齿轮啮合刚度单位
基于ANSYS的齿轮接触应力与啮合刚度研究共3篇

基于ANSYS的齿轮接触应力与啮合刚度研究共3篇基于ANSYS的齿轮接触应力与啮合刚度研究1齿轮作为一种常用的传动元件,在机械系统的运转中发挥着重要的作用。
因此,对于齿轮的力学性能研究具有重要的意义。
本文以ANSYS软件为工具,研究齿轮接触应力与啮合刚度的相关问题。
一、齿轮模型的建立齿轮模型的建立是研究齿轮力学性能的基础。
初步建模需要确定齿轮参数、材料参数等。
在本次研究中,我们选取了一个模数为4的齿轮进行建模,在材料参数选取方面,我们选择了常用的20CrMnTi材料,以其为基础进行实验。
建模之后需要进行网格划分,网格密度的选择会影响后续分析的准确性以及计算时间,因此需要选择合适的密度。
选取太粗的网格会导致结果失真,选取太细的网格则会消耗大量的计算时间。
本次研究选取了相对均匀的中等密度网格,以保证结果的准确性。
二、齿轮接触应力分析齿轮在啮合过程中会产生接触应力,这对于齿轮的寿命和工作效率都有着至关重要的作用。
因此,研究齿轮接触应力,选择适当的润滑方式,对齿轮寿命和传动效率都有着重要的意义。
在ANSYS中进行齿轮接触应力的分析和计算,需要考虑到许多复杂的因素,如齿形、材料参数、润滑方式等。
在本次研究中我们采用了基于有限元方法的接触分析(FEM),对齿轮接触应力进行评估。
得到接触应力的结果后,我们可以对齿轮的寿命进行评估,并针对接触应力过大的地方进行优化处理。
三、齿轮啮合刚度分析除了接触应力之外,齿轮的啮合刚度对于传动的效率和精度也有着重要的影响。
啮合刚度是指啮合中两齿之间相对于轴线方向的相对运动能力,也可以视为齿轮在啮合过程中的弹性变形程度。
齿轮的啮合刚度与齿轮副的堆叠误差、硬度、几何尺寸等的影响有关。
在本次研究中,我们采用了ANSYS的非线性有限元分析方法,对齿轮的啮合刚度进行建模和优化。
通过对啮合刚度的研究,我们可以指导齿轮的加工和优化,提高其传动效率和精度。
四、总结本次研究基于ANSYS对齿轮接触应力和啮合刚度进行了研究。
斜齿轮副时变啮合刚度计算方法
斜齿轮副时变啮合刚度计算方法
斜齿轮副时变啮合刚度是指在实际运行过程中,由于副体尺寸误差、
加工精度等原因导致轮齿的啮合关系发生变化,进而使得副体的刚度发生
变化。
斜齿轮副时变啮合刚度的计算方法主要包括以下几个方面:轮齿啮
合误差计算、副体刚度计算和时变啮合刚度计算。
首先,轮齿啮合误差计算是斜齿轮副时变啮合刚度计算的基础。
根据
啮合误差的定义,可以通过测量轮齿的实际尺寸和理论尺寸之间的差异来
计算。
具体的计算方法包括齿根啮合误差、齿顶啮合误差和齿侧啮合误差等。
其次,副体刚度的计算是斜齿轮副时变啮合刚度计算的关键。
副体刚
度包括副体的刚度系数、副体的刚度矩阵和副体的刚度特性等。
副体刚度
的计算可以通过有限元分析或实验测试等方法获得。
最后,根据轮齿啮合误差和副体刚度,可以计算斜齿轮副的时变啮合
刚度。
时变啮合刚度可以用于评估斜齿轮副在实际运行中的运动特性和工
作性能。
计算时变啮合刚度的方法主要包括静态方法和动态方法。
静态方
法是通过将斜齿轮副视为刚体系统,计算系统在给定位移和外载荷下的刚度;动态方法是通过考虑斜齿轮副的动力学特性,计算系统在给定速度和
加速度下的刚度。
综上所述,斜齿轮副时变啮合刚度的计算方法包括轮齿啮合误差计算、副体刚度计算和时变啮合刚度计算。
这些方法可以用于评估斜齿轮副在实
际工作中的性能,并指导优化设计和制造过程。
锥齿轮承载能力计算方法载荷及一般影响系数
锥齿轮承载能力计算方法载荷及一般影响系数(GB10062-88)详细介绍:7载荷及一般影响系数7.1名义切向力F mt锥齿轮的名义切向力F mt作用于齿宽中点端面分度圆上,由其所传递的名义功率P确定。
名义切向力F mt按式(1)计算:F mt=2000.T/d m(N) (1)式中:d m——齿宽中点分度圆直径,mm;T——名义转矩,N·m;其中:T=9549P/n(N.m) (2)式中:P——名义功率,kW;n——转速,r/min。
通常,名义转矩(或名义功率)是指工作机的额定转矩(或额定功率)。
如果原动机的额定转矩(或额定功率)与从动的工作机相匹配的话,亦可作为确定名义转矩(或名义功率)的根据。
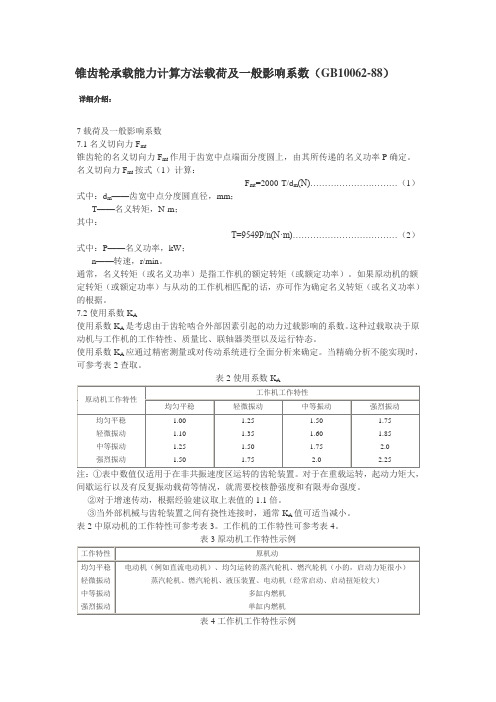
7.2使用系数K A使用系数K A是考虑由于齿轮啮合外部因素引起的动力过载影响的系数。
这种过载取决于原动机与工作机的工作特性、质量比、联轴器类型以及运行特态。
使用系数K A应通过精密测量或对传动系统进行全面分析来确定。
当精确分析不能实现时,可参考表2查取。
表2使用系数K注:①表中数值仅适用于在非共振速度区运转的齿轮装置。
对于在重载运转,起动力矩大,间歇运行以及有反复振动载荷等情况,就需要校核静强度和有限寿命强度。
②对于增速传动,根据经验建议取上表值的1.1倍。
③当外部机械与齿轮装置之间有挠性连接时,通常K A值可适当减小。
表2中原动机的工作特性可参考表3。
工作机的工作特性可参考表4。
表4工作机工作特性示例注;1)额定转矩=最大切削、压制、冲击转矩。
2)额定转矩=最大启动转矩。
3)额定转矩=长时工作的最大轧制转矩。
4)用电流控制力矩限制器。
5)由于轧制带材经常断裂,可提高K A至2.0。
7.3动载系数K A动载系数K V是考虑大、小齿轮啮合振动而产生的内部附加动载荷影响的系数。
动载系数K V定义为齿轮副啮合中最大作用力与纯由外加载荷所产生的相应作用力的比值。
影响动载系数的因素有:a.齿轮精度(周节极限偏差);b.大、小齿轮的回转质量(转动惯量);c.轮齿刚度;d.考虑使用系数K A后的切向力;e.齿面接触状误解;f.轴及轴承的刚度;g.润滑情误解;h.系统阻尼特性。
基于有限元法的齿轮啮合刚度分析

( a )齿轮接触角变形云图
( b J 齿轮的接触情 况
图 3 齿 轮 接 触 示 意 图
值计算方法 , 在求解非 H e r t z 接触问题方面非常有效 、 可靠。 本文基于有 限元方法 , 系统地研究了齿轮的啮合刚度问题。
1齿轮 模型 与处 理 直齿轮轴向所受应力一致, 因此可以用二维模型代替三维模型。本 文运用 P r o / E软件建立一对直齿圆柱齿轮啮合的模型并导入 A N S Y S 中, 然后 , 在主动齿轮和从动齿轮间设置接触 单元 。 随着齿轮的转动, 轮
振 动 方 程 提 供 了数 据 基 础 。
关键词 : 齿轮 ; 啮合刚度 ; 有限元分析 齿轮的啮合是机械领域一个重要的接触问题,涉及相关的动力学 理论 、 表 面技 术 、 材料 科学 等方 面复杂 理论 . 同时 , 齿 轮 啮合 问题具 有 广 泛的1 二 程应用背景, 其中, 齿轮啮合的刚度分析是一个研究热点。 许多研究者对白 } 『 轮啮合的刚度问题开展 了研究。刘鹏等基于势能 法建立了微线段齿轮啮合刚度 计算模型,为微线段齿轮刚度计算提供 了一种简便的理沦计算方法 赵庆彬等分析了面齿轮传动啮合刚度问 题, 建立了面齿轮传动模型, 验证 了理论方法的可靠 £ 口 。还有许多研究 者对 各 应 用领 域 的齿 轮 啮 合刚 度 问题 开 展 了 研究 阳 , 并 取得 了一 系 列 的进展。然而, 有鉴于该问题的复杂眭及其应用的广泛性 , 相关深化研 究亟 待开展 。 有限元接触分析是建立在弹塑性理论和接触 力学基础上的一种数
P旨 卜 州誓 } 删啦 蠢
冒己立 甚 姐罾掣餐嚣 一
图 6 齿轮静传 递误 差曲线
图4为齿轮啮合转角变形言、 , 由图可见 , 在双齿啮合区, 轮齿的啮合变 蛋 立雠 l l I 如 蕾 鼍 摹 刁 聿 翱 形较小 , 在单齿啮合区, 轮齿啮合变形较大。 由图 4的啮合变形曲线求出齿轮的扭转啮合刚度 曲线,如图 5 所 示, k 为模型 1 时计算得到的扭转啮合刚度 。 由图 5中可见 : ( 1 ) 齿轮扭 转啮合刚度曲线具有明显的阶跃型突变性质。主动轮从齿根位置转动 了6 . 8 。附近位置时 , 前一对轮齿退 出啮合 区, 主动轮轮齿处于单齿啮 合区上界点。转动到 1 4 . 2 。附件位置时 , 后一对轮齿开始啮合, 主动轮 处于单齿啮合区下界点。曲线跳跃处对应着单双齿啮合区的交替处 , 这 与齿轮啮合过程 中啮合齿对数瞬时改变的事实相吻合。( 2 ) 不同的啮合 位置 , 每一对啮合轮齿的啮合刚度也不相同。在单齿啮合区内, 刚度值 变化不大。 根据公式 T E = r  ̄ a X△ 0 可求出理想渐开线齿轮啮合的静传递 误差 T E = △ 0 : , 如图 6 所示 , 图中的静传递误差曲线有明显的突变现 象。可见 , 即使是无误差的理想齿轮, 由于齿轮啮合刚度的变化 , 会导致 齿轮传动出现波动, 从而影响齿轮传动的准确 陛。 2 . 3啮合刚度数值处理。 在齿轮动力学研究中, 通常把啮合刚度表示
面齿轮传动啮合刚度数值计算-机械工程论文-工程论文
面齿轮传动啮合刚度数值计算-机械工程论文-工程论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——0、引言作为机械装置中的一个重要零部件,齿轮传动被广泛应用于航空、风电、汽车等领域。
随着工作转速的逐步提高,齿轮传动的动力学性能越来越受到设计、制造及使用者的重视。
相比较其他类型的传动系统,齿轮传动系统的主要不同之处在于: 它不但会因为外部激励而产生动态响应,同时会因为传动过程中啮合齿对数的改变、轮齿的弹性变形及轮齿误差而导致啮合刚度发生变化,从而产生轮齿动态啮合力,且此种由于啮合综合刚度的时变性引起的动态激励是齿轮传动中最主要的动态激励形式之一。
因此,确定齿轮传动的时变啮合刚度一直是齿轮动力学研究中的重要问题。
对于圆柱齿轮的啮合刚度计算问题,已有较多的学者进行过深入研究,得到了一些比较成熟的计算方法。
对于面齿轮及螺旋锥齿轮等结构相对复杂的齿轮传动形式的啮合刚度计算问题,由于其齿面为复杂曲面,要准确计算时变啮合刚度存在较大难度,因此相关研究文献较少。
Gosselin 等基于有限条法给出了计算螺旋锥齿轮刚度的方法,但也只得到了沿齿高和齿长方向的位移曲线,并没有得到刚度曲线。
Mennem等使用有限单元法计算了不同载荷下轮齿接触柔度,获得了时变刚度。
面齿轮传动是近二十年才真正发展起来的一种主要用于航空领域的齿轮传动形式,针对其啮合刚度的计算方法,目前尚未见文献报道。
在面齿轮的动力学研究中,齿轮啮合刚度都采用经过傅里叶变换后的一次正余弦函数来近似,与实际啮合刚度存在比较大的差异。
有学者研究发现,采用近似时变啮合刚度得到的系统动态因子比采用实际啮合刚度时大,而且不能有效地得到系统在低频阶段的动态响应。
因此,采用近似时变啮合刚度来拟合实际啮合刚度研究齿轮传动系统动力学行为,并不能正确反映齿轮系统的动态特性。
本文提出了一种新的齿轮传动时变啮合刚度数值计算方法。
首先以直齿圆柱齿轮为例,建立合理的有限元模型,得到直齿圆柱齿轮时变啮合刚度曲线,并与ISO6336方法计算结果进行对比,说明该啮合刚度计算方法的正确性及有限元模型的精确性; 然后应用该啮合刚度计算方法,研究面齿轮传动时变啮合刚度变化规律,得到精确的面齿轮传动时变啮合刚度曲线。
标准直齿轮的基本参数

标准直齿轮的基本参数直齿轮是一种常见的机械传动装置,具有简单、可靠、传动效率高等特点,在工业生产中得到广泛应用。
了解直齿轮的基本参数对于正确选择、设计和使用直齿轮具有重要意义。
本文将介绍标准直齿轮的基本参数,希望能够对相关领域的工程师和研究人员有所帮助。
1.模数(Module)。
模数是直齿轮齿轮齿廓曲线上的长度单位与齿数的比值,通常用字母M表示。
模数的选择需根据传动功率、转速、齿轮尺寸等因素来确定。
一般来说,模数越大,齿轮的强度和韧性越好,但制造成本也会相应增加。
2.压力角(Pressure Angle)。
压力角是齿轮齿廓曲线与轴线的夹角,通常用字母α表示。
常用的压力角有20°和14.5°两种。
一般来说,压力角越大,齿轮的强度和韧性越好,但传动效率会略有降低。
3.齿数(Number of Teeth)。
齿数是指齿轮上的齿的数量,通常用字母Z表示。
齿数的选择需根据传动比、中心距、工作条件等因素来确定。
一般来说,齿数越多,传动比越大,但齿轮的尺寸和重量也会相应增加。
4.法向模数(Normal Module)。
法向模数是指齿轮齿廓曲线上的长度单位与齿数的比值在法向方向上的投影,通常用字母mn表示。
法向模数的选择需根据齿轮的工作条件和制造工艺来确定。
一般来说,法向模数越大,齿轮的强度和韧性越好,但制造成本也会相应增加。
5.齿宽(Face Width)。
齿宽是指齿轮齿面上的宽度,通常用字母b表示。
齿宽的选择需根据传动功率、工作条件、齿轮材料等因素来确定。
一般来说,齿宽越大,齿轮的承载能力和传动效率越好。
6.顶隙(Addendum)。
顶隙是指齿轮齿顶与基圆之间的距离,通常用字母h_a表示。
顶隙的选择需根据齿轮的工作条件和制造工艺来确定。
一般来说,顶隙越大,齿轮的加工精度要求越低,但传动效率会略有降低。
7.底隙(Dedendum)。
底隙是指齿轮齿根与基圆之间的距离,通常用字母h_f表示。
底隙的选择需根据齿轮的工作条件和制造工艺来确定。
齿轮动力学——精选推荐

(一) 直齿圆柱齿轮传动的扭转振动模型若忽略传动轴的扭转变形,只考虑齿轮副处的变形,则得到最简单的扭转振动模型,如图1所示。
其中r b1、r b2为主从动齿轮的基圆直径,k v 为齿轮副的综合啮合刚度,并且考虑齿轮副的啮合阻尼系数c v 以及齿廓误差e 的作用,主动轮上作用与转动方向相同的驱动力矩T 1,从动轮上作用与转动方向相反的阻力矩T 2图1 齿轮副的扭转振动模型啮合线上的综合变形δi 可写为:1122i b b i r r e δθθ=--(1)设重合度小于2,啮合齿对为i ,法向啮合力可以表示为:()()()11221122i vi i vi i vi b b i vi b b i i i iF F k c k r r e c r r e δδθθθθ⎡⎤==+=--+--⎣⎦∑∑∑ (2) 式中:i 为参与啮合的齿对序号,i =1,2;k vi 、c vi 为齿对i 在啮合点位置的综合啮合刚度和阻尼系数。
主、从动齿轮的力矩平衡方程为:12111222b b J T r F J T r F θθ=-=- (3)将(2)带入(1)中得到:()()()()111112211221222112211222b vi b b i vi b b i i b vi b b i vi b b i iJ r k r r e c r r e T J r k r r e c r r e T θθθθθθθθθθ⎡⎤+--+--=⎣⎦⎡⎤---+--=-⎣⎦∑∑ (4)由此式可看出,即使主动齿轮转速以及传动载荷恒定,由于时变综合刚度k v 的变化,也会使从动轮的转动出现波动,即造成齿轮的圆周振动。
为了方便讨论时变综合刚度k v 对振动方程(4)的影响,定义啮合线上两齿轮的相对位移x 为:1122b b x r r θθ=- (5)不考虑齿轮传动的效率,齿轮的静态啮合力为:12012b b T T F r r ==(6)将式(5)、(6)带入方程(4)中,则可将其简化为一元微分方程:e v v d m x c x k x F ++= (7)式中,m e 称为系统的当量质量:12222112e b b J J m J r J r =+ (8)激振力为:0d vi i vi i iiF F c ek e =++∑∑ (9)根据方程(9)可以将一对齿轮的振动视为单自由度系统的振动,如图2所示。
考虑时变啮合刚度的齿轮动态啮合力分析
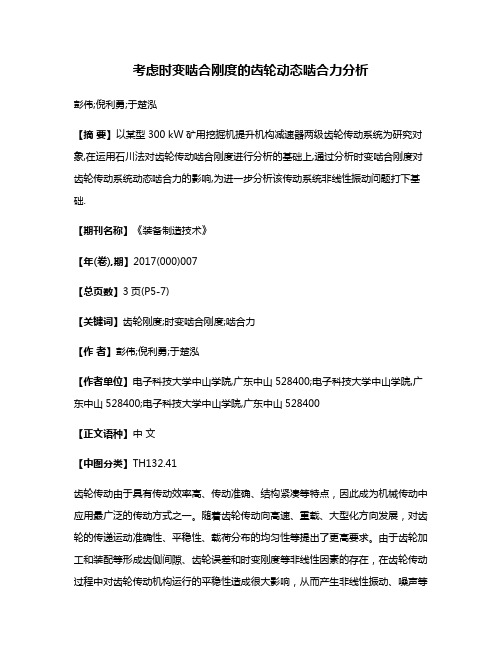
考虑时变啮合刚度的齿轮动态啮合力分析彭伟;倪利勇;于楚泓【摘要】以某型300 kW矿用挖掘机提升机构减速器两级齿轮传动系统为研究对象,在运用石川法对齿轮传动啮合刚度进行分析的基础上,通过分析时变啮合刚度对齿轮传动系统动态啮合力的影响,为进一步分析该传动系统非线性振动问题打下基础.【期刊名称】《装备制造技术》【年(卷),期】2017(000)007【总页数】3页(P5-7)【关键词】齿轮刚度;时变啮合刚度;啮合力【作者】彭伟;倪利勇;于楚泓【作者单位】电子科技大学中山学院,广东中山528400;电子科技大学中山学院,广东中山528400;电子科技大学中山学院,广东中山528400【正文语种】中文【中图分类】TH132.41齿轮传动由于具有传动效率高、传动准确、结构紧凑等特点,因此成为机械传动中应用最广泛的传动方式之一。
随着齿轮传动向高速、重载、大型化方向发展,对齿轮的传递运动准确性、平稳性、载荷分布的均匀性等提出了更高要求。
由于齿轮加工和装配等形成齿侧间隙、齿轮误差和时变刚度等非线性因素的存在,在齿轮传动过程中对齿轮传动机构运行的平稳性造成很大影响,从而产生非线性振动、噪声等现象[1-3]。
因此,齿轮传动机构的动力学特性分析显得尤为重要。
本文以某型300 kW矿用挖掘机提升机构减速器两级齿轮传动系统为研究对象,从时变啮合刚度入手分析了齿轮传动中动态啮合力,为齿轮传动系统实现减振降噪提出可行的优化措施[4-5]。
该矿用挖掘机提升机构减速器由两级齿轮传动构成,其中第一级为斜齿轮传动,第二级为直齿轮传动。
该齿轮传动系统动力学模型如图1所示,其主要设计参数如表1所示。
在齿轮啮合过程中,每对轮齿的啮合位置是不断发生变化的。
以本文的传动机构为例,第一级斜齿轮的齿轮副从轮齿开始啮入到啮出,其变化规律是从一点开始以逐渐增加的接触线方式啮合,最后以相反的变化退出啮合。
从啮合的整个过程中可以看出其啮合刚度在不断产生变化[6]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
齿轮啮合刚度单位
齿轮啮合刚度是指两个啮合齿轮在受到外力作用时的抵抗变形的能力。
它是衡量齿轮传动系统刚性的重要参数。
齿轮啮合刚度的单位是牛/米(N/m)。
齿轮啮合刚度主要受到齿轮的材料、几何形状、齿数等因素的影响。
一般来说,齿轮的材料越硬、强度越高,其啮合刚度也会相应增加。
同时,齿轮的几何形状也会对啮合刚度产生影响。
例如,齿轮的模数越小,齿高越大,齿根越厚,其啮合刚度也会相应增加。
此外,齿数的增加也会提高齿轮的啮合刚度。
齿轮啮合刚度的大小直接影响着齿轮传动系统的工作性能。
高啮合刚度可以减小齿轮传动系统的变形和弯曲,提高传动精度和传动效率。
而低啮合刚度会导致齿轮传动系统的变形增加,从而降低传动精度和传动效率。
在实际应用中,为了提高齿轮传动系统的工作性能,可以采取一些措施来增加齿轮的啮合刚度。
例如,选择高强度的齿轮材料,优化齿轮的几何形状,增加齿数等。
此外,还可以通过增加齿轮的宽度、增加轴承支撑等方式来提高齿轮传动系统的刚度。
齿轮啮合刚度是衡量齿轮传动系统刚性的重要参数,直接影响着传动精度和传动效率。
通过合理设计和优化,可以提高齿轮的啮合刚度,从而提高齿轮传动系统的工作性能。