Estimating the Pen Trajectories of Multi-Path Static Scripts Using Hidden Markov Models
基于贝叶斯Noisy-or Gate网络对潜艇航行隐蔽性评估
基于贝叶斯Noisy-or Gate网络对潜艇航行隐蔽性评估张驰;唐帅【摘要】针对影响潜艇航行隐蔽性的部分典型因素特点,提出了基于贝叶斯Noisy-or Gate网络对潜艇航行隐蔽性评估的一种概率计算方法和网络模型,该贝叶斯网络利用专家知识分别从潜艇航行过程中的内因和外因分析,确定了主要风险因素,构造出有效的网络结构.对于没有考虑到的其他未知的因素,也会综合为一类因素加入网络中.采用满足Noisy-or Gate模型构造的网络节点参数,能使条件概率的个数减少,计算压力会大幅度地降低.在得不到充足样本数据时,该方法可以简化知识获取,还具有网络节点更新快速,实时性高的特点,可为潜艇隐蔽性航行提供定量评估依据,提高指挥员的决策效率.【期刊名称】《指挥控制与仿真》【年(卷),期】2019(041)002【总页数】6页(P75-80)【关键词】贝叶斯网络;Noisy-or Gate模型;潜艇隐蔽性;评估;概率计算方法【作者】张驰;唐帅【作者单位】海军潜艇学院,山东青岛266199;海军潜艇学院,山东青岛266199【正文语种】中文【中图分类】U674.76;E917潜艇航行的隐蔽性是衡量潜艇航行安全的重要考量之一,特别是在长时间远距离航行的情况下,关键环节较多,需要考虑的因素也很多,有多种因素决定着潜艇是否隐蔽安全。
指挥员通常是根据本艇态势,搜集的情报信息加上个人经验去推测潜艇航行时的安全程度,但是没有相关辅助手段去定量支撑指挥员的推断。
根据周围因素判断潜艇隐蔽性评估用到的信息是在有限、不完整的信息背景下进行的,贝叶斯网络具有在不确定推理问题中进行学习和推理的能力,可以很好地将先验知识和多源数据融合进行推理。
贝叶斯网络的快速推理功能,已成为人工智能中解决不确定性推理的重要研究方向,也成为不同行业中数据分析、故障诊断、目标识别的一种有效工具[1]。
Pearl将贝叶斯推理进行网络化表达以来,提出的一些算法对不确定性问题进行很好的解决。
基于IMM-MHT算法的杂波环境多机动目标跟踪
基于IMM-MHT算法的杂波环境多机动目标跟踪邵俊伟;同伟;单奇【摘要】针对杂波环境下多机动目标的跟踪问题,提出将交互多模型(IMM)算法与多假设跟踪(MHT)算法结合,并运用Murty算法和假设树修剪方法进行假设生成和假设管理,提高IMM-MHT算法的实用性.仿真结果表明,IMM-MHT算法具有较高的正确关联率和较好的跟踪稳定性,且与只使用单模型的MHT算法相比,具有更好的跟踪精度.【期刊名称】《舰船电子对抗》【年(卷),期】2014(037)002【总页数】5页(P87-90,93)【关键词】数据关联;多假设跟踪;交互多模型【作者】邵俊伟;同伟;单奇【作者单位】中国电子科技集团公司第38研究所,合肥230088;陆军驻中电集团38所军事代表室,合肥230088;中国电子科技集团公司第38研究所,合肥230088【正文语种】中文【中图分类】TP957.510 引言随着战场环境的日趋复杂以及目标机动性能的日益提升,如何在杂波环境下跟踪机动目标正成为雷达数据处理系统要应对的关键问题之一。
传统数据关联算法,如最近邻[1](NN)、概率数据关联[2](PDA)、联合概率数据关联[3](JPDA)等,以当前扫描周期内的量测为基础进行数据关联,若某一扫描周期内的关联结果与真实情况有较大差别,则之后的跟踪过程常会发生错误,甚至丢失目标。
多假设跟踪[4](MHT)的关联结果不仅取决于当前扫描周期内的量测数据,而且还与历史量测信息有关。
对不能确定的关联,会形成多种逻辑假设,并用后续的量测数据来解决这种不确定性。
在理想条件下,MHT是最优的数据关联算法,可以有效地解决杂波环境下的数据关联问题。
但是,MHT算法所需的计算和存储资源会随着量测数和跟踪步数的增长呈指数增加,若要实际应用,还需要有效的假设管理技术。
对机动目标,以单一的运动模型来刻画其运动过程,往往和实际情况有偏差,最终会由于模型失配导致跟踪误差增大甚至跟踪失败。
基于ResNet-LSTM的多类型伪装语音检测

(7)
ht = ot ⊗ tanh(ct )
(8)
其中 U1,W1,b1 为线性关系的系数和偏置,σ 为 Sigmoid
激活函数,⊗为 Hadamard 积(对应位置相乘)。
2.3 ResNet-LSTM 网络
本文提出的 ResNet-LSTM 结构如表 1 所示。网络由
xt
xt
Input Gate it
(3)关于语音变形 (Voice Transformation, VT) 的
方法。
研究,大多利用如频谱图、修改群延迟(MGD)和梅尔普
1 伪装语音检测研究现状
倒谱系数(MFCC)作为特征再利用支持向量机(SVM)、
近年来,自动说话人验证(Automatic Speech Verification, ASV)系统这种低成本的生物识别技术已被广泛地应用
Output Gate Ot
Cell
xt
CtLeabharlann htft Forget Gate
xt
图 4 LSTM 记忆单元结构图 Fig.4 LSTM memory unit structure diagram
13 Copyright©博看网. All Rights Reserved.
第 41 卷
数字技术与应用
现有的关于伪装语音检测的研究主要集中在三种不 判断结果。实验结果表明,该方法在多种类型的伪装语
同的伪装类型 :
音检测上都有超过 90% 的识别精度,能应对各种不同时
(1)语音转换(Voice Conversion, VC)和语音合 长及不同类型的伪装语音攻击。
成(Speech Synthesis, SS)方面 :F. Hassan 等人提出 2 多类型伪装语音检测系统
review_material11_12
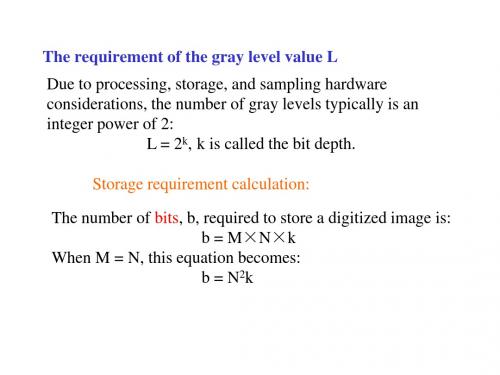
Illustration of histogram equalization
No. of pixels
2 4 3 2
3 2 2 4
3 4 3 2
2 3 5 4
6 5 4 3
2
1
4x4 image Gray scale = [0,9]
Gray level
0 1 2 3 4 5 6 7 8 9
histogram
4-component
4-component
Different ways of measuring distance
1. The Euclidean distance between p and q is defined 1 as: 2 2 2
De ( p, q) [( x s) ( y t ) ]
1 F (u, v) MN
M 1 x 0
M 1 N 1 x 0 y 0
f ( x, y) e
f ( x, y)e
j 2vy/N
j 2 ( ux/M vy/N )
can be expressed in the separable form
1 F (u, v) M
1 0
255=>11111111 235=>11101011 188=>10111100 155=>10011011
0
1
0 1
124=>01111100 90 =>01011010
……
Moving window example: find the minimum
Padded image Original image
Storage requirement calculation:
多目标跟踪中的航迹起始算法

多目标跟踪中的航迹起始算法作者:马琳琳来源:《中国新通信》 2018年第16期马琳琳沈阳理工大学【摘要】在多目标跟踪中,正确的航迹起始可以防止目标的误跟与目标丢失还可以减少多目标跟踪中组合爆炸所带来的计算负担。
首先选择椭圆波门作为相关波门,并提出了一种新的航迹起始算法,通过仿真,验证了该算法适用于不同的目标跟踪运动模型,且虚假航迹起始的概率也明显降低。
【关键词】多目标跟踪航迹起始相关波门一、概述航迹起始是雷达目标跟踪的第一步,是指在目标跟过程中未进入稳定踪前的航迹确定的过程。
航迹起始主要包括:相关波门的确立、航迹初始化和航迹确定,最终建立准确可靠的航迹。
航迹起始就是用雷达扫描周期内观测到的数据来进行点与点的数据关联,从而形成暂时的航迹,是滤波、报告航迹起始、数据互联与轨迹融合的基础,因此准确的航迹起始是轨迹融合的关键技术。
航迹起始算法包括:顺序处理技术和批处理技术。
顺序处理技术的主要算法有:直观法和逻辑法,它们的计算量小并且执行效率高,但是在密集的杂波环境下算法的准确度明显下降,因此一般适用于杂波数量较少的环境中。
批处理技术的主要算法有:Hough 变换法和修正的Hough 变换法,虽然计算量较大,但是在密集杂波的情况下,它们的性能明显优于顺序处理技术的算法。
二、相关波门相关波门是用来判断雷达接收到的回波是否来自于目标的决策门限,以跟踪目标的预测位置作为中心,从而确定该目标在下一时刻回波可能出现的范围的一块区域。
相关波门的大小主要依赖于:预测误差、雷达量测误差、目标运动特性、坐标系的选择和天线扫描周期等。
常用的相关波门有 : 环形波门、椭圆波门、矩形波门和扇形波门。
环形波门为航迹起始的初始波门,作为初始波门它的面积较大导致它的测量精度相比于其它相关波门低。
椭圆波门和矩形波门是直角坐标系下的相关波门,扇形波门是极坐标系下的相关波门。
因此为了精度高的航迹起始与计算方便,相关波门选择椭圆波门。
三、航迹起始算法假设在多目标跟踪中,有些雷达已经得到了目标跟踪信息,第 k a 时刻对目标的状态估计值为akx?,在第 k a 时刻对目标的状态估计协方差矩阵为a a kP k。
交互作用和二次效应结构方程

SEM of Latent Interaction and Quadratic Effects潜变量交互作用和二次效应结构方程Herbert W. MarshOxford UniversityZhonglin WenSouth China Normal UniversityHong Kong Examinations AuthorityKit-Tai HauThe Chinese University of Hong Kong AERA Extended Course ◦San Francisco ◦April 7 & 8, 2006 ◦Structural Equation Modeling: A Second CourseLatent Interaction --Marsh, Wen, Hau 2Latent Interaction --提要传统方法显变量(方差分析,回归分析)潜变量(因子得分, 2SLS, 多组SEM)约束方法的演变约束方法、部分约束方法和无约束方法非正态分布:方法的稳健性乘积指标的类型二次效应其他方法(如QML,2SMM)总结Latent Interaction --交互作用例子教育心理:教学方法与学生个性对教学效果发展心理:年龄与某个给定的变量对因变量期望值理论:期望与价值对动机自我概念:自我概念分量与对该分量的重视程度对整体自尊Latent Interaction --二次效应二次效应的例子作业量增加,学业成绩提高,但到达一定作业量后反而降低开始时,压力的增加会提高成绩,但压力太大成绩反而下降低水平上的焦虑有利于表现,但高水平的焦虑却相反自我概念随儿童年龄而降低,少年时期最低,青年初期有所提高先降后升,二次效应是非线性效应最简单的例子强大的二次效应会给人有交互效应的错觉Latent Interaction --交互效应传统分析方法显变量的交互效应分析方法,(X 1, X 2) 对结果(Y )当X 1, X 2是类别变量,方差分析(ANOVA )当X 1, X 2是连续变量,回归分析当X 2类别变量, X 1是连续变量, 对X 2的不同类别,做Y 对X 1的回归分析,比较回归系数。
基于改进DeepLabV3+的引导式道路提取方法及在震源点位优化中的应用
2024年3月第39卷第2期西安石油大学学报(自然科学版)JournalofXi’anShiyouUniversity(NaturalScienceEdition)Mar.2024Vol.39No.2收稿日期:2023 06 03基金项目:国家自然科学基金面上项目“基于频变信息的流体识别及流体可动性预测”(41774142);四川省重点研发项目“工业互联网安全与智能管理平台关键技术研究与应用”(2023YFG0112);四川省自然科学基金资助项目“基于超分辨感知方法的密集神经图像分割”(2022NSFSC0964)第一作者:曹凯奇(1998 ),男,硕士,研究方向:遥感图像标注。
E mail:819088338@qq.com通讯作者:文武(1979 ),男,博士,研究方向:人工智能在地球科学的应用、高性能计算。
E mail:wenwu@cuit.edu.cnDOI:10.3969/j.issn.1673 064X.2024.02.016中图分类号:TE19文章编号:1673 064X(2024)02 0128 15文献标识码:A基于改进DeepLabV3+的引导式道路提取方法及在震源点位优化中的应用曹凯奇1,张凌浩2,徐虹1,吴蔚3,文武1,周航1(1.成都信息工程大学计算机学院,四川成都610225;2.国网四川省电力公司电力科学研究院,四川成都610094;3.中国石油集团东方地球物理勘探有限责任公司采集技术中心,河北涿州072750)摘要:为解决自动识别方法在道路提取时存在漏提、错提现象,提出一种引导式道路提取方法提高修正效率。
在DeepLabV3+原有输入通道(3通道)的基础上添加额外输入通道(第4通道),将道路的4个极点转化为二维高斯热图后作为额外通道输入网络,网络以极点作为引导信号,使网络适用于引导式道路提取任务;设计并行多分支模块,提取上下文信息,增强网络特征提取能力;融合类均衡二值交叉熵和骰子系数组成新的复合损失函数进行训练缓解正负样本不均衡问题。
多假设跟踪算法
多假设跟踪算法
多假设跟踪算法(Multi-Hypothesis Tracking,MHT)是一种用于目
标跟踪的算法,核心思想是在对目标进行跟踪时同时考虑多种可能性。
它
的理论基础是贝叶斯估计和最优化理论,可以处理目标出现、消失、重合、遮挡等复杂情况,其主要流程如下:
1.初始化:给定目标的初始位置和大小,建立跟踪模型,即目标的状
态以及其在之后的状态中所具有的不确定性。
2.预测:根据上一帧的目标状态和运动信息,预测目标在当前帧的位
置和状态,并生成多个候选估计。
3.测量更新:利用当前帧的传感器信息(如图像、雷达等)对多个估
计进行更新和筛选,确定最有可能的目标状态。
4.轨迹假设:由于目标可能出现和消失,实际应用中目标轨迹可能存
在多条假设,需要在跟踪中对多个假设进行维护和推理。
5.选择最优轨迹:根据给定的目标跟踪指标(如跟踪误差、轨迹长度等)选择最优的目标轨迹,同时可以根据跟踪状态的不确定性确定目标的
可信度水平。
总的来说,多假设跟踪算法是一种高鲁棒性的目标跟踪算法,适用于
复杂场景下的目标跟踪问题。
工具变量法
Z 'y Z ' X Z ' ε Z ' X plim = plim β + plim = plim β n n n n
= ε − X (Z ' X) Z 'ε
−1
s2 =
e 'e n
−1 −1 −1
ε 'ε ε ' Z X ' Z X ' X Z ' X Z 'ε ε ' X Z ' X Z 'ε = + − 2 n n n n n n n n n
这里假定 Z 和 X 的变量数相同,因此 Z ' X 是方阵,由于假定其秩为 K,所以 Z ' X 也是满 秩的,则
Z ' X Z 'y plim n plim n = β
因此推出 IV 估计量为
-1
b IV = ( Z ' X ) Z ' y
ቤተ መጻሕፍቲ ባይዱ
∑e = ∑( y − b e )
2 i i 1 b2 xi
2
3. Hausman’s Specification Test 这实际上就是基于 OLS 和 IV 来检验解释变量的严格外生性假定。 零假设:解释变量与干扰项不相关。或
H 0 : plim (1/ n ) X ' ε = 0 。
通 过 (1/ n ) X ' e 考 察 X 和 ε 的 协 方 差 是 没 有 结 果 的 , 因 为 正 规 方 程 组 总 是 生 成
基于相机雷达融合的改进GM-PHD多目标跟踪算法
法,利用低成本的毫米波雷达与图像完成行人的检测与跟
踪。文献[8]提出贯序多传感器 GMPHD融合算法,即在
融合周期依次用多个传感器数据更新高斯项。
在上述研究基础上,本文提出了一种基于相机和雷达
融合的 GMPHD算法。综合相机和雷达的检测特性,将相
机检测的目标数量作为先验,判定目标存活以及新生目标
density,PHD)滤波算法成为热点,PHD算法对量测与目标 数目和状态的随机性进行同一建模,不再将数据关联结果 作为状态滤波的前置条件,在一定程度上避免了数据关联 的复杂性问题[4]。
标准高斯混合 PHD(GMPHD)算法为常见的 PHD算 法[5],其 景 中 目标检测和存活概率往往受环境影响变化,未知目标探测 概率的使用严重影响了滤波器性能。此文献[6]提出了基 于时变卡尔曼滤波的 PHD算法,在更新步骤前对目标集合 和量测集合进行预关联,避免使用未知的检测概率,同时减 少无关量测对跟踪效果的影响。由于单一传感器量测的准
Abstract:Aimingattheproblemofdegenerativeperformanceofsinglesensortrackingmethodundercomplicated environmentandtheunknowndetectionprobability,animprovedGaussianmixtureprobabilityhypothesisdensity (GMPHD)multitargettracking algorithm based on camera and radarfusion isproposed.Through pre association,thetargetsetisdividedintobothcameraandradarmatchedtargets,onlycameramatchedtargets, onlyradarmatchedtargetsandnonmatchedtargets.Accordingtothatdifferentdegreesofconfidenceareapplied toupdatetargetstates.Integratingthedistancemeasuredbyradarandtheazimuthanglemeasuredbycamera,the positionestimationoftargetismoreaccurate.Takingcamerameasurementsasaprioricondition,themergingand pruningprocessissimplifiedandimproved.Simulationresultsindicatethattheproposedalgorithm ismore accurateandrobust. Keywords:multitargettracking;multisensorfusion;Gaussianmixtureprobabilityhypothesisdensity(GM PHD)filter;matchinganddivision