三轴机械手设计方案
智能三轴机械手设计
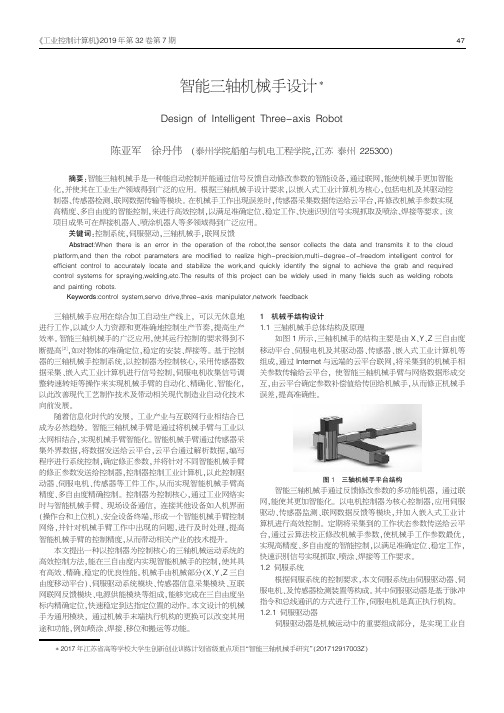
叶工业控制计算机曳圆园员怨年第猿圆卷第苑期三轴机械手应用在综合加工自动生产线上袁可以无休息地进行工作袁以减少人力资源和更准确地控制生产节奏袁提高生产效率遥智能三轴机械手的广泛应用袁使其运行控制的要求得到不断提高咱圆暂袁如对物体的准确定位袁稳定的安装尧焊接等遥基于控制器的三轴机械手控制系统袁以控制器为控制核心袁采用传感器数据采集尧嵌入式工业计算机进行信号控制袁伺服电机收集信号调整转速转矩等操作来实现机械手臂的自动化尧精确化尧智能化袁以此改善现代工艺制作技术及带动相关现代制造业自动化技术向前发展遥随着信息化时代的发展袁工业产业与互联网行业相结合已成为必然趋势遥智能三轴机械手臂是通过将机械手臂与工业以太网相结合袁实现机械手臂智能化遥智能机械手臂通过传感器采集外界数据袁将数据发送给云平台袁云平台通过解析数据袁编写程序进行系统控制袁确定修正参数袁并将针对不同智能机械手臂的修正参数发送给控制器袁控制器控制工业计算机袁以此控制驱动器尧伺服电机尧传感器等工件工作袁从而实现智能机械手臂高精度尧多自由度精确控制遥控制器为控制核心袁通过工业网络实时与智能机械手臂尧现场设备通信袁连接其他设备如人机界面渊操作台和上位机冤尧安全设备终端袁形成一个智能机械手臂控制网络袁并针对机械手臂工作中出现的问题袁进行及时处理袁提高智能机械手臂的控制精度袁从而带动相关产业的技术提升遥本文提出一种以控制器为控制核心的三轴机械运动系统的高效控制方法袁能在三自由度内实现智能机械手的控制袁使其具有高效尧精确尧稳定的优良性能遥机械手由机械部分渊载尧再尧在三自由度移动平台冤尧伺服驱动系统模块尧传感器信息采集模块尧互联网联网反馈模块尧电源供能模块等组成袁能够完成在三自由度坐标内精确定位袁快速稳定到达指定位置的动作遥本文设计的机械手为通用模块袁通过机械手末端执行机构的更换可以改变其用途和功能袁例如喷涂尧焊接尧移位和搬运等功能遥员机械手结构设计员援员三轴机械手总体结构及原理如图员所示袁三轴机械手的结构主要是由载尧再尧在三自由度移动平台尧伺服电机及其驱动器尧传感器尧嵌入式工业计算机等组成袁通过陨灶贼藻则灶藻贼与远端的云平台联网袁将采集到的机械手相关参数传输给云平台袁使智能三轴机械手臂与网络数据形成交互袁由云平台确定参数补偿值给传回给机械手袁从而修正机械手误差袁提高准确性遥
三维机械手抓放装置设计方案设计

三维机械手抓放装置设计方案设计一、设计背景随着机器人技术的不断发展,机械手在工业领域的应用越来越广泛,尤其是对于需要进行抓取和放置操作的场景,三维机械手非常适用。
为了提高机械手在抓取和放置过程中的稳定性和精确性,设计一种三维机械手抓放装置。
二、设计目标1.提高抓取物体的稳定性和精确性;2.优化机械手的工作效率,提高装卸速度;3.设计符合工业生产环境的机械结构,能够适应不同场景的抓取和放置任务需求。
三、设计原理1.采用机械手与抓放装置相结合的方式,通过机械手的运动来实现抓取和放置操作;2.抓放装置采用可调节的夹持力控制系统,能够根据不同物体的形状和重量进行自动调节;3.抓放装置采用传感器来进行精确定位和力的反馈控制,以确保抓取和放置的稳定性和精确性;4.抓放装置设计可灵活调整,以适应不同尺寸和形状的物体。
四、设计步骤及流程1.确定机械手的结构和运动轨迹,并进行仿真模拟,以确定最佳抓取和放置方式;2.设计抓放装置的机构和夹持系统,考虑不同形状和重量的物体;3.配置传感器系统,用于精确定位和力反馈控制;4.进行结构和系统的集成调试,并进行性能测试;5.对设计方案进行优化,提高抓取和放置的稳定性和精确性。
五、预期效果1.抓取和放置操作的稳定性和精确性显著提高;2.提高机械手的工作效率和装卸速度;3.设计方案具有较强的通用性,适应不同场景的抓取和放置任务需求。
六、安全风险及措施1.机械手和抓放装置的运动部分可能存在碰撞风险,需要设计防碰撞装置和传感器;2.抓放装置的夹持力需要合理控制,避免对物体造成损坏;3.设计方案应考虑人身安全,设置安全保护装置和紧急停止按钮。
七、总结设计一种三维机械手抓放装置,能够提高抓取和放置操作的稳定性、精确性和工作效率,满足不同场景的抓取和放置任务需求。
设计方案还应考虑安全风险,并采取相应的措施来保障人身安全和物体的完整性。
最终的设计方案预计能够有效提升机械手在工业生产中的应用效果。
基于PLC的三轴机械手控制系统的设计研究

基于PLC的三轴机械手控制系统的设计研究摘要:为了实现机械供料操作的自动化,需要根据不同的工艺操作,进行机械立体操作。
三轴机械手是智能机械化操作系统的重要部分,本文将根据三轴机械手运行要求,以PLC控制器为核心,详细分析驱动三轴机械智能化移动的设计程序和功能。
通过进行灵活性的程序设计后,机械手可以实现多种轨迹移位操作,一次促进现代化制造业的智能机械技术发展。
关键词:三轴机械手;控制系统;步进驱动;运行轨迹三轴机械手可以实现空间移动操作,可以在各种恶劣环境下稳定运行,更好的满足了实际操作需求吗,完成了人类无法完成的操作。
三轴机械手在制造业广泛应用,而目前市场对其的要求也越来越高,不仅要实现机械手精准定位、牢固抓取,还要实现多元化运动操作。
所以,本文将基于PLC在三轴机械手系统控制中的应用设计,对其自动化驱动,可实现更加复杂的生产操作进行分析和研究。
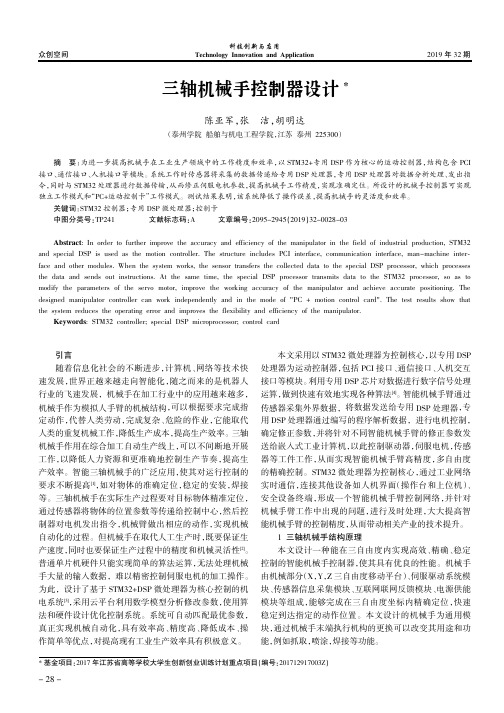
1 三轴机械手设备结构和控制方式三轴机械手设备的结构1.1 三轴机械手平台组成部分包括:X、Y、Z轴移动平台、传感器、工件放置平台、吸盘、步进电机等,详细器械结构见图1.其中PH1、PH2、PH3、PH4、PH5、PH6、PH7、PH8、PH9表示X、Y、Z轴移动平台中传感器获取的原点位置和三轴极限检测信号;M1、M2、M3表示X、Y、Z轴位置的步进电机,主要操控机械手移动位置的;YVI表示吸盘,主要负责移动物料。
图1三轴机械手平台结构2控制系统的方式1.机械手的运动要根据工艺要求进行移动操作,运动轨迹随着工艺做相应变化。
以下是针对两种不同的典型控制工艺进行设计路线分析。
控制方式一:(1)机械手自从进行整个操作周期的循环,在吸取和移动操作中实现从A区将物料移动到B区,同时将物料摆成方形在工件放置台上。
如果在执行过程中按停止操作,这时机械手将停下整个程序操作环节,之后再按启动按键,工序还在停止步骤开始继续运作。
控制方式二:(2)操作流程和方式一相似,而不同的是它会将物料摆放成圆形形状放在操作台上。
三轴机械手控制器设计
2019年32期众创空间科技创新与应用Technology Innovation and Application三轴机械手控制器设计*陈亚军,张洁,胡明达(泰州学院船舶与机电工程学院,江苏泰州225300)引言随着信息化社会的不断进步,计算机、网络等技术快速发展,世界正越来越走向智能化,随之而来的是机器人行业的飞速发展,机械手在加工行业中的应用越来越多,机械手作为模拟人手臂的机械结构,可以根据要求完成指定动作,代替人类劳动,完成复杂、危险的作业,它能取代人类的重复机械工作,降低生产成本,提高生产效率。
三轴机械手作用在综合加工自动生产线上,可以不间断地开展工作,以降低人力资源和更准确地控制生产节奏,提高生产效率。
智能三轴机械手的广泛应用,使其对运行控制的要求不断提高[1],如对物体的准确定位,稳定的安装,焊接等。
三轴机械手在实际生产过程要对目标物体精准定位,通过传感器将物体的位置参数等传递给控制中心,然后控制器对电机发出指令,机械臂做出相应的动作,实现机械自动化的过程。
但机械手在取代人工生产时,既要保证生产速度,同时也要保证生产过程中的精度和机械灵活性[2]。
普通单片机硬件只能实现简单的算法运算,无法处理机械手大量的输入数据,难以精密控制伺服电机的加工操作。
为此,设计了基于STM32+DSP 微处理器为核心控制的机电系统[3],采用云平台利用数学模型分析修改参数,使用算法和硬件设计优化控制系统。
系统可自动匹配最优参数,真正实现机械自动化,具有效率高、精度高、降低成本、操作简单等优点,对提高现有工业生产效率具有积极意义。
本文采用以STM32微处理器为控制核心,以专用DSP 处理器为运动控制器,包括PCI 接口、通信接口、人机交互接口等模块。
利用专用DSP 芯片对数据进行数字信号处理运算,做到快速有效地实现各种算法[4]。
智能机械手臂通过传感器采集外界数据,将数据发送给专用DSP 处理器,专用DSP 处理器通过编写的程序解析数据,进行电机控制,确定修正参数,并将针对不同智能机械手臂的修正参数发送给嵌入式工业计算机,以此控制驱动器,伺服电机,传感器等工件工作,从而实现智能机械手臂高精度,多自由度的精确控制。
精编【机械制造行业】三轴机械手臂的设计

【机械制造行业】三轴机械手臂的设计定稿学号xxxx年xx月xx日xxxxxxxx集团企业有限公司Please enter your company's name and contentv上海交通大学本科毕业论文三轴机械手臂的设计学生:王修法学号:710940170007专业:机械设计制造及其自动化导师:胡晔学校代码:10248上海交通大学网络教育学院二零一三九月毕业论文声明本人郑重声明:1、此毕业论文是本人在指导教师指导下独立进行研究取得的成果。
除了特别加以标注和致谢的地方外,本文不包含其他人或其它机构已经发表或撰写过的研究成果。
对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。
本人完全意识到本声明的法律结果由本人承担。
2、本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。
本人授权上海交通大学网络教育学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。
3、若在上海交通大学网络教育学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担(包括接受毕业论文成绩不及格、缴纳毕业论文重新学习费、不能按时获得毕业证书等),与毕业论文指导老师无关。
作者签名:王修法日期:26.9 2013三轴机械手臂的设计摘要20世纪中叶之后,生产力已高度发展,已有了高度自动化的机械设备。
但由于市场的激烈竞争,只有产品多样化和不断更新换代,才能适应人们更高的现代需要。
1961年美国Unimation公司推出第一部实用的工业机器人,由于它适应柔性自动化要求,因而得到了很快的发展。
今天的机器人已经广泛应用于工业生产上。
机器人的广泛应用,对人类社会的影响决不亚于蒸汽机出现对人类的影响,它极大提高了劳动生产率,提高了产品质量,降低了成本,还极大的减轻了人的劳动强度,改善了劳动条件,所以世界上先进国家都在努力发展机器人技术。
3自由度机械手设计说明书
目录一、确定机械手设计方案 (3)1.1、机械手基本形式和自由度数的选择 (3)1.2、机械手手部夹紧结构方案设计 (4)1.3、机械手的手臂(水平方向和垂直方向)结构方案设计 (4)1.4、机械手的腰座结构方案设计 (4)二、部分执行机构的理论分析和设计计算 (5)2.1、手爪执行机构的分析计算及相关尺寸的确定 (5)2.1.1、手抓的力学分析 (5)2.1.2、手爪夹紧力和驱动力的的计算 (7)2.1.3、液压缸主要参数的确定 (8)2.2、水平手臂的设计和计算 (10)2.3、机身升降机构的计算 (11)2.3.1、手臂偏重力矩的计算 (11)2.3.2、升降不自锁条件分析计算 (12)2.3.3、手臂做升降运动的液压缸驱动力的计算以及相关尺寸的确定 (13)2.4、驱动回转轴回转的电机选型有关参数计算 (15)2.4.1、有关参数的计算 (15)2.4.2、电机型号的选择 (16)2.5、液压传动系统设计 (17)2.5.1、确定液压系统基本方案 (17)2.5.2、拟定液压执行元件运动控制回路 (17)2.5.3、液压源系统的设计 (17)2.5.4、绘制液压系统图 (18)三、机械手控制系统的硬件设计 (18)3.1、机械手工艺过程与控制要求 (18)3.2、机械手的作业流程 (18)3.3、机械手操作面板布置 (19)3.4、控制器的选型 (19)3.5、控制系统原理分析 (20)3.6、I/O地址分配 (20)3.7、PLC原理接线图 (21)四、参考文献 (21)一、确定机械手设计方案1.1、机械手基本形式和自由度数的选择常见的工业机械手根据手臂的动作形态,按坐标形式大致可以分为以下4种: (1)直角坐标型机械手;(2)圆柱坐标型机械手; ( 3)球坐标(极坐标)型机械手; (4)多关节型机机械手。
其中圆柱坐标型机械手结构简单紧凑,定位精度较高,占地面积小。
因为设计要求搬运的棒料的质量达40KG,且直径达160MM,长度大约为250MM,考虑在满足系统工艺要求的前提下,尽量简化结构,以减小成本、提高可靠度。
三自由度机械臂毕业设计
三自由度机械臂毕业设计毕业设计题目:三自由度机械臂设计与控制一、设计背景三自由度机械臂是工业机器人中常见的一种结构,通常由三个关节驱动器构成,可以实现在三个方向上的运动。
该设计旨在研究三自由度机械臂的结构设计和控制算法,提高其运动精度和稳定性,以满足工业生产中对机器人精准操作的需求。
二、设计内容1.机械结构设计:根据机械臂的工作范围和负载要求,设计合适的机械结构,包括三个关节的连杆长度、角度范围等,确保机械臂能够在工作空间内自由灵活地运动,并能承受所需的负载。
2.关节驱动器选择:选择合适的关节驱动器,比如伺服电机、步进电机等,确保驱动器能够提供足够的转矩和精确的控制,以实现机械臂的精准运动。
3.控制系统设计:设计相应的控制系统,包括运动规划、轨迹跟踪、碰撞检测等算法,实现机械臂在各种工作场景下的自动化操作。
同时,考虑到三自由度机械臂的运动学模型,设计合理的控制策略,提高机械臂的运动精度和稳定性。
4.系统集成和调试:将机械结构、关节驱动器和控制系统进行集成,通过实验验证机械臂的性能和稳定性,调试控制算法,不断优化设计方案,使机械臂达到预期的工作效果。
三、设计目标1.实现三自由度机械臂在三维空间内的高精度运动,能够完成各种复杂的工作任务。
2.提高机械臂的运动速度和稳定性,减少运动过程中的振动和误差,提高工作效率。
3.实现机械臂与外部环境的智能交互,通过传感器实时监测工作环境,避免碰撞和危险情况的发生。
4.设计简洁高效的控制系统,具有良好的实时性和可靠性,便于操作和维护。
四、预期成果通过以上设计内容和目标,预期能够完成一台具有高精度运动和稳定性的三自由度机械臂原型机,并实现其在工业生产中的应用。
同时,可以得到相关的技术研究成果,为工业机器人领域的发展贡献一份力量。
五、结语三自由度机械臂的设计与控制是一个具有挑战性和重要性的课题,需要多方面的知识和技能综合运用。
希望通过本次毕业设计,能够全面学习和掌握机械臂设计与控制的相关知识,提升自己在工程领域的实践能力和创新能力,为未来的科研和工作打下坚实的基础。
三坐标气动机械手气动控制回路设计
三坐标气动机械手气动控制回路设计英文回答:Pneumatic Control Circuit Design for Three-Coordinate Pneumatic Manipulator.Introduction.Pneumatic manipulators are widely used in industrial automation due to their advantages of simple structure, low cost, and easy maintenance. The pneumatic control circuit plays a crucial role in ensuring the accurate and reliable operation of the manipulator. This paper presents a comprehensive design of a pneumatic control circuit for a three-coordinate pneumatic manipulator.System Overview.The three-coordinate pneumatic manipulator consists of three pneumatic cylinders, each of which controls onecoordinate axis. The pneumatic control circuit is responsible for providing and controlling the compressedair supply to the cylinders. The circuit includes various components such as solenoid valves, air filters, regulators, and sensors.Circuit Design.The pneumatic control circuit is designed to meet the following requirements:Precise control of cylinder movement.Fast response time.Energy efficiency.Reliability and safety.The circuit employs a double-acting solenoid valve for each cylinder. The solenoid valves are controlled by an electrical signal from the manipulator controller. When thesolenoid valve is energized, it opens the air supply to the corresponding cylinder. When the solenoid valve is de-energized, it exhausts the air from the cylinder.Air filters and regulators are used to ensure the quality of the compressed air supply. The air filters remove impurities from the air, while the regulators adjust the air pressure to the desired level. Pressure sensors are used to monitor the air pressure in the circuit and provide feedback to the manipulator controller.Control Algorithm.The control algorithm for the pneumatic control circuit is based on a proportional-integral-derivative (PID) controller. The PID controller adjusts the opening time of the solenoid valves based on the error between the desired and actual cylinder positions. The PID controller parameters are tuned to achieve optimal performance in terms of accuracy, response time, and stability.Simulation and Experimental Verification.The pneumatic control circuit was simulated using a commercial simulation software. The simulation results showed that the circuit met the design requirements. The circuit was also implemented on a physical manipulator, and the experimental results confirmed the simulation findings.Conclusion.The designed pneumatic control circuit effectively controls the movement of the three-coordinate pneumatic manipulator. The circuit provides precise control, fast response time, and energy efficiency. The circuit is reliable and safe, making it suitable for variousindustrial applications.中文回答:三坐标气动机械手气动控制回路设计。
三轴全气动直角坐标机械手开发-毕业设计任务计划书
毕业设计任务计划书一.学生姓名:朱xx 学号:二.题目:三轴全气动直角坐标机械手开发三.专题题目无四.主要内容:所设计的是一个三轴全气动的机械手,主要用在注塑成型之后,将工件成品取出放到传送带上,整体设计为:Y方向上设置一个定量,即为磁性无杆气缸;X方向的动梁安装在定梁的滑块上,动梁的前后运动由无杆气缸驱动实现;Z方向有一个手臂,用于取工件并放到传送带上,由X方向的气缸驱动做左右移动,由Z方向的气缸驱动做上下移动。
另外,在手臂末端安装一个摆动气缸,用以实现吸盘安装盘的翻转运动。
五.主要(技术)要求:1.CAD图均为施工图,制图,光洁度等标注要符合国家标准;2计算要列出公式,所用单位要符合国家标准;3.论文应写出设备工艺及设备参数;书写格式等要符合学校规定,用学校模板。
六.日程安排:3月05日——3月18日:拟定初选题目,文献调研3月19日——4月01日:确定正式毕设题目,确定总体设计参数及工作方案,校核计算4月02日——4月22日:进行总体计算,绘制零件图及总装图,准备中期答辩4月23日——5月13日:绘制所有零件图,修改订正中期答辩中的不足之处5月14日——5月21日:审核论文,图样,准备答辩七.参考文献:[1] 李允文主编.工业机械手设计.北京:机械工业出版社,1994.[2] 马香峰主编.工业机器人操纵机设计.北京:冶金工业出版社,1990.[3] 蔡自兴主编.机器人学.北京:清华大学出版社,1990.[4] 霍金平主编,黄汉雄,吴舜英编.塑料工业手册.北京:化学工业出版社,2000.[5] 余达太,马香峰等著.工业机器人应用工程.北京冶金工业出版社,1994.[6] 周伯英编著.工业机器人设计.北京:机械工业出版社,1995.[7] ”863”计划机器人技术主题专家组编.机器人博览.北京:中国科学技术出版社,2000.[8] 孙杏初主编.国外典型工业机器人图册.北京:北京航空航天大学,1991.指导教师签字:年月日学生签字:年月日系所负责人章:年月日。
PLC的三自由度机械手控制系统设计方案6
基于PLC的三自由度机械手控制系统设计摘要:伴随着机电一体化在各个领域的应用,机械设备的自动控制成分显得越来越重要,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。
因此机械手就在这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。
其中的工业机械手是近代自动控制领域中出现的一项新技术,它的发展是由于其积极作用正日益为人们所认识:它能部分地代替人工操作;能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;能制作必要的机具进行焊接和装配从而大大改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐为了提高机械手在工业生产中定位的精度,介绍一种基于PLC的三自由度机械手控制系统设计方案。
方案中提出了步进电机在机械手定位应用中的一种新思路,详细论述三自由度机械手控制系统的硬件结构及软件实现方法,并建立M("GS组态环境界面对系统的运行进行监控。
测试结果表明,该系统运行稳定,定位精确,具有较高的应用价值。
关键词:PLC;三自由度;机械手;步进电机;MCGS组态环境引言机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。
三自由度机械手又称3D机械人,能够实现三个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大,灵活性好,应用广泛的特点。
可编程控制器(PLC)是一种专门为工业应用而设计的进行数字运算操作的电子控制装置。
它是以微处理器为核心,综合计算机技术、自动控制技术和通信技术发展起来的一种通用的自动控制装置,它具有结构简单、易于编程、性能优越、可靠性高、灵活通用和使用方便等一系列特性而广泛用于工业控制系统。
步进电机是将电脉冲信号转变为角位移或线位移的开环执行元件。
在非超载情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数目。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三轴机械手设计方案
随着工业自动化技术的快速发展,机械手在现代工业生产中发挥着重要的作用。
三轴机械手是一种常见的机械手型号,其通过三个轴向的运动实现对物体的抓取、传送和放置等操作。
下面是一个三轴机械手的设计方案。
首先,需要确定机械手的尺寸和载荷要求。
根据生产线上的工作环境和物体的尺寸、重量等特性,确定机械手的尺寸和载荷要求。
一般来说,三轴机械手的尺寸较小,适合用于细小物体的操作,而载荷要求一般在1-10kg之间。
接下来,选择合适的执行器和传感器。
执行器负责机械手的运动,可以选择气动、液压或电动执行器。
根据工作环境和精度要求,选择合适的执行器。
同时,为了实现对物体姿态的感知和控制,需要安装传感器,如位置传感器、力传感器和视觉传感器等。
然后,设计机械手的机构。
三轴机械手一般采用串联机构或并联机构。
串联机构由各关节依次连接构成,适用于较大的承载能力要求;而并联机构由几个关节同时作用于执行器,具有较高的刚度和精度,适用于高精度要求的场合。
根据实际需求,选择合适的机构。
此外,需要考虑机械手的控制系统。
控制系统由控制器、控制算法和接口等组成,负责对机械手的运动和姿态进行控制。
控制系统可以使用PLC、单片机或计算机等设备,通过编程实现对机械手的控制。
根据控制要求和预算限制,选择合适的控
制系统。
最后,进行机械手的装配和调试。
按照设计图纸,进行机械手的零部件加工、装配和调试工作。
确保机械手各部件的质量和安装精度,保证机械手的正常运行。
综上所述,三轴机械手设计方案包括确定尺寸和载荷要求、选择执行器和传感器、设计机构、设计控制系统以及机械手的装配和调试。
通过科学合理的设计和精心制造,三轴机械手可以实现对物体的灵活准确的操作,提高生产效率和质量。