常见的凸封闭节曲线非圆齿轮副设计
齿轮传动-ppt课件
注意:不要把轴向力直接画在轴线或表示轮齿旋向 的斜线上。
最新课件
30
第第四四节节 齿齿轮轮强强度校度核 校核
齿轮的失效,通常都集中在轮齿部分。 轮齿的 主要失效形式有:轮齿折断、齿 面磨损、齿面点 蚀、齿面胶合、齿面塑 性变形等五种。为保证 齿轮传动所需工 作寿命,应进行强度计算与强 度校核。 一般只进行两类强度计算:齿面接触 疲劳 强度计算,齿根弯曲疲劳强度计算。
最新课件
14
二、斜齿圆柱齿轮受力分析
1、各力的大小
圆周力 径向力
F 2T1 d1
F F tan cos
轴向力
F
法向力
FF
F cotsan
T1 9.55
10
cos
6 P1 n1
式中:n 法面分度圆
压力角
t 端面分度圆压力角 分度圆螺旋角
最新课件
b 基圆螺旋角
15
2、各力的方向
圆周力 Ft:主动轮上的与转向相反,从动轮上的与转向相同;
常用于制造小齿轮和蜗杆 用于制造承受冲击和交变载荷的齿
轮和蜗杆 用于制造速度较高的耐磨
调质渗氮
齿轮
猝火调质
用于制造需氮化的齿轮,热 处 理 后不必磨齿 用于要求防锈、防腐的 齿轮,猝火 后 变形极 小,齿面光 泽
用于制造要求重鱼轻、受力较小的 齿轮
用于制造高抗磨或防磁的重要齿轮
及蜗轮 用于制造抗磨、防腐的次要
最新课件
12
1、各力的大小
2
F t
Td
1
1
F F tan
rt
F Ft 2T1
基于Pro/E椭圆齿轮的参数化建模
《 乜 机I 技术》2 0 0 8年第 2期
汁算机技术应用
基于 P o E椭 圆齿轮 的参数化建模 r/
罗敏峰
( 建 工 程 学 院机 电及 自动 化 工 程 系 ,福 建 福 州 3 0 1 ) 福 5 0 4
摘
要 :根据非圆齿轮节 曲线 的特殊性和齿轮一 轮齿分布 的对心性 ,提 Ⅲ在 P o E环 境下进行 椭圆齿轮的参数化建 J : r/
,
已有很 多 ,有 的开 发 出 内嵌于 三 维造 型 软件 中 的
齿 轮 功能模 块 。 由于非 齿 轮 ∞曲线 的特 殊 性和 齿 轮 上轮 齿分 布 的对 应 性 ,对 非 齿 轮 的三 维造 型 建模 就 显得 有 些难 度 ,对 其进 行 参 数化 建 模 的 研 究 也甚 少 。文献 [] ,虽 也提 山了对 非 齿轮 2中
模 ,不 仅可 以 让 . 计人 员 轻 松 地 进 行 齿 轮 的 更 新 设 计 ,人 人 地 缩 短 了 设计 周 期 。而 且 也可 用 于进 行 机 械 运 动 仿 真 、数 控 砹
办 工仿 真 或 有 限 元 分 析 。 ¨
关键词 :P o E 非 网齿轮 r/
椭 网齿轮
参数化建模
计算机技术应用
《 l技术》2 0 机 乜 0 8年第 2期
a = + a m与短轴 半径 b = + a m 齿根 曲线 长轴 a ah * ab h* ,
。= 4 E a
( )a 蕊 =』二 , 4√ 三
卜 a = 一 h + ) m与短轴 径 b = 一 h + ) m 径 f a (a c 木 卜 f b (a c 木 , 按 同样步骤 绘 出齿 顶 曲线及 齿根 曲线 。如 3中
机械原理第七章齿轮机构及其设计幻灯片

规格严格 功夫到家
16
2、相交轴之间传递运动 (2) 斜齿圆锥齿轮机构
轮齿倾斜于圆锥母线,制造复 杂。
规格严格 功夫到家
17
2、相交轴之间传递运动 (3) 曲齿圆锥齿轮机构
轮齿齿向线是曲线形,传动平稳, 适用于高速、重载传动,但制造 成本较高。
规格严格 功夫到家
18
3、交错轴之间传递运动
(1) 交错轴斜齿圆柱齿轮机构
弧齿锥齿轮传动 摆线齿锥齿轮传动 准渐开线齿锥齿轮传动
规格严格 功夫到家
5
一、齿轮机构的类型与功能
交错轴 齿轮传动
准双曲面齿轮传动
弧齿准双曲面齿轮传动 摆线齿准双曲面齿轮传动
交错轴斜齿轮传动
圆柱蜗 杆传动
阿基米德(轴向直廓)圆柱蜗杆传动(ZA蜗杆) 渐开线圆柱蜗杆传动(ZI蜗杆) 法向直廓圆柱蜗杆传动(ZN蜗杆) 圆弧圆柱蜗杆传动(ZC蜗杆) 圆环面包络圆柱蜗杆传动 锥面包络圆柱蜗杆传动(ZK蜗杆)
规格严格 功夫到家
11
1、平行轴之间传递运动 (6) 直齿齿轮齿条机构
齿数趋于无穷多的外齿轮演 变成齿条,它与外齿轮啮合 时,齿轮转动,齿条直线移 动。
规格严格 功夫到家
12
1、平行轴之间传递运动 (7) 斜齿齿轮齿条机构
斜齿轮斜齿条啮合传动。
规格严格 功夫到家
13
1、平行轴之间传递运动 (8) 非圆齿轮机构
轮齿分布在非圆柱体上,可实现一对齿轮的变传动比。需要 专用机床加工,加工成本较高,设计难度较大。
规格严格 功夫到家
14
1、平行轴之间传递运动
这是利用非圆齿轮变传 动比的工作原理,设计 的一种容积泵。现已获 得实用新型专利。
规格严格 功夫到家
对数螺旋线齿锥齿轮啮合原理研究

内蒙古科技大学硕士学位论文摘要*本文以节曲线为对数螺旋线的螺旋锥齿轮——对数螺旋线齿锥齿轮为主要研究对
象,首先从其节曲线分析入手,分析了其基本数学性质,并根据齿轮分析中对曲线的 应用要求,论证了对数螺旋线作为齿廓曲线和节曲线所具备的条件,如:光滑性、不 干涉性、连续性;其次为从理论上证明对数螺旋线应用于定传动比齿轮传动中只适合 作为螺旋锥齿轮节曲线,本文给出了对数螺旋线就平面啮合传动、圆柱齿轮空间啮合 传动的分析: 1) 在平面啮合中,利用啮合角函数原理建立了对数螺旋线的基曲线方程,阐明了 对数螺旋线的形成原理并指出:若对数螺旋线作为齿廓曲线,则只能应用于非圆齿轮 场合;通过比较齿形法和包络法的优缺点,取以包络法求解了对数线的共轭对数螺旋 曲线方程;基于此,以对数螺旋线为非圆齿轮节曲线,利用其共轭性得到了变传动比 规律。 2) 在圆柱齿轮空间啮合中,确定了圆柱螺旋线实现等螺旋角所要满足的条件,得 到了对数螺旋线与其无关的结论。 在上述研究的基础上,引出本文主要研究对象——对数螺旋线齿锥齿轮,提出本 文主要研究内容——对数螺旋线齿锥齿轮基本啮合原理的研究: 首先介绍了空间啮合理论分析中相关的基本概念,论述了空间锥齿轮传动原理, 介绍了空间双参数包络原理的思想。在此基础上阐明了对数螺旋线齿锥齿轮齿面的形 成原理,进而建立了齿面方程,并得到了啮合线及其方程;为求解对数螺旋线齿锥齿 轮齿面的啮合方程,建立了对数螺旋锥齿轮啮合的坐标体系,利用旋转矩阵确定了对 数螺旋线齿锥齿轮齿面啮合点的相对速度、单位法向量及节锥角,最终得到了啮合方 程;利用双参数曲面族的包络原理求解了该齿轮的第二共轭曲面方程;根据白川德曲 线理论,将曲面共轭的分析转化为节锥上共轭曲线的分析,论证了接触线及共轭曲面 分别为对数螺旋线及对数螺旋曲面,充分肯定了对数螺旋线齿锥齿轮曲面接触时等螺 旋角特性的研究意义,为对数螺旋线齿锥齿轮的啮合理论进一步完善和设计方法的研 究奠定了坚实基础。
机械原理_齿轮传动
齿轮机构及其设计 渐开线直齿圆柱齿轮的啮合传动 一对轮齿的啮合过程及连续传动条件
1 [ Z1(tg a1 tg ) Z 2 (tg a 2 tg )] 外啮合 2 1 [ Z1 (tg a1 tg ) Z 2 (tg a 2 tg )] 内啮合 2 2ha Z1 (tg a1 tg ) 齿轮齿条 2 sin 2 与m无关,随Z增大而增大,当Z 也增大到无
齿轮机构及其设计 渐开线标准齿轮的基本参数和几何尺寸 标准齿条的特点
1) 各同侧齿廓均为相互平行的直线,且齿廓上各 点压力角α相等,均等于齿形角 2) 不同线上的齿距相等,均为pi=p =πm,但 只有分度线上e=s
ha 、 h f 、h 、e 、s 、p 、c 等 仍用表10—2中有关公式计算
齿轮机构及其设计 渐开线直齿圆柱齿轮的啮合传动 渐开线直齿圆柱齿轮传动的 啮合过程 N1N2—理论上可能 的最长啮合线段, 特称为理论啮合线 N1、N2为啮合极限点 B1B2—实际啮合线
齿轮机构及其设计 渐开线直齿圆柱齿轮的啮合传动 一对轮齿的啮合过程及连续传动条件 齿轮齿条啮合传动
PB1不变, ha 2 ha m PB2 且 sin sin 2 h 1 a [ Z1 (tg a1 tg ) ] 2 sin cos 2ha Z1 (tg a1 tg ) 2 sin 2
m1 m2 m 正确啮合条件 1 2
齿轮机构及其设计 渐开线直齿圆柱齿轮的啮合传动 齿轮传动的中心距与啮合角
1 a (d 1 d 2 ) 2 m ( Z1 Z 2 ) 2
c
c c m
标准安装
1 d2 ) a (d 1 2
基于VC椭圆齿轮参数的设计系统的开发

动平 稳 可靠 、易 于实现 动平 衡及 可精 确地 按要 求
设 计传 动 比规律 , 且节 曲线 封 闭 的椭 圆齿 轮 可 而 以实现 连续 的单 向循 环 变速 运 动 , 其它 机 构 大 而 都只 能作往 复运 动 ,故在 一些 纺织机 械 、造纸 机 械 、卷烟 机和 往复式 输送机 等机械 中都有应 用 。
维普资讯
《 电 技术 》2 0 机 0 8年第 3期
计 算机 技 术应 用
基于 V C椭 圆齿轮 参 数 的设计 系 统 的开 发
罗敏峰 银光球
( 建工 程 学 院机 电及 自动 化 工 程 系 , 福建 福 州 3 0 1 ) 福 5 0 4 摘 要 : 椭 网齿 轮 传 动 属 于 变传 动 比的 齿 轮 传 动 , 其参 数 由于种 种 设 计 约 束 的 存在 ,它 们 并 不 是 独 立 的 , 设 计计 算
比传 动 ,这样 传统 的圆齿轮 就无 法满 足需 要 。因 而 ,非 齿轮 逐 步在 各种机 械 中得 到 了 日益广泛 的使 刚 。 非 圆齿轮 传 动并 非是 新颖 的传 动机构 ,早在 2 0世 纪 4 0年 代就 开始应用 , 由于 非圆齿轮 的设 但
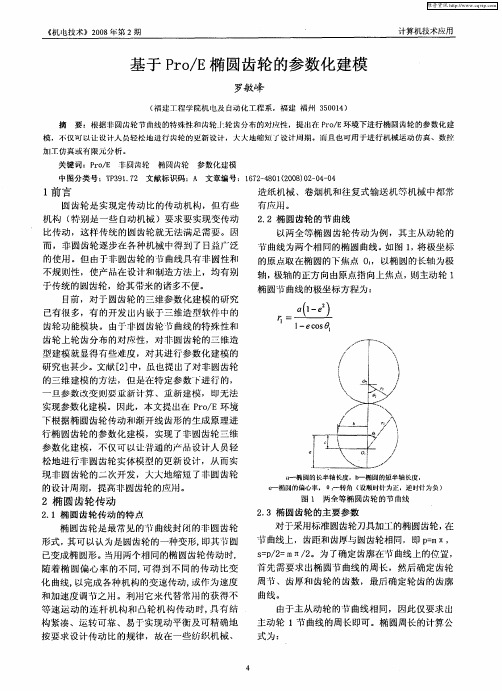
和从动 轮 2的节 曲线方程 式为 :
图 1椭 圆齿 轮 传 动 的节 曲线
足
。
=
a
—
( ) 1
l cst +—  ̄ eo
计计 算 、加 : 制造 有 一定 的难度 限制 了它 的发 展 [ 和应 用 。近 年来 ,随着 C D C M 术 的不断发展 , A/A 技
非 圆齿 轮在 设计 、制造 水平 发 生 了质 的飞跃 ,非
( 5 )
齿 轮 的分 别有 最大 角速度 ∞ 和 最 小角速度 6抽 0
非圆齿轮计算机辅助设计系统的研制与开发

根据非 圆齿轮的设计要求 ,在该 系统界面上输入合理的原始数 据, 通过设计程序完成设计及校核工作并显示设计结果 , 并且能 和“ 非圆齿轮图库 系统 ” 自动连接 , 完成绘图。 圆齿轮图库系统 非
ห้องสมุดไป่ตู้
维普资讯
一
7 2一
李建霞等 : 非圆齿轮计算机辅助设计 系统的研制与开发
别进行 了开发 , 系统总体结构设计 见图 1 。
图 1系统 总 体 结 构 设 计
Fi . Th oe s u t e d sg o t es se g 1 e wh l t cur e in f h y tm r
2系统 功能
非 圆齿轮计算机辅助设计 系统分成两个大的子系统 ,一是
S u y a d I lme t t n o e c mp t rad d d sg y t m fn n c rl e t d n mpe n a i f h o o t ue ie e i n s se o o - i e g ar c U in xaZ N n x T eFrt eo a t stt f i F re Xiyn 6 0 0C ia J — i HA G We - i h i rn ui I tueo r oc , n a g4 4 0 ,hn ) a n( sA cn i A
并 节 齿轮 的设计过程 比较 复杂 , 包括了节 曲线计算 、 它 凸性校验 、 轮 要参数和几何尺寸 , 由计算机 自动地对非圆齿轮的根切 、 曲
齿 位置及 等分性 、 齿坯计算 等很多 步骤 。V AVi a B s r 线 凸性等进行校验 , B ( s l ai f u co 然后 自动绘 制出非 圆齿轮 的零件工作 图。 A pi t n p l ai )是 引入 了对 象 的 程序 设 计 环 境 ,包 含 在 A t— c o uo C D 0 0中 , B A 20 V A通过 A tC D A t e u mao uo A ci X A t t n接 口将信 v o i 息传送给 A t A 而 A t A B uo D, u C DV A也允许 V A环境 与 A — C o B u tA o D同时 执行 并通 过 A t e u m t n 口提供 A tC D C ci X A t a o 接 v o i u A o 的程序 , V A中可 以快捷地 设计对话框 , 在 B 语法为易学 的 v— i
叶片差速泵偏心圆非圆齿轮驱动系统的研究(EI)

3.2泵壳配液孑L张角的确定
泵壳上的配液孔数目与叶轮的叶片数相同,并
且配液孔的理论张角∥与理论叶片角y相等。为了 避免相邻的吸液孑L和排液孔连通,实际开设配液孔
时,配液孔的实际张角应该小于其理论张角,即
’
po=p一△ 式中 屁——配液孔实际张角
万方数据
义幺叁o∞。。。。Q<
H=6 d=6.520 314 e=O.62l S96 12叶片
图8偏心圆一非圆齿轮传动比
3 叶轮基本参数的计算
3.1叶片角和叶片最大张开角的计算 如图9所示,叶片角),和叶片最大张开角目一
是叶轮的基本参数。这两个参数都与偏心圆一非圆 齿轮的节曲线形状有直接的关系。
图9叶轮的基本参数
rel赫e ob妇ed 占and
center dista_nce d have been
中图分类号:TH3
O前言
叶片差速泵是作者首先提出的一种新型容积泵, 它由驱动系统和同轴安装于泵壳内的两个均布有若 干叶片的叶轮组成的。在驱动系统的作用下,两个 叶轮作周期性地不等速转动(称其为“差速转动”), 叶轮的相邻叶片和泵壳构成的封闭腔的容积随着叶 轮的运动而周期性的变大和变小,从而吸入和排出 流体。叶片差速泵具有结构简单,体积小,重量轻, 效率高以及排量体积比大等优点,可广泛应用于需 要高输出压力,大排量的场合,该泵具有广泛的应 用前景。
式中 甩——非圆齿轮转一周时,偏心圆齿轮转过
的周数,即非圆齿轮与偏心圆齿轮的
颡氛 齿数比
2(
,艾驱:汐
f孑CjI_了亍三芋霉耘一·jd仍2主≥(2) 为了满足偏心圆一非圆齿轮传动的这种转角关
系,必须有如下方程式成立
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2007年6月农业机械学报第38卷第6期
常见的凸封闭节曲线非圆齿轮副设计刘永平吴序堂李鹤岐 【摘要]根据非圆齿轮的啮合原理,针对椭圆、偏心圆和巴斯噶蜗线等几种常见的凸封闭节曲线及其共扼的非圆齿轮,推导了节曲线的计算公式,并可利用计算机进行精确求解和某些特性参数的修正计算。对三类齿轮副的传动性能和设计制造方面的优缺点进行了对比分析,为其后续设计和制造提供依据。关键词:非圆齿轮椭圆偏心圆中图分类号:TH132・424巴斯噶蜗线节曲线
文献标识码:A
StudyonSomeCommonCloseConvexPitchCurvesofNollCirCularGearPair
Liuyongping1WuXutangZLIHeqil(1.LanzhouUniversit夕ofTechnolo舒2.Xi,anjiaotongUniversity)
AbstraCtAccordingtothemeshingtheoryofnoncircu1argears,thetheoreticequationsofpitchcurveasitanditsconjugatedgearsofsomecommoncloseconvexPitchcurves,suchcircleandPascalcurvewerepresented.TheadvantageofthismethodisthatcalculatedbythecomPuter,andtheamendmentresultofsomecharacteristicelliPse,eccentric
canbeaccuratelyParametersOfl
PalrSCalltfallSllllSS10ll
gained,andfordifferentdesign
capabilityanddesigncharacteristicrequlrement
ofnoncircularCall
besettled.gear thebe
geafPalrswereInaddition,
analyzed. Keywords
引言Noncirculargear,Ellipse,Eccentriccircle,Pascalcurve,Pitchcurve
非圆齿轮是用来传递两轴间非匀速运动的,和其他非匀速比传动机构(如凸轮、连杆等)相比,具有传动平稳、结构紧凑、运动精度高等优点[lj。非圆齿轮的传动过程,实质上是两节曲线的相切纯滚动过程。当采用齿条形刀具加工非圆齿轮时,必须保证节曲线是全凸的〔2一3〕。用于传递回转运动的非圆齿轮副,其节曲线必须是封闭曲线。常见的凸封闭节曲线非圆齿轮副主要有椭圆齿轮副、偏心圆齿轮及其共扼的非圆齿轮副、巴斯噶蜗线及其共扼的非圆齿轮副。对于椭圆齿轮,现有的文献研究已很全面;对于偏心圆齿轮,文献[1,4一5]中也有涉及;巴斯噶蜗线最早是由前苏联学者提出,把该曲线用于非圆齿轮及非匀速比传动,至今还未见有相关研究文献。采用计算机辅助设计方法,对这几种凸节曲线非圆齿轮的节曲线设计及其传动性能做些探讨,旨在为其后续设计和制造提供理论基础和优选依据。1椭圆齿轮及其共扼的非圆齿轮 椭圆齿轮是最常见的节曲线封闭的非圆齿轮,其回转中心在椭圆的一个焦点处。当它们的节曲线方程满足一定的条件时,则可保证节曲线是全凸的。有关椭圆齿轮及其共扼的非圆齿轮的节曲线方程计算,文献[1」中已有详细推导过程。1.1外啮合传动 当主动轮1的节曲线为椭圆时,与之外啮合的从动轮2的节曲线可以是椭圆、也可以是高阶椭圆(nZ)2),并且随着偏心率的不同,可得到不同的传动比变化曲线。由于椭圆齿轮的节曲线是封闭的,因
收稿日期:2006一02一15刘永平兰州理工大学机电工程学院博士生吴序堂西安交通大学机械工程学院教授李鹤岐兰州理工大学机电工程学院教授,730050兰州市博士生导师,71o049西安市博士生导师农业机械学报2007年
‘U
A琦
7一
N一药1霭半
此这种齿轮设计时应保证轮齿数为整数并在节曲线上均匀分布。一般来说,设一计时随意确定的节曲线参数,弧长计算结果很少能恰好满足此条件,因此必须通过改变节曲线的某些参数做适当的修正。对椭圆类齿轮,一般有2种修正方法川:一是保持椭圆的偏心率k不变,而修正长轴半径A;另一种方法是保持齿轮副的中心距a不变,而修正偏心率k。 当主动轮的齿数21=30、模数m=3,从动轮的阶数nZ=1时,分别取偏心率无,为0.3、0.5、0.7计算并绘制节曲线和传动比曲线112一仍,如图1所示。可以看出,随着偏心率的增大,椭圆齿轮副的传动比的变化范围明显增大。还可以用于偏心齿轮泵中。有关偏心圆齿轮及其共扼的非圆齿轮的节曲线方程计算,文献[4一6]中从不同侧面进行了论述。2.1外啮合传动 若主动轮1的节曲线是一偏心圆,相对于其回转中心来说,是一个阶数nl=1的非圆齿轮。当主动轮的齿数2,=30、模数m=3,从动轮的阶数n:=1时,分别取偏心圆的偏心率kl为0.3、0.5、0.7计算并绘制节曲线和传动比曲线八2一外,如图3所示。从图中可以看出,随着偏心率的增大,偏心圆齿轮及其共扼的非圆齿轮副的传动比的变化范围明显增大。
kl=0.7 ,一、一kl二住7/’\一kl=05
、厂-kl=。・3
一k.—kl
, I ,//
护多之
/‘、 },’,・“一’、、、}
=住5
=03
一‘一’一、、\
‘们
4,}
创当山尽
半
.‘军90180270360 转角甲1/(。) (a)
90180270胜 36(1转角沪./(。)
(a)
图3外啮合偏心圆传动副图1外啮合椭圆传动副Fig.3Externaleccentriccirclegearpairs
Fig.IExternalellipsegear
(a)外传动椭圆的112一仰曲线(b)走1=0.PalrS
5的椭圆齿轮副(a)外传动偏心圆的112一勿曲线(b)k、=。.5的偏心圆齿轮副
日・到盛尽掌
1.2内啮合传动 当从动轮为内齿轮时,两椭圆齿轮形成内啮合传动,此时主、从动轮的阶数是不相等的,若主动轮为椭圆,则从动轮为高阶椭圆(n2》2)。同理,根据节曲线的封闭性和轮齿在节曲线上的均布性,对内啮合传动的椭圆类齿轮,也有2种修正方法。 为便于对比起见,取外啮合椭圆齿轮传动副相同的参数,计算并绘制节曲线和传动比曲线八2一仍,如图2所示。和图1外啮合传动相比,内啮合传动更趋平稳。
2.2内啮合传动 当从动轮为内齿轮时,偏心圆齿轮及其共扼的非圆齿轮形成内啮合传动。当主动轮1为偏心圆齿轮时,若从动轮2的阶数为n:,同样取与外啮合偏心圆齿轮传动副相同的参数,其节曲线和传动比曲线112一外如图4所示。和图3相比,内啮合传动的偏心圆齿轮副其传动比变化范围要小得多。
一汤,,一、一汤!吮一二二二全屯一毛
=住7=仓5二0_3
一kl-一kl
井1--------------一竺90180270360
42八U
尹声三逐一kl卜、
270图4内啮合偏心圆传动副
少
・尸刁‘ ̄门 ̄。』,.乙UnU
nU
八廿
1朴呀于
一,,
N一当山得掌
090180 转角甲1/(。 (a)
Fig.4Internaleccentriccirclegearpairs
(a)内传动偏心圆的112一驹曲线(b)k,=。.3的偏心圆齿轮副
图2内啮合椭圆传动副Fig.Zlnternalellipsegearpais(a)内传动椭圆的晚一驹曲线(b)kl=。.3的椭圆齿轮副
2偏心圆齿轮及其共扼的非圆齿轮
偏心圆齿轮即圆齿轮的回转中心不在圆心上,而有一个偏心距。与其共扼的非圆齿轮的特征完全由偏心圆齿轮的大小和偏心率所决定。偏心圆齿轮副除了可以作传动副用,以传递非匀速比的运动外,
3巴斯噶蜗线齿轮及其共扼的非圆齿轮 巴斯噶蜗线的定义:在极坐标系中,半径为b/2,圆心为(b/2,0)的发生圆上任一点的径向方向上,与该点距离为1的点的轨迹称为巴斯噶蜗线,其数学方程为:=bcos梦+1,式中,b为发生圆的直径,1为定长。当1)Zb时,巴斯噶蜗线为凸封闭节曲线,如图5所示。第6期刘永平等:常见的凸封闭节曲线非圆齿轮副设计3.1外啮合传动 若非圆齿轮副的主动轮1的节曲线是巴斯噶蜗线,则该节曲线方程为 八=bcos外+1(1)设与其共扼的从动轮2的阶数为nZ,则齿轮2节曲线封闭的条件为增大3.2内啮合传动当内啮合传动的主动轮1的节曲线为巴斯噶蜗线且为外齿轮时,齿轮2节曲线封闭的条件为2兀n_r一=乙兀一1
刀ZJ丁;五是丁不d仍
“丁-、以七U。哟一「‘尸
图5Fig.5巴斯噶蜗线
Pascalcurve
齿轮副的中心距为
而猛而d叭一27t(2, (nZ一1)习(1一2n2)bZ+12n姜+1(nZ一1)2a=2n2一1
此时齿轮副的中心距为 (二2+1)丫(2,2+1)。2+22。;+,(。2+1)2 a=2n2+1
则从动轮2的节曲线方程为 rZ=a一(bcos叭+1)
(3)则从动轮2的节曲线方程为 r:=a+rl=a+(bcos仍+1)。一户,奥掣些共d。 Joa十L口cos叭一t)
f几bcos吸十1种今1二于五万二二丁下又Q哟 JO“—、理夕、U。甲1一厂‘少
内啮合齿轮副的传动比为 a+(bcos妈+1)bcos叭+1
(9)(10)(11)(12)
(13)、J
Z
、.产
4尸a了
‘
/.、
外啮合齿轮副的传动比为 a一(bcos叭+1)bcos叭+1(6)
主动轮的节曲线弧长为bZ+12+Zblcos叭d仍(7)
根据节曲线的封闭性和轮齿在节曲线上的均布性,其弧长还必须满足条件 L=兀mzl(8)因此设计时可通过改变节曲线的某些参数做适当的修正。对这类非圆齿轮来说,可保持2不变,而修正b;或保持b不变,而修正1,二者均可通过解非线性方程求得修正值。 为便于对比,取主动轮齿数2:=30、模数m=3,当从动轮的nZ=1时,分别取发生圆的直径b=10、15、20,计算并绘制节曲线和传动比曲线112一外,如图6所示。从图中可以看出,随着发生圆直径的增大,巴斯噶蜗线传动副的传动比的变化范围在逐渐
同理,在实际应用中可根据节曲线的封闭性和轮齿均布条件对1或b进行适当修正。 取外啮合巴斯噶蜗线齿轮相同的参数,其节曲线和传动比曲线112一外如图7所示。和图6相比,内啮合传动的巴斯噶蜗线齿轮副其传动比变化范围也要小得多。
___b=20 _。_b=15 —b二正0二三注全。_
:
『玉
俘半
90180270360 转角甲1/(。)
(a)
42
八U
图7Fig.7内啮合巴斯噶蜗线传动副
InternalPascalcurvegearpairs(a)内传动巴斯噶蜗线的112一叭曲线(b)b=10的巴斯噶蜗线副
-一b=20一。一b=152[___一少经星巡
4三类齿轮副的对比分析 根据上述计算分析,对三类齿轮副的传动特性进行对比。表1为三类外啮合传动非圆齿轮副的最大、最小传动比;表2为三类外啮合非圆齿轮副传动比112<1的转角范围。 从表1可以看出:前两类齿轮副,当主动轮的偏心率增大时,其传动比的变化范围明显增大,而且在基本参数相同的情况下,偏心圆齿轮副的传动比变化范围比椭圆齿轮副的更为显著;而巴斯噶蜗线齿轮副,当b在一定范围内增大时,其传动比的变化范围也逐渐增大,但变化的幅度相对较小。