基于霍夫变换的快速道路检测和车辆辅助驾驶
基于加权霍夫投票的多视角车辆检测方法
基于加权霍夫投票的多视角车辆检测方法作者:李冬梅李涛向涛来源:《现代电子技术》2018年第15期摘要:针对复杂场景中车辆由于视角变化引起的检测精确度过低的问题,改进霍夫投票目标检测模型,提出一种在统一框架下通过不同权重组合发现目标最优视角并进行精确定位的方法。
首先,利用一种无监督方法实现多视角车辆的子视角划分;其次,利用子视角划分结果定义霍夫投票过程中各正例样本在不同视角下的投票权重;最后,利用子视角划分和投票权重,提出一种新的适用于多视角目标检测的加权霍夫投票模型。
在MITStreetScene Cars和PASCAL VOC2007 Cars兩个常用数据集上的实验结果表明,所提方法在不增加模型复杂度的前提下,有效提升了多视角目标检测精确度。
关键词:复杂场景;霍夫投票;最优视角;多视角目标检测;子类划分;局部线性嵌入(LLE)中图分类号: TN911.73⁃34; TP391.4 文献标识码: A 文章编号: 1004⁃373X(2018)15⁃0073⁃06Multi⁃view vehicle detection method based on weighted Hough votingLI Dongmei1, LI Tao1, XIANG Tao2(1. School of Information Engineering, Henan Radio & Television University, Zhengzhou 450008, China;2. School of Computer Science and Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China)Abstract: For the low detection accuracy of vehicles in complex scene caused by view variation, the target detection model based on Hough voting is improved to propose an accurate location method to find the object optimal view by means of different weights combination in the unified framework. An unsupervised method is used to realize the sub⁃view division for themulti⁃view vehicles. According to the sub⁃view division result, the voting weight of each positive example under different views is defined in the process of Hough voting. The sub⁃view division and voting weight are used to propose a weighted Hough voting model suitable for multi⁃view target detection. The experimental results are obtained by two commonly⁃used datasets of MITStreetScene Cars and PASCAL VOC2007 Cars. The experimental results demonstrate that the method can improve the multi⁃view target detection accuracy without increasing the model complexity.Keywords: complex scene; Hough voting; optimal view; multi⁃view object detection;sub⁃class division; local linear embedding在现实场景中,由于目标自身移动或者拍摄位置不同,导致最终目标在图像中以不同视角呈现,这将引起目标的外观特征出现很大差异,检测此类目标也变得极度困难,如图1所示。
基于HOG特征的车辆检测系统设计与实现

基于HOG特征的车辆检测系统设计与实现摘要:随着交通问题的日益严重,车辆检测技术在交通管理中起着重要的作用。
本文提出了一种基于HOG(Histogram of Oriented Gradients)特征的车辆检测系统设计与实现方法。
该方法通过对车辆图像进行特征提取,并利用支持向量机(SVM)进行分类,实现了对车辆的准确检测。
实验结果表明,该系统具有较高的检测准确率和较低的误报率,适用于各种复杂交通场景。
1. 引言随着车辆数量的快速增长,交通问题日益严峻。
传统的交通管理方法已经难以满足实际需求,因此车辆检测技术成为交通管理中的热点研究方向。
车辆检测系统能够实时准确地检测车辆,为交通管理提供重要的数据支持。
2. HOG特征提取HOG特征是一种用于图像识别的特征描述方法。
它通过计算图像中每个像素的梯度方向直方图,将图像转化为一系列特征向量。
在车辆检测中,我们选择将图像划分为小的单元格,并计算每个单元格内的梯度方向直方图。
通过将这些直方图串联起来,得到了描述整个图像的特征向量。
3. SVM分类器支持向量机是一种常用的分类方法,其能够通过将数据映射到高维空间,找到一个最优的超平面来进行分类。
在本文中,我们使用SVM分类器对提取的HOG特征进行训练和分类。
通过训练样本的特征和标签,SVM可以学习到一个分类模型,然后用于对新的车辆图像进行分类。
4. 系统设计与实现本文设计了一个基于HOG特征的车辆检测系统。
首先,我们收集了大量的车辆图像作为训练样本,并对这些图像进行了标注。
然后,我们使用HOG算法提取了这些图像的特征向量,并将其与标签一起输入SVM分类器进行训练。
最后,我们使用训练好的模型对新的车辆图像进行分类,并通过设定一个阈值来判断是否为车辆。
5. 实验结果与分析我们在不同的交通场景下进行了实验,并与其他常用的车辆检测方法进行了比较。
实验结果表明,本文提出的基于HOG特征的车辆检测系统具有较高的检测准确率和较低的误报率。
基于改进区域生长法和霍夫变换的车道分割法
21 0 1年 1 2月
计 算机应 用与软 件
C mp trAp l a in n o t r o u e p i t s a d S f c o wa e
Vo . 8 No 1 12 . 2 De .2 1 c 01
基 于 改进 区域 生长 法和 霍 夫 变 换 的车 道 分 割 法
Ke ywo ds r I elg n r ns o tto h r v d r go o n Ho h ta so La e s g n ai n ntlie tta p rain np o e e in g wig r ug r n f r m n e me t to
李梦亮 翁正新
( 上海交通大学 自动化系 上海 2 0 4 ) o 2 o
摘
要
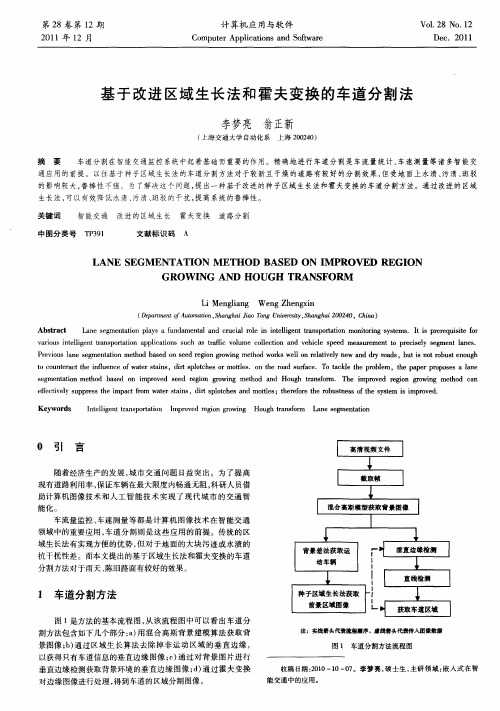
车道 分割在 智能交通监控 系统中起着基础 而重要 的作用。精确地进 行车道分 割是车流量统计 、 车速测 量等诸 多智 能交
通应用的前提。 以往 基于种子 区域 生长 法的车道分 割方法对 于较新且干燥 的道路有较好 的分割效果 , 受地 面上水渍 、 但 污渍、 驳 斑 的影响较大, 鲁棒性 不强。为 了解决这 个 问题, 出一种基于改进的种子 区域生长法和霍夫变换 的车道分 割方法。通过 改进 的区域 提 生长法 , 以有效 降低水渍 、 可 污渍、 斑驳的干扰 , 提高 系统 的鲁棒性。 关键词 中图分类号 智能交通 改进 的 区域 生长 霍夫 变换 T 31 P 9 文献标识码 A 道路分 割
AbБайду номын сангаасt a t sr c L n e me tt n p a s a f n a na n mc M oe i nel e t t n p rain mo i r g s se . I i p e e ust o a e s g na i ly u d me tla d c i rl n i tl g n r s o t t nt i y tms t s rr q ii fr o i a o on e
实时车道检测与跟踪算法研究

实时车道检测与跟踪算法研究一、前言随着智能交通技术的快速发展,汽车自动驾驶技术已经成为一个备受关注的话题。
实时车道检测与跟踪算法是车辆自动驾驶技术的重要基础,本文将围绕这一主题展开探讨。
二、实时车道检测算法实时车道检测算法是基于图像处理技术的一种算法,主要用于从摄像头获取的视频流中进行车道线的检测。
该算法的主要流程如下:1. 图像的预处理首先,需要对摄像头获取的图像进行预处理,常用的方法有图像灰度化、直方图均衡化、高斯模糊等。
2. 边缘检测边缘检测是实现车道线检测的重要步骤,常用的算法有Canny 算法、Sobel算法等。
3. 提取ROIROI(Region of Interest)是指我们在图像中要进行处理的区域。
在车道检测中,我们主要需要检测的是车道线,因此可以将ROI设置在道路中心的宽度为车道线宽度两倍的区域内。
4. 霍夫变换通过霍夫变换可以将图像中的直线转换成在极坐标空间中的点。
在车道检测中,可以将检测出的所有直线通过霍夫变换转换成极坐标系中的点,然后根据点的位置信息筛选出车道线。
5. 车道线筛选筛选车道线需要考虑多方面因素,例如车道线的长度、斜率等。
通过这些条件筛选可以得到最终的车道线。
三、实时车道跟踪算法实时车道跟踪算法是基于车辆自身状态的一种算法,主要用于在车辆行驶过程中实时跟踪车道线并进行路径规划和控制。
该算法的主要流程如下:1. 车辆状态估计车辆状态估计是指对车辆的位置、速度等信息进行估计。
常用的方法有滤波器、卡尔曼滤波等。
2. 车道线检测在车辆行驶过程中,需要实时检测车道线的位置信息。
可以利用上一帧的车道线信息作为初始值,在当前帧中进行检测和跟踪。
3. 车道线更新车道线的位置信息会不断变化,因此需要不断更新车道线信息,保证车辆能够始终沿着车道中心行驶。
4. 路径规划和控制通过对车辆位置信息和车道线信息的处理,可以得到路径规划和控制信号,控制车辆在车道中心行驶。
四、车道检测与跟踪算法的应用车道检测与跟踪算法在汽车自动驾驶技术中具有广泛的应用。
车道偏离预警系统 简介

一、系统简介根据(美国)国家公路交通安全管理局的定义,车辆偏离预警系统(LDWS-Lane Departing Warning System)是一种通过报警的方式辅助驾驶员避免或减少汽车因车道偏离而发生交通事故的系统。
绝大部分的车道偏离警告系统都将车辆在车道内的横向位置作为计算警告发生与否的一个基础。
这些检测车辆横向位置的系统基本上可以分为两类:基于道路基础构造的系统以及基于车辆的系统【1】。
(1)基于道路基础构造的车道偏离警告系统造来检测车辆横向位置,需要对现有道路进行改造。
最典型的道路改造方式就是使用埋在道路下的铁磁体标记(通常为磁铁或电线)。
车辆传感器检测这些铁磁信号,利用信号的强度计算车辆在车道中的横向位置。
这种方法对车辆横向位置的估计精度能达到几个厘米,但这种方法最大的缺陷是道路改造耗资巨大。
(2)基于车辆的车道偏离警告系统该类系统主要是利用机器视觉或红外传感器检测车道标识的位置,按照传感器的安装方式可分为俯视系统和前视系统。
1)基于车辆的俯视系统基于车辆的俯视系统其优势就是在结构化道路上效率高并简单易行,并有可能取得更高的定位精度。
其不利的因素是只能在结构化道路上使用(必须存在道路标识,且道路标识能被有效识别)。
2)基于车辆的前视系统基于车辆的前视系统优势在于可以利用更多的道路信息,在没有道路标识的道路上也可以使用。
其不利因素就是用来定位车辆横向位置的一些图像特征点可能被其他车辆或行人干扰。
目前商业化使用的产品都是基于视觉的系统,由道路和车辆状态感知、车道偏离评价算法和信号显示界面三个基本模块组成。
二、相关的预警系统国外——(1)AURORA系统、美国卡内梅隆大学机器人学院于1997年开发成功,是基于车辆的俯视系统中最具代表性的系统。
该系统的处理算法主要基于视觉的车道标识线识别与跟踪、车辆横向闻之估计、车道偏离警告三部分组成。
(2)AtuoVue系统、该系统由德国的DaimlerChrysler公司和美国的Iteris公司联合开发,2000年6月首次实际应用。
车道线检测常用方法

车道线检测常用方法车道线检测是计算机视觉中的重要应用,它通过图像处理的方法来识别道路上的车道线,为自动驾驶车辆、智能交通系统等提供必要的信息。
目前,车道线检测的方法包括基于图像处理的方法和基于深度学习的方法两种。
一、基于图像处理的方法1. Canny边缘检测算法Canny算法是较为常见的边缘检测算法,可以有效检测图像中的边界,常用于车道线检测中。
该算法通过对图像灰度值的变化进行分析,提取边缘信息。
步骤包括高斯模糊、求梯度、非极大值抑制和阈值处理等。
2. 霍夫变换霍夫变换是一种常用的直线检测算法,可以检测图像中的直线。
车道线通常采用直线来描述,因此可以采用霍夫变换来检测车道线。
步骤包括边缘检测、霍夫变换和直线提取等。
3. 基于颜色分割的方法车道线通常呈现一定的颜色特征,可以采用颜色分割来检测车道线。
常用的颜色分割方法包括RGB颜色空间、HSV颜色空间等。
步骤包括颜色空间转换、颜色阈值处理和形态学操作等。
二、基于深度学习的方法深度学习在车道线检测中也得到了应用,特别是卷积神经网络(CNN)模型。
该模型可以通过大量训练数据来学习车道线的特征信息,从而实现车道线检测。
常用的CNN模型包括Faster R-CNN、Yolo等。
总体来说,车道线检测方法有不同的优缺点和适用场景。
基于图像处理的方法简单易懂,但在车道线复杂或噪声较多时效果有限;基于深度学习的方法可以取得更好的效果,但需要大量训练数据和计算资源支持。
未来,随着计算机视觉和深度学习技术的不断发展,车道线检测方法也将不断提升。
Hough变换的车道线并行检测
Hough变换的车道线并行检测王赛;徐伯庆;苏栋骐【摘要】针对车道线识别鲁棒性的问题,提出了基于Hough变换的车道线检测方法.为解决Hough变换检测直线速度慢的问题,文中采用了并行加速处理技术,将待检测图片分解成左右两个感兴趣区域分别分配给两个CPU,再将两个CPU并行独立运行的检测结果进行汇总.实验数据表明,车道线检测速度提高了39.1%,车道线检测质量优于传统的串行检测,提高了Hough变换的车道线检测实现效率.【期刊名称】《电子科技》【年(卷),期】2015(028)012【总页数】4页(P96-99)【关键词】并行处理;Hough变换;车道线检测【作者】王赛;徐伯庆;苏栋骐【作者单位】上海理工大学光电信息与计算机工程学院,上海 200093;上海理工大学光电信息与计算机工程学院,上海 200093;上海理工大学光电信息与计算机工程学院,上海 200093【正文语种】中文【中图分类】TP391.41基于视觉的前方车道线检测技术是车辆智能驾驶辅助系统的主要研究内容。
近年来针对车道线视觉检测问题研究者已提出各种不同算法,如徐岩[1]等人和陈龙[2]等人均提出了不同的检测方法。
本文采用Hough变换检测车道线,然而利用Hough变换检测车道线速度比较慢,因此如何加快检测速度成为本文要解决的主要问题。
近年来有学者提出了将图像分割成感兴趣区域进行检测,如孙伟等[3]提出的分区处理,这样在某种程度上减小了数据处理量,从而缩短了检测时间,但还是无法达到实时性的要求。
本文提出了Hough变换检测直线的并行处理方法,将一幅图像分成左右两个感兴趣区域分配给两个CPU同时独立并行处理,以实现快速提高车道线检测的速度。
虽然也有学者提出将图像分割成左右两个感兴趣区域分别检测左右车道线,但还是基于一个CPU的串行处理,不能大幅减少检测速度。
Hough变换的原理是利用图像空间和Hough参数空间的点、线对偶性[4]。
一种改进快速Hough变换的车道线检测算法
一种改进快速Hough变换的车道线检测算法
亢伉
【期刊名称】《宝鸡文理学院学报(自然科学版)》
【年(卷),期】2014(34)2
【摘要】目的研究智能交通系统中车道线快速检测算法.方法首先将车道线图像灰度化,采用中值滤波去除图像噪声;然后用索贝尔算子将灰度图像二值化处理;再次,根据车道线图像的特点并且结合霍夫变换的需求,设置感兴趣区域;最后,在感兴趣区域内用霍夫变换提取车道线,用最小二乘法进行直线拟合,舍弃干扰虚假线,并对多段车道线图像进行检测.结果与结论相对于经典霍夫变换算法,基于改进快速霍夫变换的车道线检测算法运算时间更短,而且使算法的鲁棒性得到了很大提高.
【总页数】4页(P62-65)
【作者】亢伉
【作者单位】宝鸡文理学院计算机科学系,陕西宝鸡721016
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.一种快速Hough变换改进算法及其在图像边缘检测中的应用 [J], 李炜;黄心汶
2.基于改进Hough变换与双点去除R-最小二乘法的车道线检测优化算法 [J], 姜立标; 李静轩
3.一种多阈值Hough变换车道线检测算法 [J], 李伟林;梁卓凡;方遒
4.一种基于改进Hough变换的直线快速检测算法 [J], 段汝娇;赵伟;黄松岭;陈建业
5.一种基于改进Hough变换的车道线检测算法 [J], 卞建勇;徐建闽
因版权原因,仅展示原文概要,查看原文内容请购买。
houghpeaks函数
houghpeaks函数HoughPeaks是一种图像处理算法,用于在霍夫变换中找到明显的峰值。
霍夫变换是一种用于检测直线、圆等形状的图像处理技术,它将原始图像转换为参数空间中的一组点,使得在该空间中的峰值表示了原始图像中的形状。
HoughPeaks将霍夫变换输出中的峰值作为输入,并返回一组坐标,这些坐标与原始图像中找到的形状相关联。
HoughPeaks的核心思想是找到霍夫变换输出的极大值。
霍夫变换输出的每个点都表示了一条直线或圆的参数。
如果这条直线或圆在原始图像中出现了多次,那么它在霍夫变换输出中对应的点就会比其他点更亮。
我们可以通过寻找这些亮点来找到原始图像中的形状。
为了实现这一目标,HoughPeaks算法中使用了两个参数:thresh和NhoodSize。
Thresh参数是一个阈值,用于确定哪些点应该被认为是峰值。
只有霍夫变换输出中的点亮度大于这个阈值,才被认为是峰值。
NhoodSize参数是一个邻域大小,用于定义一个点周围的邻域。
如果一个点是峰值,并且它的邻域内有其他点的亮度也大于thresh,则这些点被认为是属于同一峰值。
HoughPeaks算法的具体实现如下:1. 给定霍夫变换输出矩阵H。
2. 对于每个点(x,y)在H中,如果它的亮度大于thresh,则将其标记为峰值。
3. 对于每个峰值,检查它的邻域大小是否为NhoodSize。
如果是,则将它们归为同一峰值。
4. 返回所有峰值的坐标。
该算法在计算机视觉领域有广泛的应用,包括图像分割、形状检测以及模式识别等方面。
在实际应用中,参数thresh和NhoodSize的值需要根据具体的问题进行调整,以获得最佳的效果。
除了HoughPeaks算法以外,还有一些其他的霍夫变换的应用,例如霍夫直线变换和霍夫圆变换。
在霍夫直线变换中,一条直线可以表示为(x,y)坐标系中的极坐标(r,θ)。
通过建立一张(r,θ)空间的表格,计算Hough变换并找出极值,可以检测到原始图像中的直线。
ADAS算法——快速准确的车道线检测方法(1)
ADAS算法——快速准确的车道线检测方法(1)内容摘要:为了提高车道线检测的准确性和实时性,提出了一种快速准确的车道线检测方法。
首先根据道路的纹理特征求出道路的消失点,再采用改进的Hough变换检测出车道线,结合车道线的一些特征以及摄像头的参数,在不影响测量结果的情况下缩小检测空间,快速准确地检测道路的车道线,并结合BRT车道(快速公交车道)的一些特征识别车辆所在车道是否为BRT车道,从而实现对BRT车道内前方车辆的监督。
将代码移植到DM6437开发平台随着经济以及道路的发展,我国的汽车保有量迅速上升,交通事故也成为人们普遍关注的焦点。
为了提高驾驶的安全性以及操作的简单性,车辆安全辅助驾驶系统成为当今国际智能交通系统研究的重要内容。
车道线检测作为车辆安全驾驶的一个重要研究方向,可以在车辆偏离航道时发出报警信息,有效地抑制事故的发生,具有重要的研究意义。
目前,国内外学者已经提出了很多车道线检测算法,主要分为两类:一类是基于图像特征的检测方法,即特征驱动法,是基于道路图像的一些特征(如车道线颜色、宽度以及边缘等特征)将图像的所有点标记为车道线点和非车道线点,这种机制要求道路的车道线颜色较为明显,边缘较为清晰,否则无法得到准确的检测结果;另一类方法是基于模型的检测方法,是根据提取的特征对预先定义好的车道线模型进行匹配,将车道线的提取转化为车道线模型中参数的计算问题。
模型的假设主要有直线模型和曲线模型两种,其优点是对噪音不敏感,能较好地处理图像中物体局部被遮挡和覆盖的情况。
本文结合道路的纹理特征并建立模型进行车道检测,既充分利用图像的信息,又在一定程度上保证了算法的鲁棒性。
本文首先对图像进行预处理,然后对图像进行Hough变换或者Gabor变换,得到车道线位置信息,判断出车辆是否在车道内行驶,如果不在则发出预警信号。
1 图像的预处理图像的预处理主要是对摄像头实时采集的图像进行前期处理,主要包括去除图像的各种噪声,并根据摄像机的位置调节算法中的一些参数提取图像的感兴趣区域(ROI),以及进行边缘检测等,目的是为了加强图像的有用信息,抑制干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于霍夫变换的快速道路检测和车辆辅助驾驶
Miguel ángel García-Garrido, Miguel ángel Sotelo, and Ernesto Martín-Gorostiza 西班牙马德里阿尔卡拉德赫纳雷斯市阿尔卡特大学电子系
{garrido, michael, ernesto }@depeca.uah.es 摘要:本文描述了一个实时的交通标志检测系统。该系统采用限制的圆周霍夫变
换来检测圆形标志以及直线性霍夫变换来检测三角形标志。为了说明检测系统的鲁棒性,这些结果是从一组在正常的和糟糕的天气条件下拍摄的图片上获得的。为了使这个系统工作在实时条件下,系统的平均处理时间是30ms每帧。
引言 在过去的年代人们对交通检测与识别的研究兴趣越来越高,这是由于提高道路交通安全的重要性所决定的。一些司机有时因为分心或者注意力不集中而错过交通标志。一般来说超速和分心是西班牙车祸的两个主要原因,所以为交通援助的道路检测这项工作的两个主要目标就是帮助司机使车速低于限额和避免分心。但是司机控制着驾驶系统,因此我们的系统将警告司机但不会制车辆。这些都是可以完成的,例如当超速时用声音警告或者使用声频信号(合成人类声音)提示检测的特定标志。交通标志检测和识别诞生于80年代后期,但直到实时系统的成功实现才使得该方法才被接受[1] [2] [3]。彩色分割是最常见的交通标志检测的方法,这种方法是基于这样的假设:即波长来自于一个标志的事实,例如限速标志的红色边缘不随照射在标志上的灯的强度和入射角的改变而改变,如果HSV或者HIS空间用于[4] [5]。摄像机的图像是没有,不过,完全根据变化中的不变量接收到的光色度的这些变化是由于色调,恶劣的天气条件等引起的。另一些作者用场景形状的信息来做标志检测。他们中一些人使用模板的边缘图像[1] [3]。该方法包括从边缘图像中获得距离变换,预先选定的模板对应 搜所的信号做进一步的匹配。这些模板是分层的所以比较次数将减少,但对于一个实时系统这个方法依然意味着相当高的计算成本。其他作品中,[10]中使用霍夫变换,否则有许多不同的版本[2] [7]。这些作品中对象的对称性属性的信息用于[8]。[2]中Barnes和Zelinsky表明采用这种方法系统可以足够快的工作在实时下,但只是圆形标志,特别是测试40-60公里每小时的限速标志,同时Loy和Barnes采用相似的技术来检测三角形、方形和八角形的标志但不是工作在实时条件下。
这个工作可以包括为使用在现场的对象的形状信息以减少可能的候选标志数目。根据西班牙驾驶法规现有的4种标志:禁止,义务,警告,告知。除了停止标志前两个都是圆形标志。不过这个也可以被认为是圆形检测的问题。因为使用霍夫变换检测周长,标志检测已经准备好了,但通过一些限制是它可以有效的检测这类标志。对于三角形的警告标志,线性霍夫变换被使用,三角形标志是由三条直线相互成60°切割而成。告知性标志不在这项工作的考虑中。
最后,必须指出的是,这项工作着重介绍了的系统搜所只在某个预先选定的有更高机率找到交通标志的图像区域中。
轮廓信息 该方法使用Canny算子做边缘检测【9】。在图一可以看出这种方法保留对使用形状信息来做交通标志检测非常重要的轮廓,因为通常是闭合的轮廓。 图一,在道路搜索范围内的实时图像序列和用于轮廓信息搜索的canny图像 众多的基于canny算子思想的实施边缘检测的系统被开发出来。Canny描述了一个产生强大的边缘检测方法。这种方法生成薄的轮廓,这也避免了不同对象的轮廓混合起来。通过几次在不同天气和光照条件下的试验,采取不同的阈值水平而结果都相似。这表明canny算子的阈值水平不是该应用的关键。
通过‘链码’使用canny算子得到的轮廓得到编纂。如果它们是封闭的或几乎封闭的轮廓,它们将会被采用。它们还必须满足一定的纵横比限制,表明有相似的高和宽。包括停止的圆形交通标志以及三角形交通标志满足这些高概率限制。霍夫变换只接受与上述限制过滤后的轮廓从而使计算时间缩短。
霍夫变换 传统的霍夫算法可以很容易的扩展到从图像中找到任何曲线,可以以解析函数f( x,p)=0 [12]的形式表达。这里x表示图像中点域p是参变向量。 线性霍夫变换被用于检测三角形标志。目标是检测三条相互交叉成60°的直线。必须指出的是,只要霍夫变换应用于整体图像中相交的直线数将很多,比实存在于检测图像中的三角形多。无论开始还是结束利用知道的直线性霍夫变换,因为用于变换的直线可以用极参数θ和ρ表示
1 为了克服这项工作中的这个障碍。将每个轮廓一个接一个的经行霍夫变换。这样只有这些三角形存在于实际检测的图像中。如图2所示,减少了计算时间 图2,采用线性霍夫变换,应用到整个图像(左),应用到每一个轮廓(右) 圆周霍夫变换被用于检测圆形标志和停止标志。一个在xy平面中心(x,ψ)和半径ρ的圆可以表示为:
2 其中参数空间p = (χ, ψ, ρ),必须量化。累加器矩阵‘a’代表量化参数空间,对于圆周检测累加器矩阵‘a’是一个将初始入口置0的三维矩阵。一个入口(χr, ψs, ρt)在
图像领域每递增一个特征点(xi,yi)在中心((χr, ψs)和半径为ρtd的圆如公式(3)所表达当数字化图像时为了保证量化补偿误差的精度ε。
3 对于圆形检测遵循直线检测的标准。霍夫变换被用于轮廓,以使那些轮廓对应的其他形状,但没有标志不影响后者的检测,如图3。
图3,整个图像使用圆周霍夫变换检测圆(左),检测轮廓(右)。 圆形标志的一个重要特点是它的中心实际上就是它的质心。利用这一特性使寻求中心的搜索范围靠近质心。考虑到这些将使检测时间很短,使该系统的工作在根据检测标志数量而定5~50帧每秒的处理速度。
结果 如图4所示该系统用一个安装在汽车挡风玻璃上的摄像头工作。通过几次试验将摄像头安装在挡风玻璃的不同方位,结果表明影响检测质量的决定因素不是位置而是方向的。最好的安排是将相机朝着汽车的同一个方向使标志与运动方向正交,从而使失真最小。如果一个圆形标志不是摄像机正交捕获,则它将是椭圆形标志从而不被检测出。但霍夫变换可以扩展到椭圆但它需要增加两个参数空间的关于这工作中的圆周变换的新参数。事实上该技术已经使用了,人们发现它的平均处理时间为2秒因此该系统不能实时操作。意识到圆周检测而不是椭圆是一种简化的方法是很重要的,但它不意味着糟糕的性能。相反,如果一个在捕获图像中的椭圆形恰好有很高概率对应于放置在另一个方向的别的路上的标志,例如在十字路口上。
图4,一个安装在汽车挡风玻璃上的摄像头 正如图5所描述,该系统已经在恶劣天气条件下有经验的测试了,并且没有影响成功检测率。对于每一个试验,成功的检测到标志的百分率超过99%,而平均处理时间是30帧每秒。 结论 一个实时交通标志检测算法已经被呈现。通过相似的技术该算法可以检测除了告知类标志外任何标志,这使该算法有很强的鲁棒性。此外,汽车上相机的位置不是关键,而且可以无问题足够快的工作于实时下。另一个特点是在恶劣的天气条件下如下雨天它表现出同样良好的性能。
至于今后的工作, 通过这样做将会避免连续检测相同的标志。另一个用来完成的方法是实施分类或识别阶段正如一个神经网络,这是实现这个目标的最常用的方法。
参考文献 1. Gavrila, D.M.; Franke, U.; Wohler, C.; Gorzig, S. “Real time vision for intelligent vehicles,” Instrumentation & Measurement Magazine, IEEE Volume 4, Issue 2, June 2001 Page(s): 22-27.
2. Barnes, N.; Zelinsky, A. “Real-time radial symmetry for speed sign detection,” Intelligent Vehicles Symposium, 2004 IEEE, 14-17 June 2004 Page(s):566 – 571.
3. Gavrila, D.M.; Philomin, V. “Real-time object detection for “smart” vehicles,” Computer Vision, 1999. The Proceedings of the Seventh IEEE International Conference on, Volume 1, 20-27 Sept. 1999 Page(s):87 - 93 vol.1. 4. Priese L., Rehrmann V., Schian R., Lakmann R.,“Traffic Sign Recognition Based on Color Image," Evaluation IEEE Intelligent Vehicles Symposium’93, Tokyo, 1993.
5. De Micheli, E.; Prevete, R.; Piccioli, G.; Campani, M., "Color cues for traffic scene analysis," Intelligent Vehicles '95 Symposium., Proceedings of the25-26 Sept. 1995 Page(s):466 – 471.
6. C. Y. Fang, C. S. Fuh, S. W. Chen, and P. S. Yen, "A road sign recognition system based on dynamic visual model" in Proc IEEE Conf. on Computer Vision and Pattern Recognition, vol. 1, 2003, pp. 750-755.
7. Loy, G.; Barnes, N.;"Fast shape-based road sign detection for a driver assistance system," Intelligent Robots and Systems, 2004. (IROS 2004). Proceedings. 2004 IEEE/RSJ International Conference on, Volume 1, 28 Sept.-2 Oct. 2004 Page(s):70 - 75 vol.1