五面体加工中心零点计算公式的使用
(整理)五面体加工中心坐标系偏移旋转与误差补偿.
摘要:目前国内五面体加工中心在立、卧头转换时,通常只进行简单的坐标系偏移补偿,通过G17、G18、G19来选择各个加工面。如果采用坐标系旋转的方式,使Z轴始终沿主轴方向,更易于编程。本文根据实际加工经验,讲解坐标系偏移、旋转和误差补偿的方法。 五面体加工中心是目前国内大型加工设备中比较先进的。以我厂现使用中的沈机中捷THA57200×400、GMC2560r2、GMC2560wr3为例,控制系统采用西门子840D。沈阳机床厂通常采用两种方式来补偿立、卧头的差值: 1、执行转头程序L01(newpos)就完成补偿变换; 2、执行完转头程序L01(newpos)后,再通过执行子程序L11完成变换。 其实这两种方式本质上没有什么区别,只是方式1中的L01(newpos)程序整合了方式2中的L01(newpos)和L11程序。 下面我们通过沈阳机床厂提供的说明及程序源码来分析一下其误差补偿程序的原理。 首先,机床厂提供一个用户数据文件UGUD.arc: %_N_UGUD_DEF ;$PATH=/_N_DEF_DIR DEF NCK REAL DTT[50] ;用于记录各头各角度偏移值(编者注)DEF NCK REAL HEAD[10] ;用于记录头号(编者注) M17 HEAD[1]变量来表示当前头,如HEAD[1]=1表示当前是1号头,
HEAD[1]=2表示当前是2号头……0为立头。 上述对当前头号的标识由厂商添加到相应子程序中,如在HEAD_1.SPF子程序结束符“M17”之前添加“HEAD[1]=1”;在HEAD_2.SPF子程序结束符“M17”之前添加“HEAD[1]=2”等。 DTT[]用于表示卧头在各个角度时相对于立头的偏差值: ;头1: 0°或180°时 DTT[11] 主轴轴心与C 轴在X 向的偏差 DTT[12] 主轴轴心与C 轴在Y 向的偏差 DTT[13] 主轴轴心与C 轴在Z 向的偏差 90°或270° DTT[14] 主轴轴心与C 轴在X 向的偏差 DTT[15] 主轴轴心与C 轴在Y 向的偏差 DTT[16] 主轴轴心与C 轴在Z 向的偏差 上面的各个数据由厂商在调试时自己测量并设定到用户变量里面去。 我们通过查看L11程序,发现厂商使用的补偿方法其实是修改基准零点坐标系BNS来实现的。 如1号卧头处于0°方向时: $P_UBFR[X,TR]=-DTT[11] $P_UBFR[Y,TR]=-DTT[12] $P_UBFR[Z,TR]= -DTT[13] 1号卧头处于180°方向时:
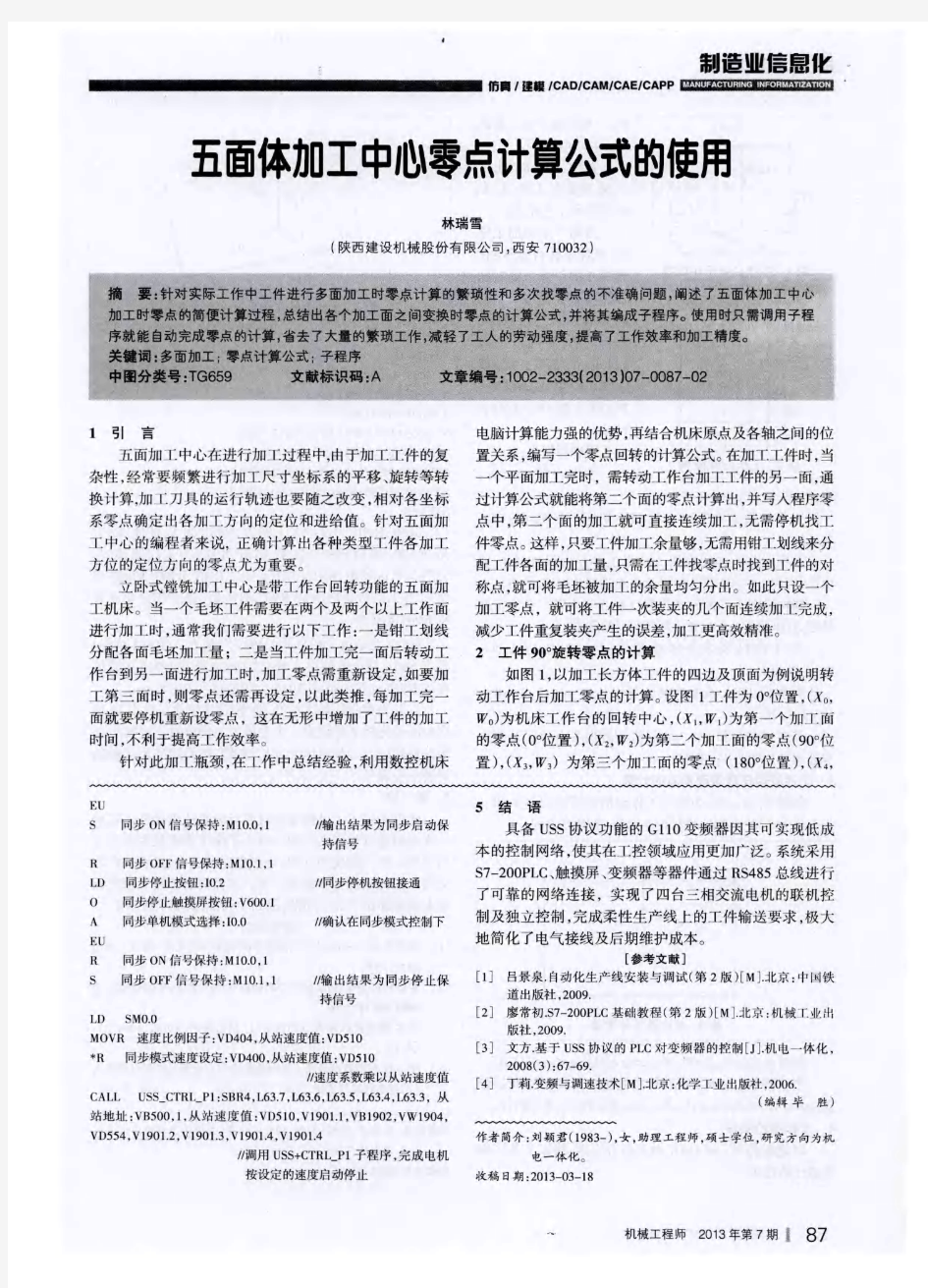
常用计算公式
常用计算公式: 1、钢板拉伸: 原始截面积=长×宽 原始标距=原始截面积的根号×L0=K S0 k为S0为原始截面积 断后标距-原始标距 断后伸长率= ×100% 原始标距 原始截面积—断后截面积 断面收缩率= ×100% 原始截面积 Z=[(A0—A1)/A0]100% 2、圆材拉伸: 2 原始截面积= 4 (= D=直径)标距算法同钢板 3、光圆钢筋和带肋钢筋的截面积以公称直径为准,标距=5×钢筋的直径。断后伸长同钢板算法。 4、屈服力=屈服强度×原始截面积 最大拉力=抗拉强度×原始截面积 抗拉强度=最大拉力÷原始截面积 屈服强度=屈服力÷原始截面积 5、钢管整体拉伸:
原始截面积=(钢管外径—壁厚)×壁厚×(=) 标距与断后伸长率算法同钢板一样。 6、抗滑移系数公式: N V=截荷KN P1=预拉力平均值之和 nf=2 预拉力(KN)预拉力之和滑移荷载Nv(KN) 第一组425 第二组345 428 第三组343 424 7、螺栓扭矩系数计算公式:K= P·d
T=施工扭矩值(机上实测) P=预拉力 d=螺栓直径 已测得K 值(扭矩系数)但不知T 值是多少可用下列公式算出:T=k*p*d T 为在机上做出实际施拧扭矩。K 为扭矩系数,P 为螺栓平均预拉力。D 为螺栓的公称直径。 8、螺栓标准偏差公式: K i =扭矩系数 K 2=扭矩系数平均值 用每一组的扭矩系数减去平均扭矩系数值再开平方,八组相加之和,再除于7。再开根号就是标准偏差。 例:随机从施工现场抽取8 套进行扭矩系数复验,经检测: 螺栓直径为22 螺栓预拉力分别为:186kN ,179kN ,192kN ,179kN ,200kN ,205kN ,195kN ,188kN ; 相应的扭矩分别为: 530N ·m ,520N ·m ,560N ·m ,550N ·m ,589N ·m ,620N ·m , 626N ·m ,559N ·m K=T/(P*D) T —旋拧扭矩 P —螺栓预拉力 D —螺栓直径(第一步先算K 值,如186*22=4092 再用530/4092=,共算出8组的K 值,再算出这8组的平均K 值,第二步用每组的K 值减去平均K 值,得出的数求出它的平方,第三步把8组平方数相加之和,除于7再开根号。得出标准差。 解:根据规范得扭矩系数: 2 1 ()1n i i K K n σ=-=-∑
龙门机床横梁导轨加工
动梁龙门机床横梁导轨加工
目录 一、概述 二、横梁有限元分析 一)横梁结构特点及工作状态分析 二)横梁静态分析 三)横梁导轨分析结果处理 三、横梁导轨加工 一)效验横梁导轨有限元分析结果 二)检测加工设备精度 三)横梁导轨加工 四、结束语 五、参考文献 一.概述
装备制造业是整个工业的基础,而机床行业更是装备制造业的基础。近几年我国加大了对装备制造业的投入, 机床行业也在这个时期得到了突飞猛进的发展。无论是从 产量上,还是产品规模上,中国机床行业都已经在世界机 床行业中占据了重要的地位。 随着装备制造业的不断发展,“先进制造技术”的概念被提出。装备制造业逐渐向精密化、极端化方向发展,因 此近几年机床行业的主要发展方向是大型重切削机床和小 型高精密机床。我国机床行业近几年也开始转变发展方向,将进一步提高机床的精度作为主要的发展方向。 动梁龙门移动式机床结构是最适合大型重切削机床,而从整个动梁龙门移动式机床的结构分析。横梁零件即直 接决定机床Y轴精度,又间接影响机床的Z轴精度。再从 横梁零件的工作状态分析,横梁即受本身自重变形影响, 又受Z轴工作时产生的力影响。因此,可以看出横梁零件 是影响机床Y轴、Z轴两个方向精度的主要零件,而其零件 本身的受力情况又比较复杂。 所以,提高横梁零件的加工精度,对提高机床精度以及横梁零件的加工工艺都具有很大的意义。 二. 横梁有限元分析
一)横梁结构特点及工作状态分析 图1,动梁龙门机床整体结构图 动梁龙门机床的主要结构如上图1所示,其运动特性是:两组床身是机床的X轴,整个龙门框架在两组床身上移动;两个立柱是机床的W轴,横梁在立柱上沿导轨上下移动;横梁是机床的Y轴,滑枕和滑板沿横梁导轨左右移动;滑枕在滑板中上下移动是机床的Z轴。 按上图1所示,横梁零件主要承受的力由两方面产生:一是横梁自身的重量。按龙门机床的结构特点分析,横梁两端支撑,中间悬空。随着机床Y轴行程的增大,横梁自身变形量也会相应的增大。二是滑板、滑枕和铣头体等零件在横梁上移动,导致横梁产生的变形。
FANUC数控机床机械原点的设置及回零常见故障分析
FANUC数控机床机械原点的设置及回零常见故障分析 当前大多数数控机床均采用通过减速档块的方式回零,但谊方式在日常使用中故障率却艰高,有时甚至出现机械原点的丢失。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对该类数控机床常见回零故障的各种形式式进行了分析与总结。 机械原点是机床生产厂家在生产机床时任机床上设置的一个物理位置,可以使控制系统和机床能够同步,从而建立起一个用于测量机床运动坐标的起始位置点,通常也是程序坐标的参考点。大多数数控机床在开机后都需要回零即回机械原点的操作。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对此类数控机床常见回零故障的各种形武进行了分析与总结。 1 机械原点设置 1.1 机械原点丢失的原因 台中精机生产的VCENTER-70加工中心采用增量编码器作为机床位置的检测装置。系统断电后,工件坐标系的坐标值就会失去记忆,尽管靠电池能够维持坐标值的记忆,但只是记忆机床断电前的坐标值而不是机床的实际位置,所以机床首次开机后要进行返回参考点操作。而当系统断电遇到电池没电或特殊情况失电时,就会造成机械原点的丢失.从而使机床回参考点失败而无法正常工作。此时机床会产生。#306 n轴电池电压0#的报警信息,并且还会产生机械坐标丢失报警。#300第n轴原点复位要求”(n代指X、Y、Z)。 1.2 机械原点的设置 在通常情况下,设置数控机床机械原点的方法主要有以下两种:1)手动使X、Y、Z三轴超程印利用三轴的极限位置选择机械原点。2)利用各坐标轴的伺服检溯反馈系统提供相应基准脉冲来选择机床参考点即机械原点。由于第一种方法是机床厂家通常建议的也是较为简便和实用的方法.因此本文在此详细介绍第1种做法。以X轴为例,设置步骤如下: (1)将机床操作面板上的方式选择开关设定为MDI方式。 (2)按下机床MDI面板上的功能键[OFS/SET]数次,进入设定画面。 (3)将写参数中的0改为1,由此,系统进入了参数可写状态。此时机床出现。SWO 100参数写入开关处于打开”的报警信息。忽略这条报警信息,设置完参数后改回为0即可。 (4)按下功能键lsYSTEM】,进入系统参数键面。通过参数搜索找到参数1815(如表l 所示)通常情况下,X轴的#4APZ或#5 APC会显示为0,若不为0就将其设定为0。 (5)找到参数1320,此参数为存储各轴正向行程的坐标值。将其X轴的正向行程设定为最大值999999。目的是让X轴的正向软限位位置值大于其正向硬限位的位置值。 (6)将方式选择开关打到手轮方式,然后摇动手轮使工作台碰及X轴的正向限位档块,此时机床会出现“#500+X过行程”报警。
加工中心的基本操作
加工中心教案 一.主轴功能及主轴的正、反转 主轴功能又叫S功能,其代码由地址符S和其后的数字组成。用于指定主轴转速,单位为r/min,例如,S250表示主轴转速为250r/min. 主轴正、反转及停止指令M03、M04、M05 M03表示主轴正转(顺时针方向旋转)。所谓主轴正转,是从主轴往Z正方向看去,主轴处于顺时针方向旋转。 M04表示主轴反转(逆时针方向旋转)。所谓主轴反转,是从主轴往Z正方向看去,主轴处于逆时针方向旋转。 M05为主轴停转。它是在该程序段其他指令执行完以后才执行的。 如主轴以每分钟2500转的速度正转,其指令为:M03 S2500。 二.刀具功能及换刀 刀具功能又叫T功能,其代码由地址符T和其后的数字组成,用于数控系统进行选刀或换刀时指定刀具和刀具补偿号。例如T0102表示采用1号刀具和2号刀补。 如需换取01号刀,其指令为:M06 T01。 三.机床坐标系及工件坐标系 机床坐标系:用机床零点作为原点设置的坐标系称为机床坐标系。 机床上的一个用作为加工基准的特定点称为机床零点。机床制造厂对每台机床设置机床零点。机床坐标系一旦设定,就保持不变,直到电源关掉为止。 工件坐标系:加工工件时使用的坐标系称作工件坐标系。工件坐标系由CNC 预先设置。 一个加工程序可设置一个工件坐标系。工件坐标系可以通过移动原点来改变设置。 可以用下面三种方法设置工件坐标系: (1)用G92法 在程序中,在G92之后指定一个值来设定工件坐标系。 (2)自动设置 预先将参数NO。1201#0(SPR)设为1,当执行手动返回参考点后,就自动设定了工件坐标系。
(3)使用CRT/MDI面板输入 使用CRT/MDI面板输入可以设置6个工件坐标系。G54工件坐标系1、G55工件坐标系2、G56工件坐标系3、G57工件坐标系4、G58工件坐标系5、G59工件坐标系6。 工件坐标系选择G54~G59 说明: G54~G59是系统预定的6个工作坐标系(如图5.10.1),可根据需要任意选用。 这6个预定工件坐标系的原点在机床坐标系中的值(工件零点偏置值)可用MDI方式输入,系统自动记忆。 工件坐标系一旦,后续程序段中绝对值编程时的指令值均为相对此工件坐标系原点的值。 G54~G59为模态功能,可相互注销,G54为缺省值。
龙门加工中心技术协议
合同编号: GMC308MS龙门加工中心 技术协议 一、设备技术描述、参数及配置 二、设备主要零部件品牌 三、SIEMENS 840Dsl系统主要功能表 四、制造厂商培训 五、设备推荐用油和油脂表 六、设备客户安调准备表 七、设备通用要求及安装、调试 八、设备验收 九、质量保证 十、其他 十一、机床外观图 甲方(买方):乙方(卖方): 代表:代表: 年月日年月日
一、设备技术描述、参数及配置 1、设备技术描述 GMC3080MS型龙门加工中心主要适用于航空、航天、汽车、军工、能源、信息、模具等行业的零件加工。以加工黑色和有色金属大中型复杂零件为对象,具有高精度、高速度、高柔性、环保等特点。其性能指标和精度指标完全符合国家标准。产品经模块化设计,可以按市场需求进行产品系列化和客户化制造,其良好的性能价格比是国内外客户的最佳选择。 整机结构:机床采用龙门框架移动,工作台固定的结构。基础大件均采用优质树脂砂造型、高强度铸铁材料铸造而成,使机床得到高刚性和稳定的精度。主要铸件均经过 有限元分析,筋格布置合理,充分满足机床高扭矩切削的需要。 主轴箱:主轴箱采用方滑枕结构,选用进口主轴,扭矩大、转速高、噪音低,充分满足镗铣及钻孔加工要求。配置西门子系列主轴电机,满足低速恒扭矩和高速恒功 率切削需要。外置编码器,对主轴的位置进行精确反馈,满足刚性攻丝的需要。 油冷却机对主轴降温,提高轴承使用寿命,降低主轴热变形对加工精度造成影 响。 导轨:床身导轨(X轴)为重载滚柱直线导轨,摩擦力小、承载能力强、高速振动小、低速无爬行、定位精度高。横梁导轨(Y轴)为铸铁镶钢导轨,并且设置了卸 荷机构,INA滚动体与滑动导轨组成复合导轨,减少了滑动摩擦阻力,提高机 床定位精度和重复定位精度。主轴箱导轨(Z轴)为四面封闭式环抱滑动导轨, 即铸铁贴塑摩擦副,有良好的吸振性,保证加工时切削平稳,特别适用于主轴 伸长强力铣削,大孔镗削及使用角度头的五面加工。 驱动:X、Y、Z三个坐标轴均采用西门子系列进给电机驱动,三轴均标配光栅尺,稳定性能好,运行可靠。X、Y进给轴采用伺服电机通过减速机驱动齿轮齿条传 动,其中X轴采用左右各两个伺服电机,共四个伺服电机进行双驱同步控制, 以及相邻两个伺服电机采用主从驱动,利用电气控制消除齿轮齿条传动的反向 间隙,Y轴采用两个伺服电机左右分布在滑鞍两侧,进行主从驱动,也利用电 气控制消除齿轮齿条传动的反向间隙,提高了定位精度和重复定位精度的保持 性;Z轴采用双螺母滚珠丝杠驱动,进行预拉伸,并且Z轴滚珠丝杠为双驱结 构,工作更加平稳。 系统:配置高性能西门子840Dsl数控系统,保证了机床控制的稳定性,也保证了用户要求的数控加工功能和辅助功能。 可选配置:FANUC 31i数控系统、刀库、直角头、延伸铣头、深镗铣头、万能铣头等。 机床所有零部件加工、装配成品质量符合产品图纸及相关技术要求,其安全标准符合GB15760-2004《金属切削机床安全防护通用技术条件》的有关规定,其精度标准符合GB/T17421-2000《机床检验通则》及ISO8636.2-2007《龙门铣床检验条件》的有关规定。
加工中心对刀原理及方法
加工中心对刀原理及方 法 -CAL-FENGHAI.-(YICAI)-Company One1
一线员工职业技能等级鉴定 申报论文 (高级技师) 题目:数控加工中心刀具对刀原理方法及其应用! 单位: 姓名: 申报工种: 2016年4月18日
摘要 数控加工操作中的对刀好坏不仅直接影响到加工零件的精度,还会影响数控机床的操作。对刀的过程牵涉到一系列的步骤,在实际操作中往往会出现一些具体的问题,因此通过对数控加工中心对刀的基本原理、对刀的方法并结合具体的数控加工中心的操作特点对对刀方法进行了阐述。 关键词:数控加工中心;对刀原理;对刀方法
目录 摘要 ........................................................................................................... 错误!未定义书签。绪论 (4) 一、对刀基本原理 (5) 二、对刀基本方法及运用 (5) 、用对刀探头对刀 (6) 用机外对刀仪对刀 (6) 用对刀器对刀 (7) 用试切法对刀 (8) 结论 (11) 参考文献 (12)
绪论 数控加工操作中的对刀好坏不仅直接影响到加工零件的精度,还会影响数控机床的操作。当工件坐标系确定之后,还要确定刀位点在工件坐标系中的位置。也就是确定工件坐标系与机床坐标系之间的关系,要让刀具在数控程序的控制下使加工对象相对于定位基准有正确的尺寸关系。由于数控机床所用的刀具各种各样,刀具寸也极不统一。在编制加工中心数控程序时,一般不考虑刀具规格及安装位置,加工前由操作者通过对刀将测出的刀具在主轴上的伸出长度及其直径等补偿参数输入数控系统,进行刀具补偿,通常把这一过程称为对刀。对刀的过程牵涉到一系列的步骤,如对刀基本原理、对刀方法的选择和对刀参数的设置等等。在实际操作中往往会出现一些具体的问题,因此通过数控加工中心对刀的基本原理、对刀的方法并结合具体的数控加工中心的操作特点对对刀方法进行了阐述。
五轴加工中心优点及特点【详解】
五轴加工中心优点 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 一、五轴加工中心的概念 五轴加工中心也叫五轴联动加工中心,是一种科技含量高、精密度高专门用于加工复杂曲面的加工中心,这种加工中心系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控加工中心系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 五轴联动加工中心有高效率、高精度的特点,工件一次装夹就可完成复杂的加工。能够适应像汽车零部件、飞机结构件等现代模具的加工。五轴加工中心和五面体加工中心是有很大区别的。很多人不知道这一点,误把五面体加工中心当做五轴加工中心。五轴加工中心有x,y,z,a,c五个轴,xyz和ac轴形成五轴联动加工,擅长空间曲面加工,异型加工,镂空加工,打孔,斜孔,斜切等。而“五面体加工中心”则是类似于三轴加工中心,只是它可以同时做五个面,但是它无法做异型加工,打斜孔,切割斜面等。
二、五轴加工中心的应用前景 五轴加工中心不仅应用于民用行业,例如木模制造,卫浴修边,汽车内饰件加工,泡沫模具加工,欧式风格家居,实木椅子等,还广泛应用于航空、航天、军事、科研、精密器械、高精医疗设备等行业。五轴加工中心是一种高科技的手段,它让不可能变成了可能,一切的空间曲面,异型加工都可以完成实现。它不但能够完成复杂工件完成机械化加工的任务,而且还能够快速提高加工效率,缩短加工流程。 三、五轴加工中心的优点 五轴加工中心优势一是可以加工一般的三轴数控机床所不能加工或着它不能一次性就能完成加工的自由曲面。如,飞机发动机和汽轮机的叶片,舰艇的螺旋推进器,其他的有特殊曲面的复杂模具等。由于五轴加工中心的刀具和角度在加工过程中可以随时调整,就可以避免其他刀具的妨碍而且能一次性完成全部加工。 五轴加工中心在效果高的前提下,也可以实现自由曲面的加工精度、和质量。如,三轴机床加工复杂的曲面时,要用球头铣刀,它的切削效率低,而且刀具的角度不能自由调整,所以很难保证加工表面质量的光滑度。但是用五轴加工中心机床加工,因为刀具的角度是可以自由调整的,就可以避免以上情况的发生,从而能获得更高的切削效率和优质的加工表面质量。 五轴加工中心有3种结构形式和3种运动配置方式,这2者一结合,就得到了9
怎么计算各中加工中心刀具的切削速度
质量+效率+成本控制=效益怎么计算各中加工中心刀具的切削速度浏览次数:202次悬赏分:10 | 解决时间:2011-3-3 10:15 | 提问者:zhaoqizhi521 问题补充: 例如:(16,20,25,32,50,63,80,125)平面铣刀,(1~20)涂层合金立铣刀,(1~30)钨钢钻,(6~80)镗刀((求切削速度切削用量))不是公式,公式我知道,就是刀具的切削用量,切削速度!! 最佳答案 S=Vc*1000/*D F=S*fz*z 刀具线速度(刀具商提供)乘以1000再除去再除掉刀具直径就等于主轴转数; 主轴转数乘以每齿进刀量(刀具不同进刀量不同)再乘以刀具总齿数就等于进给速度; 高速钢铣刀的线速度为50M/MIN 硬质合金铣刀的线速度为150M/MIN 切削用量的话是每齿切削之间。 切削速度为转速*齿数*每齿进给。 不锈钢的话*80% 铝合金本身材料很软,主轴转速应当高点(刀具能承受的情况下),进给速度要竟量小点,如果进给大的话排屑就会很困难,只要你加工过铝,不难发现刀具上总会有粘上去的铝,那说明用的切削液不对, 做铝合金进给可以打快一点 每一刀也可以下多一点
转数不能打的太快10MM F1500 20MM F1200 50MM F1000 加工中心-三菱系统的操作步骤与刀具应用 (2009-04-23 09:02:03)转载标签:数控刀具转速进给杂谈 三菱系统操作: 1,打开机床开关—电源接通按钮 2,归零:将旋钮打到ZRN—按循环启动键,三轴同时归零。(也可以xyz分开来归零:将 旋钮打到ZRN—按Z+,X+,Y+,一般要先将Z轴归零)注意:每次打开机床后,就要归零。 3,安装工件(压板或虎口钳) 4,打表(平面和侧面)侧面打到2丝之内,表面在5丝之内,最好再打一下垂直度。 5,中心棒分中,转速500. 6,打开程序,看刀具,装刀具,注意刀具的刃长和需要的刀长,绝不能装短了。7,模拟程序—传输程序。 8,将旋钮打到DNC,进给打到10%,RAPID OVERRIDE打到0%—然后在RAPID上在0%~25%上快速转换。刀具会在工件上方50mm处停顿一下,当刀具靠近工件时需要特别注意。进给需要打到零。看看刀具与工件的距离与机床显示的残余值是否对应。 9,最后调整转速与进给。
龙门加工中心的结构特点【深度解析】
龙门加工中心的结构特点【深度解析】 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、砂轮、自动化、数字无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展。 龙门加工中心的结构分类 龙门加工中心的龙门架由两个立柱、横梁、滑鞍等部件组成,龙门加工中心根据龙门架可为定梁式、动梁式和动柱式龙门加工中心。顶梁式龙门加工中心的横梁固定,工作台移动;动梁式龙门加工中心的横梁上下移动,工作台诚前后移动;动柱式龙门加工中心工作台固定,龙门架移动。龙门加工中心都是主轴与工作台为垂直状态的,比较适合加工大型类的零件。 龙门加工中心的应用 龙门加工中心属于大机床,是专门为了加工大零件而设计的大型机床,主要应用于重工业行业,比如飞机、汽车、船舶等重型行业中,主要加工大型复杂形状的工件,比如加工飞机的梁、框以及大型机械上的某些零件等。总而言之龙门加工中心是为了加工大型复杂零件而设计的一款大型机床,适用于各个行业中,特别是大型零件行业。 龙门镗铣加工中心分类 龙门镗铣加工中心主要适合对平面、孔和其它型腔复杂面进行加工。配置 各种形式的附件铣头,工件一次夹装就可以完成工件五面体的加工。在针
对工件的宽度大、长度长、重量重的情况下,就要选择不同的机型来对应产品的加工。 龙门镗铣加工中心在总体布局上分定龙门和动龙门,同时还分定梁和动梁。桥式布局方式也属于动龙门的一种形式。在这里我们主要把龙门移动工作台固定和定龙门工作台移动,在形式上和精度上做一比较。随着信息技术和计算机数字化技术不断发展,数控机床的性能和效率也不断在提高。目前档次较高的数控系统已经具备高效、高精度,适应于复杂曲面和空间孔系的加工,但对机床整体就要求刚性好、精度高、有热变形补偿、切削力强、稳定性佳、数控系统反响速度快,有自动监控等功能。 对于定龙门数控镗铣加工中心也就是工作台移动数控机床,它的工作台移动有直流或交流伺服电动机通过蜗轮蜗杆、滚珠丝杆和齿轮齿条等形式进行对X轴向的传动,选择传动形式是根据不同长度和不同要求的重要。在工作台移动长度超过8m时,一般厂家都会采用双齿轮齿条这种传动的方式。工作台的运动轨迹是依照水平面的直线度和垂直于水平面的直线度两个方向运行的。保证加工产品的精度也是一项重要指标。这种定龙门数控机床X轴向的导轨长度是该工作台长度的2倍,其中不包括两侧防护罩的长度,所以对厂房来说占用面积较大。 工作台移动式数控龙门镗铣机床,它的工作台移动摩擦形式又可以分为动摩擦和静摩擦两种,在动摩擦形式里有多种如滚珠和滚柱加预载形式的直线导轨、滚动体导轨以及滚动和滑动结合的组合式复合导轨以及完全动摩擦等形式的结构形式。其中直线导轨和滚动体导轨比较适合轻载高速切削
加工中心刀具转速-1
普通加工中心钨钢平铣刀的切削参数 切削材料模具钢料(30≤硬度HRC≤40) 刃径(d) 转速(S) 进刀(F) 切削量(H) 0.5 6000-8000 250 0.005 1 6000-8000 300 0.01 1.5 6000-8000 300 0.015 2 6000-8000 350 0.02 2.5 6000-8000 350 0.02 3 3500-4500 500 0.03 4 2500-3500 600 0.05 5 2500-3000 800 0.05 6 1800-2500 1000 0.08 8 1500-2000 1000 0.08-0.15 10 1200-1800 1100 0.1-0.2 12 1000-1500 1200 0.2-0.3 14 1000-1200 1200 0.2-0.3 16 1000-1200 1200 0.25-0.35 切削材料黄铜(硬度HRC≤30 铍铜硬度HRC35-42) 刃径(d) 转速(S) 进刀(F) 切削量 0.5 6000-8000 300 0.01 1 6000-8000 300 0.01 1.5 6000-8000 350 0.01 2 6000-8000 350 0.02 2.5 6000-8000 350 0.02 3 4500-5000 600 0.03 4 4000-4500 800 0.05 5 3500-4000 1000 0.05 6 3000-3500 1000 0.1 8 2500-3000 1000 0.1-0.2 10 2000-2500 1200 0.2-0.3 12 1500-2000 1300 0.3-0.5 14 1500-2000 1500 0.3-0.5 16 1200-1500 1600 0.5 注解: 1 以上参数是以普通加工中心(主轴转速最高8000)的钨钢铣刀为准,它的表面硬度一般是 HRC45-55(洛氏硬度)左右 2 以上参数是以挖槽(又名等高铣,Cavity_Mill)为准,若是铣外形,则可以多点切削量, 如¢12的铣铜,切削量可以给0.8-1MM
五轴加工中心简介(有用)
五轴加工中心简介 立式(三轴)最有效的加工面仅为工件的顶面,卧式加工中心借助回转工作台,也只能完成工件的四面加工。目前高档的加工中心正朝着五轴(以及五轴以上)控制的方向发展,工件一次装夹就可完成五面体的加工。如配置上五轴联动的高档数控系统,还可以对复杂的空间曲面进行高精度加工。 这类加工中心的回转轴有两种方式,一种是工作台回转轴。设置在床身上的工作台可以环绕X轴回转,定义为A轴,A轴一般工作范围+30度至-120度。工作台的中间还设有一个回转台,在图示的位置上环绕Z轴回转,定义为C轴,C 轴都是360度回转。这样通过A轴与C轴的组合,固定在工作台上的工件除了底面之外,其余的五个面都可以由立式主轴进行加工。A轴和C轴最小分度值一般为0.001度,这样又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。A 轴和C轴如与XYZ三直线轴实现联动,就可加工出复杂的空间曲面,当然这需要高档的数控系统、伺服系统以及软件的支持。这种设置方式的优点是主轴的结构比较简单,主轴刚性非常好,制造成本比较低。但一般工作台不能设计太大,承重也较小,特别是当A轴回转大于等于90度时,工件切削时会对工作台带来很大的承载力矩。 另一种是依靠立式主轴头的回转。主轴前端是一个回转头,能自行环绕Z 轴360度,成为C轴,回转头上还带可环绕X轴旋转的A轴,一般可达±90度以上,实现上述同样的功能。这种设置方式的优点是主轴加工非常灵活,工作台也可以设计的非常大,客机庞大的机身、巨大的发动机壳都可以在这类加工中心上加工。这种设计还有一大优点:我们在使用球面加工曲面时,当中心线垂直于加工面时,由于球面铣刀的顶点线速度为零,顶点切出的工件表面质量会很差,采用主轴回转的设计,令主轴相对工件转过一个角度,使球面铣刀避开顶点切削,保证有一定的线速度,可提高表面加工质量。这种结构非常受高精度曲面加工的欢迎,这是工作台回转式加工中心难以做到的。为了达到回转的高精度,高档的回转轴还配置了圆光栅尺反馈,分度精度都在几秒以内,当然这类主轴的回转结构比较复杂,制造成本也较高。
加工中心常用计算公式
三角函数计算 1.tanθ=b/a θ=tan-1b/a 2.Sinθ=b/c Cos=a/c 二、切削速度的计算 Vc=(π*D*S)/1000 Vc:线速度(m/min) π:圆周率(3.14159) D:刀具直径(mm) S:转速(rpm) 例题. 使用Φ25的铣刀Vc为(m/min)25求S=?rpm Vc=πds/1000 25=π*25*S/1000 S=1000*25/ π*25 S=320rpm 三、进给量(F值)的计算 F=S*Z*Fz F:进给量(mm/min) S:转速(rpm) Z:刃数 Fz:(实际每刃进给) 例题.一标准2刃立铣刀以2000rpm)速度切削工件,求进给量(F 值)为多少?(Fz=0.25mm) F=S*Z*Fz F=2000*2*0.25 F=1000(mm/min) 四、残料高的计算 Scallop=(ae*ae)/8R Scallop:残料高(mm) ae:XYpitch(mm) R刀具半径(mm)
例题.Φ20R10精修2枚刃,预残料高0.002mm,求Pitch为多 少?mm Scallop=ae2/8R 0.002=ae2/8*10 ae=0.4mm 五、逃料孔的计算 Φ=√2R2 X、Y=D/4 Φ:逃料孔直径(mm) R刀具半径(mm) D:刀具直径(mm) 例题. 已知一模穴须逃角加工(如图), 所用铣刀为ψ10;请问逃角孔最小 为多少?圆心坐标多少? Φ=√2R2 Φ=√2*52 Φ=7.1(mm) X、Y=D/4 X、Y=10/4 X、Y=2.5 mm 圆心坐标为(2.5,-2.5) 六、取料量的计算 Q=(ae*ap*F)/1000 Q:取料量(cm3/min) ae:XYpitch(mm)ap:Zpitch(mm) 例题. 已知一模仁须cavity等高加工,Φ35R5的刀XYpitch是刀具的60%,每层切1.5mm,进给量为2000mm/min,求此刀具的取料量为多少? Q=(ae*ap*F)/1000 Q=35*0.6*1.5*2000/1000 Q=63 cm3/min
系统零点设置
FANUC系统原点设定 FANUC系统使用绝对编码器时,在提示电池电压低未及时更换新电池时就会造成原点丢失,必需重新设原点,并且在原点丢失后,第二参考点也需重新设定,否则换刀会出问题。 涉及的参数包括:1815(原点设定)、1320(正限位)、1321(负限位)、1241(第二参考点)。 1815号参数中可以看到APC(是否使用绝对编码器)、APZ(机械位置与原点位置是否重合)参数,在电池没电时,APC保持为1,APZ自动变为0。具体原点设定步骤如下: 1、在驱动器上先插上新电池。 2、先找到参数3299,(按下屏幕上的system键,然后上下翻页)这个 是程序锁。将最右边那一位改成0。(此时程序锁已经解除) 3、找到设定中,【写参数】这一项。将其修改为1.(此时可以修改程序 了) 4、【对于三轴机床将1320号、1321号X\Y\Z参数先记下来,然后将1320里面的值全改为99999999, 1321里面的值改为-999999999,这样在设原点时不会出现超程报警。】此步为非必须。
5、用手轮将X、Y、Z轴按原先回零时的方向移动,大概到原先原点位 置时,可以看着对应轴的负载表(在机床坐标系画面,按下显示屏右下方的向右箭头,然后选择监控就能看到各轴负载了),当对应轴负载呈增大趋势时,说明已到最大行程,把此点相对坐标清零,然后往回移动几毫米,如3mm。按这个方法就可以确定三个轴的原点位置。注意:Z轴的原点设定时要保证主轴下端高于机械手上端面。 6、将1815号参数的三个轴的APZ都改为1,一般改完一个轴后就会提 示要关机重启,可以不理会,直到三个轴改完再关机重启。重启后再检查下1815号参数,若APC、APZ都为1,说明原点已经设定好了。 (若原点未设定成功,可以先将三轴的APC、APZ先都改为0,关机重启后将APC改为1,然后关机重启后再将APZ改为1,最后关机重
加工中心常用计算公式
CNC常用计算公式 一、三角函数计算 1.tanθ=b/aθ=tan-1b/a 2.Sinθ=b/c Cos=a/c 二、切削速度的计算 Vc=(π*D*S)/1000 Vc:线速度(m/min) π:圆周率(3.14159) D:刀具直径(mm) S:转速(rpm) 例题. 使用Φ25的铣刀Vc为(m/min)25 求S=?rpm Vc=πds/1000 25=π*25*S/1000 S=1000*25/ π*25 S=320rpm 三、进给量(F值)的计算 F=S*Z*Fz F:进给量(mm/min) S:转速(rpm) Z:刃数 Fz:(实际每刃进给) 例题.一标准2刃立铣刀以2000rpm)速度切削工件,求进给量(F 值)为多少?(Fz=0.25mm) F=S*Z*Fz F=2000*2*0.25 F=1000(mm/min) 四、残料高的计算 Scallop=(ae*ae)/8R Scallop:残料高(mm) ae:XY pitch(mm) R刀具半径(mm) 例题. Φ20R10精修2枚刃,预残料高0.002mm,求Pitch为多 少?mm Scallop=ae2/8R 0.002=ae2/8*10 ae=0.4mm 五、逃料孔的计算 Φ=√2R2X、Y=D/4 Φ:逃料孔直径(mm) R刀具半径(mm) D:刀具直径(mm) 例题. 已知一模穴须逃角加工(如图), 所用铣刀为ψ10;请问逃角孔最小 为多少?圆心坐标多少? Φ=√2R2 Φ=√2*52 Φ=7.1(mm) X、Y=D/4 X、Y=10/4 X、Y=2.5 mm 圆心坐标为(2.5,-2.5) 六、取料量的计算 Q=(ae*ap*F)/1000 Q:取料量(cm3/min)ae:XY pitch(mm) ap:Z pitch(mm) 例题. 已知一模仁须cavity等高加工,Φ35R5的刀XY pitch是刀具的60%,每层切1.5mm,进给量为2000mm/min,求此刀具的取料量为多少? Q=(ae*ap*F)/1000
加工中心设置零点两种方法
两种方法: A、对准标记设定参考点 在机床上设置对准标记,注意对于磨床使用倾斜轴控制功能的轴上不能使用本功能。 准备工作: a:1005#1设为1——各轴返回参考点不使用挡块方式 此时返回参考点就不需要使用减速信号*DEC。 b:1815#5设为1——使用绝对位置编码器 1815#4设为0——绝对位置编码器原点位置未确立 1006#5设为0——返回参考点方向为正向 c:切断NC电源,断开主断路器 d:把绝对位置编码器的电池连接到伺服放大器上 e:接通电源 自动检测编码器基准点(检测编码器的1转信号) (如果未进行此项操作继而进行参考点回零的话出现PS0090号报警) a:用手动或者手轮方式进给,让机床电机转动1转以上 b:断开电源再接通电源 设定参考点 a:JOG方式下对各轴手动移动,将机床移动到1006#5设定的反方向处,例如上面设的1006#5为0即返回参考点方向为正向,则将机床移至负向,如下图:b:按1006#5设定的返回参考点的方向移动机床,直至机床对准标记与参考点位置重合,当位置快要重合时使用手轮进给进行微调。 c:将1815#4设为1——绝对位置编码器原点位置已确立。 B、无挡块返回参考点 不需要安装限位开关和挡块 准备工作: a:1005#1设为1——各轴返回参考点不使用挡块方式 此时返回参考点就不需要使用减速信号*DEC。 b:1815#5设为1——使用绝对位置编码器 1815#4设为0——绝对位置编码器原点位置未确立 1006#5设为0——返回参考点方向为正向 c:切断NC电源,断开主断路器 d:把绝对位置编码器的电池连接到伺服放大器上 e:接通电源 自动检测编码器基准点(检测编码器的1转信号) (如果未进行此项操作继而进行参考点回零的话出现PS0090号报警) a:用手动或者手轮方式进给,让机床电机转动1转以上
丝攻攻牙常用的计算公式【非常实用】
丝攻攻牙常用的计算公式,非常实用 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 一、挤牙丝攻内孔径计算公式: 公式:牙外径-1/2×牙距 例1:公式:M3×0.5=3-(1/2×0.5)=2.75mm M6×1.0=6-(1/2×1.0)=5.5mm 例2:公式:M3×0.5=3-(0.5÷2)=2.75mm M6×1.0=6-(1.0÷2)=5.5mm 二、一般英制丝攻之换算公式: 1英寸=25.4mm(代码) 例1:(1/4-30) 1/4×25.4=6.35(牙径) 25.4÷30=0.846(牙距) 则1/4-30换算成公制牙应为:M6.35×0.846 例2:(3/16-32) 3/16×25.4=4.76(牙径) 25.4÷32=0.79(牙距)
则3/16-32换算成公制牙应为:M4.76×0.79 三、一般英制牙换算成公制牙的公式: 分子÷分母×25.4=牙外径(同上) 例1:(3/8-24) 3÷8×25.4=9.525(牙外径) 25.4÷24=1.058(公制牙距) 则3/8-24换算成公制牙应为:M9.525×1.058 四、美制牙换算公制牙公式: 例:6-32 6-32 (0.06+0.013)/代码×6=0.138 0.138×25.4=3.505(牙外径) 25.4÷32=0.635(牙距) 那么6-32换算成公制牙应为:M3.505×0.635 1、孔内径计算公式: 牙外径-1/2×牙距则应为: M3.505-1/2×0.635=3.19 那么6-32他内孔径应为3.19 2、挤压丝攻内孔算法: 下孔径简易计算公式1: 牙外径-(牙距×0.4250.475)/代码=下孔径
加工中心切削参数
加工中心.数控铣床.刀具名称.转速进给、下刀量例:立铣刀必备知识(按照加工45号钢材) 刀具名称、转速(/min)、进给(mm/min)、下刀量(mm) 63R6(刀片) 600 2500-3000 0.6-1 50R6(刀片) 650-850 2500-3000 0.55-0.7 25R5(刀片) 1200 2000-2500 0.45-0.55 32R6(刀片) 700-1200 2000-2500 0.5-0.65 16R0.8(刀片) 2000-2500 2000-3000 0.25-0.35 16R4(刀片) 2200-2500 2200-3000 0.3-0.4 16(球头刀 2000-2500 2000 0.25-0.35 12(球头刀 2200-2500 2000-3000 0.25 10(球头刀 2500 1800-2000 0.2-0.25 8(球头刀 2500-2800 1500-1800 0.2 6(球头刀 4000 1500-1800 0.1-0.2 4(球头刀 5000-6000 1800 0.1 3(球头刀 7000 1500-1800 0.05-0.08 2(球头刀 12000 1500-2000 0.05-0.08 1.5(球头刀 16000 1200-1500 0.05 1(球头刀 20000 1200 0.05 0.5(球头刀 20000 500 0.02 3.175(球头刀 7000 1500 0.08 30R5(平底立铣) 720-1000 2000-3000 0.3-0.5 40(平底立铣) 300-600 2000-2500 1.0-2.0
【CN109954917A】一种用于五面体加工的铣头自动交换结构【专利】
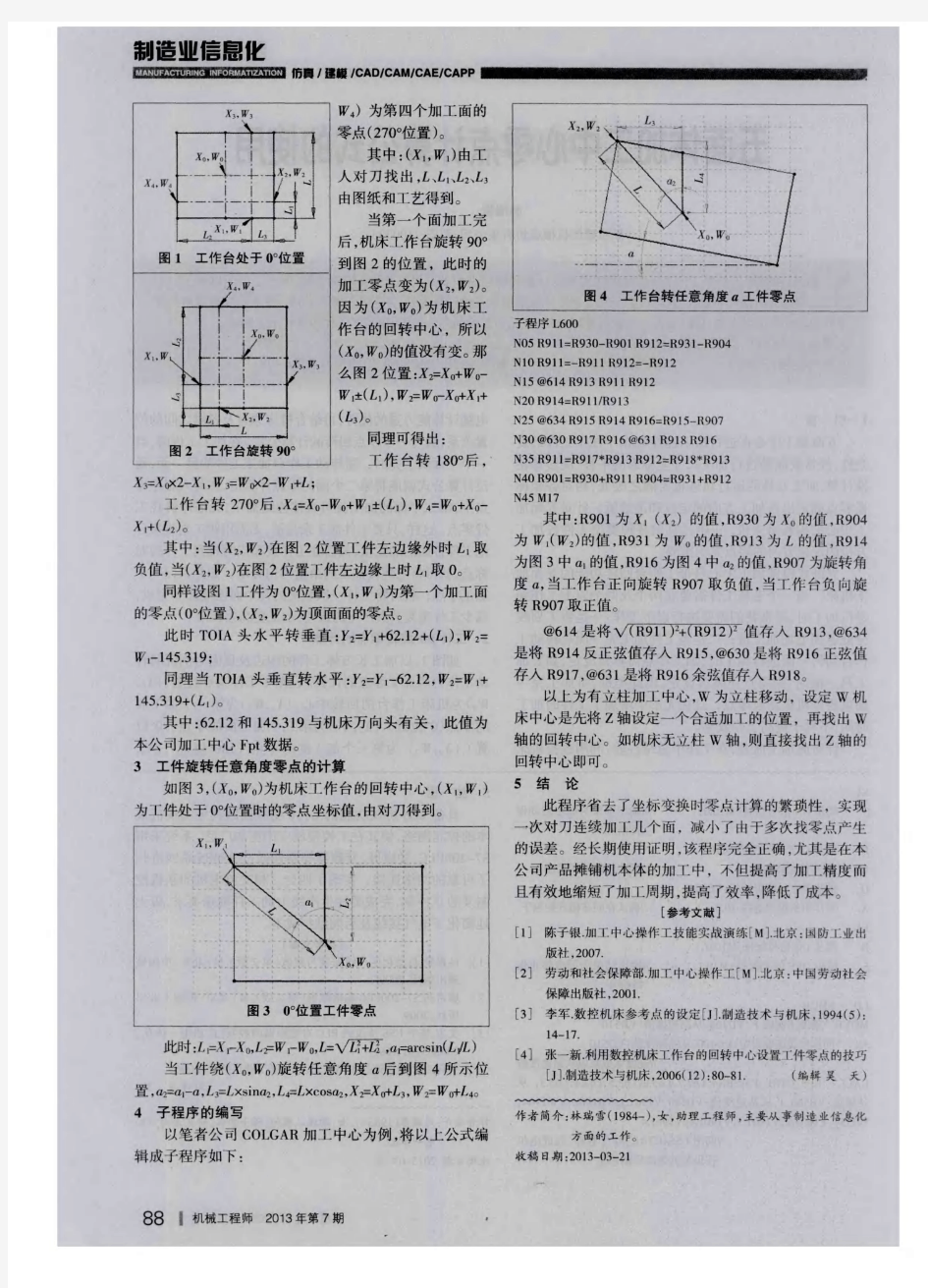
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910345142.4 (22)申请日 2019.04.26 (71)申请人 广东润星科技有限公司 地址 523598 广东省东莞市谢岗镇银湖工 业区 (72)发明人 潘少平 罗文耀 杨东 祝烽 (74)专利代理机构 广州市华学知识产权代理有 限公司 44245 代理人 李盛洪 (51)Int.Cl. B23C 9/00(2006.01) B23Q 1/25(2006.01) (54)发明名称 一种用于五面体加工的铣头自动交换结构 (57)摘要 本发明提供了一种用于五面体加工的铣头 自动交换结构,包括主轴箱和连接盘,所述连接 盘安装在主轴箱底部,所述主轴箱四周内部通过 调整垫安装有自动拉紧机构,所述自动拉紧机构 顶部安装有拉钉,所述自动拉紧机构底部穿过连 接盘,所述自动拉紧机构内安装有主轴单元,所 述主轴单元底部安装有铣头,所述连接盘内安装 有电插头和多个快速接头,所述连接盘中心位置 安装有铣头定位锥,所述连接盘两侧安装有定位 键,该于五面体加工的铣头自动交换结构配维修 不方便, 不能够实现快速精准定位更换部件。权利要求书1页 说明书3页 附图4页CN 109954917 A 2019.07.02 C N 109954917 A
权 利 要 求 书1/1页CN 109954917 A 1.一种用于五面体加工的铣头自动交换结构,包括主轴箱(4)和连接盘(1),其特征在于,所述连接盘(1)安装在主轴箱(4)底部,所述主轴箱(4)四周内部通过调整垫(3)安装有自动拉紧机构(2),所述自动拉紧机构(2)顶部安装有拉钉(7),所述自动拉紧机构(2)底部穿过连接盘(1),所述自动拉紧机构(2)内安装有主轴单元(5),所述主轴单元(5)底部安装有铣头(11),所述连接盘(1)内安装有电插头(9)和多个快速接头(8),所述连接盘(1)中心位置安装有铣头定位锥(6),所述连接盘(1)两侧安装有定位键(10)。 2.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述主轴箱(4)与主轴单元(5)传动连接。 3.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述主轴单元(5)中心线与铣头(11)中心线重合。 4.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,两个所述定位键(10)呈对称设置。 5.根据权利要求4所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述定位键(10)镶嵌在连接盘内。 6.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述自动拉紧机构(2)为内嵌式自动拉紧机构。 7.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述电插头(9)和快速接头(8)环绕在铣头定位锥(6)外侧。 8.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述自动拉紧机构(2)设有四个。 9.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述铣头(11)通过连接盘(1)上的定位止口(12)与主轴单元(5)卡持连接。 10.根据权利要求1所述的一种用于五面体加工的铣头自动交换结构,其特征在于,所述电插头(9)穿过连接盘(1)进入到主轴箱(4)内。 2