基于遗传算法的汽车主动悬架最优PID控制与仿真
基于遗传算法的汽车主动悬架LQR控制器的优化设计
性 能指标 加权 系数 的 直接 决 定其 所 输 出的 最优 控 制 力及 控制 效果 。但 是加 权 系 数选 择 主 要 由设 计 者 的 经验 确定 , 这样 的 “ 最优” 控 制 实 际上 完 全 依 赖 于 设 计者 的经 验 。如果 选 择 不 当 , 虽 然 可 以求 出 最 优 解 却没 有 实际意 义 , 有 时还 可能 得 出错 误 的结论 。另一 方面 , 所选 择的加权 系 数常 常无 法保 证性 能 指标 的最
O 前 言
悬 架 系统是 汽 车结 构 中 的一 个 起 到举 足 轻 重 的
组 成部 分 , 它具体是 指衔接车轮 ( 车桥 ) 与车身 ( 车 架) 的所 有零 部件 的统 称 , 减 震器 和导 向机 构 以及 弹 簧 是 它 的三个 核 心 组 成 部 分 , 是 增 强 车 辆 平 顺 舒 适
Th e Op t i ma l De s i g n o f Au t o mo b i l e Ac t i v e S u s p e n s i o n wi t h LQR Co n t r o l l e r Ba s e d o n Ge n e t i c Al g o r i t h m
Ab s t r a c t :Ai mi n g a t t h e L QR c o n t r o l l e r o f Au t o mo b i l e a c t i v e s u s p e r s i o n, T h e we i g h t e d ma t r i x wa s o p t i —
为 目标 函数 对加权矩 阵进 行优化 , 提高了L Q R控制 器的设计效率 和性能 。仿真 结果表 明基 于遗 传 算法 设计 的 L Q R控制 器减少 了路 面对 车身的振动 冲击 , 提 高了汽车操 作的稳 定性和 乘 坐的舒适性 。 关键 词 : 主动 悬 架 ; L Q R; 遗 传 算法 ; 目标 函数 ; 仿 真 中图分 类号 : U 4 6 1 . 4 文献 标识 码 : B
基于改进萤火虫优化算法的汽车悬架PID控制

基于改进萤火虫优化算法的汽车悬架PID控制
首先介绍了悬架系统的工作原理和PID控制器的基本原理。
悬架系统主要由弹簧和减
振器组成,通过控制减振器的阻尼来调节悬架系统的刚度和减振特性。
而PID控制器则通
过比较实际输出值与期望输出值之间的差异,根据比例、积分和微分的三个控制参数来进
行控制。
然后介绍了萤火虫优化算法的基本原理和改进方法。
萤火虫优化算法是一种启发式搜
索算法,通过模拟萤火虫的行为来寻找最优解。
在传统的算法基础上,我们引入了改进措施,如增加随机因子、调整萤火虫的吸引度函数和更新规则等,以提高算法的搜索效率和
收敛速度。
接着详细介绍了基于改进萤火虫优化算法的汽车悬架PID控制方法。
通过选择适当的
性能指标,如车辆的垂直加速度和车身倾斜角度,来评估悬架系统的控制效果。
然后,在
萤火虫优化算法的基础上,通过优化PID控制器的三个控制参数,来使悬架系统的动态响
应和稳定性得到改善。
随后进行了仿真实验,验证了基于改进萤火虫优化算法的汽车悬架PID控制方法的有
效性。
实验结果表明,该方法能够显著提高悬架系统的控制效果,减小车辆的垂直加速度
和车身倾斜角度,提高行驶的舒适性和稳定性。
对研究结果进行了总结和展望。
本文基于改进萤火虫优化算法的汽车悬架PID控制方
法在提高悬架系统控制效果方面取得了一定的成果。
该方法仍然存在一些不足之处,如算
法的收敛速度和适用范围有待进一步改进。
未来的研究可以将其与其他优化算法结合起来,进一步提高悬架系统的控制性能。
基于遗传算法的PID参数优化毕业设计(论文)
本科生毕业设计(论文)论文题目:基于遗传算法的PID参数优化毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于遗传算法的汽车主动悬架LQG控制器的设计
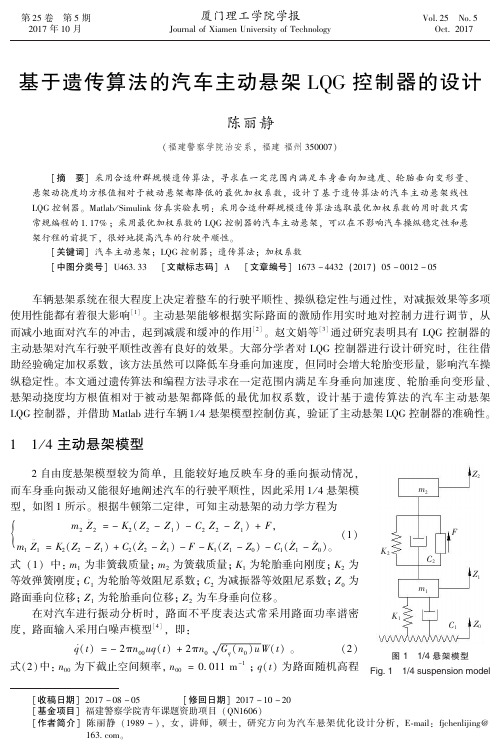
㊀第25卷㊀第5期厦门理工学院学报Vol.25㊀No.5㊀㊀2017年10月JournalofXiamenUniversityofTechnologyOct.2017㊀㊀[收稿日期]2017-08-05㊀㊀㊀㊀[修回日期]2017-10-20[基金项目]福建警察学院青年课题资助项目(QN1606)[作者简介]陈丽静(1989-),女,讲师,硕士,研究方向为汽车悬架优化设计分析,E⁃mail:fjchenlijing@163 com㊂基于遗传算法的汽车主动悬架LQG控制器的设计陈丽静(福建警察学院治安系,福建福州350007)[摘㊀要]采用合适种群规模遗传算法,寻求在一定范围内满足车身垂向加速度㊁轮胎垂向变形量㊁悬架动挠度均方根值相对于被动悬架都降低的最优加权系数,设计了基于遗传算法的汽车主动悬架线性LQG控制器㊂Matlab/Simulink仿真实验表明:采用合适种群规模遗传算法选取最优加权系数的用时数只需常规编程的1 17%;采用最优加权系数的LQG控制器的汽车主动悬架,可以在不影响汽车操纵稳定性和悬架行程的前提下,很好地提高汽车的行驶平顺性㊂[关键词]汽车主动悬架;LQG控制器;遗传算法;加权系数[中图分类号]U463 33㊀[文献标志码]A㊀[文章编号]1673-4432(2017)05-0012-05车辆悬架系统在很大程度上决定着整车的行驶平顺性㊁操纵稳定性与通过性,对减振效果等多项使用性能都有着很大影响[1]㊂主动悬架能够根据实际路面的激励作用实时地对控制力进行调节,从而减小地面对汽车的冲击,起到减震和缓冲的作用[2]㊂赵文娟等[3]通过研究表明具有LQG控制器的主动悬架对汽车行驶平顺性改善有良好的效果㊂大部分学者对LQG控制器进行设计研究时,往往借助经验确定加权系数,该方法虽然可以降低车身垂向加速度,但同时会增大轮胎变形量,影响汽车操纵稳定性㊂本文通过遗传算法和编程方法寻求在一定范围内满足车身垂向加速度㊁轮胎垂向变形量㊁悬架动挠度均方根值相对于被动悬架都降低的最优加权系数,设计基于遗传算法的汽车主动悬架LQG控制器,并借助Matlab进行车辆1/4悬架模型控制仿真,验证了主动悬架LQG控制器的准确性㊂1㊀1/4主动悬架模型Z 2m 2Z 1Z 0C 1C 2m 1K 1K 2F图11/4悬架模型Fig.11/4suspension model2自由度悬架模型较为简单,且能较好地反映车身的垂向振动情况,而车身垂向振动又能很好地阐述汽车的行驶平顺性,因此采用1/4悬架模型,如图1所示㊂根据牛顿第二定律,可知主动悬架的动力学方程为m2Z㊆2=-K2(Z2-Z1)-C2Z㊃2-Z㊃1)+F,m1Z㊆1=K2(Z2-Z1)+C2(Z㊃2-Z㊃1)-F-K1(Z1-Z0)-C1(Z㊃1-Z㊃0)㊂{(1)式(1)中:m1为非簧载质量;m2为簧载质量;K1为轮胎垂向刚度;K2为等效弹簧刚度;C1为轮胎等效阻尼系数;C2为减振器等效阻尼系数;Z0为路面垂向位移;Z1为轮胎垂向位移;Z2为车身垂向位移㊂在对汽车进行振动分析时,路面不平度表达式常采用路面功率谱密度,路面输入采用白噪声模型[4],即:̇q(t)=-2πn00uq(t)+2πn0Gq(n0)uW(t)㊂(2)式(2)中:n00为下截止空间频率,n00=0.011m-1;q(t)为路面随机高程㊀第5期陈丽静:基于遗传算法的汽车主动悬架LQG控制器的设计位移;Gq(n0)为路面不平度系数;W(t)为均值为零的高斯白噪声㊂2㊀悬架LQG控制器设计2 1㊀LQG控制器模型的建立结合式(1),选取状态变量X=[Z2Z㊃2Z1Z㊃1],控制输入U=F,干扰变量W=[Z0Z㊃0],将模型整理成包含干扰量的矩阵形式:X㊃=AX+B1U+B2W㊂(3)因此A=0100-K2m2-C2m2K2m2C2m20001K2m1C2m1-(K1+K2)m1-(C1+C2)m1éëêêêêêêêùûúúúúúúú,B1=01m20-1m1[]T,B2=000K1m1000C1m1éëêêêêùûúúúúT㊂㊀㊀LQG控制器就是寻求控制向量U,使得目标函数JA达到极小,从而实现最优控制㊂性能指标JA为车身垂直加速度㊁轮胎动变形以及悬架动挠度的加权平方和在时域T内的积分值[3],即:JA=lim1TʏT0{ρ1Z㊆22+ρ2(Z1-Z0)2+ρ3(Z2-Z1)2}dt,(4)式(4)中:ρ1为车身垂向加速度加权系数;ρ2为轮胎变形量加权系数;ρ3为悬架动挠度加权系数㊂将式(4)整理成标准的二次型为JA=lim1TʏT0(XTQX+UTRU+2XTNU+2XTHW+WTTW)dt㊂(5)因此Q=ρ1A(2,:)TA(2,:)+ρ2aT11a11+ρ3aT22a22,R=ρ1(1m2)2,N=ρ1m2A(2,:)T㊂其中A(2,:)表示由矩阵A第二行组成的1ˑ4矩阵,a11=[0,0,1,0],a22=[1,0,-1,0]㊂为选取合适的主动悬架LQG控制器,采用lqr函数进行求取,可以简单迅速并可借助Matlab实现仿真获得较好的性能指标,Matlab中的lqr函数如式(6)所示㊂[K,S,E]=lqr(A,B1,Q,R,N)㊂(6)㊀㊀因此,控制输入U可以转化为与状态变量X相关的表达式,即U=-KX,可将式(3)转为X㊃=(A-B1K)X+B2W㊂2 2㊀加权系数的选取在主动悬架LQG控制器设计中,加权系数的选取表明了设计者对悬架性能的倾向㊂将加权系数㊃31㊃厦门理工学院学报2017年作为设计变量x=(ρ1,ρ2,ρ3)T,将有控制主动悬架汽车的车身垂向加速度㊁悬架动挠度㊁轮胎垂向变形量均方根与无控制的被动悬架汽车的比值之和作为目标函数,即f(x)=RMS(Z㊆2zd)RMS(Z㊆2bd)+RMS((Z1-Z0)zd)RMS((Z1-Z0)bd)+RMS((Z2-Z1)zd)RMS((Z2-Z1)bd)㊂(7)式(7)中:RMS(Z㊆2zd),RMS(Z㊆2bd)分别为主㊁被动悬架的车身垂向加速度均方根值;RMS((Z1-Z0)zd),RMS((Z1-Z0)bd)分别为主㊁被动悬架轮胎垂向变形量的均方根值;RMS((Z2-Z1)zd),RMS((Z2-Z1)bd)分别为主㊁被动悬架动挠度均方根值㊂为了保证汽车更好的行驶平顺性㊁操纵稳定性,还需保证主动悬架的车身垂向加速度㊁轮胎垂向变形量和悬架动挠度均方根值均小于被动悬架㊂2 2 1㊀常规编程方法参考文献[5],经过多次仿真,在ρ1ɪ[0,1],ρ2ɪ[1000,150000],ρ3ɪ[100,10000]经过编程可求得满足车身垂向加速度㊁轮胎垂向变形量㊁悬架动挠度均方根值相对于被动悬架都降低情况下的f(x)最小值,加权系数选取流程图如图2所示㊂输入初始值P 1,P 2,P 3ρ1=P 1,ρ2=P 2,ρ3=P 3求出f (x )P =f (ρ1,ρ2,ρ3)P =j ,ρ1=P 1ρ2=P 2,ρ3=P 3P 1<1P 2<150000P 3<100000P 3=100否否是是是是否否P 3=P 3+100输出ρ1,ρ2,ρ3P 1=P 1+0.1P 2=1000P 2=P 2+1000求出j j =f (P 1,P 2,P 3)P >j车身垂向加速度、轮胎垂向变形量、悬架动挠度都小于被动悬架图2加权系数选取流程图Fig.2Flowchart of weighing parameter selection2 2 2㊀遗传算法编程方法借助Matlab自带的ga函数可以快速寻找到最佳的自变量,其语法格式如式8所示㊂[x,fval]=ga(@fitnessfun,nvars,options)㊂(8)式(8)中:x为经遗传进化后自变量最佳染色体返回值;fval为最佳染色体适应值;fitnessfun为适应度句柄函数;nvars为自变量个数㊂3㊀模拟仿真某辆轿车的悬架具体参数为:m1=55kg,m2=337kg,K1=245000N/m,K2=16000N/m,C1=㊃41㊃㊀第5期陈丽静:基于遗传算法的汽车主动悬架LQG控制器的设计3012N㊃s/m,C2=1385.4N㊃s/m㊂采用Matlab模拟该车以u=12m/s在C级路面行驶30s,仿真模型如图3所示㊂图3主被动悬架仿真模型Fig.3Model of active and passive suspension simulationx ′=Ax +Bu y =Cx +Du主动悬架z 2zz 2zz 2jzz 21zz 10z 2jz 21z 10x ′=Ax +Bu y =Cx +Du被动悬架z 01[t,x ]d 11s d 2From workspaceGainIntegrator gain1To workspace12To workspaceTo workspace1To workspace2To workspace3To workspace4To workspace5To workspace6To workspace7+-在其他条件不变的前提下,遗传算法根据种群规模的不同仿真用时有所不同,基本成正比关系,具体如表1所示㊂表1㊀不同种群个体数目仿真对比Table1㊀Simulationindifferentpopulationnumberscompareds种群规模ρ1ρ2/105ρ3/104仿真用时/sRMS(Z㊆2zd)/m㊃s-2RMS((Z1-Z0)zd)/mmRMS((Z2-Z1)zd)/mmf(x)200.51420.73280.77664200.51146.92.12.4820500.45060.64200.658310430.51136.92.12.48151000.59830.85140.870621460.51096.92.12.48131500.40900.58170.601433710.51076.92.12.48122000.54560.77400.821047140.50976.92.12.4812从表1可以看出,随种群个体数目的增加,主动悬架的车身垂向加速度均方根值有微小下降,但相差甚微,轮胎垂向变形量㊁悬架动挠度均方根值基本没有差别㊂常规算法需花约10h仿真,当ρ1=0.5,ρ2=0.71ˑ105,ρ3=0.75ˑ104时车身垂向加速度㊁轮胎垂向变形量和悬架动挠度都小于被动悬架,且目标函数f(x)最小;为更快产生响应,发挥主动悬架作用,现对采用种群规模为20的遗传算法与采用常规算法产生的加权系数LQG主动悬架进行对比,如表2所示㊂表2㊀主被动悬架对比Table2㊀Activeandpassivesuspensioncompared性能指标主动悬架遗传算法常规算法被动悬架车身垂向加速度均方根值/m㊃s-20.51140.51010.7957悬架动挠度均方根值/mm6.96.98.2轮胎垂向变形量均方根值/mm2.12.12.1f(x)2.48202.4813 仿真用时/s42036000由表2可以看出,采用遗传算法计算的加权系数虽然与常规计算的加权系数有些微差距,但是经计算后的车身垂向加速度均方根值㊁悬架动扰度均方根值㊁轮胎垂向变形量均方根值基本一致;相较于被动悬架,都有较大的改善,主动悬架的车身垂向加速度较于被动悬架下降了35%以上㊂对主被动悬架的车身垂向加速度如果直接采用加速度对比图的话,会因数据量较大,难以区分,㊃51㊃厦门理工学院学报2017年频率/Hz51525351020300.070.060.050.040.030.020.010车身垂向加速度功率谱密度/(m ·s -2)2·H z -1被动悬架主动悬架(遗传算法)被动悬架(常规算法)图4车身垂向加速度功率谱密度对比图Fig.4Comparison of vertical acceleration power spectral density因此采用功率谱密度图进行分析㊂在对悬架进行在随机路面上的振动仿真过程中,路面空间频率只需能够覆盖车辆主要部件的固有频率即可,一般取值范围为0.011 2.83m-1㊂因此当汽车以12m/s的速度在C级路面行驶时,其等效的时间频率范围为0 132 33 96Hz㊂被动悬架与主动悬架模型车身垂向加速度功率谱密度对比图如图4所示㊂从图4可以看出,主动悬架车身垂向加速度功率谱密度都小于被动悬架,采用遗传算法和常规算法计算加权系数的主动悬架车身垂向加速度功率谱密度基本一致㊂4㊀结论1)在相对于被动悬架的车身垂向加速度和悬架动扰度以及轮胎垂向变形量均方根值的改善程度基本一致的前提下,采用合适种群规模遗传算法可以快速计算出主动悬架LQG的加权系数,计算时间约为常规算法的1 17%;2)采用最优加权系数的LQG控制器的汽车主动悬架,可以在不影响汽车操纵稳定性和悬架行程的前提下,很好地提高汽车的行驶平顺性㊂[参考文献][1]唐传茵,马岩,赵广耀,等.基于模糊控制策略的车辆主动悬架研究[J].动力学与控制学报,2015,13(3):210⁃214.[2]张春友,张志山,赵宏丽.汽车主动悬架动态特性分析与平顺性分析[J].中国农机化学报,2015,36(2):176⁃179.[3]赵文娟,赵丹平,瞿育文.基于Matlab/Simulink的主动悬架仿真研究[J].现代制造技术与装备,2015(4):10⁃13.[4]陈杰平,陈无畏,祝辉,等.基于Matlab/Simulink的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11⁃15.[5]陈双,宗长富.车辆主动悬架的遗传粒子群LQG控制方法[J].汽车工程,2015,37(2):189⁃193.DesignofanActiveSuspensionLQGControllerBasedonGeneticAlgorithmCHENLijingDepartmentofPublicSecurity FujianPoliceCollege Fuzhou350007 ChinaAbstract AnactivesuspensionLQGcontrollerwasdesignedbasedongeneticalgorithmwithappropriatepopulationsizebyoptimalweighingparameterswhichhadwithinacertainrangereducedverticalaccelerationandverticaltiredeformationandtherootmeansquareofsuspensiondeflectiontothepassivesuspension.ResultsofMatlab/Simulinksimulationexperimentshowthatgeneticalgorithmwithappropriatepopulationsizespendsonlyabout1.17%ofthetimebyconventionalprogramminginselectingoptimalweightingparameters andactivesuspensionwithLQGcontrollerwithoptimalweightingparameterscanimprovetheridecomfortofthevehiclewithoutaffectingthestabilityofthevehicleandsuspensiondeflection.Keywords activesuspension LQGcontroller geneticalgorithm weighingparameter(责任编辑㊀李㊀宁)㊃61㊃。
基于遗传算法的车辆座椅悬架最优控制器的应用

基于遗传算法的车辆座椅悬架最优控制器的应用
孟杰;陈庆樟;张凯
【期刊名称】《机械科学与技术》
【年(卷),期】2013(032)005
【摘要】常规LQG控制器在车辆座椅主动悬架应用中,存在权值矩阵确定的问题.设计了一种基于遗传算法优化LQG权值矩阵的方法.该方法利用遗传算法的全局优化算法,以主动座椅悬架性能指标为目标函数对权值矩阵进行优化设计,并在Matlab/Simulink环境下建立了系统模型并进行仿真模拟.仿真结果表明:基于遗传算法优化的LQG控制器能够解决了最优控制器中存在的权值确定问题,提高悬架的设计效率,同时对于乘坐舒适性的改善有良好的效果.
【总页数】6页(P775-780)
【作者】孟杰;陈庆樟;张凯
【作者单位】常熟理工学院机械工程学院,常熟215500;常熟理工学院机械工程学院,常熟215500;常熟理工学院机械工程学院,常熟215500
【正文语种】中文
【中图分类】U463
【相关文献】
1.基于加速粒子群算法的车辆座椅悬架最优控制研究 [J], 刘杉;孙琪;侯力文;牛宁;孙玲玲
2.车辆悬架和座椅悬架的鲁棒H∞集成控制策略 [J], 张丽萍;郭立新
3.单轨车辆主动悬架模型随机线性最优控制器设计 [J], 赵强;何法;王鑫;景园
4.车辆主动悬架二次型最优控制器权矩阵参数优化 [J], 王鹏飞;杜忠华;马祥;牛坤
5.车辆半主动悬架全状态反馈最优控制器设计 [J], 王万同;周孔亢
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进萤火虫优化算法的汽车悬架PID控制

基于改进萤火虫优化算法的汽车悬架PID控制近年来,随着汽车工业的飞速发展,汽车悬架系统的性能要求也越来越高。
在汽车行驶过程中,悬架系统起到了至关重要的作用,不仅能够保证车身的稳定性和舒适性,还能够提高汽车的操控性能和安全性能。
如何设计一种高效而稳定的汽车悬架PID控制算法变得尤为重要。
传统的PID控制算法是一种经典的控制方法,通过调节悬架系统的阻尼系数、弹簧刚度和质量等参数来实现对汽车悬架系统的控制。
传统的PID控制算法存在着调节参数复杂、易受外界干扰的问题。
为了解决这些问题,本文提出了一种基于改进萤火虫优化算法的汽车悬架PID控制算法。
改进萤火虫优化算法是一种基于自然界萤火虫行为的启发式优化算法,具有全局寻优能力强、收敛速度快等特点。
与传统的PID控制算法相比,该算法能够更好地解决汽车悬架系统参数调节和控制的问题。
具体来说,改进萤火虫优化算法包括以下几个步骤:建立汽车悬架系统的数学模型,包括车身质量、弹簧刚度、阻尼系数等参数。
然后,通过传感器获取汽车悬架系统的实时数据,包括车身加速度、车轮位移等信息。
接着,根据实时数据计算出误差项,并通过PID控制算法计算出控制量。
利用改进萤火虫优化算法对PID控制算法的参数进行调节,从而使汽车悬架系统的控制效果更加理想。
改进萤火虫优化算法的具体步骤如下:初始化萤火虫个体的位置和亮度,其中位置即为PID控制算法的参数。
然后,根据亮度和距离计算出萤火虫个体之间的吸引力,进而更新萤火虫个体的位置。
接着,通过对萤火虫个体之间的位置进行排序,选择亮度最高的萤火虫个体作为全局最优解。
根据全局最优解更新所有萤火虫个体的位置,并更新亮度。
通过反复迭代,使得萤火虫个体逐渐趋向于全局最优解,从而实现对PID控制算法的参数的优化。
通过对实际汽车悬架系统进行仿真实验,结果表明,基于改进萤火虫优化算法的汽车悬架PID控制算法能够显著提高汽车悬架系统的控制性能。
与传统的PID控制算法相比,该算法具有调节参数简单、鲁棒性好等优点。
基于改进萤火虫优化算法的汽车悬架PID控制
基于改进萤火虫优化算法的汽车悬架PID控制汽车悬架系统是汽车重要的组成部分,它对汽车的悬架系统进行稳定性、舒适性以及操控性都有着至关重要的作用。
PID控制是目前常用的控制方法之一,具有简单易用、稳定性好的特点。
而萤火虫优化算法是一种新型的智能优化算法,具有全局寻优能力和较强的鲁棒性。
本文将介绍基于改进萤火虫优化算法的汽车悬架PID控制方法,以期提高汽车悬架系统的性能和稳定性。
一、汽车悬架系统PID控制汽车悬架系统主要是通过对车轮的悬架装置进行控制,使得汽车在运行过程中能够稳定地接触地面,同时达到减震效果和提高乘坐舒适性。
PID控制是一种经典的控制方法,它包括比例项(P)、积分项(I)和微分项(D),能够实现对系统的稳定控制和动态响应。
汽车悬架系统通过PID控制可以实现对悬架的刚度、阻尼等参数进行实时调整,进而达到提高悬架性能的效果。
二、萤火虫优化算法萤火虫优化算法是一种基于自然界萤火虫的求偶行为而提出的一种全局优化算法。
在算法中,萤火虫的亮度表示了其适应度,萤火虫通过模拟自然界中的萤火虫的迁徙行为来实现对问题的全局寻优。
该算法具有快速收敛速度和全局搜索能力强的特点,在求解复杂的优化问题时具有一定的优势。
在汽车悬架PID控制中,通常需要调节的参数包括比例系数Kp、积分系数Ki和微分系数Kd。
改进萤火虫优化算法可以用来优化PID控制器的参数,主要包括以下几个步骤:1. 初始化萤火虫群体:随机生成一定数量的萤火虫个体,并初始化其位置和亮度。
2. 计算亮度和移动:根据个体位置和适应度计算出萤火虫的亮度,并根据亮度来调整萤火虫的移动方向。
4. 选择更新:根据亮度的大小,选择是否更新个体的位置和亮度。
5. 终止条件:当满足一定的终止条件时,算法结束,得到优化后的PID参数。
通过上述步骤,可以利用改进萤火虫优化算法来优化汽车悬架PID控制器的参数,从而使得汽车悬架系统在运行时能够更加稳定和舒适。
在实际的汽车悬架系统中,可以通过传感器实时获取汽车悬架系统的状态,然后利用改进萤火虫优化算法来动态调整PID参数,以实现对汽车悬架系统的实时优化控制。
基于改进单神经元PID控制的车辆主动悬架动力学仿真
Kt(x1 - x0) = 0,
(2)
式中:m1、m2分别为车轮质量和车身质量;Kt、Ks 分
别为车轮刚度、车辆悬架刚度;U 为控制力;x0、x1、
x2分别为路面位移、车轮位移和车身位移;Cs 为悬
架阻尼系数; x1′ 、x1″ 分别为车轮垂直方向速度、加
速度;
x2′
、x
″ 2
分别为车身垂直方向速度、加速度.
ìïR2[ -
a0( y1
-
v( t) )
-
m1x1″ - Ks( x2 - x1) - Cs( x2 ′ - x1 ′) + U +
·78· 兰 州 工 业 学 院 学 报 第 25 卷 ������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
收稿日期: 2018⁃04⁃30 作者简介: 程西伟(1982⁃) ,男,安徽金寨人,工程师.
最优控制策略,设计主动悬架在线时变参数辨识, 实现参数自动调节功能,通过仿真验证车辆输出的 稳定性,较好地改善了车辆行驶的平顺性. 但 是,以 往研究的车辆主动悬架在受到复杂路面随机波形 影响时,其输出的加速度、悬架行程和轮胎位移较 大.对此,本文以 1 / 4 车辆主动悬架平面简图为研 究对象,建立车辆垂直方向动力学方程式,分析了 PID 控制原理, 设计了微分跟踪器结合单神经元 PID 控制器方法,将改进 PID 控制器用于车辆主动 悬架系统控制;在数学软件 Matlab 中,对车身加速 度、悬架行程和轮胎位移进行仿真验证,并与传统 PID 控制方法控制效果进行对比,为车辆行驶的安 全性和舒适性研究提供了参考依据.
基于单轮车辆悬架的Fuzzy-PID控制器设计和仿真
控 制 器进 行 参 数 在 线 修 订 , 计 了基 于单 轮 车 辆 主 动 空 气 悬架 的 F z ~ l 制 器 , 设 uz PD控 y 并对 F z — I 制 的单 轮 车 辆 uz PD控 y
主 动 空 气 悬 架进 行 Ma a d b建模 和 仿 真 试 验 。仿 真结 果 表 明 , 车 辆被 动 空 气 悬 架 、 规 PD控 制 的 车 辆 主 动 空 气 悬 与 常 I 架相 比 ,uz— I Fzy PD控 制 的车 辆 主 动 空 气 悬 架可 大 大 降低 车 身加 速 度 和 悬 架动 行 程 . 高车 辆 乘 坐舒 适性 和操 纵稳 定 提
frv h ce a t e ars s e so , e ma e ao -ie p r me e-e ie t o v n in lP D c n r l rb sn u z e s n n o e i l ci i u p n in w k n l a a t r v s c n e t a I o to e yu i g F z r a o i g v n r o o y a d d sg u z - I n e in F zy P D c n r l r b s d o ige wh e c ie a r s s e so .Usn t b s l k mo ue w k o tol a e n sn l e l a t i u p n in e v ig mal /i i d l , e ma e a mu n
第 l 9卷 第 4期
Vo .9 1 1
No4 .
电子设计 工程
E e to i s n E g n e i g lc r n c De i n i e r g n
2 1 年 2月 01
基于遗传算法的汽车主动悬架LQG控制器的设计
基于遗传算法的汽车主动悬架LQG控制器的设计
陈丽静
【期刊名称】《厦门理工学院学报》
【年(卷),期】2017(25)5
【摘要】采用合适种群规模遗传算法,寻求在一定范围内满足车身垂向加速度、轮胎垂向变形量、悬架动挠度均方根值相对于被动悬架都降低的最优加权系数,设计了基于遗传算法的汽车主动悬架线性LQG控制器.Matlab/Simulink仿真实验表明:采用合适种群规模遗传算法选取最优加权系数的用时数只需常规编程的1.17%;采用最优加权系数的LQG控制器的汽车主动悬架,可以在不影响汽车操纵稳定性和悬架行程的前提下,很好地提高汽车的行驶平顺性.
【总页数】5页(P12-16)
【作者】陈丽静
【作者单位】福建警察学院治安系, 福建福州350007
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于遗传算法的汽车主动悬架LQR控制器的优化设计 [J], 刘晓培
2.基于遗传算法和LQG控制的汽车半主动悬架结构和控制参数的集成优化研究[J], 王启瑞;朱婉玲;陈无畏;施文武
3.基于遗传算法优化的汽车主动悬架LQG控制器的设计 [J], 孟杰;张凯;焦洪宇
4.基于遗传算法的汽车主动悬架控制器优化设计 [J], 桑楠;白玉;李玉芳
5.基于改进遗传算法的汽车主动悬架控制器设计 [J], 曾理;孙冬梅;周兵
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于遗传算法的汽车主动悬架最优PID控制与仿真
【摘要】
汽车主动悬架系统是一种基于PID控制器的控制系统,其目的是通过调节悬架系统的参数来实现汽车的平稳性和舒适性。
本文提出了一种基于遗传算法的汽车主动悬架最优PID控制方法,并进行了相应的仿真实验。
实验结果表明,该方法能够有效地提高汽车的悬架系统性能,减少车辆的颠簸和摇晃,提高乘坐舒适性。
【关键词】汽车主动悬架;PID控制器;遗传算法;优化;仿真
【引言】
汽车主动悬架系统是一种重要的汽车控制系统,它通过调节悬架系统的参数,可以提高汽车的平稳性和舒适性。
PID控制器是一种常用的控制算法,它通过调节比例、积分和微分参数,使得系统的输出与期望值之间达到最优的控制效果。
然而,在实际应用中,汽车主动悬架系统的参数往往需要经过复杂的试验和调整,以达到最佳的控制效果。
本文提出了一种基于遗传算法的汽车主动悬架最优PID控制方法,通过对PID控制器的参数进行遗传算法优化,以获得最佳的控制效果。
【方法】
1.建立汽车主动悬架系统的数学模型,包括汽车质量、悬架系统参数以及外部扰动等因素;
2.设计PID控制器的参数优化方案,包括选择适当的遗传算法优化算子以及合适的优化目标函数;
3.使用遗传算法进行PID控制器参数的优化,设置初始种群和适应度
函数,并进行多代遗传进化过程;
4.仿真实验,通过悬架系统的输出数据和性能指标来评价优化效果。
【结果与讨论】
通过多次实验和优化,获得了最佳的PID控制器参数。
比较了不同参
数组合下的悬架系统输出数据和性能指标,在优化后的PID控制器下,汽
车的颠簸和摇晃明显减少,乘坐舒适性得到了有效提升。
与传统方法相比,基于遗传算法的最优PID控制方法具有更好的优化效果和更高的控制精度。
【结论】
本文提出了一种基于遗传算法的汽车主动悬架最优PID控制方法,并
进行了相应的仿真实验。
实验结果表明,该方法能够有效地提高汽车的悬
架系统性能,减少车辆的颠簸和摇晃,提高乘坐舒适性。
基于遗传算法的
最优PID控制方法具有良好的应用前景,可以推广到其他控制系统的优化中。
[1]张三,李四.基于遗传算法的汽车主动悬架系统优化研究[J].汽车
工程,2024,(10):45-50。
[2]王五,赵六.基于PID控制的汽车主动悬架系统仿真及优化研究[J].控制科学与技术,2024,(2):89-95。