实验 直流激励时霍尔传感器的位移特性实验
霍尔传感器综合测试实验

浙江工业大学之江学院实验报告课程名称:开放性试验系别:机电工程专业:测控仪器与仪表班级:测控1101班学号:201120070706学生姓名:何紫腾2015年1 月19日霍尔传感器综合测试实验一、实验目的1.了解霍尔式传感器原理与应用2.了解直流激励时霍尔式传感器的特性3.了解霍尔转速传感器的应用二、实验设备与元器件霍尔传感器实验模板、霍尔传感器、直流源、测微头、数显单元、相敏检波、移相、滤波模板、双线示波器、直流源+5V、转动源2-24V、转动源单元、数显单元的转速显示部分三、实验内容与步骤1.直流激励时线性霍尔传感器的位移特性实验(1)实验原理根据霍尔效应,霍尔电势UH=KHIB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量。
(2)实验步骤1)将霍尔传感器按图22-1安装。
霍尔传感器与实验模板的连接按图22-2进行。
1、3为电源±4V,2、4为输出。
2)开启电源,调节测微头使霍尔片在磁钢中间位置再调节R W1使数显表指示为零。
图22-1 霍尔传感器安装示意图图22-2 霍尔传感器位移――直流激励实验接线图3)微头向轴向方向推进,每转动0.5mm记下一个读数,直到读数近似不变,将读数填入表。
2. 霍尔测速实验(1)实验原理利用霍尔效应表达式:U H=K H IB,当被测圆盘上装上N只磁性体时,圆盘每转一周磁场就变化N次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
(2)实验步骤1)根据图22-4,将霍尔转速传感器装于传感器支架上,探头对准反射面内的磁钢。
图22-4 霍尔、光电、磁电转速传感顺安装示意图2)将5V直流源加于霍尔转速传感器的电源端(1号接线端)。
3)将霍尔转速传感器输出端(2号接线端)插入数显单元Fin端,3号接线端接地。
4)将转速调节中的+2V-24V转速电源接入三源板的转动电源插孔中。
5)将数显单元上的开关拨到转速档。
线性霍尔传感器位移特性实验

(a)工作原理
(b)实验电路原理
霍尔式位移传感器工作原理图
实验步骤:
• 1、调节测微头的微分筒(0.01mm/每小 格),使微分筒的0刻度线对准轴套的 10mm 刻度 • 线。按示意图安装、接线,将主机箱 上的电压表量程切换开关打到2±4V档。
线性霍尔传感器位移特性实验
• 基本原理:在半导体薄片两端通以控 基本原理: 制电流I、并在薄片的垂直方向施加磁 场强度为B的磁场,那么在垂直于电流 和磁场的方向上将产生电势UH(称为霍 尔电势或霍尔电压)。这种现象称为霍 尔效应。
霍尔效应原理图
• 把一块宽为b,厚为d的导电板放在磁感应 强度为B的磁场中,并在导电板中通以纵向 电流I ,此时在板的横向两侧面 , 之间就呈 现出一定的电势差,这一现象称为霍尔效 , 应(霍尔效应可以用洛伦兹力来解释), 所产生的电势差UH称霍尔电压。
3.678mm 2.514mm 1.980mm 测微头读数图
霍尔传感器(直流激励)位移实验接线示意图
调零
• 把霍尔元件调到两个磁钢的1/2处。 • 用RW1调零,先把电压表设在20v调到小于 2v时再设在2v调零,当电压小于200mv时 再设到200mv调零。 • 调零后把电压表设置在2v挡做实验。
• 3、测位移使用测微头时,当来回调节微分 筒使测杆产生位移的过程中本身存在机械 回程差,为消除这种机械回差可用单行程 位移方法实验:顺时针调节测微头的微分 筒4周,记录电压表读数作为位移起点。以 后,反方向(逆时针方向) 调节测微头的微分 筒(0.01mm/每小格),每隔△X=0.1mm(总 位移可取4mm)从电压表上读出输出电压Vo 值,将读数填入表中 (这样可以消除测微头 的机械回差)。
• 4、根据表数据作出V-X实验曲线,分析曲 线在不同测量范围 (±0.5mm、±1mm、 • ±2mm)时的灵敏度和非线性误差。实验完 毕,关闭电源。
霍尔式传感器应用设计报告
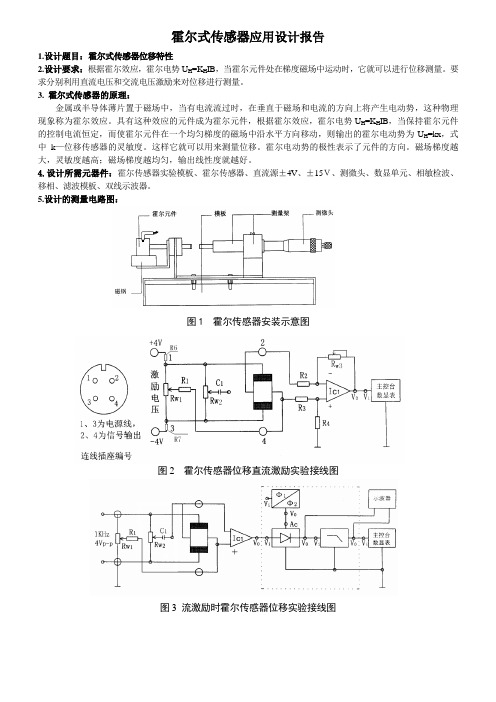
霍尔式传感器应用设计报告1.设计题目:霍尔式传感器位移特性2.设计要求:根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量。
要求分别利用直流电压和交流电压激励来对位移进行测量。
3. 霍尔式传感器的原理:金属或半导体薄片置于磁场中,当有电流流过时,在垂直于磁场和电流的方向上将产生电动势,这种物理现象称为霍尔效应。
具有这种效应的元件成为霍尔元件,根据霍尔效应,霍尔电势U H=K H IB,当保持霍尔元件的控制电流恒定,而使霍尔元件在一个均匀梯度的磁场中沿水平方向移动,则输出的霍尔电动势为U H=kx,式中k—位移传感器的灵敏度。
这样它就可以用来测量位移。
霍尔电动势的极性表示了元件的方向。
磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线性度就越好。
4.设计所需元器件:霍尔传感器实验模板、霍尔传感器、直流源±4V、±15V、测微头、数显单元、相敏检波、移相、滤波模板、双线示波器。
5.设计的测量电路图:图1 霍尔传感器安装示意图图2 霍尔传感器位移直流激励实验接线图图3 流激励时霍尔传感器位移实验接线图6.调试过程及结果分析:(1)直流激励时霍尔式传感器1、将霍尔传感器按图1安装。
霍尔传感器与实验模板的连接按图2进行。
1、3为电源±4V,2、4为输出。
2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节R W1使数显表指示为零。
3、旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变。
灵敏度分析:灵敏度定义为测量元件的输出y相对于其输入x的变化率,故而全桥电路中金属箔应变片的灵敏度为:而由绘制的曲线可知S=0.8006,近似为一个常数。
非线性误差:由上面计算可得U=SX U=0.8006X-1.5916≈0.8*(X-2)于是计算可得:U(0)=-1.6V,U(1.0)=-0.8V,U(2.0)=0V,U(3.0)=0.8V,U(4.0)=1.6V,由此可得在各处的非线性误差为:E(0)=0.007V,E(1.0)=0.004V,E(2.0)=0.001V,E(3.0)=0.01V,E(4.0)=0.65V由上面的非线性误差计算可以得出如下结论:在越远离平衡点(2.0mm)处的非线性误差越大,测量结果的非线性越明显,测量结果也就越不准确!(二)交流激励时霍尔式传感器1、将霍尔传感器按图1安装。
传感器与检测技术综合实验 有数据及答案
实验报告本课程名称:传感器与检测技术综合实验指导教师:班级:姓名:学号:2013~2014学年第一学期广东石油化工学院计算机与电子信息学院实验目录实验一金属箔式应变片――单臂电桥性能实验实验二金属箔式应变片――半桥性能实验实验三金属箔式应变片――全桥性能实验实验四金属箔式应变片单臂、半桥、全桥性能比较实验实验五直流激励时线性霍尔传感器的位移特性实验实验六霍尔转速传感器测电机转速实验实验七磁电式转速传感器的测电机转速实验实验八电涡流传感器的位移特性实验实验九光纤传感器的位移特性实验实验十光电转速传感器的转速测量实验实验一金属箔式应变片――单臂电桥性能实验一、实验目的:了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。
二、基本原理:电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为:ΔR/R=Kε式中:ΔR/R为电阻丝电阻相对变化,K为应变灵敏系数,ε=ΔL/L为电阻丝长度相对变化。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位受力状态变化。
电桥的作用完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
对单臂电桥输出电压U o1= EKε/4。
三、需用器件与单元:主机箱(±4V、±15V、电压表)、应变式传感器实验模板、1位数显万用表(自备)。
托盘、砝码、42图1 应变片单臂电桥性能实验安装、接线示意图四、实验步骤:应变传感器实验模板说明:实验模板中的R1、R2、R3、R4为应变片,没有文字标记的5个电阻符号下面是空的,其中4个组成电桥模型是为实验者组成电桥方便而设,图中的粗黑曲线表示连接线。
1、根据图1〔应变式传感器(电子秤传感器)已装于应变传感器模板上。
传感器中4片应变片和加热电阻已连接在实验模板左上方的R1、R2、R3、R4和加热器上。
传感器左下角应变片为R1;右下角为R2;右上角为R3;左上角为R4。
电容、霍尔、光纤传感器测位移

实验十六电容式传感器的位移实验一、实验目的:了解电容式传感器结构及其特点。
二、基本原理:1、原理简述:电容传感器是以各种类型的电容器为传感元件,将被测物理量转换成电容量的变化来实现测量的。
电容传感器的输出是电容的变化量。
利用电容C=εA/d关系式通过相应的结构和测量电路可以选择ε、A、d中三个参数中,保持二个参数不变,而只改变其中一个参数,则可以有测干燥度(ε变)、测位移(d变)和测液位(A变)等多种电容传感器。
电容传感器极板形状分成平板、圆板形和圆柱(圆筒)形,虽还有球面形和锯齿形等其它的形状,但一般很少用。
本实验采用的传感器为圆筒式变面积差动结构的电容式位移传感器,差动式一般优于单组(单边)式的传感器。
它灵敏度高、线性范围宽、稳定性高。
如图16—1所示:它是有二个圆筒和一个圆柱组成的。
设圆筒的半径为R;圆柱的半径为r;圆柱的长为x,则电容量为C=ε2 x/ln(R/r)。
图中C1、C2是差动连接,当图中的圆柱产生∆X位移时,电容量的变化量为∆C=C1-C2=ε2 2∆X/ln(R/r),式中ε2 、ln(R/r)为常数,说明∆C与∆X位移成正比,配上配套测量电路就能测量位移。
图16—1实验电容传感器结构1、测量电路(电容变换器):测量电路画在实验模板的面板上。
其电路的核心部分是图16—2的二极管环路充放电电路。
图16—2二极管环形充放电电路在图16—2中,环形充放电电路由D3、D4、D5、D6二极管、C4电容、L1电感和C X1、C X2(实验差动电容位移传感器)组成。
当高频激励电压(f>100kHz)输入到a点,由低电平E1跃到高电平E2时,电容C X1和C X2两端电压均由E1充到E2。
充电电荷一路由a点经D3到b点,再对C X1充电到O点(地);另一路由由a点经C4到c点,再经D5到d点对C X2充电到O点。
此时,D4和D6由于反偏置而截止。
在t1充电时间内,由a到c点的电荷量为:Q1=C X2(E2-E1)(16—1)当高频激励电压由高电平E2返回到低电平E1时,电容C X1和C X2均放电。
检测技术_压力传感器霍尔传感器

实验十压阻式压力传感器的压力测量实验一、实验目的了解扩散硅压阻式压力传感器测量压力的原理和方法。
二、基本原理扩散硅压阻式压力传感器在单晶硅的基片上扩散出P 型或N 型电阻条,接成电桥。
在压力作用下根据半导体的压阻效应,基片产生应力,电阻条的电阻率产生很大变化,引起电阻的变化,我们把这一变化引入测量电路,则其输出电压的变化反映了所受到的压力变化。
三、实验器材主机箱、压阻式压力传感器、压力传感器实验模板、引压胶管。
四、实验步骤1、将压力传感器安装在实验模板的支架上,根据图4-1 连接管路和电路(主机箱内的气源部分,压缩泵、贮气箱、流量计已接好)。
引压胶管一端插入主机箱面板上气源的快速接口中(注意管子拆卸时请用双指按住气源快速接口边缘往内压,则可轻松拉出),另一端口与压力传感器相连。
压力传感器引线为4芯线:1端接地线,2端为U0+,3端接+4V电源,4端为Uo-。
图4-1 压阻式压力传感器测压实验安装、接线图2、实验模板上RW2用于调节放大器零位,RW1调节放大器增益。
按图4-1将实验模板的放大器输出V02 接到主机箱电压表的Vin插孔,将主机箱中的显示选择开关拨到2V 档,合上主机箱电源开关,RW1 旋到满度的1/3 位置(即逆时针旋到底再顺时针旋2圈),仔细调节RW2使主机箱电压表显示为零。
3、合上主机箱上的气源开关,启动压缩泵,逆时针旋转转子流量计下端调压阀的旋钮,此时可看到流量计中的滚珠向上浮起悬于玻璃管中,同时观察气压表和电压表的变化。
4、调节流量计旋钮,使气压表显示某一值,观察电压表显示的数值。
5、仔细地逐步调节流量计旋钮,使压力在2~18KPa之间变化,每上升1KPa 气压分别读取电压表读数,将数值列于表4-1。
表4-1P(KPa) 2 3 4 5 6 7 8 9 10V o(p-p)P(KPa) 11 12 13 14 15 16 17 18V o(p-p)6、画出实验曲线计算本系统的灵敏度和非线性误差。
实验四霍耳式传感器静态位移测量
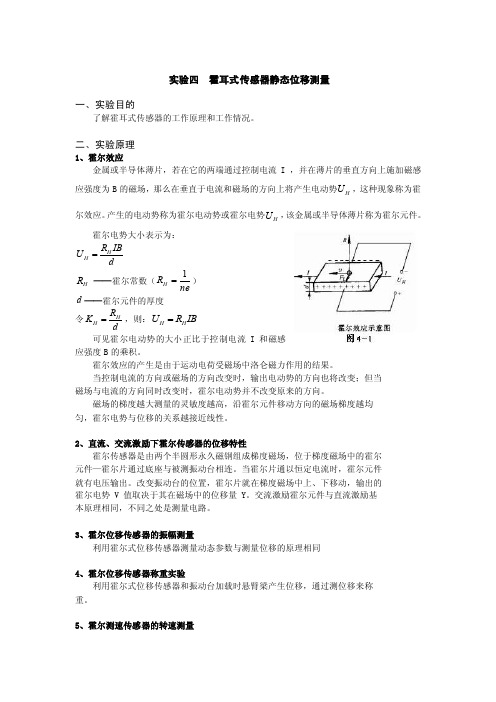
实验四 霍耳式传感器静态位移测量一、实验目的了解霍耳式传感器的工作原理和工作情况。
二、实验原理1、霍尔效应金属或半导体薄片,若在它的两端通过控制电流I ,并在薄片的垂直方向上施加磁感应强度为B 的磁场,那么在垂直于电流和磁场的方向上将产生电动势H U ,这种现象称为霍尔效应。
产生的电动势称为霍尔电动势或霍尔电势H U ,该金属或半导体薄片称为霍尔元件。
霍尔电势大小表示为:H H R IBU d=H R ——霍尔常数(1H R ne=) d ——霍尔元件的厚度令H H RK d=,则:H H U R IB =可见霍尔电动势的大小正比于控制电流I 和磁感应强度B 的乘积。
霍尔效应的产生是由于运动电荷受磁场中洛仑磁力作用的结果。
当控制电流的方向或磁场的方向改变时,输出电动势的方向也将改变;但当 磁场与电流的方向同时改变时,霍尔电动势并不改变原来的方向。
磁场的梯度越大测量的灵敏度越高,沿霍尔元件移动方向的磁场梯度越均 匀,霍尔电势与位移的关系越接近线性。
2、直流、交流激励下霍尔传感器的位移特性霍尔传感器是由两个半圆形永久磁钢组成梯度磁场,位于梯度磁场中的霍尔 元件—霍尔片通过底座与被测振动台相连。
当霍尔片通以恒定电流时,霍尔元件 就有电压输出。
改变振动台的位置,霍尔片就在梯度磁场中上、下移动,输出的 霍尔电势 V 值取决于其在磁场中的位移量 Y 。
交流激励霍尔元件与直流激励基 本原理相同,不同之处是测量电路。
3、霍尔位移传感器的振幅测量利用霍尔式位移传感器测量动态参数与测量位移的原理相同4、霍尔位移传感器称重实验利用霍尔式位移传感器和振动台加载时悬臂梁产生位移,通过测位移来称 重。
5、霍尔测速传感器的转速测量利用霍尔效应表达式:UH=KHIB,当被测圆盘上装上N只磁性体时,圆盘每转一周磁场就变化 N 次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
三、所需单元和部件霍耳式传感器、直流稳压电源、差动放大器、电桥、测微器、V/F 表有关旋钮的初始位置:直流稳压电源输出置于 0V 档,V/F 表置于V表20V档, 差动放大器增益旋钮置于中间。
实验十四 交流激励时霍尔式传感器位移特性实验
汕头大学实验报告
学院: 工学院系: 电子系专业: 通信工程年级: 2008 成绩:
姓名: 黄兰凤学号: 08142013 合作者:植碧彬实验时间: 2010//12/3 指导教师签字: _______________________________________________________________________________ 实验十四交流激励时霍尔式传感器位移特性实验
一,实验目的
了解交流激励时霍尔式传感器的特性。
二,实验器件
主机箱,霍尔传感器实验模板,霍尔传感器,测微头,移相器,相敏检波器,低通滤波器,双踪示波器。
三,基本原理
根据霍尔效应,霍尔电势,当霍尔元件处在梯度磁场中运动时,它的电动势发
生变化,利用这一特性进行位移测量。
四,实验内容
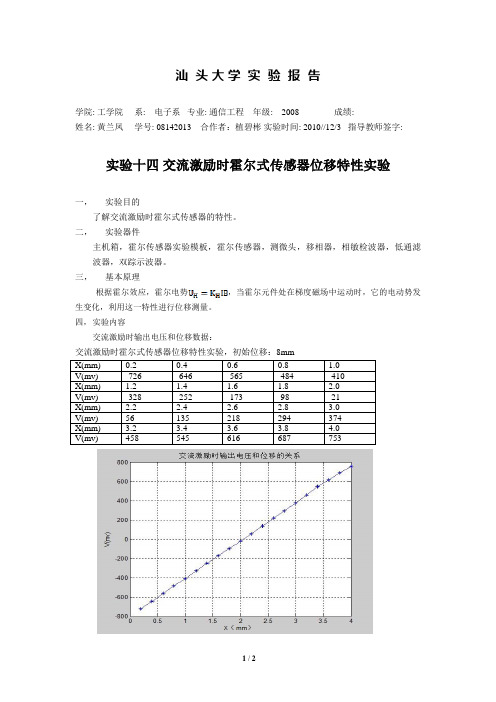
交流激励时输出电压和位移数据:
交流激励时霍尔式传感器位移特性实验,初始位移:8mm
计算1mm,2mm,3mm,4mm不同线性范围时的灵敏度和非线性误差。
五,思考题
1,查阅资料,列举一些霍尔传感器的应用实例。
解:位移测量 ,简易磁场强度计 ,用做开关。
2,查阅资料,结合以上实验,说明直流激励和交流激励时霍尔传感器进行位移测量的特点,并比较直流激励和交流激励时霍尔传感器的灵敏度和非线性误差。
解:直流激励和交流激励时霍尔式传感器进行测量时,磁场梯度越大,灵敏度越高。
磁场梯度越均匀,输出的线性度越好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验 直流激励时霍尔传感器的位移特性实验
传感器的种类繁多,传感器技术是一门分散型技术.又是一门知识密集性技
术。它涉及物理、化学、生物、材料、电子学等几乎所有的科学技术。
一、实验目的:
1、掌握霍尔传感器工作原理与应用;
2、通过静态位移量输入了解霍尔传感器工作特性。
二、实验仪器:
霍尔传感器模块(THSRZ-1型)或(DH-CG2000型)、霍尔传感器、测微头、
直流电源、数显电压表。
三、实验原理:
霍尔传感器是根据霍尔效应制作的一种磁场传感器,霍尔效应是磁电效应的
一种,这一现象是霍尔(A.H.Hall,1855—1938)于1879年在研究金属的导电
机构时发现的。后来发现半导体、导电流体等也有这种效应,而半导体的霍尔效
应比金属强得多,利用这现象制成的各种霍尔元件,广泛地应用于工业自动化技
术、检测技术及信息处理等方面。霍尔效应是研究半导体材料性能的基本方法。
通过霍尔效应实验测定的霍尔系数,能够判断半导体材料的导电类型、载流子浓
度及载流子迁移率等重要参数。
1、霍耳元件置于磁感应强度为B的磁场中,在垂直于磁场方向通以电流I,
则与这二者垂直的方向上将产生霍耳电势差UH 。
BIKUH (1)
(1)式中K为元件的霍耳灵敏度。如果保持霍耳元件的电流I不变,而使其在
一个均匀梯度的磁场中移动时,则输出的霍耳电势差变化量为:
ZdZdBIKUH
(2)
(2)式中Z为位移量,此式说明若dZdB为常
数时,HU与Z成正比。
为实现均匀梯度的磁场,可以如图1所示
两块相同的磁铁(磁铁截面积及表面磁感应强
度相同)相对放置,即N极与N极相对,两
磁铁之间留一等间距间隙,霍耳元件平行于磁铁放在该间隙的中轴上。间隙大小
图 1
要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就
越高。磁铁截面要远大于霍耳元件,以尽可能的减小边缘效应影响,提高测量精
确度。
若磁铁间隙内中心截面处的磁感应强度为零,霍耳元件处于该处时,输出的
霍耳电势差应该为零。当霍尔元件偏离中心沿Z轴发生位移时,由于磁感应强度
不再为零,霍尔元件也就产生相应的电势差输出,其大小可以用数字电压表测量。
由此可以将霍尔电势差为零时元件所处的位置作为位移参考零点。
霍尔电势差与位移量之间存在一一对应关系,当位移量较小(<2mm),这
一一对应关系具有良好的线性。
四、实验内容与步骤
(一)THSRZ-1型的实验仪器的实验步骤
1.在霍尔传感器模块上,按图2接线。
2.开启电源,直流数显电压表选择“2V”档,将测微头的起始位置调到“1cm”
处,手动调节测微头的位置,先使霍尔片大概在磁钢的中间位置(数显表大致为
0),固定测微头,再调节Rw1使数显表显示为零。
3.分别向左、右不同方向旋动测微头,每隔0.2mm记下一个读数,直到读
数近似不变,将读数填入下表
X(mm)
U(mV)
图2 霍尔传感器直流激励接线图(THSRZ-1型)
(二)DH-CG2000型的实验仪器的实验步骤
所需单元及部件:霍耳传感器、差动放大器、V/F表、直流稳压电源、测微
头。
有关旋钮初始位置:差动放大器增益旋钮打到最小,电压表置200mv档,直
流稳压电源置2V档。
图3 霍尔传感器直流激励接线图(DH-CG2000型)
1、按图3接线:w1、r1为电桥单元中的直流平衡网络。
2、开启主、副电源将差动放大器调零后,增益旋到最小,关闭主、副电源。
3、调节测微头与振动台吸合并使霍耳片置于半园磁钢上下正中位置。
4、开启主、副电源,调整w1使电压表指示为零(必要时调整测微头)。
4、上下旋动测微头,记下电压表的读数,建议每0.2mm读一个数,从15.0mm
到5.00mm左右为止。将读数填入下表:
X(mm)
V(v)
X(mm)
V(v)
五、数据处理
作出U-X曲线,计算不同线性范围时的灵敏度并定性给出结论。