伺服系统的分类和特点
定值控制系统、伺服系统和程序控制系统各有什么特点?

定值控制系统、伺服系统和程序控制系统各有什么特点?1. 定值控制系统的特点定值控制系统是一种基本的自动控制系统,其特点如下:•固定设定值:定值控制系统的最大特点是运行期间设定值保持不变。
系统通过比较实际值与设定值的差异,采取相应的控制措施来调整输出信号,使实际值尽量接近设定值。
•简单可靠:由于设定值固定不变,所以定值控制系统的设计相对简单,运行效果相对可靠。
这种系统一般适用于一些单纯性较高,要求不太高的控制任务。
•实时性较弱:定值控制系统的实时性较弱,无法对控制过程中的扰动和变化做出及时的响应。
只有当实际值与设定值差异达到一定程度时,系统才会进行调整。
•主要应用于稳态过程:定值控制系统主要适用于稳态过程,对于动态过程的控制效果较差。
2. 伺服系统的特点伺服系统是一种具有闭环控制的自动控制系统,其特点如下:•跟踪精度高:伺服系统能够根据给定的输入信号,实现较高的跟踪精度,使得输出信号尽可能接近给定值。
因此,伺服系统主要用于对精度要求较高的控制任务。
•动态响应快:伺服系统具有快速动态响应的特性,能够在较短的时间内迅速调整输出信号,以适应输入信号的变化。
•具有抗扰性:伺服系统能够通过反馈控制的方式,对外界干扰和系统参数的变化具有一定的抑制能力,保证输出信号的稳定性。
•需要精确的传感器和执行器:伺服系统的运行需要精确的传感器来实时获取反馈信息,以及高精度的执行器来实现输出信号的调整。
3. 程序控制系统的特点程序控制系统是一种依据预先制定的控制程序运行的自动控制系统,其特点如下:•可编程性:程序控制系统可以通过编程语言编写控制程序,灵活性较高。
根据控制需求的不同,可以灵活调整和修改控制程序,实现不同的控制策略。
•适用于复杂任务:程序控制系统适用于对控制任务要求较高,过程复杂度较高的场景。
通过编写复杂的控制程序,可以实现对多个参数的精确控制。
•实时性较强:程序控制系统可以根据预先制定的控制程序,实时响应输入变量的变化,并在短时间内做出相应的控制决策。
数控机床的种类及其特点
金属切削机床:对金属材料的坯料或工件,用切削、特种加工等方法进行加工,使之获得要求的几何形状、尺寸精度和表面质量的机器。
1952年,试制成功世界上第一台数控机床试验性样机。
它是由大型立式仿型铣床改装而成的三坐标数控铣床,其数控装置采用电子管元件,体积庞大,可作直线插补。
1957年投入使用。
1959年,美国克耐·杜列克公司(Keaney & Trecker)首次成功开发了加工中心(Machining Center-MC)。
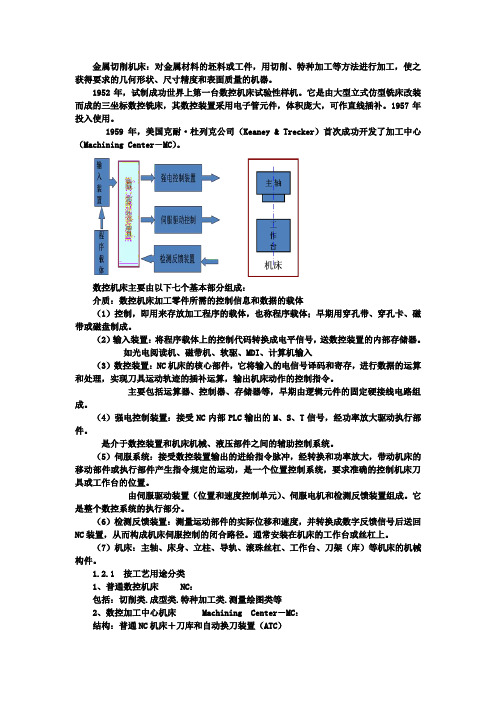
数控机床主要由以下七个基本部分组成:介质:数控机床加工零件所需的控制信息和数据的载体(1)控制,即用来存放加工程序的载体,也称程序载体;早期用穿孔带、穿孔卡、磁带或磁盘制成。
(2)输入装置:将程序载体上的控制代码转换成电平信号,送数控装置的内部存储器。
如光电阅读机、磁带机、软驱、MDI、计算机输入(3)数控装置:NC机床的核心部件,它将输入的电信号译码和寄存,进行数据的运算和处理,实现刀具运动轨迹的插补运算,输出机床动作的控制指令。
主要包括运算器、控制器、存储器等,早期由逻辑元件的固定硬接线电路组成。
(4)强电控制装置:接受NC内部PLC输出的M、S、T信号,经功率放大驱动执行部件。
是介于数控装置和机床机械、液压部件之间的辅助控制系统。
(5)伺服系统:接受数控装置输出的进给指令脉冲,经转换和功率放大,带动机床的移动部件或执行部件产生指令规定的运动,是一个位置控制系统,要求准确的控制机床刀具或工作台的位置。
由伺服驱动装置(位置和速度控制单元)、伺服电机和检测反馈装置组成。
它是整个数控系统的执行部分。
(6)检测反馈装置:测量运动部件的实际位移和速度,并转换成数字反馈信号后送回NC装置,从而构成机床伺服控制的闭合路径。
通常安装在机床的工作台或丝杠上。
(7)机床:主轴、床身、立柱、导轨、滚珠丝杠、工作台、刀架(库)等机床的机械构件。
1.2.1 按工艺用途分类1、普通数控机床 NC:包括:切削类.成型类.特种加工类.测量绘图类等2、数控加工中心机床 Machining Center-MC:结构:普通NC机床+刀库和自动换刀装置(ATC)特点:一次装夹后能完成多个工序,又称多工序数控机床3、多坐标数控机床:结构特点:可以进行多坐标轴的联动控制,常用4~6轴,多则可达24轴4、计算机群控: Direct Numerical Control -DNC即直接数控1.2.2 按运动方式分类1.点位控制数控机床点位控制NC机床能控制工件相对于刀具运动,从一个位置精确地移动到另一个位置,在移动过程中不进行任何切削加工。
伺服系统介绍 ppt
· 伺服系统构成
控制器
正弦波PWM
编码器数据
伺服放大器
伺服电机
· 脉冲串定位系统框图
定位模块
FX定位单元 其它控制器
脉冲串
-脉冲频率控制速度 -脉冲累积数控制位移
编码器反馈
三菱伺服系统的选型
何谓AC 伺服系统
以物体的位置,方位,姿势等为控制量,组成能跟踪目标的任意变化的控制系统。 伺服机构在由指令部输入目标值(位置,速度等)时,就能检测当前值(位置,速 度等),并与目标值相比较,经常进行着使其差值变小的控制。
传统解决方案
SSCNET 解决方案
Q173CPU 32 轴/ 模块
QD75M 4 轴/ 模块
· MR-J2S的特点
采用高性能CPU,速度响应达到550Hz以上 采用高分辨率编码器131072p/rev(17位)
接收一个脉冲,电机旋转0.0027° 高级实时自动调整抑制控制器 振动抑制滤波器,自适应振动 增益搜索功能,自动找出最佳增益值 电机的自动ID识别
多轴显示器
MR-Configurator和MT-Developer的兼容性提高
伺服参数设定画面的综合
MT-Developer系统设定
MR-Configurator参数设定画面
・统一管理设定数据 ・全部的设定数据在motion侧进行管理
图表功能的强化
3通道示波器功能 可以同时对电机速度、转矩、母线电压等进行测定
31开放通讯协议用户可自行开发应用程序读出指令状态显示参数外部输入输出信号外部输入输出信号主站发送指令从站返回数据的半双工通讯方式当前报警和历史报警写入指令状态显示数据清除参数写入当前报警复位和历史报警清除操作模式的选择外部信号的使能测试操作模式相关数据伺服设置软件mrconfigurator轻松设定伺服参数轻松设定伺服参数同时还有诊断功能同时mrj2ssetup151e用于mrj2smresetup154e用于mre基本功能监控电机运行情况同时还可以采集数据构成曲线图设定运行速度和加减速时间做试运行设定运行位移做定位运行机械分析功能高级功能增益共振点30秒内快速完成共振点的检测相位增益搜索功能反复进行加减速操作设定inp的范围满足定位精度为提高定位精度设定等待时间长于调整时间第一次起动与第二次起动间隔必须大于1秒第一次起动与第二次起动间隔必须大于1秒输入的定位指令脉冲必须大于100pulses设置参数块数值为000e使用微振动抑制功能关闭自动调整模式从机械分析器文件中读取机械分析数据自动识别电机id号电机力矩限制电机机械特性速度命令位置增益1位置增益1机器模拟功能位置增益2速度增益1速度增益2速度积分补偿读取写入电机速度滞留脉冲速度命令力矩力矩曲线图主要选用配件动态制动器适用于11kw或者以上的伺服放大器当断电或者保护回路动作时使电机急停
伺服驱动技术
伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式 表现,可概括为动态误差、稳态误差和静态误差三个方面组成。
稳定性 伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够 恢复到原来稳定状态的能力;或者当给系统一个新的输入指令后,系统 达到新的稳定运行状态的能力。
响应特性
响应特性指的是输出量跟随输入指令变化的反应速度,决定了系 统的工作效率。响应速度与许多因素有关,如计算机的运行速度、 运动系统的阻尼和质量等。
Ra CeC 2
T
由上式知,直流伺服电机的控制方式如下:
(1)调压调速(变电枢电压)
(2)调磁调速(变励磁电流)
(3)改变电枢回路电阻调速
转向取决于电磁转矩 T 的方向,而 T 的方向 取决于 Φ 和 Ia 的方向。
+ Ia
Ua
M
If + Uf
+ Ia
Ua
M
-
-磁
场
Uf
反
If +
向
-
-
-
If +
360° zN
=
360° 40×3
= 3°
②采用三相六拍时: θ=
360° zN
=
360° 40×6
= 1.5°
3.步进电动机驱动电源
(1)作用 : 发出一定功率的电脉冲信号,使定子励 磁绕组 顺序通电。
与一般交流和直流电动机所不同的是,步进电动机定子绕 组所加的电源形式为脉冲电压,而不是正弦电压或者恒定 直流电压。
U2
3
U1
V2
W2
V2
W2
V2
W2
W1
V1
W1
闭环伺服系统结构特点

闭环伺服系统结构特点
一、引言
闭环伺服系统是一种常见的控制系统,其结构特点决定了其在工业自动化领域的广泛应用。
本文将从以下几个方面对闭环伺服系统的结构特点进行详细介绍。
二、闭环伺服系统的基本组成
1. 传感器:用于检测被控对象的状态或位置,将信号转换为电信号送入控制器;
2. 控制器:处理传感器反馈信号,并根据设定值和反馈信号计算出控制指令;
3. 执行机构:根据控制指令执行动作,如电机、液压缸等。
三、闭环伺服系统的工作原理
1. 传感器检测被控对象状态或位置,并将信号送入控制器;
2. 控制器处理传感器反馈信号,并根据设定值和反馈信号计算出控制指令;
3. 控制指令送入执行机构,执行机构按照指令执行动作;
4. 执行机构动作产生反馈信号,传回给控制器;
5. 控制器根据反馈信号调整控制指令,使得被控对象达到设定值。
四、闭环伺服系统的优点
1. 精度高:闭环伺服系统通过反馈控制,可以实现对被控对象的精确控制;
2. 稳定性好:闭环伺服系统可以根据反馈信号实时调整控制指令,保证被控对象的稳定性;
3. 响应速度快:闭环伺服系统可以根据反馈信号实时调整控制指令,响应速度快。
五、闭环伺服系统的应用领域
1. 机器人:闭环伺服系统可以用于机器人的运动控制;
2. 飞行器:闭环伺服系统可以用于飞行器的姿态控制;
3. 机床:闭环伺服系统可以用于机床的位置和速度控制。
六、结论
闭环伺服系统是一种精确、稳定、响应速度快的控制系统,其基本组成包括传感器、控制器和执行机构。
在机器人、飞行器、机床等领域得到了广泛应用。
电液伺服控制系统概述

电液伺服控制系统概述摘要:电液伺服控制是液压领域的重要分支。
多年来,许多工业部门和技术领域对高响应、高精度、高功率——重量比和大功率液压控制系统的需要不断扩大,促使液压控制技术迅速发展。
特别是控制理论在液压系统中的应用、计算及电子技术与液压技术的结合,使这门技术不论在原件和系统方面、理论与应用方面都日趋完善和成熟,并形成一门学科。
目前液压技术已经在许多部门得到广泛应用,诸如冶金、机械等工业部门及飞机、船舶部门等。
关键词:电液伺服控制液压执行机构伺服系统又称随机系统或跟踪系统,是一种自动控制系统。
在这种系统中,执行元件能以一定的精度自动地按照输入信号的变化规律动作。
液压伺服系统是以液压为动力的自动控制系统,由液压控制和执行机构所组成。
一、电液控制系统的发展历史液压控制技术的历史最早可以追溯到公元前240年,一位古埃及人发明的液压伺服机构——水钟。
而液压控制技术的快速发展则是在18世纪欧洲工业革命时期,在此期间,许多非常实用的发明涌现出来,多种液压机械装置特别是液压阀得到开发和利用,使液压技术的影响力大增。
18世纪出现了泵、水压机及水压缸等。
19世纪初液压技术取得了一些重大的进展,其中包括采用油作为工作流体及首次用电来驱动方向控制阀等。
第二次世界大战期间及战后,电液技术的发展加快。
出现了两级电液伺服阀、喷嘴挡板元件以及反馈装置等。
20世纪50~60年代则是电液元件和技术发展的高峰期,电液伺服阀控制技术在军事应用中大显身手,特别是在航空航天上的应用。
这些应用最初包括雷达驱动、制导平台驱动及导弹发射架控制等,后来又扩展到导弹的飞行控制、雷达天线的定位、飞机飞行控制系统的增强稳定性、雷达磁控管腔的动态调节以及飞行器的推力矢量控制等。
电液伺服驱动器也被用于空间运载火箭的导航和控制。
电液控制技术在非军事工业上的应用也越来越多,最主要的是机床工业。
在早些时候,数控机床的工作台定位伺服装置中多采用电液系统(通常是液压伺服马达)来代替人工操作,其次是工程机械。
2 液压伺服系统
,它可以绕扭轴在a、b、c
、d四个气隙中摆动。
力矩马达 1——放大器; 2——上导磁体; 3——永久磁铁; 4——衔铁; 5——下导磁体; 6——弹簧管; 7——永久磁铁
当线圈控制电流为零时,四个 气隙中均有永久磁铁所产生的固定 磁场的磁通,因此作用在衔铁上的 吸力相等,衔铁处于中位平衡状态 。通入控制电流后,所产生的控制 磁通与固定磁通叠加,在两个气隙 中(例如,气隙a和d)磁通增大, 在另两个气隙中(例如,气隙b和c )磁通减少,因此作用在衔铁上的 电磁力矩与扭轴的弹性变形力矩及 外负载力矩平衡时,衔铁在某一扭 转位置上处于平衡状态。
(5)执行元件(机构)。直接带动控制对象动作 的元件或机构。如上例中的液压缸。
(6)控制对象。如机器的工作台、刀架等。
液压伺服系统的分类(1/2)
3.液压伺服系统的分类
伺服系统可以从不同的角度加以分类。
(1)按输入的信号变化规律分类:有定值控制 系统、程序控制系统和伺服系统三类。
当系统输入信号为定值时,称为定值控制系统, 其基本任务是提高系统的抗干扰能力。当系统的输 入信号按预先给定的规律变化时,称为程序控制系 统。伺服系统也称为随动系统,其输入信号是时间 的未知函数,输出量能够准确、迅速地复现输入量 的变化规律
动圈式力马达的线性行程范 围大(±2~4mm),滞环小, 可动件质量小,工作频率较宽, 结构简单,但如采用湿式方案, 动圈受油的阻尼较大,影响频宽 ,适合作为气压比例元件。
二、力矩马达
由上下两块导磁体、左
右两块永久磁铁、带扭轴
a
b
(弹簧管)的衔铁及套在
c
d
衔铁上的两个控制线圈所
组成。衔铁悬挂在扭轴上
液压伺服系统的分类(2/2)
伺服工作原理
伺服工作原理
伺服工作原理是指通过控制电机的转动来实现精确位置控制的一种技术。
伺服系统由伺服电机、传感器、控制器和执行机构组成。
伺服电机是伺服系统的核心部件,通常采用直流电机或交流伺服电机。
它具有高速响应、高精度定位和扭矩稳定等特点。
传感器用于检测伺服电机的位置、速度和扭矩信息。
常用的传感器包括编码器、光电开关、霍尔元件等。
传感器将检测到的信号传输给控制器。
控制器是伺服系统的智能部分,根据传感器的反馈信号进行计算和控制,输出控制信号驱动伺服电机。
控制器通常采用数字信号处理器(DSP)或微处理器,具备高速运算和精确控制能力。
执行机构是指通过伺服电机驱动的机械部件,用于实现精确的位置调节。
例如,通过伺服电机驱动螺杆实现线性运动,或通过驱动轴实现旋转运动。
伺服工作原理的核心思想是,控制器根据传感器提供的反馈信息,不断调整输出信号,使伺服电机根据预定的位置要求进行精确控制。
当伺服电机的位置或速度发生偏差时,控制器通过对电机施加适当的控制信号进行修正,使其回到预定的位置。
总结起来,伺服工作原理就是通过控制器对伺服电机进行精确
控制,实现精确定位和定速运动。
这种工作原理使得伺服系统在很多应用领域中得到广泛应用,如机械加工、自动化生产线、机器人等。
伺服电机工作原理
伺服电机工作原理伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
1.伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
2.交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。
3.伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服系统在工业机器人的应用
伺服系统在工业机器人的应用工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。
而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。
一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。
伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。
伺服系统除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
广义的伺服系统是精确地跟踪或复现某个给定过程的控制系统,也可称作随动系统。
狭义伺服系统又称位置随动系统,其被控制量(输出量)是负载机械空间位置的线位移或角位移,当位置给定量(输入量)作任意变化时,系统的主要任务是使输出量快速而准确地复现给定量的变化。
伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
伺服系统组成原理框图1、比较环节比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行环节执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象被控对象指被控制的物件,例如一个机械手臂,或是一个机械工作平台。
5、检测环节检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服系统的分类和特点
一、引言
伺服系统,作为现代工业自动化的重要组成部分,其性能和特点在很大程度上决定了整个系统的性能和稳定性。
伺服系统能够根据输入的指令信号,自动、快速、准确地控制执行机构的位移、速度和加速度,实现对目标值的精确跟踪。
本文将对伺服系统的分类和特点进行详细的阐述,以便更好地理解和应用伺服系统。
二、伺服系统的分类
伺服系统可以根据工作原理和应用领域进行分类。
1.根据工作原理分类
根据工作原理,伺服系统可以分为电气伺服系统和液压伺服系统两大类。
其中,电气伺服系统又可以分为直流伺服系统和交流伺服系统。
(1)直流伺服系统:直流伺服电机由定子、转子、电刷和换向器等部分组成。
其工作原理是当电流通过励磁绕组和电枢绕组时,产生磁场,驱动转子旋转。
直流伺服电机具有调速范围广、低速性能好、响应速度快等优点,但同时也存在维护成本高、易磨损等缺点。
(2)交流伺服系统:交流伺服电机由定子、转子和编码器等部分组成。
其工作原理是通过控制电机的输入电压或电流,改变电机的旋转速度和方向。
交流伺服电机具有效率高、可靠性高、维护成本低等优点,但同时也存在调速范围较窄、低速性能较差等缺点。
2.根据应用领域分类
根据应用领域,伺服系统可以分为工业伺服系统和航空伺服系统两大类。
(1)工业伺服系统:工业伺服系统主要用于工业自动化生产线、数控机床、包装机械等领域。
其特点是要求精度高、稳定性好、可靠性高、响应速度快等。
常见的工业伺服系统有电机驱动控制系统、气压传动控制系统和液压传动控制系统等。
(2)航空伺服系统:航空伺服系统主要用于航空器自动驾驶系统、雷达天线控制系统等领域。
其特点是要求精度高、可靠性极高、响应速度快、抗干扰能力强等。
常见的航空伺服系统有舵机控制系统、燃油控制系统等。
三、伺服系统的特点
1.精度高:伺服系统的输出量能够精确地跟踪输入指令信号,从而实现高精度的位置控制和速度控制。
2.快速响应:伺服系统具有快速的动态响应特性,能够迅速跟踪输入信号的变化,保证系统的稳定性和动态性能。
3.稳定性好:由于伺服系统能够实时地调整输出量,使其与输入指令信号保持一致,因此其稳定性较好,不易受到外部干扰的影响。
4.可靠性高:由于伺服系统的结构简单、维护方便,且关键部件采用了高性能材料和优化设计,因此其可靠性较高,能够保证长期稳定运行。
5.适应性强:伺服系统的适应性强,能够在不同的工作环境和条件下进行工作,并且可以通过调整参数来适应不同的控制要求。
6.节能环保:伺服系统采用先进的节能技术,能够有效降低能源消耗,符合现代工业节能环保的要求。
7.可扩展性强:随着技术的不断发展,新的伺服控制技术不断涌现,使得伺服系统的功能越来越强大,且可扩展性强,能够满足不同领域的需求。
四、伺服系统的应用
伺服系统广泛应用于各个领域,如工业自动化、数控机床、包装机械、航空航天、医疗器械等。
在工业自动化生产线中,伺服系统用于控制机械臂的运动轨迹,实现自动化装配和搬运;在数控机床中,伺服系统用于控制刀具的进给速度和位置,提高加工精度和效率;在包装机械中,伺服系统用于控制包装材料的送料速度和位置,保证包装的质量和美观;在航空航天领域,伺服系统用于控制飞机和卫星的起飞、降落和姿态调整等。
五、伺服系统的未来发展
随着科技的不断进步和应用需求的多样化,伺服系统的未来发展将朝着以下几个方向展开:
1. 高精度、高响应:为了满足高端制造和精密测量的需求,伺服系统的精度和响应速度需要进一步提高。
2. 智能化:伺服系统将与人工智能、机器学习等技术相结合,实现智能化控制,提高系统的自适应能力和鲁棒性。
3. 模块化、紧凑化:为了满足不同领域的应用需求,伺服系统的模块化和紧凑化设计将成为未来的发展趋势。
4. 节能环保:随着环保意识的提高,伺服系统的节能环保性能将受到更多的关注。
5. 跨界融合:伺服系统将与机器人、物联网、5G通信等技术进行跨界融合,拓展应用领域和提升系统性能。
六、结论
伺服系统作为现代工业自动化的重要组成部分,其性能和特点对整个系统的性能和稳定性具有重要影响。
本文对伺服系统的分类和特点进行了详细的阐述,并介绍了其应用和发展趋势。
随着技术的不断进步和应用需求的多样化,伺服系统的未来发展将迎来更多的机遇和挑战。
通过不断研究和探索,我们将能够更好地理解和应用伺服系统,为工业自动化的发展做出更大的贡献。