一种改进的加权三边定位算法
三d定位方案

三d定位方案三D定位方案引言三维定位是指通过利用传感器和算法,将目标物体在三维空间中准确地定位的技术。
它在许多领域中被广泛应用,如机器人导航、增强现实、虚拟现实等。
本文将介绍几种常见的三维定位方案,包括基于视觉的方法、基于无线信号的方法以及基于惯性传感器的方法。
基于视觉的三维定位基于视觉的三维定位是最常见和直观的方法之一。
它通过利用摄像头或其他视觉传感器获取目标物体的图像或视频,并通过计算机视觉算法分析和处理数据,从而实现对目标物体在三维空间中的定位。
这种方法的优点是成本相对较低,设备易于获取,且精度高。
常用的计算机视觉算法包括特征点匹配、结构光扫描和立体视觉等。
特征点匹配特征点匹配是一种常见的三维定位方法,它通过在目标物体上检测并匹配出一些关键特征点,然后利用这些特征点在相机坐标系和目标坐标系之间建立映射关系,从而实现对目标物体的定位。
这种方法的优势在于对目标物体的要求比较低,不需要任何标记或特殊设备,但在复杂背景下,特征点识别和匹配的精度可能会受到影响。
结构光扫描结构光扫描是一种利用一台或多台摄像头和激光投影仪进行三维定位的方法。
它通过投射特殊的纹理或光线模式到目标物体上,再根据摄像头捕获的图像和激光投影仪发射的光线,计算出目标物体在空间中的位置。
结构光扫描具有高精度和稳定性的优点,但设备成本相对较高。
立体视觉立体视觉是利用两个或多个摄像头对目标物体进行观测和分析的方法。
通过获取多视角的图像或视频,并进行图像处理和计算几何学变换,可以得到目标物体在三维空间中的位置和姿态。
立体视觉在机器人导航和增强现实等领域中被广泛应用,但由于需要使用多个摄像头,设备成本和复杂度较高。
基于无线信号的三维定位基于无线信号的三维定位是利用无线信号的传播特性对目标物体进行定位的方法。
它通过测量接收到的无线信号的信号强度、到达时间或多径效应等参数,利用数学模型计算并推断目标物体在三维空间中的位置。
常见的基于无线信号的三维定位技术包括无线电频率辐射(RFID)、蓝牙定位和超宽带定位等。
WiFi技术的人员定位安全系统
• 144•随着人们的安全意识不断提升,工厂作业时对人员的安全工作变得愈发的重要。
而靠人力去监督员工们的安全,在高开销的同时,即存在不可靠性,也不能实现对每个员工实时的进行监控。
因此急需要一套电子系统来对人员位置的实时监测并发出警告。
同时也在WiFi 技术不断提升,WiFi 使用不断普及,其精度、覆盖范围等性能不断提升的情况下,我们选择了基于WiFi 技术的人员定位安全系统。
该系统主要利用与WiFi 连接的智能手机进行定位,在客户端上有可导入修改的工厂3D 模型,通过定位的人员也会反映在模型上,管理员能只管检测到员工的位置。
当施工人员被定位到危险区时,系统会自动报警,提醒人员远离危险区。
1 WiFi定位方案整个人员定位安全系统是在WiFi 环境下进行的,每个人员都需要携带一部智能手机与WiFi 相连接。
无线局域网(WLAN ,又称WiFi )WiFi 是一种短程无线网络传输技术,具有覆盖范围广、传输速度快、危害小、成本低、容易搭建和管理等优点。
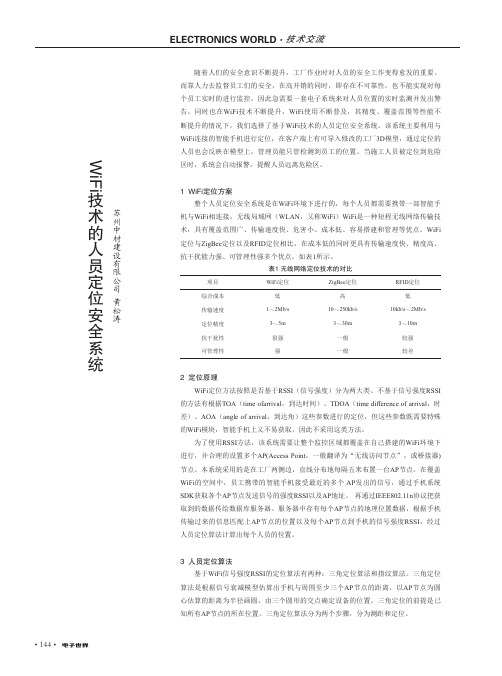
WiFi 定位与ZigBee 定位以及RFID 定位相比,在成本低的同时更具有传输速度快、精度高、抗干扰能力强、可管理性强多个优点,如表1所示。
表1 无线网络定位技术的对比项目WiFi 定位ZigBee 定位RFID 定位综合成本低高低传输速度1~2Mb/s 10~250kb/s 10kb/s ~2Mb/s 定位精度3~5m 3~30m 3~10m 抗干扰性很强一般较强可管理性强一般较差2 定位原理WiFi 定位方法按照是否基于RSSI (信号强度)分为两大类。
不基于信号强度RSSI 的方法有根据TOA (time ofarrival ,到达时间)、TDOA (time difference of arrival ,时差)、AOA (angle of arrival ,到达角)这些参数进行的定位,但这些参数既需要特殊的WiFi 模块,智能手机上又不易获取,因此不采用这类方法。
一种改进的基于TDOA的三维多点定位技术

参考文献:
[1]马芝,云计算在IC设计中的应用,电子产品世界, (2011.8),P32-33,45
[2]云计算技术发展及应用探讨[R/OL].(2010-6-10) ,http://www.
作者简介:徐君怡(1978-),男,浙江嘉兴人,本科,北京工商 大学,信息主管,助理工程师,苏州华芯微电子股份有限公司,研究方 向:计算机应用及网络
[1] 吕小平, MDS技术在我国民用航空的应用探讨[J].空中交通管理, 2006, 23(9): 4-11
[2] 王洪, 刘昌忠等. 一种多点定位的目标位置精确解算方法. 航空 学报, 2011, Vol.32 No.7 1269-1274.
[3] 易云清, 徐汉林. 时差定位模型与定位精度分析. 电子对抗技术. 2010(3): 0016-05
仿真2:在保证改进的“矩阵伪逆-泰勒展开”的GDOP误差小于 “泰勒展开”的GDOP误差的情况下,对两种算法的迭代次数随着收 敛门限 的变化规律进行仿真。对于每一个点每次仿真运行3000次,并 求平均的迭代次数。运行的结果如图3所示,相比于“泰勒展开”, “矩阵伪逆-泰勒展开”在迭代次数的减少上取得了不错的性能提 高。因为泰勒展开的初始点并不是随机的,而是一个接近目标位置的
166
[7] Chan Y T, Ho L C. A simple and efficient estimator for hyperbolic location[J]. IEEE Transaction on Signal Processing, 1994, 42(8): 1905-1915.
三点定位原理

三点定位原理三点定位原理是一种在导航和定位领域广泛应用的定位技术。
它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置,从而实现精准定位。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域。
下面将详细介绍三点定位原理的工作原理、应用场景和未来发展方向。
三点定位原理的工作原理是基于三角测量原理的。
当接收器与至少三颗卫星之间的距离确定后,就可以得出接收器所在的位置。
这是因为,三个点确定一个平面,因此通过三个卫星的距离可以确定接收器所在的平面位置。
而接收器与卫星的距离可以通过卫星发射的信号与接收器接收的信号之间的时间差来计算。
通过精确测量这些时间差,就可以确定接收器的位置。
这种原理在实际应用中被广泛使用,因为它可以实现高精度的定位。
三点定位原理在现代导航和定位技术中有着广泛的应用。
其中最典型的应用就是GPS导航系统。
通过接收卫星发射的信号,GPS接收器可以计算出自己的位置,并在地图上显示出来。
这种技术已经被广泛应用于汽车导航、航空导航、船舶导航等领域。
此外,三点定位原理还被应用于地图定位、无人机导航等领域。
可以说,三点定位原理已经成为现代导航和定位技术的基础。
未来,随着技术的不断发展,三点定位原理也将得到进一步的完善和应用。
例如,通过增加卫星数量和改进信号处理算法,可以提高定位的精度和稳定性。
另外,结合人工智能和大数据技术,可以实现更加智能化的定位系统,为用户提供更加个性化的定位服务。
同时,三点定位原理还可以应用于更多的领域,如智能交通、智能城市等,为人们的生活带来更多的便利。
总的来说,三点定位原理是一种在导航和定位领域广泛应用的定位技术,它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域,并且在未来有着更广阔的发展空间。
相信随着技术的不断进步,三点定位原理将会为人们的生活带来更多的便利和惊喜。
井下巷道TOA和TDOA联合估计的UWB定位算法

第41卷第05期 2022年 05月煤炭技术
Coal TechnologyV〇1.41 N〇.05
May. 2022
doi:10.13301/j.cnki.ct.2022.05.041
井下巷道TOA和TDOA联合估计的UWB定位算法乔欣,孔兵(巢湖学院电子工程学院,安徽巢湖238000)摘要:设计了一种基于T0A和TDOA联合估计的UWB定位算法。分析了 UWB信号在巷
道环境下的传播机制、T0A与TD0A定位模型,对于井下采用T0A三边定位法的测量误差使3个 圆不能相交于1点的情况,提出将相交区域的质心作为估计坐标,结合TD0A的参数与Taylor算 法,将T0A的估计坐标作为Taylor算法的初始值,对定位结果求精。仿真实验表明,定位算法具有 精度高、计算量小等优点,具有良好的应用推广价值。关键词:井下巷道;UWB定位算法;TOA; TDOA; Taylor算法
中图分类号:TD76 文献标志码:A 文章编号:1008 - 8725(2022)05 - 168 -04UWB Positioning Algorithm Based on Joint TOA and TDOA Estimationin Downhole RoadwayQIAO Xin, KONG Bing(School of Electronic Engineering, Chaohu University, Chaohu 238000, China)Abstract: A UWB location algorithm based on the joint estimation of TOA (Time of Arrival) and TDOA (Time Different of Arrival) is designed. The UWB (Ultra Wide Band) signal propagation mechanism under the roadway environment, TOA and TDOA positioning model are analyzed, for downhole measurement error using TOA trilateral positioning method can not make three circles intersect at a point in case,
基于DV—Hop的修正和改进定位算法

D Ho lo t m s a ay e n me d n e a c o o e s c lu ain o e a e a e d s n e o a h h p V- p ag r h i n l z d a d a n i g t n h rn d ’ ac l t ft v r g i a c fe c o . i h o h t Mo e a c o o e i l w d t a t ia e i h n lp s in c c lt n a d t e w ih e e t i g r h i r n h r n d sa o e o p r cp t n t ef a o i o a ua i n h eg td c n r d a o i m s l i i t l o o l t
L] h n I aj ,S N Y nfi t Z e ,L .e U a — ,WA G S uca Y i e N h —h
( c o l f l ti l n n r l n i e r g l o ig T c nc l n v ri , ld o 1 5 0 , hn ) S h o o e r a d Co t gn ei , a n n eh i ie s y Hu u a 2 1 5 C ia E c c a o E n i aU t
21 00年 第 2 9卷 第 8期
传 感 器 与 微 系统 ( rnd cr n coyt eh o g s Ta su e a dMi ss m T cnl i ) r e oe
3 1பைடு நூலகம்
基 于 D Ho V— p的修 正 和 改进 定 位 算 法
吕 振 ,李亚 杰 ,孙延 飞 ,王 书茶
离无关的定位算法 。该算法 无需任何 的额外 硬件 支持 、 算 法简单 , 以, 所 比较适合 用做 无线传感 器的定位 。其基本 过 程就是将未知节点到锚 节点之间的距 离用网络 中节 点平 均
一种基于概率模型的改进Scout无线定位算法

在每 次定 位算 法执 行 的过程 中 , 通过 更新 传输 损耗 和路 径损 耗进 行 校 正 . 在 算 法 执 行 的过 程 中 R S S I 与各 个参 数 的关 系如下 .
R S S I— P( ) 一 a一 1 0 n l o g d— N ( 0 , 、 ) , ( 1 )
一
种 基 于 概 率 模 型 的改 进 S c o u t 算法 , 在 保 证 定 位 精 度 的情 况 下将 定 位 节 点 数 减 少 了一 半 , 大 大 降
低 了 定 位 系 统 的硬 件 成 本 .
关键 词 : 概率模 型 ; S c o u t ; 定 位 ;参 考 标 签
中图分类号 : TN9 2 9 . 5 文献标识码 : A
要求 . 常用 的测 距 技 术 有 R S S I 、 T O A、 T D O A 和
S c o u t 算法基 于 R S S I 对 跟踪 目标 进行 定位 . 在
算法 执行过 程 中 , 借 助 分 布于 现场 的参 考 标 签对 各
传输 参数进行 实 时修 正 , 利 用一 个 概率 模 型来 描 述
看 作为一种粗 略的测距技术, 如 何 能够 提 高 基 于
R S S I 的定 位 精 度 是 一 个 比 Байду номын сангаас 有 意 义 的 问 题 .目前 ,
传送 给 服务器 进 行处理 , 参 考标 签用 于校 正参 数.
该算 法是 通过 利用 已知 的参 考标 签参 与校 正 ,
应 用于室 内无线定位 的算 法有很 多 , 比如 : 基于 R S — s I 差 分修正 的加 权质 心定 位算 法_ 5 ] , 基 于 RS S I 测距 的差 分修正定 位算法 l _ 6 ] , 基于 R S S I 的三角形 质心 定 位算 法_ 7 ] , 基于 R S S I 的无 线传感器 网络距 离修正定 位算 法[ 8 等, 文献 [ 9 ] 提 出了 一种 基 于概 率 模 型 的
一种改进的三帧差分运动目标检测算法

一种改进的三帧差分运动目标检测算法三帧差分是一种常见的运动目标检测算法,它通过比较当前帧与前一帧、前一帧与前两帧之间的差异来判断目标的运动状态。
然而,传统的三帧差分算法存在着一些问题,如对于光照变化、背景噪音等较为敏感,同时在目标与背景颜色相似的情况下容易产生误检。
为了解决这些问题,我们提出了一种改进的三帧差分运动目标检测算法。
该算法主要包括以下几个步骤:1.彩色图像转灰度图像:将当前帧、前一帧和前两帧分别转换为灰度图像。
2.图像预处理:对每一帧的灰度图像进行高斯平滑处理,降低图像噪音的影响。
3.前景提取:将当前帧与前一帧进行差分,并设置一个阈值进行二值化,得到当前帧的前景图像。
4.背景更新:将前一个前景图像与当前帧的前景图像进行逻辑与运算,得到一个更新后的背景图像,用于下一帧的背景差分。
5.运动目标检测:对当前帧的前景图像进行形态学运算,主要包括膨胀和腐蚀,以填补小的空洞和消除噪音。
6.目标位置定位:根据前一帧的目标位置和当前帧的前景图像,利用轮廓检测算法得到目标的边界矩形框。
7.目标跟踪与识别:根据目标的边界框,将目标框内的区域提取出来,进行进一步的目标跟踪和识别。
通过对以上步骤进行改进,我们可以减少背景噪音的影响,提高目标检测的精度和稳定性。
具体的改进点如下:1.自适应阈值选取:传统的三帧差分算法使用固定的阈值进行二值化处理,容易受到光照变化和背景噪音的干扰。
我们采用自适应阈值选取方法,基于当前帧的灰度直方图,动态计算合适的阈值,提高算法对光照变化和背景噪音的适应能力。
2.动态背景更新:传统的三帧差分算法只更新前一帧的背景图像,可能导致长时间的目标停留造成背景的更新不及时。
我们采用动态背景更新的方法,将当前帧的前景图像与前两帧的背景图像进行逻辑与运算,得到一个更准确的背景图像。
这样可以更好地适应目标运动速度的变化。
3.目标定位优化:传统的三帧差分算法通过简单的轮廓检测方法得到目标的边界框,容易受到背景噪音和目标形状变化的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要 : 对 三边 定位 算 法定位 精度 不 高 的问题 , 出了一种 改进 的加权 三边 定位 算 法. 算法在 参 考 针 提 该
节点呈 正 三角形 摆放 时定 位精 度 最 高的理论 基 础上 , 参考 节点 所 围成 的 三角形 的 内角和 边长 信 息 将
作 为加 权 因子 , 引入 到三 边 定位算 法 中 , 以此 来反 映 该三 角形 与正 三 角形之 间的 差异 . 真 实验 结果 仿
0 引 言
在无 线传 感 器 网络 中 , 传感 器 节 点 的位 置 是 至 关 重 要 的. 医疗 护 理 、 境 监 测 、 井 人 员 定 位 等 在 环 矿 领 域 中 , 线传 感 器 网络 的 应用 更 加 需 要 知 道 传感 无
器 节 点准 确 的位 置信 息. 目前 , 二 维定 位 中 , 边 在 三 测 量 是常 用 的定 位 方 法 . 由几 何 学 常 识 可 知 , 果 如 3个 参考 节 点 不 在 同一 直 线 上 , 由未 知 节 点 与参 则 考 节 点 的距 离 , 可 唯 一 确 定 未 知 节 点 的 位 置 . 便 然
a l s a d si e l n t n o main o h ra g e s ro n e e e d st rl tr to o aiai n a - nge n ld e gh i f r to ft e tin l u r u d d by r frno e o tia e ain lc lz to l
V0. 7 No 3 12 .
21 0 2年 6月
Jn 2 1 u . 02
文章 编 号 :0 4—17 ( 0 2 0 0 8 0 10 4 8 2 1 ) 3— 0 3— 3
一
种 改进 的 加 权 三 边 定 位 算 法
吴文健 , 刘瑾 , 李贺林 , 孔兵
( 南大 学 计算机 与信息 工程 学 院 ,河南 开封 4 50 ) 河 70 1
可能 准确地 交 于一 点 … , 即不 可能 准 确 地 求得 未 知 节 点 的位 置 , 图 1 示 . 如 所
Abs r c : mi g a h r b e t a rl tr to o a ia in meho a O lC lz to r c so a m - t a t Ai n tt e p o l m h tti e ain l c l to t d h s lW O aiai n p e iin, n i a z
Ke r s: r l s e s rnewo k;rlt r to o aia in; ih e a t r t a g e c n r i y wo d wiee s s n o t r tiae a in lc l t z o weg t d f co ;r n l e to d i
证 明 , 改进 算 法提 高 了定位 的精度 . 该 关键 词 : 线传 感 器 网络 ; 无 三边 定位 ; 权 因子 ; 角形质 心 加 三
中 图分 类号 :P 9 T 33 文献 标 志码 : A
An m pr v d weg e rl tr to l c lz to l o ihm i o e iht d t ia e a in o aia i n ag rt
第2 7卷
第 3期
郑 州 轻 工 业 学 院 学 报 (自 然 科 学 版 )
JU N L FZ E G H UU IE S YO IH D SR ( a r c ne O R A H N Z O NV R I F G T N U T Y Nt aSi c) O T L I ul e
WU We -a , L U J , L el , K N ig nj n i I i n I —n O G Bn H i
( ol e 厂 o p adI o. n .H a nv, a g4 50 ,hn ) C lg C m . n frE g , e nU i K n 7 0 1 C i e 0 n n . a
c n g r t n o ee o e a e d t h ih s o aia in p e i o t i ag r h b n st e i tro o f u a i f f rn d sc n l a o t e h g e tlc l t r c s n,h s lo t m r g h n e r i o r z o i i i i
g r h a e g t d f co e e t h i e e c e w e i t a g ea d e u lt rlt a g e E p rme t o i m sw ih e a trt r f c e df r n e b t e n t s r n l n q i e a n l . x e t o l t f h i a i r i n smu a in r s l h we h t h s i r v d a g r h i c e s d l c l ai n p e iin i l t e u t s o d t a i mp o e lo t m n r a e o ai t r c so . o s t i z o
p o e i h e rl tr to o aiai n a g rt m s p o s d r v d w i a h wa r po e .Ba e n t h oy t t te e u lt r l s d o he t e r ha h q iae a