;131.Right_moto2_pwm=1; }132.else133.{Right_moto_pwm=0;134.Right_moto2_pwm=0;}135.if(pwm_val_right>=10)136.pwm_val_right=0;137.}138.else {Right_moto_pwm=0;Right_moto2_pwm=0; } 139.}140./***************************************************/141.///*TIMER0中断服务子函数产生PWM信号*/142.void timer0()interrupt 1 using 2143.{144.TH0=0XF8; //1Ms定时145.TL0=0X30;146.time++;147.pwm_val_left++;148.pwm_val_right++;149.pwm_out_left_moto();150.pwm_out_right_moto();151.}152.153.//小车前进154.void forward()155.{156.ET0 = 1;157.run(); //pwm 程序158.left_motor_go; //左电机前进159.right_motor_go; //右电机前进160.left_motor2_go; //左电机前进后轮161.right_motor2_go; //右电机前进后轮162.}163.164.void left_go() //左转165.{166.ET0 = 1;167.run();168.left_motor_back;169.right_motor_go;170.left_motor2_back;171.right_motor2_go;172.delay(700);173.forward();174.}175.//右转176.void right_go()177.{178.ET0 = 1;179.run();180.delay(50);181.right_motor_back;182.left_motor_go;183.right_motor2_back;184.left_motor2_go;185.delay(700);186.forward();187.}188.//小车左转圈189.void left()190.{191.ET0 = 1;192.run();193.delay(50);194.right_motor_go; // 右电机前进195.left_motor_back; // 左电机后退196.right_motor2_go; // 右电机前进197.left_motor2_back; // 左电机后退198.}199.200.//小车右转圈201.void right()202.{203.ET0 = 1;204.run();205.left_motor_go;206.right_motor_back;207.left_motor2_go;208.right_motor2_back; 209.}210.211.//小车后退212.void back()213.{214.ET0 = 1;215.run();216.left_motor_back;217.right_motor_back; 218.left_motor2_back;219.right_motor2_back; 220.}221.222.//小车停止223.void stop()224.{225.ET0 = 0;226.P1=0;227.P0=0;228.}229.230.231.//串口中断232.void UART_SER() interrupt 4 233.{234.if(RI)236.RI = 0;//清除接收标志237.switch(SBUF)238.{239.case 'g': forward(); break;//前进240.case 'b': back(); break;//后退241.case 'l': left(); break;//左转圈242.case 'r': right(); break;//右转圈243.case 's': stop(); break;//停止244.case 'z': left_go(); break;//左转行驶245.case 'y': right_go(); break;//右转行驶246.case 'p': pwm++;break; //加速247.case 'c': pwm--;break; //减速248.}249.250.}251.}252.253.void main()254.{255.TMOD=0X01;256.TH0= 0XF8; //1ms定时257.TL0= 0X30;258.TR0= 1;259.ET0= 1;260.EA = 1;261.UART_INIT();//串口初始化262.while(1);263.}264.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随着 科技 的发展 ,智 能手 机 已经 全方位 进 入 了 日常 生活 。 由于 安 卓 操 作 系 统 的 实 际 性 和 可 操 作
主控模块
. I _ _一 蓝牙模块
C o r
驱动模块 I
性 ,使其迅速成为智能手机的主流操作系统 。安卓 的最大优点是开源,对于安卓软件的应用开发没有 限制。无 线遥控实现 方法包括 蓝牙 、红外 、射频 等 ,其 中蓝牙 技术 具有 一定 优 势 。 目前 ,蓝 牙技 术 实 现无 线遥 控 越来 越广 泛 ¨ J 。本设 计 以手机 作 为 终端 ,通过蓝牙通信传输指令 ,实现小车的无线智
第1 3卷
第 4期
实验科学与技术
E x p e ime r n t S c i e n c e a n d T e c h n o l o g y
V o L 1 3 No . 4 Au g . 2 0 1 5
2 0 1 5年 8月
基 于 蓝 牙技 术 的 小 车 智 能 控 制 系统 设计
De s i g n o f I n t e l l i g e nt Co n t r o l S y s t e m o f Ve h i c l e Ba s e d o n Bl u e t o o t h
T A N G Y i , J I A N Y i f e i , T A N G Q i a n 。
唐
( 1 .电子科技 大学
溢 ,简毅 飞 ,唐
骞
协 和学 院,福州 3 5 0 1 1 7 )
成都学 院,成都
6 1 1 7 3 1 ; 2 . 福建 师范 大学
摘要 :基 于 C o d e x—M 3内核处理的硬件平 台设计 实现 小车智能控制 ,通过蓝 牙设备 实现 小车的智能行驶。其 系统硬 件主要 由蓝 牙模 块、 电机驱动模块 和 C o d e x —M3处理器芯 片模块构成 ;软件 系统由 S M T 3 2控制处理程序和手机端控制界 面程序组
d i r v e r mo d u l e,C o t r e x—M3 c h i p nd a mo b i l e p h o n e .T h e s o f t w a r e s y s t e m i n c l u d e s t h e c o n t r o l p r o g r a m o n t h e S T M3 2 a n d t h e i n t e r f a c e
成 。实验 测试表明 ,该设计较好地 实现 了手机 蓝 牙控制 小车的智 能行驶功 能。
关 键 词 :蓝 牙通 信 ;S T M3 2芯 片 ;无 线 控 制 文 献 标 志 码 :A d o i :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2— 4 5 5 0 . 2 0 1 5 . 0 4 . 0 1 1 中 图分 类 号 :T P 8 7 2
( 1 .C o l l e g e o f C h e n g d u ,U n i v e r s i t y o f E l e c t r o n i c S c i e n c e a n d T e c h n o l o g y o f C h i n a , C h e n g d u 6 1 1 7 3 1 , C h i n a ;
2 .C o l l e g e o f C o n c o r d ,F u j i a n N o r m a l U n i v e r s i t y ,F u z h o u 3 5 0 1 1 7,C h i n a)
Ab s t r a c t :B a s e d o n t h e h a r d wa r e p l a f t o r m o f C o r t e x—M3 p r o c e s s o r ,t h e i n t e l l i g e n t c o n t ol r s y s t e m o f v e h i c l e i s d e s i g n e d i n t h e p a p e r .
p r o ra g m o f t h e mo b i l e p h o n e .T h e t e s t s h o w s t h a t v e h i c l e h a s b e e n i n t e l l i g e n t l y c o n t r o l l e d b y B l u e t o o t h o f mo b i l e p h o n e s . Ke y wo r d s:b l u e t o o t h c o mmu n i c a t i o n;S TM3 2 c h i p;wi r e l e s s c o n t ol r
I t a c h i e v e d i n t e l l i g e n t d i r v i n g o f v e h i c l e b y t h e B l u e t o o t h o f mo b i l e p h o n e s .T h e h rd a w a r e s y s t e m c o n s i s t s o f Bl u e t o o t h mo d u l e,mo t o r