失重秤原理解读
失重秤说明书

目录第一章前言1.1概述 (1)1.2 简介 (1)1.3 环境参数 (1)1.4 电源 (1)1.5 称重传感器 (1)1.6 主板数字输入端口 (1)1.7 主板数字输出端口 (2)1.8 通讯板 (2)第二章安装2.1 总述 (3)2.2 安装 (3)2.3 安全警示 (3)2.4 接线 (3)2.5 仪表的初始设置 (5)2.5.1 设定累计单位 (5)2.5.2 选择流量单位 (5)2.5.3 设置最大秤流量 (5)2.5.4 选择秤分度 (6)2.5.5 速度信号输入形式 (6)2.5.6 选择校准模式 (6)2.5.7 输入校准常数 (7)2.5.8 建立测试周期 (7)2.5.9 自动零点校准 (9)2.5.10 自动间隔校准 (10)第三章操作明细3.1.1 前面板 (13)3.1.2 LED状态指示 (13)3.1.3 键盘 (13)3.2 菜单显示 (14)3.3 运行显示 (15)3.3.1 主累计 (15)第四章菜单4.1 主菜单1 (17)4.1.1 读取当前零点及手动零点 (17)4.1.2 自动零点校准 (17)4.1.3 读取间隔及手动校准间隔 (17)4.1.4 自动调间隔 (18)4.1.5 实物校准间隔 (18)4.2 主菜单2 (19)4.2.1 显示 (19)4.2.2 选择累计单位 (20)4.2.3 选择流量单位 (20)4.2.4 设定显示流量缓冲时间 (20)4.2.5 秤数据 (20)4.2.6 设置最大秤流量 (21)4.2.7 选择秤分度 (21)4.2.8 设置零点死区 (21)4.2.9 远程累计输出分度 (21)4.2.10 定义速度信号输入方式 (22)4.2.11 校准数据 (22)4.3 主菜单3 (22)4.3.1 诊断 (22)4.4 主菜单4 (22)4.4.1 输入设定 (22)4.4.2 输出设定 (23)4.4.3 报警设定 (24)4.4.4 高流量设定点 (24)4.4.5 高流量报警延时 (25)4.4.6 低流量报警点 (25)4.4.7 低流量报警延时 (25)4.4.8 控制偏差设定点 (25)4.4.9 控制偏差报警延时 (26)4.5 主菜单5 (26)4.5.1 波特率设定 (27)4.5.2 地址设定 (27)控制菜单 (27)4.5.3 设定比例系数 (27)4.5.4 设定积分时间 (28)4.5.5 设定微分时间 (28)附1 参数设定记录 (31)附2 接线图 (30)第一章前言1.1 概述本操作手册详细说明了有关于失重给料机控制器的安装,操作,校准及维护方面的信息。
张力检测器
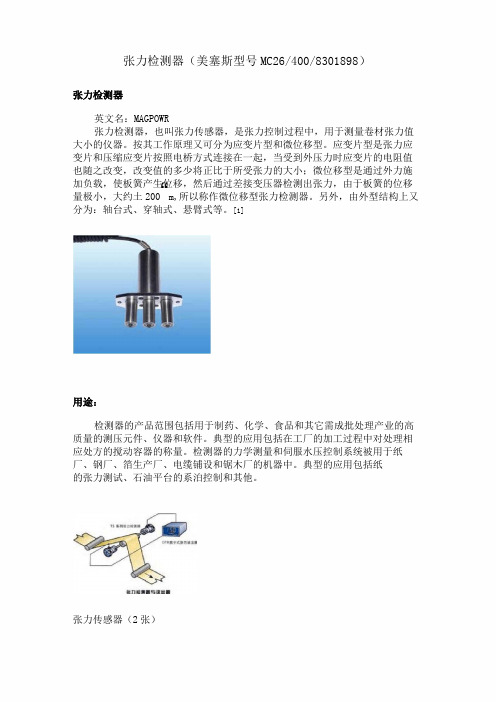
张力检测器(美塞斯型号MC26/400/8301898)张力检测器英文名:MAGPOWR张力检测器,也叫张力传感器,是张力控制过程中,用于测量卷材张力值大小的仪器。
按其工作原理又可分为应变片型和微位移型。
应变片型是张力应变片和压缩应变片按照电桥方式连接在一起,当受到外压力时应变片的电阻值也随之改变,改变值的多少将正比于所受张力的大小;微位移型是通过外力施加负载,使板簧产生位移,然后通过差接变压器检测出张力,由于板簧的位移量极小,大约土200“m,所以称作微位移型张力检测器。
另外,由外型结构上又分为:轴台式、穿轴式、悬臂式等。
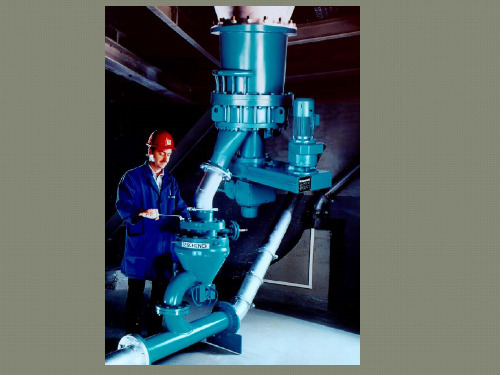
[1]用途:检测器的产品范围包括用于制药、化学、食品和其它需成批处理产业的高质量的测压元件、仪器和软件。
典型的应用包括在工厂的加工过程中对处理相应处方的搅动容器的称量。
检测器的力学测量和伺服水压控制系统被用于纸厂、钢厂、箔生产厂、电缆铺设和锯木厂的机器中。
典型的应用包括纸 的张力测试、石油平台的系泊控制和其他。
张力传感器(2张)概述:MAGPOWR@的张力控制产晶范围很广,任何时候都能为您提供精确的张力监测产晶.这些产晶能够通过简易的组合,搭建出满足您需要的最理想的张力监测解决方案。
模拟显示相数字显示均可放大器可用于传输O-1OVDC或4-20mADC信号至PLC或马达驱动器可选安装方式:DIN标准导轨(CE),撞墙式安装,嵌入面板式安装仪表及配件:AST3P;AST3IS;WST3;GATE3S;TAD3;WIN3;deltaCOM;型号系列:称重检测器KOM-1系列KOM-1-1OKNKOM-1-2OKNKOM-1-5OKNKOM-1-1OOKNKOM-1-2OOKN称重检测器KOSD系列KOSD-1000KNKOSD-2OOOKN称重检测器KOSD-40系列KOSD-40-10KNKOSD-40-20KNKOSD-40-50KNKOSD-4O-1OOKNKOSD-40-200KN锅炉张力计PST系列PST-20KNPST-40KNPST-80KNPST-200KN钢丝绳张力检测器RTT系列10〜36mm纸带张力测量模块FMU系列纸带张力测量模块HTK系列纸带张力检测器KIP-1系列KIP-1-10KNKIP-1-20KN双轴纸带张力检测器HTU系列HTU-2KlbHTU-6KlbHTU-lOKlbHTU-20KlbHTU-9KNHTU-27KNHTU-45KNHTU-89KN检测器AST31S系列DIN导轨检测器AST3P系列DIN导轨张力传感器系统的工作原理:配料系统采用24位高精度A/D转换器。
申克称原理及维护技术
申克煤粉秤喂料系统培训
MULTICOR K:检修与保养
一年或8000小时之后的检修与保养:
- 更换润滑油:
à只能使用Mobil SHC224 !
如使用其他品牌同一型号请事前与我联系!
à 加油时注意油位。 - 更换驱动皮带:
不能过高!.
à 只能使用原装同步皮带 à 安装和调整皮带的张紧必须按照标准步骤操作 à 发现异响过大或任何异常,应该在机械部件被皮带磨损前就要及时更换。
FR = Friction 摩擦力 } measuring result
申克煤粉秤喂料系统培训
煤粉秤计量原理 – 科里奥利力
P = F • s / • Ra2
= 角速度
F = 传感器受力 s = 传感器力臂 Ra = 测量轮半径
参数的获取来源:
Pulses per rotation Nominal force load cell / mV/V Lever arm load cell Radius measuring wheel
申克煤粉秤喂料系统培训 MULTICOR S 驱动轴
减速齿轮 测速传感器 驱动轴套
固定部分 轴承
传动轴 轴密封
F – 力矩
电机
传感器 coupling drive shaft bearings drive shaft seals
测量轮
申克煤粉秤喂料系统培训
MULTICOR K: 申克K系列测量轮的各种型号
申克煤粉秤喂料系统培训
MULTICOR K 测量轮计量原理– 科里奥利力
R = 测量轮半径 m ω = 转子角速度 m/s P = 流量 t/h M = 扭矩= FC • R
M P=
ω• R 2
失重和超重1

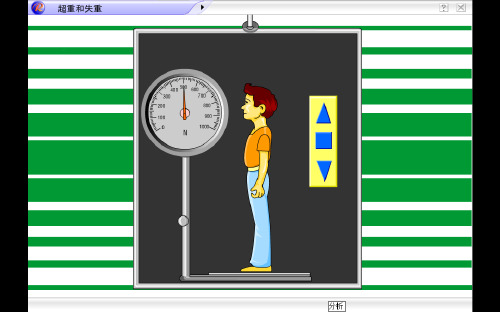
失重
物体有向下的加速度时,物体对支持物 的压力(或对悬挂物的拉力)小于物体 所受重力的情况称为失重现象。
N(或T)<G 向下加速
向下的加速度
向上减速
思考:
如果加速度a = g,则F’ = ?
原理分析
由牛顿第二定律得 F合 = G — FN = mg FN =G-mg=0 正 方 向 所以此时物体对台秤的压力等于0 a=g G
静止或匀 速升降 加速下降
减速下降 加速上升
3.80
3.80 3.80 3.80
3.80
3.40 4.ቤተ መጻሕፍቲ ባይዱ0 4.40
无
失重 超重 超重
减速上升
3.80
3.40
失重
实验资料分析
运动情况 匀速升/降
加速下降
减速下降 加速上升 减速上升
v 方向 a 方向 a=0 v/ v v a
v v v
a a a
超重/失重 无
失重
超重 超重 失重
结论:
a
物体有竖直向上的加速度时,会 发生超重现象;
a
物体有竖直向下的加速度时,会 发生失重现象。
思考:
1、有人说,物体加速上升时,重力变大了, 物体加速下降时,重力变小了,这种说法 对吗?
2、重力不变,那么发生变化的是什么力?
理论分析
设重物的质量为m,弹簧秤和 重物以加速度a一起加速上升。 对弹簧秤下重物受力分析如图:
V
正 方 向
a
超重
物体有向上的加速度时,物体对支持 物的压力(或对悬挂物的拉力)大于 物体所受重力的情况称为超重现象。
N(或T)>G
向上的加速度
超重与失重
根据牛顿第三定律,人对体重计的压力与体重计对人的支持
力 FN大小相等,方向相反。 FN
解析:选取人为研究对象。人体受到重力mg和体
重计对人的支持力FN,这两个力的共同作用使人
v
在下蹲的过程中,先后经历加速、减速和静止三
个阶段。 mg
新知讲解
(1)人加速向下运动 设竖直向下方向为坐标轴正方向,如图所示 根据牛顿第二定律,有
示数不相同,用手迅速向上提起重物时示数较大。
这一现象就与我们今天要学习的超重和失重现象有关。
新知讲解
一、重力的测量 1.重力:由于地球的吸引而使物体受到的力G=mg(实重)。 2.重力的称量 (1)视重:测量仪器显示的读数,是指物体对台秤的压力或对 弹簧秤的拉力。 (2)测量重力常用的两种方法
一种方法是,先测量物体做自由落体运动的加速度g,再用天平。
新知讲解
测量物体的质量,利用牛顿第二定律可得G=mg。 另一种方法是,利用力的平衡条件对重力进行测量。 根据二力平衡的原理:物体受到的重力G=台秤对物体的支持 力F;根据牛顿第三定律:物体对台秤的压力F'和台秤对物体的支 持力F是一对作用力和反作用力。因此物体的重力G=物体对台秤的 压力F'(数值上)这是测量重力最常用的方法。
新知讲解
二、超重和失重 1.超重:物体对支持物的压力(或对悬挂物的拉力)大于物体所受重力 的现象(视重>实重)。 2.失重:物体对支持物的压力(或对悬挂物的拉力)小于物体所受重力 的现象(视重<实重)。 思考讨论:人站在体重计上向下蹲的过程中,为什么体重计的示 数会变化呢?
新知讲解
分析:体重计的示数称为视重,反映了人对体重计的压力。
拓展提高
1、下列说法正确的是( B ) A.体操运动员双手握住单杠吊在空中不动时处于失重状态; B.蹦床运动员在空中上升和下落过程中都处于失重状态; C.举重运动员在举起杠铃后不动的那段时间内处于超重状态; D.游泳运动员仰卧在水面静止不动时处于失重状态。
第七节牛顿定律应用 超重与失重
7. 蹦床运动,人上下运动时,体验超重和失重。 ……
思考、一个人站在医用体重计的测盘上不动时测得重为G,当此人突然下蹲的过 程中,体重计的读数( )
B
A B C D
先大于G,后小于G 先小于G,后大于G 大于G 小于G
人下蹲过程分析:由静止开始 向下运动, 速度增加,具有向下的加速度 (失重); 思考:如果人下蹲后又突然站 蹲下后最终速度变为零,故还 起, 有一个向下 情况又会怎样? 减速的过程,加速度向上(超
v m
N
G N
a
甲
N<G 失重
v
m
a 乙 N>G 超重
G N G
N a
v
m
丙
N<G 失重
总结:物体具有竖 直向上的加速度,即 处于超重状态;物体 具有竖直向下的加速 度,即处于失重状态。 与运动的方向无关。
v
m
a 丁 N>G 超重
G
【规律总结】
1.产生超重的条件:当物体的加速度方向向 上时,即a↑。加速上升或减速下降——读 数大于重力(视重大于实重)
【体验与思考】 ——超重与失重 【实验一】把物体挂在弹簧秤下,用手带动弹簧秤和物体一起:
1.向上加速运动 ——拉力大于重力 2.向下加速运动 ——拉力小于重力 观察弹簧秤的示数如何变化?
【实验二】人站在体重计上,作如下运动: 1.快速蹲下 2.快速站起
——读数小于重力 ——读数大于重力
观察体重计的示数如何变化?
宇航员的
平躺姿势
太空中的失重环境
人造地球卫星、宇宙飞船、航 天飞机等航天器进入轨道后, 其中的人和物都将处于完全失 重状态 物体将飘在空中;液滴成绝对 的球形,宇航员站着睡觉和躺 着睡觉没有差别;食物要做成 块状或牙膏似的糊状,以免食 物的碎渣“漂浮”在空中,进 入宇航员的眼睛、鼻孔……
电子秤原理分析
电子秤原理分析电子秤是一种用于测量重量的设备,它采用了先进的电子技术和传感器技术,具有快速、准确和精确测量的特点。
本文将对电子秤的原理进行分析。
一、电子秤的工作原理电子秤的基本原理是利用电子传感器对被称物体的重力进行测量,并将测量结果转化为数字显示。
具体来说,电子秤的工作原理可以分为以下几个步骤:1. 传感器测量重力:电子秤通常使用称重传感器来测量重力。
称重传感器通常采用压阻传感器或应变片传感器,它们可以感知被称物体的重力作用在传感器上产生的微小形变或者电阻变化。
2. 电子部件转换信号:传感器检测到重力后,会产生相应的信号,这些信号需要经过一系列的电子部件进行放大、滤波、转换等处理,以便将信号转化为数字量。
3. 数字量显示:经过转换后的信号最终会被送到数字显示屏上,以便用户可以直观地看到被称物体的重量。
数字显示屏上一般会显示重量单位和测量结果。
二、电子秤的优点相比传统机械秤,电子秤具有以下优点:1. 精确度高:电子秤采用数字化的测量方法,可以提供更高的精确度。
传统机械秤容易受到环境因素和使用习惯的影响,而电子秤可以准确地显示出被称物体的真实重量。
2. 快速响应:电子秤的传感器能够快速地检测到被称物体的重力变化,并立即转化为数字显示。
用户只需等待短短几秒钟,就可以得到测量结果。
3. 易于使用:电子秤一般具有简洁明了的操作界面,用户只需将被称物体放在秤盘上,即可自动进行测量,无需繁琐的手动调整。
4. 可靠性高:电子秤采用先进的电子技术和耐用的传感器材料,具有较长的使用寿命,并且在适当的维护下能够保持较高的稳定性和准确性。
三、电子秤的应用领域电子秤已广泛应用于各个领域,包括但不限于以下几个方面:1. 商业领域:电子秤广泛应用于超市、商场、菜市场等地的商品计价和称重过程中。
它可以快速、准确地测量商品的重量,并自动计算价格,提高商家的计价效率和准确性。
2. 工业领域:在生产流程中,电子秤可以用于对原材料、成品等物品的称重,以确保产品的质量和准确度。
失重秤在自动化配料系统中的应用
进料 装 置用 于对 称 重 传 感 器 快 速 给 料 控 制 ,采 用 圆弧 门 的形 式 ,它 具 有 密 封 性 强 ,开 启 与 关 闭灵 活 ,
频率为 1  ̄4 Hz 5 0 ,这样保证调整范围宽 。
l 信号h 开关量输入 l { 回位 模拟量 输出 . 调节阀f 一 l 液位信号 卜 J 童 频器卜 电 机转速I
() 2 传感器量程选用适 当,秤斗最 大容 积按设计最
大流量运行时,保证能够稳定运行 3 n mi,计算公式为 :
收 稿 日期 :o 0 0 — 8 2 1— 42
作者简介 : 李 ̄
(92)工业 自动化与仪表工程师, 17- , 从事 自动
化配料 系统研究及 P C、 L 变频器和 自 动化仪表的应用和维护; 刘志民(9 4) 工业 自动 化 高级 工程 师, 事过程 自动控 制 1 6一 , 从
系统 、 自动 称 量 包装及 自动 化 配料 的 开发 与研 究 。
时 ,该系统可 自由扩展 。数字量输入输出模块采用 1 6 点 2VI 的 S 2 4  ̄ M32及 S 2 ,模拟量重量信号输入 M3 1 采用 8 1 位 的 S 1 ,温度信号输 入采用 8点 1 点 6 M3 1 6 位 的 S 3 ,模拟 量速度信号输 出采用 8点 1 M3 1 2位 的
关键词 失 重 秤 称 重传 感 器 可编 程 序 控 制 器 自动 配料 系统
0 引言
在现代工业生产 中,连续失重秤 是一种能够 对物 料的输送速率进行连续调节 和输送计量 的连续 给料设 备 ,也被称 为失 重式 给 料 秤。它 可 用来 连 续输 送 粉 料 、球料、片料 、颗粒料 和各种 短纤维物料 ,属 连续
失重 原理
失重原理
失重是指物体在自由下落时所产生的一种状态,即使在没有受到外力作用的情况下,物体仍然可以从高处向低处运动。
这种状态下,物体体重的感觉消失,所以称之为失重。
失重的原理可以通过牛顿第二定律来解释。
根据牛顿第二定律,物体的加速度与作用在物体上的合力成正比,而与物体的质量成反比。
当物体处于自由下落状态时,只有重力是作用在物体上的力。
根据牛顿第二定律,物体的重力与物体的质量成正比,所以物体的加速度与物体的质量无关。
因此,不论物体的质量大小,其自由下落的加速度都是相同的,即地球上的重力加速度。
失重的状态通常发生在太空中,当物体在轨道上绕地球运动时,会处于失重状态。
这是因为在轨道运行时,物体受到的离心力与重力相等,且方向相反,所以物体的净力为零,无法对物体产生加速度。
在失重状态下,物体的质量不会发生变化,但体重则会感觉消失。
这是因为体重是由地球引力作用于物体所造成的,而在失重状态下,物体已经摆脱了地球的引力,所以感觉不到体重。
除了太空中,其他情况下也可能会出现失重的状态。
例如,在过山车上或者快速上升的电梯中,人们可能会感到短暂的失重感。
这是因为在这些情况下,物体受到的加速度超过了地球上的重力加速度,导致产生了失重的状态。
但是这种失重状态通常是短暂的,当加速度发生变化或者回归到重力加速度时,失重感也会消失。
总之,失重是物体在自由下落时所产生的一种状态,无论物体的质量大小,其自由下落的加速度都是相同的。
失重状态可以在太空中或者某些特定情况下出现,而在失重状态下,物体的体重会感觉消失。
超重与失重课件-高一上学期物理人教版(2019)必修第一册
第六节 超重和失重
新课引入 生活中我们是如何测量重量的?
视重:测力计的示数反映了物体对支撑物的压力
或对悬挂物的拉力,称为视重。例如人站在体重计
上时,体重计的示数称为视重。(是可变的)
依据:牛顿第三定律
实重:物体实际的重力大小。(是不变的)
F支
F拉
结论:静止或匀速状态下,视重=实重。
2.条件: a g
vg
3.分析: F压(F拉) 0 F合 mg ma
电梯自由落体
完全失重的状态一切与重力有关的现象都会消失。如体重计测 不了体重、弹簧测力计测不了重力、天平测不了质量、摆钟不动 等
自由落体运动是完全失重的状态。 平时接近完全失重的状态称为微重力状态
航天器中的宇 航员
g
近地卫 星
电梯加速上升
失重
1.定义:我们把物体对支持物的压力(或对悬挂 物的拉力)小于物体所受重力的现象称为失重。
2.条件: a向下
3.分析:
由牛顿第二定律: mg F支 ma 由牛顿第三定律: F压 F支 mg
va 电梯加速下降
让一学生站立在体重计上,观察下列情况下体重计的示数变化: ①在体重计上静止不动; ②在体重计上迅速蹲下; ③在体重计上迅速站起。
g0
g
远离地球的卫星
火箭发射时向上处 于超重状态
航天器进入轨道后,航天器内的物将 处于完全失重状态。完全失重时,物 体将飘浮在空中,液滴呈球形
结论:超重和失重,重力不变,变化的是物体对支撑物 的压力或对悬挂物的拉力,即变化的是视重
练习
类型
加速上升 减速上升 加速下降 减速下降
v方向
向上 向上 向下 向下
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感器
称重仪 表
调节器
出料装 置
工作原理图
2018/12/10 4
失重秤工作原理
3、给料速率计算
失重秤的给料速率(排料流量)为单位时间内重量的损失值,理论上表示为: MT=dG/dt 式中 MT一给料速率 dG一重量的损失值 dt一测量周期 失重秤连续对整个给料系统包括计量斗、给料机构进行称重,相当于一台静秤; 同时通过变频调速来控制给料机构的卸料流量。 失重秤计量斗内每单位时间内物料重量的减少ΔdG/ Δt对应失重秤的给料流 量。失重秤控制器将dv/dt与预设的给料流量进行比较,并通过调节给料机 的速度来自动修正,因此可以保持精确的给料流量。 当计量斗内的物料重量低于预设值,失重秤控制模块将锁定给料机速度,保 持下料机构以容积方式给料,同时打开加料阀进行快速加料。当计量斗内物 料重量达到高位预设值,加料阀自动关闭。同时失重秤控制器自动将下料机 构切换到称重方式加料。
2018/12/10 6
失重秤工作原理
连续累计每个周期的排料重量,便可计算出时间t=0-- tn的累计重量。
失重秤连续对整个给料系统包括计量斗、给料机构进行称重,相当于一台静态秤;同时通过 变频调速来控制给料机构的卸料流量。 失重秤计量斗内每单位时间内物料重量的减少Δd/ Δt对应失重秤的给料流量。失重秤 控制器将dv/dt与预设的给料流量进行比较,并通过调节给料机的速度来自动修正,因此可 以保持精确的给料流量。 当计量斗内的物料重量低于预设值,失重秤控制模块将锁定给料机速度,保持下料机构以容 积方式给料,同时打开加料阀进行快速加料。当计量斗内物料重量达到高位预设值,加料阀 自动关闭。同时失重秤控制器自动将下料机构切换到称重方式加料。
2018/12/10
9
失重秤的结构组成
2、称重料斗
称重料斗是称重物料的承载体,材料选取要考虑抗蚀耐酸性。
2018/12/10
10
失重秤的结构组成
3、搅拌器
搅拌器主要用于对流动性差的物料进行辅助卸料,一般由简易的带螺旋叶片或钉齿 的破拱臂机驱动电机组成,通过破拱臂的旋转,使易出现起拱和鼠洞的物料能够顺畅 地落到出口部位。
失重秤
滕飞
2018/12/10 1
失重秤
一、工作原理 二、结构组成 三、仪表参数设置 四、精度影响因素
2018/12/10
2
失重秤工作原理
如图,失重秤是通过在工作时控制重量损失的原理实现计量的。首先对出料装置 和称重料斗进行称重,根据单位时间重量的损失,将实际给料速率与设定给料速率 进行比较,从而控制出料装置,使实际给料速率始终准确地符合设定值,在短时间 内加料过程中,出料装置借助重力,使工作期间存储的控制信号按容积式原理进行 工作。
2018/12/10
5
失重秤工作原理
4、累计重量计算
在一个完整的累计周期内,失重秤排料的累计重量Gq由两部分组成,即称量仪表计量和 存储的排料重量VA与称重料斗喂料期间未被计量的排料重量VD Gq=VA+ VD VA=( VH+£H )-( VL-£L) VD=MTL* tF 式中 VH —— 称量料斗内喂料重量上限值 VD —— 称量料斗内喂料重量下限值 £H —— 重量上限值称量误差 £L —— 重量下限值称量误差 MTL—— 喂料期间被锁定的给料速率 tF —— 喂料时间 锁定的给料速率MTL仍由每秒变动K个重量显示分度值来表示: MTL=K(d± β*d1)/(1±te ) 喂料时间取决于进料闸门的喂料流量MF, MF≈10 MT tF = VA /MF 1个完整的累计周期为: te= tF+ td 平均流量为: Mq =Gq/tn
1、工作原理
载荷谱示意图
2018/12/10 3
失重秤工作原理
2、称重过程
螺旋输送机启动,物料连续均匀往下输送物料,称重仓物料逐 步少,称重仓进入失重 计量阶段,在单位时间内减少的物料重量,通过计算得到物料的精准流量,称重料斗内物 料的重量通过称重传感器转换成电信号输送给称量仪表,称量仪表将计算出的物料重量与 预先设定的重量上、下限值进行比较和判别,通过PLC控制进料闸门,间断的向称重料斗 内喂料。同时,称量仪表将计算出的实际给料速率(排料流量)与预先设定的给料速率进 行比较,运用PID调节对出料装置进行控制,使实际给料速率准确地跟踪设定值。当进料 闸门开启向称重斗内喂料时,控制信号锁定给料速率,进行容积式排料,称量仪表显示实 际给料速率和排出物料的累计重量。
2018/12/10
15
失重秤的参数设置
2018/12/10
16
失重秤的参数设置
2018/12/10
17
2018/12/10
18
失重秤的精度影响因素
一、 机械方面
• 变频器是否正常工作。 • 搅拌电机与给料电机是否平稳,检查震动大小。 • 出料螺旋与输送螺旋之间必须软连接,称重系统与周边物体无碰触。平台要求不能有 明显震动。 • 出料螺旋的叶轮是否有缺损,如果有会影响出料的均匀性, • 加料时间不宜过长,加料开关一定要按下。
2018/12/10
11
失重秤的结构组成
4、出料装置
出料装置用于排出称重斗内的散状物料,采用螺旋给料机螺旋给料机比其它的封闭 式出料装置更为优越,它既能均匀地输送物料,也可以防止粉状物料的飞扬与喷射。
2018/12/10装置的支撑体,称重传感器安装在它的上面。
2018/12/10
13
失重秤的结构组成
6、称重传感器
称重传感器是失重秤的核心称量部件,多采用坚固的高分辨应变片传感器,它将物 料的重量信号转化成电信号进行输出。
2018/12/10
14
失重秤的结构组成
7、计量控制装置
计量控制装置由智能型称量仪表和自动控制系统组成,用于对给料速率、输送量等 进行控制和计量。 另外,失重秤的进、出料口一般应采用柔性的防尘和气密封软连接, 以保证储料仓和后接设备的连接不妨碍称重。失重秤的称重料斗和安装在其下的可调节 出料装置都座落在与机架固定的称重传感器上。
2018/12/10
7
失重秤的结构组成
失重秤一般由进料门、称重料斗、搅拌器、出料装置、机架、称重传感器及计量控 制装置等主要部分组成。
2018/12/10
8
失重秤的结构组成
1、进料闸门
对于自动补料进料闸门用于给称重斗喂料,多采用球阀、蝶阀、闸板阀等,一般主 要关注它的密闭性、开关灵活性,喂料快速和畅通等性能指标。