第五讲-空间域平滑处理
空间域平滑
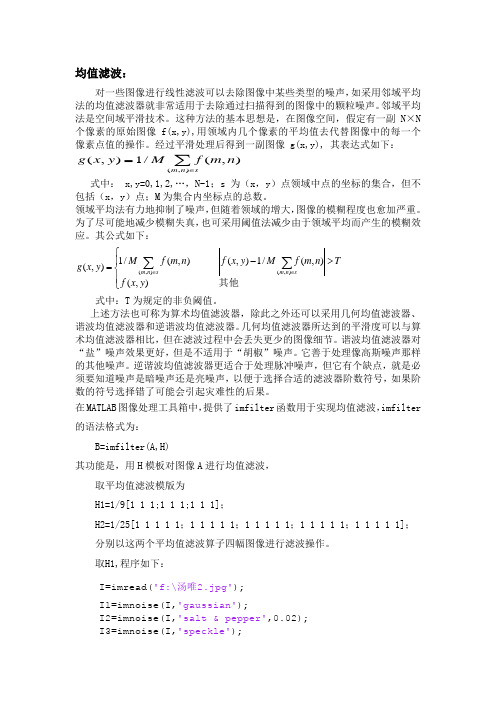
均值滤波:对一些图像进行线性滤波可以去除图像中某些类型的噪声,如采用邻域平均法的均值滤波器就非常适用于去除通过扫描得到的图像中的颗粒噪声。
邻域平均法是空间域平滑技术。
这种方法的基本思想是,在图像空间,假定有一副N ×N 个像素的原始图像f(x,y),用领域内几个像素的平均值去代替图像中的每一个像素点值的操作。
经过平滑处理后得到一副图像 g(x,y), 其表达式如下: ∑∈=s n m n m f My x g ),(),(/1),(式中: x,y=0,1,2,…,N-1;s 为(x ,y )点领域中点的坐标的集合,但不包括(x ,y )点;M 为集合内坐标点的总数。
领域平均法有力地抑制了噪声,但随着领域的增大,图像的模糊程度也愈加严重。
为了尽可能地减少模糊失真,也可采用阈值法减少由于领域平均而产生的模糊效应。
其公式如下: ⎪⎩⎪⎨⎧>-=∑∑∈∈其他),(),(/1),(),(/1),(),(),(y x f Tn m f M y x f n m f M y x g s n m s n m式中:T 为规定的非负阈值。
上述方法也可称为算术均值滤波器,除此之外还可以采用几何均值滤波器、谐波均值滤波器和逆谐波均值滤波器。
几何均值滤波器所达到的平滑度可以与算术均值滤波器相比,但在滤波过程中会丢失更少的图像细节。
谐波均值滤波器对“盐”噪声效果更好,但是不适用于“胡椒”噪声。
它善于处理像高斯噪声那样的其他噪声。
逆谐波均值滤波器更适合于处理脉冲噪声,但它有个缺点,就是必须要知道噪声是暗噪声还是亮噪声,以便于选择合适的滤波器阶数符号,如果阶数的符号选择错了可能会引起灾难性的后果。
在MATLAB 图像处理工具箱中,提供了imfilter 函数用于实现均值滤波,imfilter 的语法格式为:B=imfilter(A,H)其功能是,用H 模板对图像A 进行均值滤波,取平均值滤波模版为H1=1/9[1 1 1;1 1 1;1 1 1];H2=1/25[1 1 1 1 1;1 1 1 1 1;1 1 1 1 1;1 1 1 1 1;1 1 1 1 1]; 分别以这两个平均值滤波算子四幅图像进行滤波操作。
第五讲 空间域平滑处理
3维物体平滑算法

3维物体平滑算法
在计算机图形学中,对三维物体进行平滑处理的算法有很多种。
以下是其中几种常见的算法:
1. 法向量平滑(Normal Smoothing):
•该方法基于物体表面的法向量 (法线)来平滑三维模型。
通过在相邻顶点之间插值法线,使得表面法线变化更加平缓,减少棱角的感觉,从而呈现出更加自然的外观。
2. 光滑着色(Phong Shading):
•Phong着色是一种基于光照模型的算法,用于呈现物体表面光滑的外观。
它使用法向量和光线方向来计算表面的反射率,通过平滑插值法计算每个片元的颜色值,使得表面看起来更加光滑。
3. 平均法线(Average Normal):
•通过计算三角形片元的法向量,并将相邻三角形的法向量进行平均,然后重新赋值给顶点,从而减少法线的不连续性,实现平滑的外观。
4. Laplacian 平滑:
•Laplacian 平滑方法尝试通过使每个顶点的位置与其相邻顶点的平均位置接近,从而平滑整个模型。
这种方法在一定程度上可以减少模型的噪音和不规则性。
5. Catmull-Clark 曲面细分:
•Catmull-Clark 曲面细分是一种迭代的细分方法,通过重复的细分网格并计算新顶点的位置,逐渐生成更加平滑的曲面。
这种方法常用于生成细致的曲面模型。
这些算法和方法通常被用于计算机图形学中,用来对三维模型进行表面平滑处理,使其看起来更加逼真和自然。
选择合适的平滑算法取决于应用的具体场景和需求。
数据平滑处理算法
数据平滑处理算法
数据平滑处理算法是一种用于处理具有不平滑性的数据的方法。
它的目的是通过对数据进行平滑处理,从而减少数据中的噪音和离群值,提高数据的可读性和可靠性。
以下是一些常见的数据平滑处理算法:
1. 移动平均法:该方法使用一个窗口(通常是固定大小的滑动窗口)来计算数据点的平均值。
这种平均值将作为平滑后的数据点。
移动平均法适用于平稳的时间序列数据。
2. 加权移动平均法:与移动平均法类似,但是加权移动平均法对不同的数据点赋予不同的权重。
较近的数据点通常具有更高的权重,因为它们对平滑后的结果影响更大。
3. Savitzky-Golay滤波器:该滤波器是一种基于多项式拟合方
法的平滑技术。
它使用滑动窗口并通过拟合多项式来估计数据点的平滑值。
Savitzky-Golay滤波器在去除噪音的同时,还能
保持数据的一阶和二阶导数的连续性。
4. Loess平滑法:该方法使用局部加权回归来平滑数据。
它通
过在每个数据点周围选择一个子集,并拟合一个局部加权线性回归模型来计算平滑的数据点。
5. Kalman滤波器:该滤波器是一种递归滤波算法,通过使用
测量值和预测模型来估计未知的系统状态。
Kalman滤波器可
以用于平滑时间序列数据,并对噪音和误差进行去除。
以上是一些常用的数据平滑处理算法,选择哪种算法应根据具体的数据类型和需求来确定。
空间域处理
空间域图像处理主要分为灰度变换和空间滤波两类。
灰度变换在像素上操作,主要以改变对比度和阈值处理为目的。
空间滤波涉及改善性能的操作,如对每一个像素的领域处理来平滑或锐化图像。
本章的基本处理模型个g(x,y)=T[f(x,y)],f是输入图像,g是处理后的图像,T是点(x,y)的邻域上定义的关于f的一种算子。
灰度变换1、图像反转2、对数变换3、幂律(伽马)变换4、分段线性变换函数Imadjust灰度图像进行亮度变换的基本IPT工具,语法g=imadjust(f,[low_in high_in],[low_out high_out],gamma)参数说明:输入图像应为uint8,uint16,double类图像,输出图像与输入图像有相同的类。
除图像f外,函数的所有输入输出均指定在0和1之间,而不论图像f的类。
[low_in high_in]或[low_out high_out]使用空矩阵([])会得到默认值[01].具体应用见IP48的例子Intrans是负片,对数,伽马,对比度拉伸的集成函数。
5、直方图均衡(重点)库函数程序IP59.m空间滤波(一)平滑空间滤波器平滑滤波器用于模糊处理和降低噪声,因此常用于预处理的任务中,常称为均值滤波器。
1、平滑线性滤波器2、统计排序(非线性)滤波器库函数ordfilt2(f,order,domain)(i)最小值(ii)最大值(iii)中值3、图像处理工具箱的介绍Fspecial用来生成滤波掩模的W的函数见程序test_fspecial.mclear all;close all;clc;w_average=fspecial('average',[33]);%矩形平均滤波器w_disk=fspecial('disk',4);%圆形平均滤波器w_gaussian=fspecial('gaussian',[33],0.5);%高斯滤波器%8-23行代码是库函数fspecial中生成高斯滤波掩模的具体代码p2=[33];p3=0.5;siz=(p2-1)/2;std=p3;%标准差[x,y]=meshgrid(-siz(2):siz(2),-siz(1):siz(1));arg=-(x.*x+y.*y)/(2*std*std);h=exp(arg);%在此之前都是严格按照p93页的公式计算的%下面的代码将上述生成的作h/sum(h(:))h(h<eps*max(h(:)))=0;sumh=sum(h(:));if sumh~=0,h=h/sumh;end;w_laplacian=fspecial('laplacian',0.5);%大小为3*3的拉普拉斯滤波器w_log=fspecial('log',[55],0.5);%大小为5*5,标准差为0.5的高斯——拉普拉斯滤波器%%27-43行代码是库函数fspecial中生成高斯——拉普拉斯滤波掩模的具体代码.参照P460的公式%first calculate Gaussianp2=[55];p3=0.5;siz=(p2-1)/2;std2=p3^2;[x,y]=meshgrid(-siz(2):siz(2),-siz(1):siz(1));arg=-(x.*x+y.*y)/(2*std2);h=exp(arg);h(h<eps*max(h(:)))=0;sumh=sum(h(:));if sumh~=0,h=h/sumh;end;%now calculate Laplacianh1=h.*(x.*x+y.*y-2*std2)/(std2^2);h=h1-sum(h1(:))/prod(p2);%make the filter sum to zero,sum(h)->0;(二)锐化空间滤波器1、关于一阶二阶微分的分析(P98)2、二阶微分图像锐化——拉普拉斯算子close all;clear all;clc;f=imread('Fig0338(a)(blurry_moon).tif');figure,imshow(f);原图w=fspecial('laplacian',0);g1=imfilter(f,w,'replicate');figure,imshow(g1,[]);结果分析:上图的所有像素值都为正,。
空间域平滑处理PPT40页
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
Байду номын сангаас
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
40
空间域平滑处理
1、合法而稳定的权力在使用得当时很 少遇到 抵抗。 ——塞 ·约翰 逊 2、权力会使人渐渐失去温厚善良的美 德。— —伯克
3、最大限度地行使权力总是令人反感 ;权力 不易确 定之处 始终存 在着危 险。— —塞·约翰逊 4、权力会奴化一切。——塔西佗
5、虽然权力是一头固执的熊,可是金 子可以 拉着它 的鼻子 走。— —莎士 比
数字图像的空间域平滑滤波
数字图像的空间域平滑滤波指导老师:张朝阳院系:电子信息与电气工程学院班级:Z1003423姓名:陆加海学号:1100342091完成日期:2010.5目录数字图像的空间域平滑滤波 (1)数字图像的空间域平滑滤波 (3)1. 实验目的 (3)2. 实验原理 (3)2.1 空间域平滑滤波基本原理 (3)2.2 空间域平滑滤波器 (3)3. 实验内容及实现方案 (3)3.1 实验内容 (3)3.2 实现方案 (4)4. 实验步骤 (4)4.1 噪声加入 (4)4.2 椒盐噪声在不同领域值下的均值滤波 (4)4.3 对椒盐噪声进行均值、中值滤波 (5)4.4 对高斯噪声进行均值、中值滤波 (5)4.5 自行设计空间滤波器 (5)5. 实验结果分析 (6)5.1 噪声加入 (6)5.2 椒盐噪声在不同领域值下的均值滤波 (6)5.3 对椒盐噪声进行均值、中值滤波 (6)5.4 对高斯噪声进行均值、中值滤波 (6)5.5 自行设计空间滤波器 (7)数字图像的空间域平滑滤波1.实验目的1)掌握图像空间域平滑滤波的基本定义及目的。
2)理解空间域平滑滤波的基本原理及方法。
3)掌握进行图像空间域平滑滤波的方法。
2.实验原理2.1 空间域平滑滤波基本原理空间域滤波是在图像空间中借助模板进行领域操作,处理图像每一个都是根据模板对输入像素相应领域内的像素值进行计算得到的。
空间域滤波器根据功能主要分为平滑滤波器和锐化滤波器。
平滑可用低通来实现,平滑的目的可分为两类:一类是模糊,目的是在提取较大的目标前去除太小的细节或将目标内的小肩端连接起来;另一类是消除噪声。
2.2 空间域平滑滤波器最常用的平滑滤波器有均值滤波器和中值滤波器。
均值滤波器是线性平滑滤波器,其所有系数都是正数对3×3模板来说,最简单的是取所有系数为1,为了保持图像仍然在原来图像的灰度值范围内,模块与像素领域的乘积都要除以9。
中值滤波器是一种常用的非线性平滑滤波器,其原理与均值滤波器原理类似,但计算的不是加权求和,而是把领域中的图像的像素按灰度级进行排序,然后选择组的中间值作为输出像素值。
python简单图像处理(10)空间域图像平滑
python简单图像处理(10)空间域图像平滑图象平滑的主要⽬的是减少图像噪声图像噪声来⾃多⽅⾯,常见的噪声有以下⼏种:加性噪声、乘性噪声、量化噪声、椒盐噪声减少噪声的⽅法可以在空间域或是在频率域在空间域,基本⽅法是求像素的平均值或中值在频率域,运⽤的是低通滤波技术在这⾥我们只讲空间域的图象平滑。
频率域以后有机会再讲空间域的各种滤波器虽然形状不同,但在空间域实现图像滤波的⽅法是相似的。
都是利⽤模板卷积,即将图像模板下的像素与模板系数的乘积求和操作。
我们先来看3×3的模板:我们先来看看领域平均法:常⽤的平滑掩模算⼦有我们写程序来实现:import cvdef Filter(image,array):w = image.widthh = image.heightsize = (w,h)iFilter = cv.CreateImage(size,8,1)for i in range(h):for j in range(w):if i in [0,h-1] or j in [0,w-1]:iFilter[i,j] = image[i,j]else:a= [0]*9for k in range(3):for l in range(3):a[k*3+l] = image[i-1+k,j-1+l]sum = 0for m in range(9):sum = sum+array[m]*a[m]iFilter[i,j] = int(sum)return iFilterH1 = [1.0/9]*9H2 = [1.0/10]*9H2[4] = 0.2H3 = [1.0/16,2.0/16,1.0/16,2.0/16,4.0/16,2.0/16,1.0/16,2.0/16,1.0/16]H4 = [1.0/8]*9H4[4] = 0image = cv.LoadImage('lena.jpg',0)iH1F = Filter(image,H1)iH2F = Filter(image,H2)iH3F = Filter(image,H3)iH4F = Filter(image,H4)cv.ShowImage('image',image)cv.ShowImage('iH1F',iH1F)cv.ShowImage('iH2F',iH2F)cv.ShowImage('iH3F',iH3F)cv.ShowImage('iH4F',iH4F)cv.WaitKey(0)效果如下:不同算⼦间差别很⼩,⾄少这幅图是这样的我们再来看看中值滤波器中值滤波器不存在算⼦的概念,只有窗⼝的概念选取以某⼀点为中⼼的窗⼝,对窗⼝中所有点灰度值取中值,将灰度值的中值付给这⼀点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。