单容水箱建模分析
第一个 单容自衡水箱液位特性测试实验
第一节 单容自衡水箱液位特性测试实验一、实验目的1.掌握单容水箱的阶跃响应测试方法,并记录相应液位的响应曲线; 2.根据实验得到的液位阶跃响应曲线,用相应的方法确定被测对象的特征参数K 、T 和传递函数;二、实验设备PCS-E 过程控制综合实验装置,电脑 三、实验原理所谓单容指只有一个贮蓄容器。
自衡是指对象在扰动作用下,其平衡位置被破坏后,不需要操作人员或仪表等干预,依靠其自身重新恢复平衡的过程。
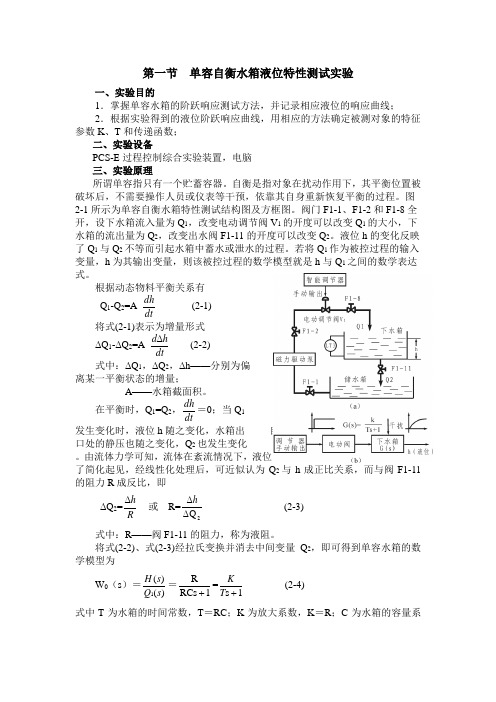
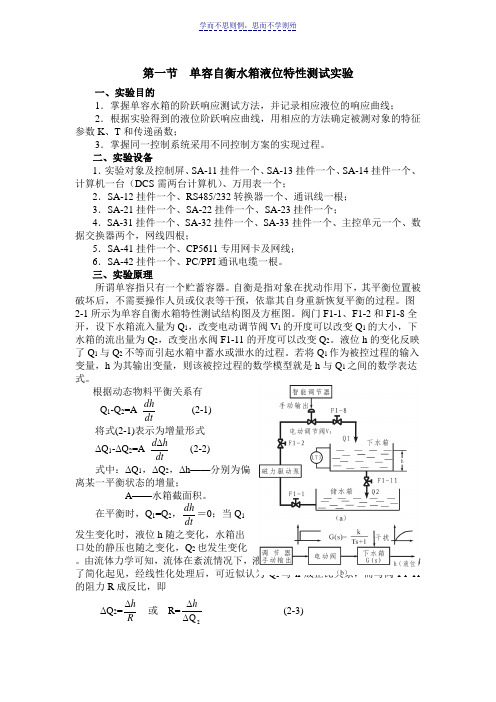
图2-1所示为单容自衡水箱特性测试结构图及方框图。
阀门F1-1、F1-2和F1-8全开,设下水箱流入量为Q 1,改变电动调节阀V 1的开度可以改变Q 1的大小,下水箱的流出量为Q 2,改变出水阀F1-11的开度可以改变Q 2。
液位h 的变化反映了Q 1与Q 2不等而引起水箱中蓄水或泄水的过程。
若将Q 1作为被控过程的输入变量,h 为其输出变量,则该被控过程的数学模型就是h 与Q 1之间的数学表达式。
根据动态物料平衡关系有Q 1-Q 2=Adtdh (2-1)将式(2-1)表示为增量形式 ΔQ 1-ΔQ 2=Adth d ∆ (2-2)式中:ΔQ 1,ΔQ 2,Δh ——分别为偏 离某一平衡状态的增量;A ——水箱截面积。
在平衡时,Q 1=Q 2,dtdh =0;当Q 1发生变化时,液位h 随之变化,水箱出 图2-1 单容自衡水箱特性测试系统 口处的静压也随之变化,Q 2也发生变化 (a )结构图 (b )方框图。
由流体力学可知,流体在紊流情况下,液位h 与流量之间为非线性关系。
但为了简化起见,经线性化处理后,可近似认为Q 2与h 成正比关系,而与阀F1-11的阻力R 成反比,即ΔQ 2=Rh ∆ 或 R=2Q ∆∆h (2-3)式中:R ——阀F1-11的阻力,称为液阻。
将式(2-2)、式(2-3)经拉氏变换并消去中间变量Q 2,即可得到单容水箱的数学模型为W 0(s )=)()(1s Q s H =1RCs R +=1s +T K (2-4)式中T 为水箱的时间常数,T =RC ;K 为放大系数,K =R ;C 为水箱的容量系数。
一阶单容上水箱对象特性的测试实验报告

《控制工程实验》实验报告实验题目:一阶单容上水箱对象特性的测试课程名称:《控制工程实验》姓名:学号:专业:年级:院、所:日期: 2019.04.05实验一一阶单容上水箱对象特性的测试一、实验目的1. 掌握单容水箱的阶跃响应测试方法,并记录相应液位的响应曲线;2. 根据实验得到的液位阶跃响应曲线,用相应的方法确定被测对象的特征参数K、T和传递函数;3. 掌握同一控制系统采用不同控制方案的实现过程。
二、实验设备1. 实验装置对象及控制柜 1套2. 装有Step7、WinCC等软件的计算机 1台3. CP5621专用网卡及MPI通讯线各1个三、实验原理所谓单容指只有一个贮蓄容器。
自衡是指对象在扰动作用下,其平衡位置被破坏后,不需要操作人员或仪表等干预,依靠其自身重新恢复平衡的过程。
图1所示为单容自衡水箱特性测试结构图及方框图。
阀门F1-1和F1-6全开,设上水箱流入量为Q1,改变电动调节阀V1的开度可以改变Q1的大小,上水箱的流出量为Q 2,改变出水阀F1-11的开度可以改变Q2。
液位h的变化反映了Q1与Q2不等而引起水箱中蓄水或泄水的过程。
若将Q1作为被控过程的输入变量,h为其输出变量,则该被控过程的数学模型就是h与Q1之间的数学表达式。
根据动态物料平衡关系有:Q1−Q2=A dhdt(1)变换为增量形式有:∆Q1−∆Q2=A d∆hdt(2)其中:∆Q1,∆Q2,∆ℎ分别为偏离某一平衡状态的增量;A为水箱截面积图1 单容自衡水箱特性测试结构图(a)及方框图(b)在平衡时,Q1=Q2,dhdt=0;当Q1发生变化时,液位h随之变化,水箱出口处的静压也随之变化,Q2也发生变化。
由流体力学可知,流体在紊流情况下,液位h与流量之间为非线性关系。
但为了简化起见,经线性化处理后,可近似认为Q2与h成正比关系,与阀F1-11的阻力R成反比,即∆Q2=∆ℎR 或R=∆ℎ∆Q2(3)式中: R为阀F1-11的阻力,称为液阻。
实验五、单容水箱液位PID控制实验(DCS)

实验五、单容水箱液位PID控制实验(DCS)一、实验目的1)、熟悉单容水箱液位反馈PID控制系统硬件配置和工作原理。
2)、熟悉用P、PI和PID控制规律时的过渡过程曲线。
3)、定性分析不同PID控制器参数对单容系统控制性能的影响。
二、实验设备CS4000型过程控制实验装置,DCS系统、 PC机,监控软件。
三、实验原理一阶单容水箱PID控制方框图图为单回路上水箱液位控制系统。
单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用EPA系统控制。
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
一般言之,用比例(P)调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti调节合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
但是,并不是所有单回路控制系统在加入微分作用后都能改善系统品质,对于容量滞后不大,微分作用的效果并不明显,而对噪声敏感的流量系统,加入微分作用后,反而使流量品质变坏。
对于我们的实验系统,在单位阶跃作用下,P、PI、PID调节系统的阶跃响应分别如下图中的曲线①、②、③所示。
P、PI和PID 调节的阶跃响应曲线四、实验步骤(1)关闭出水阀,将CS4000 实验对象的储水箱灌满水(至最高高度)。
单双容水箱

滨江学院计算机综合控制实验题目A3000过程控制实验院系滨江学院自动控制系专业电气工程与自动化学生姓名* * *学号20090000000指导教师郭伟目录一、PID控制原理二、被控对象的分析三、PID参数整定方法四、单、双容控制结构图五、仿真结果与分析六、结束语七、参考文献摘要本论文的目的是设计单、双容水箱液位串级控制系统。
在设计中充分利用计算机控制技术,自动控制技术,以实现对水箱液位的串级控制。
作为一个过程控制实验装置,单、双容水箱液位控制系统具有强大的实验功能,不仅可以实现单入单出一阶对象、二阶对象、和非线性双入双出对象,而且还可以作为一种多功能型实验设备去验证各种工业过程的控制算法。
针对双容水箱大滞后系统,采用PID方法去控制。
首先对PID控制中各参数的作用进行分析,采用根轨迹校正、伯德图校正的方法,对系统进行校正。
最后采用调整系统控制量的模糊PID控制的方法,对该二阶系统进行控制。
关键词 : 单、双容水箱串级控制 PID 控制一、PID控制原理当今的自动控制技术绝大多数部分是基于反馈。
反馈理论包括三个基本要素:测量、比较和执行。
测量关心的是变量,并与期望值相比较,以此偏差来纠正和调节控制系统的响应。
反馈理论及其在自动控制的应用的关键是:作出正确的测量与比较后,如何将偏差用于系统的纠正和调节。
在过去的几十年里,PID控制,即比例-积分-微分控制在工业控制中得到了广泛的应用。
虽然各种先进控制方法不断涌现,但PID控制器由于结构简单,在实际应用中较易于整定,且具有不需精确的系统模型等优势,因而在工业过程控制中仍有着非常广泛的应用。
而且许多高级的控制技术也都是以PID控制为基础的。
下面是典型的PID控制系统结构图图1-1其中PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
(1)比例(P)调节作用是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
实验一单容水箱对象特性测试虚拟实验

实验一 单容水箱对象特性测试实验一、实验目的及要求1、了解过程特性测试的原理。
2、掌握过程特性计算机测试方法。
二、预习思考题1、什么是过程特性?为什么要获得过程特性?2、过程特性有哪些类型,其各自的主要特点是什么?3、过程特性测试的方法有哪些?三、实验原理本实验是采用阶跃扰动法获取一阶对象的过程特性。
阶跃扰动法又称为反应曲线法。
当过程处于稳定状态时,在过程的输入端施加一个幅度已知的阶跃扰动,测量和记录过程输出变量的数值,即可画出输出变量随时间变化的反应曲线。
根据响应曲线,再经过处理,就能得到过程特性参数。
图1-1即为根据响应曲线求取过程特性的方法。
采用该方法,求得三个参数,放大倍数K ,时间常数T 和纯滞后τ。
图1-1 阶跃扰动法求过程特性四、虚拟实验原理和步骤1、实验原理 虚拟实验的原理是用数学模型模拟一阶过程.设一阶对象的传递函数模型为:(t F A )(t c A B /B放大系数:时间常数:T 纯滞后:τse TS S G τ-+=1K )(其中K 、T 、τ三个参数就可以表征过程特性。
不同的过程,这三个参数不同。
为了方便计算机数值仿真,这里取微分方程形式:u x T dt dx +-=1 x T K y =其中x 表示状态,y 表示输出,u 表示输入。
(实验一这里可以不考虑)2、实验步骤1.当学生选择开始实验室,系统随机给出三个参数K 、T 、τ(学生是看不到的)。
为了方便数值仿真,建议如下参数设置范围:K 可以取1~20,T 可以取2~40, τ 可以取(0~0.3)×T 。
参数设置好后且学生选择开始实验时,系统自动把u 从0变化到1(可理解为图1-1中的A 为1),则可以按照如下的关系,得到x 随时间t 变化的规律: x(t)= K[1-exp(-Tτ-t )] 2在实验过程中,系统自动绘出x ~t 曲线,其中x 为纵坐标,t 为时间,是横坐标。
横坐标t 的范围是0~M t ,这里M t 随不同的过程特性会不同,要求是到达M t 时,x 的数值几乎不再变化,即系统达到了新的稳态,这时系统可以自动中止实验,当然,实验过程中最好也允许学生中止实验。
第一节单容自衡水箱液位特性测试实验
第一节 单容自衡水箱液位特性测试实验一、实验目的1.掌握单容水箱的阶跃响应测试方法,并记录相应液位的响应曲线;2.根据实验得到的液位阶跃响应曲线,用相应的方法确定被测对象的特征参数K 、T 和传递函数;3.掌握同一控制系统采用不同控制方案的实现过程。
二、实验设备1.实验对象及控制屏、SA-11挂件一个、SA-13挂件一个、SA-14挂件一个、计算机一台(DCS 需两台计算机)、万用表一个;2.SA-12挂件一个、RS485/232转换器一个、通讯线一根;3.SA-21挂件一个、SA-22挂件一个、SA-23挂件一个;4.SA-31挂件一个、SA-32挂件一个、SA-33挂件一个、主控单元一个、数据交换器两个,网线四根;5.SA-41挂件一个、CP5611专用网卡及网线;6.SA-42挂件一个、PC/PPI 通讯电缆一根。
三、实验原理所谓单容指只有一个贮蓄容器。
自衡是指对象在扰动作用下,其平衡位置被破坏后,不需要操作人员或仪表等干预,依靠其自身重新恢复平衡的过程。
图2-1所示为单容自衡水箱特性测试结构图及方框图。
阀门F1-1、F1-2和F1-8全开,设下水箱流入量为Q 1,改变电动调节阀V 1的开度可以改变Q 1的大小,下水箱的流出量为Q 2,改变出水阀F1-11的开度可以改变Q 2。
液位h 的变化反映了Q 1与Q 2不等而引起水箱中蓄水或泄水的过程。
若将Q 1作为被控过程的输入变量,h 为其输出变量,则该被控过程的数学模型就是h 与Q 1之间的数学表达式。
根据动态物料平衡关系有Q 1-Q 2=A dtdh (2-1) 将式(2-1)表示为增量形式ΔQ 1-ΔQ 2=A dth d ∆ (2-2) 式中:ΔQ 1,ΔQ 2,Δh ——分别为偏离某一平衡状态的增量;A ——水箱截面积。
在平衡时,Q 1=Q 2,dtdh =0;当Q 1 发生变化时,液位h 随之变化,水箱出 图2-1 单容自衡水箱特性测试系统 口处的静压也随之变化,Q 2也发生变化 (a )结构图 (b )方框图。
单容水箱文档
K a 1 m u 1 2 gx1 x A1 A1 y x 1
若上面未知参数取如下值
(7)
K m 4.6 10 6 m 3 / sec / Volt Lmax 0.3m A1 15.5179 10 4 m 2 a1 0.3087 10 4 m 2 h10 0.0001m g 9.8m / m 2
得系统状态空间方程为
1 29.6432u 0.0199 19.6 x1 x y x1
(8)
四、演示算法:PID
设定水泵输入电压为 10V,根据式(8)建立如 FIGURE. 4 所示的 Simulink 框图,其中 u 代表输入电压,系统模型为 S 函数编写的单容水箱非线性模型。对单容水箱进行比例控制, 只调整 PID 模块的比例参数,积分和微分参数皆为零。但这种控制方法只能对单个水箱进 行控制。设定比例控制系数为 1.2 得到水箱 1 的液位变化图如 FIGURE. 5 所示。
一、单容水箱的特点
被控对象水箱由一个水箱组成:THPFSY-2 型单容水箱液位对象。其主体由 1 个圆柱型 玻璃容器、1 个回收水槽、1 个手动连接阀门、1 个手动泄水阀门、1 个压力式液位传感器、 1 个水泵及连接构件组成。 单容液位控制系统是一个单回路反馈控制系统, 它的控制任务是使水箱液位等于给定值 所要求的高度; 并减小或消除来自系统内部或外部扰动的影响。 单回路控制系统由于结构简 单、 投资省、 操作方便、 且能满足一般生产过程的要求, 故它在过程控制中得到广泛地应用。
FIGURE. 4 单容水箱的 Simulink 框图
FIGURE. 5 水箱 1 的液位图
二、单容水箱的结构和工作原理
Figure. 1
实验1 一阶单容水箱对象特性测试实验
实验1 一阶单容水箱对象特性测试实验一、实验目的1、熟悉单容水箱的数学模型及其阶跃响应曲线;2、根据实际测得的单容水箱液位的阶跃响应曲线,用相关的方法分别确定它们的参数。
二、实验设备AE2000B 型过程控制实验装置、秒表三、系统结构框图图1、 单容水箱系统结构图四、实验原理阶跃响应测试法是系统在开环运行条件下,待系统稳定后,通过调节器或其他操作器,手动改变对象的输入信号(阶跃信号)。
同时,记录对象的输出数据或阶跃响应曲线,然后根据已给定对象模型的结构形式,对实验数据进行处理,确定模型中各参数。
图解法是确定模型参数的一种实用方法,不同的模型结构,有不同的图解方法。
单容水箱对象模型用一阶加时滞环节来近似描述时,常可用两点法直接求取对象参数。
如图1所示,设水箱的进水量为Q 1,出水量为Q 2,水箱的液面高度为h ,出水阀V 2固定于某一开度值。
根据物料动态平衡的关系,求得:222d hR Ch R Q dt∆+∆=∆ (1)h1( t ) h1(∞ ) 0.63h1(∞)0 T在零初始条件下,对上式求拉氏变换,得:22()()()11R H s KG s Q s R CS TS ===++ (2) 式中,T 为水箱的时间常数(注意:阀V 2的开度大小会影响到水箱的时间常数),T=R 2*C ,K=R 2为过程的放大倍数,R 2为V 2阀的液阻,C 为水箱的容量系数。
令输入流量Q 1(S )=R 0/S ,R 0为常量,则输出液位的高度为:000()(1)1KR KR KR H s S TS S S ==++(3) 当t=T 时,则有:h(T)=KR 0(1-e -1)=0.632KR 0=0.632h(∞),即h(t)=KR 0(1-e -t/T ) 当t —>∞时,h(∞)=KR 0,因而有K=h(∞)/R 0 = 输出稳态值/阶跃输入式(2)表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图2所示。
单容水箱液位控制系统的PID算法
自动控制原理课程设计报告单容水箱液位控制系统的PID算法摘要随着科技的进步,人们对生产的控制精度要求越来越高,水箱液位系统是过程控制中一种典型的控制对象,提高液位控制系统的性能十分重要。
本文针对理想的单容水箱液位系统,将包括单容水箱、电动机等在内的部分分别建立数学模型,并加入常规PID对系统性能进行调节。
但由于实际单容水箱液位系统具有时滞性和非线性,实际生产中若要对其建立精确的数学模型比较困难。
因此,将模糊控制的方法引用到对单容水箱液位系统的PID控制中,通过Simulink仿真验证了算法的有效性。
结果表明,和常规PID控制相比,模糊PID控制具有良好的动静态品质。
关键词单容水箱液位; PID控制; MA TLAB; Simulink; 模糊控制.PID control method in water level system of single-tankABSTRACT With the development of technology, the control precision is more and more important. And the water level system of single-tank is a typical control target in process control. The article mainly deals with the water level system of single-tank. It establishes mathematics model for every part of the system, and uses the traditional PID to improve the function . But in actual industry,it’s hard to establishes precise mathematics model. So, it introduces fuzzy PID control in this system. The result suggests that fuzzy PID control is more suitable than the traditional one.KEY WORDS the water level of single-tank; PID control; MA TLAB ; Simulink; fuzzy control.在工业过程控制中,被控量通常有:液位、压力、流量和温度。
一阶上水箱对象特性测试与单回路控制实验
一阶上水箱对象特性测试与单回路控制实验一、实验目的:测量单容水箱特性曲线构成单回路,加入阶跃扰动,调节PID 参数得到4:1曲线。
二、主要内容:1、生产过程(液位)的建模试验(测试不同流阻下的响应曲线,注意过程的非线性特性);2、单回路(液位)控制系统的投运,测试不同PID 参数下的系统品质指标的区别,总结PID 控制作用对控制质量的影响。
三、实验数据:1)()(S W +==Ts K S X S H )(单容过程的传递函数: 特性参数为K 、T 。
K=(h2-h1)/x=21.4/0.1=214;T=R*C=0.819*415.265=340.1s其中R=(h2-h1)/(Q2-Q1)=0.819s/cm*cmQ1=V1/t1=34.34ml/sQ2=V2/t2=60.46ml/s计算得到实验模型传递函数的的参数后,便可以用方程来表示出该模型。
K=214 T=3402将水箱构成单回路闭环控制图1一般言之,用比例(P )调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI )调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti调节合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
首先,不加入积分与微分。
适当的调节比例度,曲线没有超调,当减小比例度时,余差随着减小了。
然后加入积分环节来消除余差,将I调节到150余差减小了,继续减小I,结过系统震荡此时第一波峰很大超调亮量明显增加,为消除震荡,将P增加为4,这是震荡减小。
最后再增加微分作用,超调量变得比之前更好,此时可以适当减小比例度P,使系统余差进一步减小,得到了接近4:1的曲线。
四、开环特性曲线与闭环控制曲线开度由20%变为30%时:图2P=1.5时,如图4P=1.5,I=150时的曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
过控单容水箱建模原理
1、单容储液箱液位过程
μ-----阀门开度,被控过程的输入变量
Q1-----流入量,中间变量
Q2-----流出量,中间变量
h-----液位,被控过程的输出变量
A-----储液箱横截面积
(建立进水阀门开度μ和液位h之间的动态关系)
流入量
流出量
系统输入量:进水阀门开度μ%
输出量:液位h
水箱横截面积:A (储存物质的能力)
流入量Q1由μ大小控制
流出量Q2由出水阀控制,当μ2不变时液位h越高,静压越大,Q2越大
动态物质平衡关系
稳态时变量为
各变量相对稳态的增量为:
流入量、流出量的变化量的物理关系
Q
1
H
S
R
Q
2
A
1
Q
2
Q
1
=QK
hkQ
2
12
12
1()dvQQdh
QQdtdtAVAh
102000
0
1020
,,,0QQh
dh
QQAhdt不变
01110
22200
,,hhhQQQQQQ
1
22Qs
s
KKhhQRRQ,假设进水阀前后压差不变,为常数
或
结论:
容量系数的影响
容积系数是衡量一个过程对象存贮物质(或能量)的能力的物理量,在此水箱对象的容量系
数就是水箱的截面积A。若水箱截面积A越大,对于出现同样大小的不平衡流量(Q1-Q2),水箱
液位h变化的速度就越小,即抵抗扰动的能力强。从这一方面来说,容量系数描述了对象抵抗
扰动的能力。
时间常数T=RsA,当阀阻Rs不变时,水槽的截面积A越大,说明要使液位上升一个单
位所需的存水量就越大,因此在同样的阶跃扰动量输入下,起始上升的速度就越小,因此水位h
以该起始速度达到稳态值所需的时间就越长,即时间常数T越大。因此容量系数越大,对象的
,ssdhTARKKRdt令,则有:T+h=K
()()()()()1TsHsHsKsHsKsTs
得到:
TTARsARsTK为液位过程的时间常数,显然与水箱存储能力和出水阀液阻有关,、越大,越大
为液位过程的放大系数,与进水阀流量比例系数和出水阀液阻有关
惯性越大。
阀阻Rs的影响
单容水箱中,在阀门2开度一定时,流出水量Q2的大小取决于液位h的高低。换言之,水槽流
出水量每变化一个单位需要液位变化多少,就取决于流出侧阀门2的阻力。即阻力表达为:
当液位h变化范围较小时,阀门阻力Rs可近似看成常数,一般用稳态时Δh/ΔQ2|t=∞来
代替Rs.
由于放大系数K=KμRs,因此,对象的阻力越大,则其放大系数K就越大。就是说在同样的阶
跃扰动量输入下,稳态时阻力大的对象其h(∞)越大。
Rs增大后其稳态值增大,且其时间常数也增大,这是因为时间常数T=ARs与阻力Rs也有关。
进水阀流量系数Kμ的影响
进水阀流量系数越大,同样的阀门开度变化时的进水量Q1越大,显然液位的增幅就越大,系统
的放大系数就越大
2
s
hRQ
,ssTARKKR