光电编码器的信号处理电路毕业设计
光电编码器原理及应用电路
光电编码器原理及应用电路————————————————————————————————作者:————————————————————————————————日期:光电编码器原理及应用电路1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90度的脉冲信号。
图1 光电编码器原理示意图根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度的脉冲信号,Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
基于F330D单片机的光电编码器设计与制作

增量式光电编码器没有位置的记忆功能,它从某一参考零点 INT1 开始计数,当意外断电后再上电,它还是从零点开始计数,
如果你对绝对位置有较高要求的话,就应使用绝对式的编码 器。本文介绍的光电编码器从码盘的结构上看属于增量式光 电编码器,它使用机械式码盘,两只红外光电开关,调整安
(b)
图 1 编码器输出脉冲
装位置使光电开关输出两路频率相同,相位相差 90°,相互正交的脉冲串,参见图 1。当编码器的转轴顺时
针转动时输出脉冲如图 1(a),计数器为加法计数;当编码器的转轴逆时针转动时输出脉冲如图 1(b),计数器为
减法计数。这样通过脉冲边沿和电平的检测与识别,再通过计数器不同方向的计数,就可以确定转角的当前
冲双边沿检测功能等等,C8051F330 的内部集成了 8K 的 输出。
Flash 程序存储器和 768 字节的数据存储器,而且 Flash 允许
2008.4 SensorWorld
43
五、程序设计 该程序设计比较简单,整个程序占用存储器空间不到
0.5K,主程序包括初始化程序和主程序链,重点是中断程序 的设计,INT0、INT1 中断程序结构相似,以 INT0 中断程序 为例,介绍一下中断程序结构及程序设计要点,程序框图参 见图 3。
二、设计原理
INT0
光电编码器由于使用的码盘不同,编码器的结构就不同,
通常分为增量式和绝对位置式,绝对位置输出的码盘结构复 INT1
杂,使用的光电开关较多,制作难度高,不采用精密的光刻
技术和激光开关,很难实现,除非你要求的分辨率很低。绝
(a)
对位置式光电编码器的最大优势在于它有绝对位置的记忆功 INT0 能,输出信号与机械位置绝对对应,因此它不怕意外断电。
光电编码器原理及应用电路
光电编码器原理及应用电路————————————————————————————————作者:————————————————————————————————日期:光电编码器原理及应用电路1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90度的脉冲信号。
图1 光电编码器原理示意图根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度的脉冲信号,Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。
光电编码器原理及应用电路
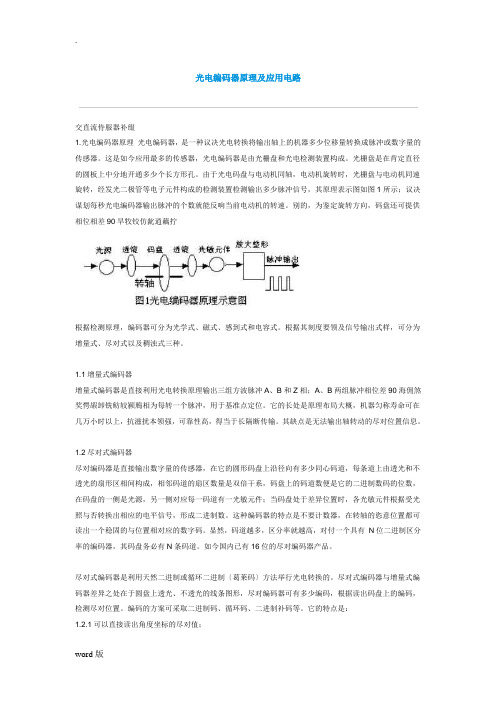
光电编码器原理及应用电路交直流侍服器补缀1.光电编码器原理光电编码器,是一种议决光电转换将输出轴上的机器多少位移量转换成脉冲或数字量的传感器。
这是如今应用最多的传感器,光电编码器是由光栅盘和光电检测装置构成。
光栅盘是在肯定直径的圆板上中分地开通多少个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件构成的检测装置检测输出多少脉冲信号,其原理表示图如图1所示;议决谋划每秒光电编码器输出脉冲的个数就能反响当前电动机的转速。
别的,为鉴定旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧根据检测原理,编码器可分为光学式、磁式、感到式和电容式。
根据其刻度要领及信号输出式样,可分为增量式、尽对式以及稠浊式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。
它的长处是原理布局大概,机器匀称寿命可在几万小时以上,抗滋扰本领强,可靠性高,得当于长隔断传输。
其缺点是无法输出轴转动的尽对位置信息。
1.2尽对式编码器尽对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有多少同心码道,每条道上由透光和不透光的扇形区相间构成,相邻码道的扇区数量是双倍干系,码盘上的码道数便是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于差异位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的恣意位置都可读出一个稳固的与位置相对应的数字码。
显然,码道越多,区分率就越高,对付一个具有N位二进制区分率的编码器,其码盘务必有N条码道。
如今国内已有16位的尽对编码器产品。
尽对式编码器是利用天然二进制或循环二进制〔葛莱码〕方法举行光电转换的。
尽对式编码器与增量式编码器差异之处在于圆盘上透光、不透光的线条图形,尽对编码器可有多少编码,根据读出码盘上的编码,检测尽对位置。
基于CPLD的编码器信号处理电路设计
Circuit Design of Encoder Signal Processing Based on CPLD
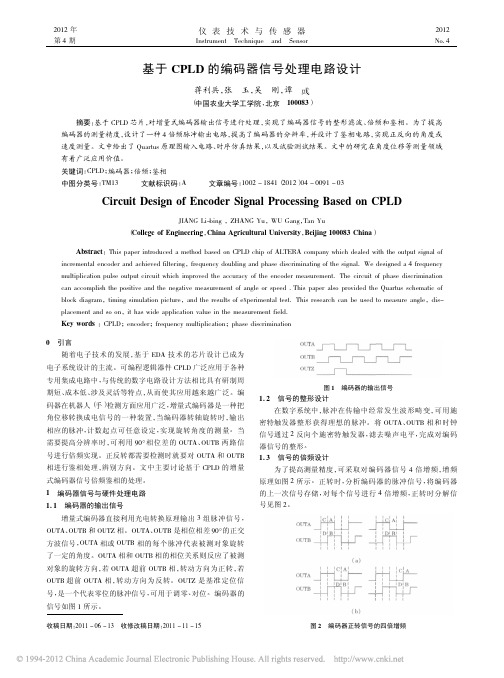
JIANG Libing ,ZHANG Yu,WU Gang, Tan Yu ( College of Engineering, China Agricultural University, Beijing 100083 China) Abstract: This paper introduced a method based on CPLD chip of ALTERA company which dealed with the output signal of incremental encoder and achieved filtering,frequency doubling and phase discriminating of the signal. We designed a 4 frequency multiplication pulse output circuit which improved the accuracy of the encoder measurement. The circuit of phase discrimination can accomplish the positive and the negative measurement of angle or speed . This paper also provided the Quartus schematic of block diagram,timing simulation picture,and the results of experimental test. This research can be used to measure angle,displacement and so on,it has wide application value in the measurement field. Key words : CPLD; encoder; frequency multiplication; phase discrimination 0 引言 随着电子技术的发展, 基于 EDA 技术的芯片设计已成为 电子系统设计的主流。可编程逻辑器件 CPLD 广泛应用于各种 与传统的数字电路设计方法相比具有研制周 专用集成电路中, 期短、 成本低、 涉及灵活等特点, 从而使其应用越来越广泛 。 编 码器在机器人( 手) 检测方面应用广泛, 增量式编码器是一种把 角位移转换成电信号的一种装置 , 当编码器转轴旋转时, 输出 相应的脉冲, 计数起点可任意设定, 实现旋转角度的测量。 当 OUTB 两路信 需要提高分辨率时, 可利用 90° 相位差的 OUTA、 号进行倍频实现。正反转都需要检测时就要对 OUTA 和 OUTB 相进行鉴相处理, 辨别方向。 文中主要讨论基于 CPLD 的增量 式编码器信号倍频鉴相的处理 。 1 1. 1 编码器信号与硬件处理电路 编码器的输出信号 增量式编码器直接利用光电转换原理输出 3 组脉冲信号, OUTA、 OUTB 和 OUTZ 相。OUTA、 OUTB 是相位相差 90° 的正交 OUTA 相或 OUTB 相的每个脉冲代表被测对象旋转 方波信号, 了一定的角度。OUTA 相和 OUTB 相的相位关系则反应了被测 对象的旋转方向, 若 OUTA 超前 OUTB 相, 转动方向为正转, 若 OUTB 超前 OUTA 相, 转动方向为反转。 OUTZ 是基准定位信 号, 是一个代表零位的脉冲信号 , 可用于调零、 对位。 编码器的 信号如图 1 所示。
航天级光电编码器的信号处理系统设计_孙莹
第18卷 第5期2010年5月光学精密工程Optics and P recision EngineeringV ol.18 N o.5 M ay 2010收稿日期:2009-04-23;修订日期:2009-05-25. 基金项目:国家重大工程项目文章编号 1004-924X(2010)05-1182-07航天级光电编码器的信号处理系统设计孙 莹1,2,万秋华1,王树洁1,佘容红1,卢欣然1,梁立辉1,2(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院研究生院,北京100039)摘要:为了实现航天级光电编码器的小型化,减小航天设备的体积、重量并满足其冷备份要求,设计了具有双读数系统的航天级光电编码器信号处理系统。
首先,介绍了双读数系统航天级光电编码器的精码和粗码信号处理方法以及信号处理系统的小型化和可靠性设计;然后,从光电编码器误差产生的原因及空间分布特征出发,对双读数系统航天级光电编码器进行了精度分析;最后,采用比较法,以23位高精度光电编码器作为角度基准,对该光电编码器进行了精度检测。
实验结果表明:应用该信号处理系统的双读数系统光电编码器的分辨力为20 ,精度 30 。
该系统已在工程项目中得到应用,实践表明系统的设计满足航天设备的技术要求。
关 键 词:光电编码器;信号处理;精度分析;双读数系统中图分类号:T P212.12 文献标识码:A doi:10.3788/O PE.20101805.1182Design of signal process system forspaceborne photoelectric encoderSU N Ying 1,2,WAN Qiu -hua 1,WANG Shu -jie 1,SH E Rong -hong 1,LU Xin -ran 1,LIAN G L-i hui1,2(1.Changchun I nstitute of Op tics ,Fine Mechanics and P hy sics ,Chinese A cademy of Sciences,Chang chun 130033,China;2.Graduate Univ ersity of Chinese Academ y of Sciences ,B eij ing 100039,China)Abstract:In order to realize the m iniaturization of spacebo rne photoelectric encoder s,minish the sizes and w eig hts of the spaceflig ht equipment effectively and to satisfy the r equirement of the cold co py of photoelectric co nverting circuits,a sig nal pro cess system is designed for the spaceborne pho to electr ic enco der w ith dua-l reading sy stem.Firstly,the process m ethods of the co arse and precise code sig nals ar e presented for the spaceborne photoelectric encoder w ith dua-l reading sy stem and the miniatur ized and reliable design of the signal process system is descr ibed.Then,the accuracy of the spacebor ne photoelectric encoder w ith dua-l reading system is analyzed based on the erro r sour ces and distribution character istics.Finally,using a 23-bit high precisio n photoelectric encoder as the ang le standar d,the accuracy of the designed pho to electr ic encoder is tested based on a com pariso n m ethod.T he exper-im ent results show that the reso lution and the accuracy of the photoelectric enco der with dua-l reading system are 20 and less than 30 ,respectively.By applying to practical projects,the pr ocess sy stem has satisfied the technique requirement of the spacebo rne equipment.Key words:pho to electric encoder;signal pr ocess;accuracy analy sis;dua-l reading system1 引 言光电编码器以高精度计量圆光栅为位移基准,以光栅莫尔条纹技术为基础,将空间角位移转换为数字信息,具有高分辨力、高精度、高智能化、无接触测量等优点,被广泛应用于国防、工业、生物工程和科技领域的精密测量和实时控制系统中[1-5]。
增量式光电编码器信号处理电路的设计与实现
增量式光电编码器信号处理电路的设计与实现光电编码器是一种常见的位置检测装置,可以通过判断旋转轴的位移来测量出目标位置的具体值。
然而,在某些特殊的应用环境下,需要对光电编码器进行增量式测量,这时通过对编码器的信号进行特殊处理,从而实现精度更高的位置测量。
针对以上需求,本文将介绍一种增量式光电编码器信号处理电路的设计与实现方法。
一、需求分析在进行增量式光电编码器信号处理电路设计前,需要先明确具体的需求。
针对增量式光电编码器的测量要求,我们需要实现以下功能:1. 能够对编码器的信号进行较高频率的采样,以保证精度。
2. 能够处理编码器的A/B相信号,实现增量式测量。
3. 能够对编码器的Z相信号进行特殊处理,以完成一次完整的位置测量。
二、电路设计在明确了需求之后,我们可以开始进行电路设计。
具体的其中关键部分包括定时器、计数器、滤波器等,下面我们对这些部分进行详细介绍。
1. 定时器定时器是整个电路的核心部分,主要负责对编码器信号的采样。
我们可以通过将定时器设置为高频率的时钟源,从而实现对信号的高频采样。
在具体实现时,我们可以使用555定时器,将电容和电阻设置为合适的值,从而得到合适的定时器频率。
2. 计数器计数器负责实现增量式测量。
我们可以通过将A相和B相信号分别连接至计数器的计数端口,从而实现对编码器的增量式测量。
在具体实现时,我们可以使用74LS193计数器芯片进行实现。
3. 滤波器滤波器则负责对编码器的Z相信号进行特殊处理,完成一次完整的位置测量。
具体实现时,我们可以将Z相信号连接至RC滤波器,从而得到平滑的脉冲信号。
接着,将平滑后的脉冲信号连接至脉冲捕捉器,从而完成一次完整的位置测量。
三、实现效果通过以上电路设计,最终可以得到一种高精度、可靠的增量式光电编码器信号处理电路。
在具体实现时,我们需要注意以下几点:1. 设置合适的电路参数值。
2. 使用高品质的电子元器件,以保证可靠性和高精度性。
3. 进行系统调试和测试,以验证电路的稳定性和可靠性。
基于CPLD的编码器信号处理电路设计
U3H C
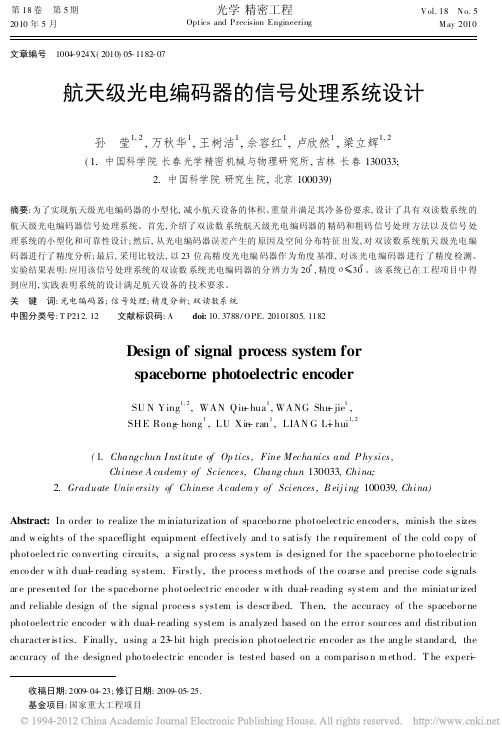
钟信号,输出的波形为一路四倍频的脉冲信号PI几和一路方向 信号DIR. 反转时,B相超前直榴90。,见缉8,输八时钟痿号,输出的
C
波形为一路四倍频后的脉冲信号PUL和一路方向脉冲信号 DIR。仿真波形见图8。
上3试验与分析
试验采用的编码器型号为sc姒一1024BM—G5—24c,使
用双通道的示波器观察信号输出波形。当编码器正转时结果
0引言 随着电子技术的发展,基于EDA技术的芯片设计已成为
om广]n n厂] om厂]厂]厂]广
。咖
厂] 图1编码器的输出信号 1.2信号的整形设计
电子系统设计的主流。可编程逻辑器件cPLD广泛应用于各种 专用集成电路中,与传统的数字电路设计方法相比具有研制周
期短、成本低、涉及灵滔等特点,从而使其应用越来越广泛。编 码器在机器人(手)检测方面应用广泛,增量式编码器是一种把
信号如图I所示。 收稿日期:2们1—06一】3收修改稿日期:2011—1l—15
。tm卅持 一精埘博矿
(a) (b) 圈2编码器正转信号的四倍增频
鼢t辩羚 。m鼾抖
万方数据
IIIsm埘1ent Techniaue蛐d Sen帅r
Apr 2012
则输出函数表达式为:
F.=ABCD+ABCD+AB CD+A BCD
向的测量。 对比仿真结果与试验结果,可见两者是一致的,说明所设
r士
口
D触发器实现信号存储的硬件原理圈
1.4鉴相电路的设计 鉴相电路的硬件原理图见图S。将编码器的信号上拉到高 电平,输人司1个D触发器中,由编码器出来的OUlA、0UrB
计的cPLD软件是正确的,能够实现编码器的倍频鉴相信号处
理。在机器人上采用CPLD能够准确地对4个编码器进行了倍 频、鉴裙和计数.经换算得到足球机器入的运动速度。
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
光电编码器的工作原理和应用电路[指南]
光电编码器的工作原理和应用电路1 光电编码器的工作原理光电编码器(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,因其外部有一个可以左右旋转同时又可按下的旋钮,很多设备(如显示器、示波器等)用它作为人机交互接口。
下面以美国Greyhill公司生产的光电编码器为例,介绍其工作原理及使用方法。
光电编码器的内部电路如图1所示,其内部有1个发光二极管和2个光敏三极管。
当左右旋转旋钮时,中间的遮光板会随旋钮一起转动,光敏三极管就会被遮光板有次序地遮挡,A、B相就会输出图2所示的波形;当按下旋钮时,2、3两脚接通,其用法同一般按键。
当顺时针旋转时,光电编码器的A相相位会比B相超前半个周期;反之,A相会比B相滞后半个周期。
通过检测A、B两相的相位就可以判断旋钮是顺时针还是逆时针旋转,通过记录A或B相变化的次数,就可以得出旋钮旋转的次数,通过检测2、3脚是否接通就可以判断旋钮是否按下。
其具体的鉴相规则如下:1.A为上升沿,B=0时,旋钮右旋;2.B为上升沿,A=l时,旋钮右旋;3.A为下降沿,B=1时,旋钮右旋;4.B为下降沿,A=O时,旋钮右旋;5.B为上升沿,A=0时,旋钮左旋;6.A为上升沿,B=1时,旋钮左旋;7.B为下降沿,A=l时,旋钮左旋;8.A为下降沿,B=0时,旋钮左旋。
通过上述方法,可以很简单地判断旋钮的旋转方向。
在判断时添加适当的延时程序,以消除抖动干扰。
2 WinCE提供的驱动模型WinCE操作系统支持两种类型的驱动程序。
一种为本地驱动程序,是把设备驱动程序作为独立的任务实现的,直接在顶层任务中实现硬件操作,因此都有明确和专一的目的。
本地设备驱动程序适合于那些集成到Windows CE平台的设备,诸如键盘、触摸屏、音频等设备。
另一种是具有定制接口的流接口驱动程序。
它是一般类型的设备驱动程序。
流接口驱动程序的形式为用户一级的动态链接库(DLL)文件,用来实现一组固定的函数称为“流接口函数”,这些流接口函数使得应用程序可以通过文件系统访问这些驱动程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。