基于预测函数控制算法的柔性结构振动抑制研究
一种柔性冗余度机器人振动抑制的复模态法_吴立成
¨X = J r¨θ+ Jr θ
( 7)
对冗余度机器人 , 在非奇异位形处 rank( Jr )
= m < nr ,¨θ有无穷多解 ,可写为
¨θ = J+r (¨X - Jr θ) + ZX
( 8)
式 中 , J+r = JrT ( J r JrT )- 1∈ Rnr× m 为 M o or e - Penro se广义
初始位形
4 仿真
为 验证复模态算法的有效性及抑振效果 , 针 对北京航空航天大学陆震教授领导研制的空间 4 杆柔性机器人 Buaa - Frr(末杆为柔性 ,其结构及 参数见文献 [ 3] ) 进行仿真。忽略机器人末杆姿态 误差 ,则 Buaa - Frr机器人有一个冗余自由度 , 建模时对末杆保留两阶模态 ,因此属于柔性自由 度大于冗余度的情况。仿真时选择参数为
逆 ; Z = ( I - J+r Jr )为 J r 的零空间映射矩阵 ; X∈ Rnr 为任
意的实向量 ; I 为 nr 维的单位方阵。
ZX项所形成的关节运动不引起末端位姿变
化 ,称为冗余度机器人的自运动 ,虽然 X可任意选
择 ,但 X不是自运动 , ZX对应的关节加速度才能产 生关节自运动 ,而 ZX并不是任意向量 ,所以自运
刚性自由度数和柔性自由度数。用假设模态法将
柔性变形离散化, 并进行模态截断, 再结合
Lag rang e方程 ,可得柔性机器人的动力学方程
¨θ
θ
M (θ, q)
¨q
+
D(θ,q )
+ q
θ K (θ,q) + Q =
If
( 1)
q
B
改进型负输入整形与最优控制结合的振动抑制方法
改进型负输入整形与最优控制结合的振动抑制方法赵志刚;游斌弟;赵阳【摘要】A new vibration reduction control strategy was presented.With it,the modified negative input shaping (MNIS)technique was combined with the optimal control method for active vibration control of flexible systems,such as, a flexible manipulator.An optimal state feedback controller was designed for the flexible manipulator maneuver and its vibration eliminating.To improve the performance of vibration control and reduce the system response time duration,a modified negative input shaper was used as a feed-forward controller,it was designed to utilize the vibration frequency and damping ratio of the whole closed loop system with a linear quadratic regulator (LQR).Combining the feed-forward control and feedback control and utilizing the respective advantages,the performance of the control system can be improved.Both analytical and numerical results were presented to demonstrate the effectiveness of the hybrid control strategy.It was shown that the proposed method can be used to reduce the time delay of the system's response and increase the response speed of the system.%针对诸如柔性机械臂这类柔性系统的主动振动控制问题,提出了基于改进型负输入整形和最优控制结合的振动抑制方法。
机器人关节振动抑制控制技术研究与应用

机器人关节振动抑制控制技术研究与应用随着机器人技术的不断发展,机器人的应用领域也越来越广泛。
然而,机器人在工业生产线上的应用中,常常受到振动的干扰,使得机器人的精度和效率受到影响。
因此,机器人关节振动抑制控制技术的研究与应用,成为了机器人控制领域一个重要的研究方向。
一、背景分析机器人关节振动抑制控制技术的出现,是由于机器人应用范围的扩大所带来的问题。
由于机器人在生产线上的应用领域越来越广泛,机器人需要具备更高的精度和效率。
同时,由于机器人的高速运动会产生振动,从而引入了误差,导致机器人精度下降。
因此,机器人关节振动抑制控制技术的研究与应用,成为了机器人控制领域一个重要的研究方向。
二、机器人关节振动抑制控制技术的研究机器人关节振动抑制控制技术的研究方向主要分为两类,一类是主动振动控制技术,另一类是被动振动控制技术。
(一)主动振动控制技术主动振动控制技术是指通过控制机器人臂或关节运动来减小振动幅度和频率的技术。
主动振动控制技术主要包括增益调整控制、自适应控制和预测控制等。
其中,增益调整控制是利用反馈控制理论建立振动抑制控制器,通过改变控制器的控制增益来控制机器人的振动。
其优点是简单明了,易于实现;缺点是需要对机器人模型进行准确建模,否则控制效果不佳。
自适应控制是通过自适应算法对机器人模型的特性进行识别,以此进行控制。
其优点是不需要精确的机器人模型,适用性较广;缺点是自适应过程较为复杂,处理时间较长。
预测控制是利用数学模型对机器人关节的未来运动进行预测,从而进行振动抑制控制。
其优点是可以在有限的时间内对振动进行有效的控制;缺点是建立预测模型的难度较大,建模精度对控制效果有很大影响。
(二)被动振动控制技术被动振动控制技术是指通过机械或材料的特性来吸收或隔离振动的技术。
被动振动控制技术主要包括弹性材料的应用、阻尼器的应用和主动质量调节等。
其中,弹性材料的应用是将某些材料对机器人关节的振动特性进行调整,从而实现振动控制。
旋转柔性梁系统振动频响特性分析及振动抑制
滞补偿并和低通滤波器的复合加速度 比例反馈 和 P F P 控制算法 ; 然后 , 建立 的系统 的实验平 台, 进行 了系统 振 动 的模态 分 析 , 有色 噪声 的振 动 特性 分 析 , 于 扫描 基 正弦信号的动态频响特性 分析 , 出了系统振动幅值 给 动态 特性 , 控制 器设 计 时参 数 的 选取 提 供 了参考 ; 为 最 后, 对挠性转动梁系统 , 利用所设计 的控制律进行了基 于加 速度 传感 器反 馈 的位 置设 定 点 的振 动控 制 和 转 动 过程 的振动控制 , 取得 了较好 的实验结果 , 振动被快速
基 金 项 目: 国家 自然 科 学 基 金 资助 ( 00 0 0 ; 家 自然 科 学 基 金 空 天 飞 6 44 2 ) 国
行器 重 大 研 究 计 划 资 助 ( 0 0 04) 广 东 省 自然 科 学 基 金 资 助 9551 ;
( 504 9 00 6 9 )
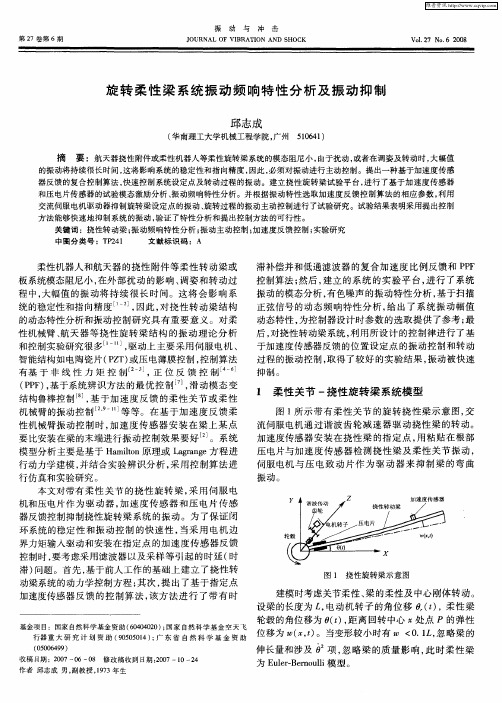
收稿 日 : 0 7 0 — 8 修改稿收到 日 : 0 —1 2 期 20 — 6 0 期 2 意 图
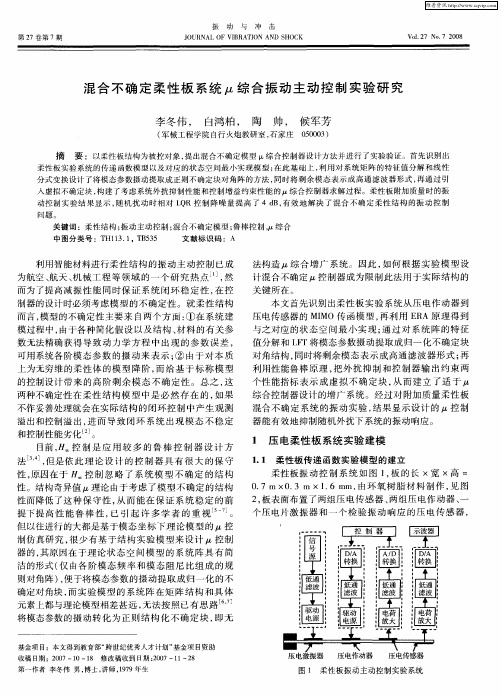
建模时考虑关节柔性 、 梁的柔性及 中心刚体转动 。 设梁 的长度 为 £ 电动机转子的角位移 () 柔性梁 , t, 轮毂的角位移为 0 t , () 距离 回转 中心 处点 P的弹性
位 移 为 ( £ 。当变形 较 小 时有 < . L 忽 略梁 的 ,) 0 1,
板 系统模 态 阻尼小 , 在外 部扰 动 的影 响 、 姿 和转 动 过 调
程中, 大幅值 的振 动将持续 很长时 问。这将会影 响系 统 的稳定 性 和指 向精 度 J 因此 , 挠 性 转 动 梁 结 构 , 对 的动态特 性分 析 和振 动控 制研 究 具 有 重要 意义 。对 柔 性机 械臂 、 天 器 等 挠 性 旋 转 梁 结 构 的 振 动 理 论 分 析 航 和控制实验研究很多¨ , 驱动上主要 采用伺服电机 、 智 能结 构如 电 陶瓷 片 ( Z ) 压 电薄 膜控 制 , PT 或 控制 算 法
考虑关节柔性的工业机器人末端残余振动抑制技术研究
2023-10-30
研究》的
目录
• 研究背景和意义 • 工业机器人末端振动抑制技术研
究现状 • 考虑关节柔性的工业机器人末端
残余振动抑制技术 • 基于实验的考虑关节柔性的工业
机器人末端残余振动抑制技术验 证
目录
• 结论与展望 • 参考文献 • 附录
在实际应用中,可以考虑将所提出的方法与其他 控制方法相结合,以实现更优的振动抑制效果。
06
参考文献
参考文献
01
02
03
04
05
董哲, 赵增辉, 王磊磊, 等. 基于阻抗控制的工 业机器人振动抑制研究. 机械工程学报, 2019, 55(18): 1-10.
王海涛, 陈蔚芳, 周向东. 基于最优控制的工业机 器人残余振动主动抑制 算法研究. 中国机械工 程, 2020, 31(13): 1785-1792.
研究不足与展望
虽然本文已经取得了一些成果,但是仍然存在一 些不足之处,例如建立的模型只考虑了关节柔性 ,没有考虑其他因素的影响,如负载变化、运动 速度等。
针对神经网络方法,可以考虑采用更先进的优化 算法和训练策略,以提高网络的训练效率和泛化 能力。
在未来的研究中,可以考虑将其他影响因素纳入 模型中,以更准确地描述工业机器人末端振动。
关节柔性是指机器人关节处因弹性形变而产生的位移、速度和加 速度,对机器人末端振动产生影响。
关节柔性对末端振动的影响
关节柔性会改变机器人末端轨迹,产生振动,影响机器人的稳定 性和精度。
影响因素分析
关节柔性受到多种因素影响,如机器人结构、材料、负载等。
考虑关节柔性的工业机器人末端残余振动抑制方法
基于H∞优化抗扰控制的柔性机械臂振动抑制
测器能够 准确地估 计频率 已知 的扰 动 , 因此使 用 G P I 观测器的抗扰控制对已知频率扰动引起的振动
基金项 目: 国家 自然科学基金 ( 5 1 5 0 5 3 8 0 、 5 1 4 7 5 3 7 3 、 5 1 3 7 5 3 9 0 ) 、 机械结构 力学及 控制 国家重点
在 建模 和设计 过 程 中考 虑 了扰 动对 系 统 的 影 响 , 如
观测器和状态反馈的变增益特性 , 提高了系统的抗 扰性 。然而 由于缺乏对此类 非线性反馈 的完备理
论, 对 自抗扰控制系统的参 数计算和调整需要对被 控系统特性的了解和一定 的经验 J 。G a o 【 o 提出了
采 用线性 扩 张状 态 观测 器 ( L E S O) 的 自抗 扰控 制 方
法, 通过传统的回路成型和极点配置等方法即可计 算观测器和控制器增益。该方法简洁 明了, 在高增 益的情况下可 以获得优秀的抗扰性能 , 但同时高增 益会使系统对噪声更加敏感 。M O i l e r 和L t i c k e l 提 出并开发了一种采用比例积分 ( P I : p r o p o r t i o n a l i n t e - g r 1) a 观测器的抗扰控制方法 , 通过观测器估计扰动 并将 估计 值反 馈 到控制 回路 中。随 后 Mt i l l e r 【 8 提 出
实验室开放课题 ( M C MS . 0 5 1 7 G 0 1 ) 与 l 1 1 引智计划 ( B 1 3 0 4 4 ) 资助
日 控制、 自适应控制和抗扰控制等 。其 中 , 抗扰控 制 通过 观测 系统所 受 外 界 扰 动 与系 统 状 态 变 量 , 并 将 观测值 反馈 到 系统 中形 成 闭环 回路 , 极 大 程 度地 降低 了扰动 对系 统 的影 响 , 非 常 适 合 用 于抑 制 由外 界扰动所引起 的振动。在 已知文献 中, 存在几种不 同的抗 扰控 制方 法 。韩 京清 提 出 了 由过 渡 过程 、 扩张状态观测器 ( E S O ) 、 非线性反馈 等部分所构成
混合不确定柔性板系统μ综合振动主动控制实验研究
而言 , 型的 不确定性 主 要来 自两 个方 面 : 在 系统建 模 ①
模 过程 中 , 由于各种 简化 假设 以及 结 构 、 料 的有 关参 材 数无法 精确 获 得 导致 动 力 学 方 程 中 出现 的参 数 误 差 ,
基金项 目:本文得到教育部“ 跨世 纪优 秀人才计划 ” 基金项 目资助 收稿 日期 :2o o 7—1 0—1 修改稿收到 日期 :0 7—1 — 8 8 20 1 2 第一作者 李冬伟 男 , 博士 , 讲师 ,99年 生 17
则对角 阵 )便 于将模 态参 数 的摄 动提 取成 归一 化 的 不 , 确 定对 角块 , 实验 模 型 的系 统 阵 在 矩 阵 结 构 和具 体 而 元素 上都 与理论 模型 相差 甚远 , 法按 照 已有思 路 。 无 。 ’ 将模态参 数 的摄 动 转 化 为 正 则 结构 化 不 确 定 块 , 即无
而为 了提 高 减振 性 能 同时 保 证 系 统 闭 环 稳 定 性 , 控 在 制 器 的设 计 时必须考 虑模 型 的不 确定 性 。 就柔 性 结构
法构 造 综合 增 广 系 统 。因此 , 何 根 据 实 验 模 型 设 如 计混 合 不确定 控制 器成 为 限制 此 法用 于 实 际结 构 的
性 而 降低 了这种 保 守 性 , 而能 在 保 证 系统 稳 定 的前 从 提下提 高 性 能 鲁 棒 性 , 引 起 许 多 学 者 的 重 视 。 已 但 以往进行 的大都是 基 于模 态 坐 标下 理 论 模 型 的 控 制 仿 真研 究 , 少 有基 于 结 构 实验 模 型 来 设 计 控制 很
组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告

组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告一、研究背景柔性机械臂具有结构灵活、可冗余、质量轻等优点,在机器人领域中具有广泛应用前景。
然而,在实际应用过程中,柔性机械臂所带来的振动问题给控制系统带来了很大的挑战。
因此,研究柔性机械臂的动力学特性和振动抑制性能,对其优化设计和精确控制具有重要意义。
二、研究目的本文旨在:1. 深入探究柔性机械臂的动力学特性,分析和建立柔性机械臂的动力学模型。
2. 研究柔性机械臂的振动抑制性能,探究影响柔性机械臂振动的因素及其对振动抑制的影响。
3. 组合动力学与振动抑制分析,提出有效的柔性机械臂振动抑制方法并进行实验验证。
三、研究内容本文将围绕柔性机械臂的动力学特性和振动抑制性能展开研究工作,具体包括以下内容:1. 对柔性机械臂的动力学特性进行深入分析,在建立动力学模型的基础上模拟分析柔性机械臂的运动学和动力学特性。
2. 探究柔性机械臂振动的原因,包括结构刚度、质量分布等对柔性机械臂振动的影响,并对振动抑制技术进行综述。
3. 基于系统鲁棒控制的方法,提出柔性机械臂的振动抑制控制方法。
设计集中式控制器并验证其有效性。
4. 通过实验验证柔性机械臂的动力学特性和振动抑制性能,并与其他已有的方法进行比较,以评估所提出的方法的有效性和实用性。
四、研究意义本文研究的柔性机械臂动力学特性和振动抑制性能对提升柔性机械臂的精度和控制能力具有重要意义,具体有以下几点:1. 深入研究和掌握柔性机械臂的动力学特性和振动抑制技术,有助于优化柔性机械臂设计,提高其控制精度。
2. 所提出的柔性机械臂振动抑制控制方法,为柔性机械臂的实际应用提供了一种新的控制途径,具有重要的理论和实用价值。
3. 相关研究成果可以为机器人领域中的其他柔性结构的动力学分析和振动抑制技术提供有益借鉴和参考。
五、研究方法和技术路线本研究主要采用理论分析和实验验证相结合的方法,具体技术路线如下:1. 对柔性机械臂的动力学特性和振动抑制技术进行综述和分析,总结相关理论和方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键 词 : 动 与波 ;预 测 函 数 控 制 ; 测 模 型 ;柔性 悬 臂 梁 ;振 动 控 制 振 预
中 图 分 类 号 : P 3 03 8 T 1; 2 文 献标 识 码 : A DO 编 码 : 03 6 /i n10 .3 52 1 20 1 I 1 . 9 s 0 61 5-Байду номын сангаас 1 0 9 js 0
s tm i d i e ba e o prditv -un ton o r ago ihm Th ago i yse s esgn d sd n e c i e f c i c ntol l rt e l rt hm r duc t e nln c m pu ai n n e es h o i e o t to a d
GOU n- e1 , LI D ape g Xi k 2 , - n
( . ol eo l tc l n fr t nE gn eig a z o nv ri f eh oo y 1 C l g f e r a adI oma o n ie r ,L h uU iesyo c n lg , e E ci n i n n t T
Ab ta t:T k n h ic e e sae s a e e u t n a r d ci n mo e,a f x b e c n i v rb a v b ai n c n r l sr c a i g t e d s r t t t— p c q a i s p e i t d l e i l a tl e e m i r t o to o o l e o
基 于预测 函数控 制算 法 的柔性 结 构振 动抑 制研 究
文 章编 号 : 0 6 1 5 (0 o —0 10 1 0 -3 52 1)20 0 .3 1
基 于 预 测 函数 控 制 算 法 的柔 性 结 构 振 动抑 制 研 究
缑 新 科 , 李 大 鹏
(1兰 州理 工 大 学 电气工程 与信 息工程 学 院 ,兰 州 70 5 ; . 30 0
振动 进 行控 制取 得 了满 意 的结 果 。为 了进一 步减 小 系 统 的在线 计算 量 , 高系 统 的实 时响应 能力 , 文 提 本
将 离散 化 的状 态空 间方 程 作为 预测 函数 控 制 的预 测 模 型 , 计 基 于预 测 函数 控 制算 法 的柔 性悬 臂 梁 振 设
i r v st e r a — mer s o s b l y o e s se T e smu a i n r s l h w h t h l o i m sa fe t e me h d mp o e h e l i e p n e a i t ft y t m h i lt e ut s o t a ea g r h i n e ci t o t i h o s t t v
动控 制系 统 。
构 的性 能 , 因此 对 柔 性 结 构振 动 控 制 是 十 分 有 必要 的 。 目前 提 出 的控制 方 法有 很 多种 。基 于现 代 控 制 理 论 的 有 L R, : 方 法 】 O Q H/ 等 H 。L R要 求 建 立 的 系统 数 学 模 型准 确 性 很 高 , 出现 偏 差 时 系 统就 会 当 出现 不稳 定 现 象 。 / 控 制 算 法 是 在 频 域 内设 计 实现 的 。智能 控制 方法 】 , 如模 糊 控制 、 神经 网络控
S u y o lx b e S r cu eVi r to u p e so s do t d n F e i l tu t r b a i n S p r s i n Ba e n P e it eF n to a n r l g r h r d ci u c i n l v Co to o i m Al t
La ho 7 0 50, Chi nz u 3 0 na;2 Ke bo ao y fGa uAd nc d Co to o n usra o e s s, . y La r t r o ns va e nr l rI d ti l f Pr c s e
L n h u 7 0 5 ,C ia a z o 3 0 0 hn )
f i r ton s pr s i orv b a i up e son
Ke r s: i rto n v p e it e f n to a o to p e it e mo e fe i l a t e e e m ; i r t n y wo d v b ai n a d wa e r d c i u ci n l n r l r d ci d l l x b e c n i v rb a v c v l vbai o
2 肃省 工业 过程 先进控 制 重 点 实验 室 ,兰州 7 0 5 . 甘 3 0 0)
摘 要 : 系 统 离 散 化 的 状 态 空 间 方 程 作 为 预 测 模 型 , 计 基 于预 测 函 数 控 制 算 法 的柔 性 悬 臂 梁 振 动 控 制 系 统 。 将 设 预 测 函 数 控 制 算 法 减 小 系 统 的 在 线 计 算 量 , 高 系 统 的 实 时 响 应 能 力 。使 用 Mal 对 振 动 控 制 系 统 进 行 仿 真 , 果表 提 tb a 结 明 该算 法 能 够 很 好地 抑 制 柔 性 悬 臂 梁 的 振 动 。
c t o on r 1
由于 柔性 结 构 自身 具有扰 度 高 , 阻尼 低 的特 性 ,
一
制 法 MP Mo e Pe i ieC nr1对 柔 性 梁 结 构 C( d l rdc v o t ) t o
旦受 到 外扰 时会 产 生 激 烈 且 持 续 的振 动 , 响 结 影