多容水箱的建模
过程控制课程设计三容水箱液位控制系统的建模与仿真
目录摘要 (1)1 两种三容水箱的工作原理 (1)1.1 三容水箱的结构 (1)1.2 三容水箱系统的特点 (2)2 两种三容水箱的理论建模 (3)2.1 假设及相关参数定义 (3)2.2 执行器(阀门)的数学模型 (4)2.3 阶梯式三容水箱的数学模型 (4)2.4 水平式三容水箱的数学模型 (6)3两种三容水箱模型的控制与仿真 (7)3.1 阶梯式三容水箱的简单PID控制 (8)3.2 阶梯式三容水箱的串级PID控制 (9)3.3 水平式三容水箱的简单PID控制 (11)3.4 水平式三容水箱串级PID控制 (12)4 总结 (14)5 心得体会 (14)5.1 顾振博心得体会 (14)5.2 陈冶心得体会 (15)5.3 谢海龙心得体会 (15)参考文献 (16)附录 (16)所用参数及其数值 (16)摘要三容水箱是工业过程中许多被控对象的典型抽象模型,在非线性、大惯性过程控制研究应用中具有广泛代表性。
近年来国内外许多学者对三容水箱系统的建模方法、控制算法及故障诊断等方面进行了探讨。
进一步研究三容水箱系统的控制算法并构建现在实验教学系统,在工业控制领域和工程控制论教学中都具有较为重要的理论和实际应用价值。
本设计通过对阶梯式、水平式这两种典型的水平式三容水箱系统分别进行理论建模,再分别加入了简单PID和串级PID控制器,并且在MATLAB的Simulink 仿真平台上搭建了相应的控制系统框图,对阶跃响应下的输出信号进行了仿真,实现了对两种三容水箱液位控制系统的控制。
1 两种三容水箱的工作原理1.1 三容水箱的结构三容水箱主体由3个圆柱型玻璃容器(Tankl(T1)、Tank2(T2)、Tank3(T3))、4个阀门(VT0、VT1、VT2、VT3、VT4)、一个增压泵、一个蓄水池和响应的连接部件组成。
实验台工作时,增压泵抽出储水箱内的水,通过比例电磁阀VT0注入容器T1,T1内的水再通过VT1、VT3依次流入T2和T3中,最终通过VT3流回蓄水池中,构成了一个封闭的回路。
三容水箱的机理建模
图# 三容水箱液位对象
被控参数!# 的动态方程可由下面几个关系式导出。
!""#*""+$",,!%", !"""*"%+$%,,!%%,
#""+&"(!")
#"%+&%(!%)
!""%*"#+$#,,!%# #"#+&#(!#)
所以状态方程为
$!"& $*$""&"(!")
& $"& $"
第56卷第3期
!"#$%"&’#()#**%)#("+!,)#-
4"&056,."03
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
文章编号:5375879:9(1223)2382;1582;
三容水箱的机理建模
赵 科,王生铁,张计科
同,均采用定积分元素法。
!当 &"$(时:
# )
+*
&
[#$(&
(
,!)]$/#(*, $+!)"!
+
"’.当*+( 万$#(方$$数)$&/据#"&-+/(#!时/%:(#$)$/#&%/#
(-)
)&’.*+(#$)$/#&+/#!/%(#$)$/#&%/#!
双容水箱建模与水位控制系统仿真
双容水箱建模与水位控制系统仿真摘要:利用实验室双容水箱实验设备建立数学模型,基于MATLAB与Simulink,利用自动控制原理与现代控制理论研究控制水位的控制器。
双容水箱上水箱水位与下水箱水位为变量,系统具有典型的非线性、滞后性,先基于实验室设备对双容水箱建建模,后利用MATLAB与Simulink设计液位控制器,实现串级控制并验证控制器有效性。
关键词:双容水箱,建模,MATLAB工业自动化生产和现代化的生活中常常会遇到液位的控制问题,如饮料加工、生活用水、城市污水净化等,常使用蓄液罐(池) [1],且需要蓄液罐(池)液位维持在一定范围内。
本研究先利用实验室的双容水箱设备进行实验,根据实验测量液位、流量等参数,近似拟合出线性模型,基于MATLAB与Simulink设计液位控制器,对于仿真结果和实验结果进行分析,通过研究掌握观察对象的数学模型建立方法与控制器设计与调试的方法。
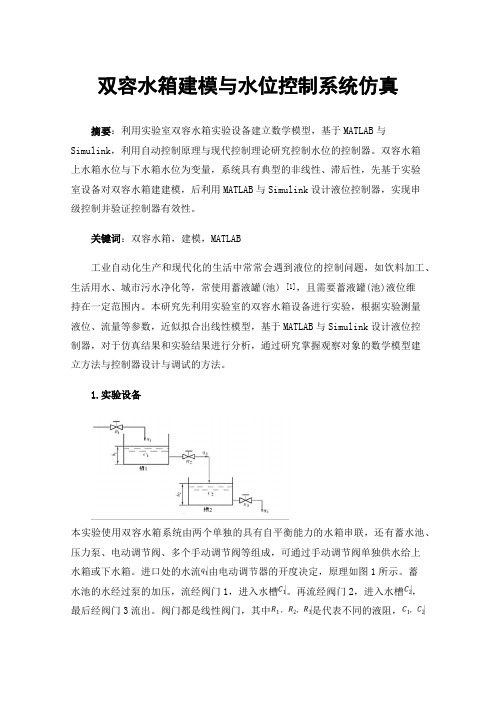
1.实验设备本实验使用双容水箱系统由两个单独的具有自平衡能力的水箱串联,还有蓄水池、压力泵、电动调节阀、多个手动调节阀等组成,可通过手动调节阀单独供水给上水箱或下水箱。
进口处的水流由电动调节器的开度决定,原理如图1所示。
蓄水池的水经过泵的加压,流经阀门1,进入水槽。
再流经阀门2,进入水槽,最后经阀门3流出。
阀门都是线性阀门,其中是代表不同的液阻,是上水箱和下水箱的容量,分别的上水箱、下水箱的液位高度,分别是上水箱的进水量,上水箱的出水量、下水箱的进水量,下水箱的出水量。
图1 双容水箱示意图2.实验原理与测量2.1实验原理上水箱和下水箱串联工作的双容过程系统,我们的被控量是下水箱的液位, 输入量上水箱的进水量。
双容水箱的数学模型一般为:其中为上水箱的时间常数,且;为第下水箱的时间常数,且;是过程的放大系数,;分别为两只水箱的容量系数[2]。
2.2实际测量阶跃响应曲线法测定属于实验法建模。
实验测试时将调节阀的开度作阶跃变化[3]。
双容水箱机理建模

双容水箱机理建模
双容水箱机理建模:
双容水箱机理建模是对双容水箱的一种理论表达和描述,通过建模可
以更加深刻地理解和掌握双容水箱的工作原理和特性。
以下是对双容
水箱机理建模的介绍:
一、双容水箱的基本结构
双容水箱主要由上下两个水容器和一个水泵组成。
上容器是储水容器,下容器是压力容器,水泵负责将上容器中的水向下压入下容器中。
二、双容水箱的工作原理
当水泵开始工作时,它会将上容器中的清水通过管道输送到下容器中。
由于下容器中没有空气,水压开始逐渐升高。
当水压升高到一定程度时,双容水箱开始起到储水的作用。
当水泵停止工作时,下容器中的
水压力继续保持,在需要用水的时候,水会从下容器中流出,形成稳
定的水压。
三、双容水箱的特点
1. 双容水箱能够有效地解决城市用水不稳定的问题,有利于保护用水
设施的正常运行。
2. 双容水箱的储水容量大,有利于满足一定时间内的用水需求。
3. 双容水箱的水压稳定,不会受到外界因素的影响,有利于用户舒适使用。
四、双容水箱机理建模的作用
1. 帮助人们更好地理解双容水箱的工作原理和特性,提高使用效率和安全性。
2. 为双容水箱的优化设计和改进提供理论支持。
3. 为双容水箱的智能化控制和管理提供理论基础。
综上所述,双容水箱机理建模是对双容水箱的一种理论研究和表达,通过建模可以更好地理解和掌握双容水箱的工作原理和特性,为其优化设计和智能化控制提供理论支持,有利于提高使用效率和安全性。
双容水箱对象的建模仿真控制系统分析与设计

双容水箱对象的建模仿真控制系统分析与设计一、引言随着现代科技的进步,控制系统在工业、农业和日常生活的各个领域中起着至关重要的作用。
其中,控制水箱系统是一个广泛应用的控制对象。
双容水箱系统是其中的一种,它由两个容量不同的水箱组成,通过管道和阀门连接起来,通过控制阀门的开关,控制系统可以实现对水的流量、水位和压力的控制。
本文将对双容水箱对象的建模仿真控制系统进行分析与设计,以此为基础,实现对水箱系统的精确控制。
二、系统分析1.系统目标:控制双容水箱系统中水的流量、水位和压力,实现对水箱的精确控制。
2.系统组成:双容水箱系统由两个容量不同的水箱、管道、阀门和传感器组成。
3.系统特性:双容水箱系统的特点是容量不同的两个水箱,通过控制阀门的开关,可以控制水的流动。
三、系统建模1.系统模型:建立双容水箱系统的模型,包括水箱、管道、阀门和传感器。
2.系统动力学:分析双容水箱系统的动力学特性,得到系统的数学模型。
3.控制策略:确定适合双容水箱系统的控制策略,设计控制器。
4.系统仿真:对双容水箱系统进行仿真实验,验证系统的控制效果。
四、系统设计1.硬件设计:选择适合双容水箱系统的传感器和执行器,设计系统的硬件结构。
2.软件设计:根据系统的数学模型,设计控制算法,实现对双容水箱系统的控制。
3.系统实现:根据设计的硬件结构和软件算法,实现控制系统。
4.系统测试:对实现的控制系统进行测试,验证系统的可行性和控制效果。
五、系统应用1.工业应用:将双容水箱控制系统应用于工业生产中,实现对工业生产过程中水位、流量和压力的精确控制。
2.农业应用:将双容水箱控制系统应用于农业灌溉系统中,实现对灌溉水位和流量的控制。
3.家庭应用:将双容水箱控制系统应用于家庭自来水系统中,实现对自来水的流量和压力的控制。
六、总结双容水箱对象的建模仿真控制系统分析与设计是一个综合性的工程项目,涉及到系统分析、建模、仿真和控制系统设计等多个方面。
通过对双容水箱系统的分析和建模,可以实现对水箱的精确控制,为工业、农业和家庭等领域提供了一种可行的解决方案。
双容水箱液位控制系统的建模及其PID控制算法研究

双容水箱液位控制系统的建模及其PID控制算法研究摘要随着工业生产的发展,双容水箱液位控制系统在国内各行各业的应用已经十分广泛。
本文通过理论推导,利用THKGK-1 型实验装置采集双容水箱液位的阶跃响应曲线,依据实验法建立双容水箱的数学模型,在MATLAB/Simulink下对线性PID控制器和双曲余弦增益的非线性PID控制器进行系统稳态与动态性能的研究。
结果表明:对于双容水箱这种大惯性、时延性、非线性被控对象,双曲余弦增益的非线性PID控制比线性PID控制更加快速、准确、稳定,能够迅速克服偏差,消除扰动。
关键词:双容水箱;实验法;双曲余弦增益;非线性PIDModel of the double coupled water tank liquid level control system and PID control algorithm researchAbstractAlong with the development of industrial production, the double coupled water tank liquid level control system has been widely applied in all walks of life at home.In this paper, through theoretical derivation, the author uses THKGK-1 type experimental apparatus to gather the step response curve of double coupled water tank liquid level and establishes the mathematical model of double coupled water tank based on the experimental method, and studies systematic steady state and dynamic performance of the linear PID controller and the hyperbolic cosine gain nonlinear PID controller under the MATLAB/Simulink.The results show that the hyperbolic cosine gain nonlinear PID control is more rapid, accurate, stable, and can more quickly overcome the deviation and eliminate disturbance than the linear PID control for the double coupled water tank which is the big inertia, time-delay, nonlinear controlled object.Key words: double coupled water tank; experimental method; hyperbolic cosine gain; nonlinear PID0.前言通常在生产过程当中的液位系统往往是随着时间变化的,由于系统的复杂,常有滞后特性,并且干扰成分繁多,波动性也很大。
毕业设计双容水箱系统的建模、仿真与控制
自动控制毕业设计双容水箱系统的建模、仿真与控制2015年 7月23日摘要自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义。
本次课程设计以过程控制实验室双容水箱系统作为研究对象,开展了机理建模、实验建模、系统模拟、控制系统分析与综合、控制系统仿真等多方面的工作。
课程设计过程中,首先进行了任务I即经典控制部分的工作,主要从系统模型辨识、采集卡采集、PID算法的控制、串联校正进行性能指标的优化、滞后控制等方面进行了设计。
然后,又进行了任务II即现代控制部分的工作,主要从系统模型的串并联实现、能控能观标准型实现、状态反馈设计、状态观测器设计、降维观测器设计等方面进行了深入的研究。
最后选做部分单级倒立摆的内容,并对整个课程设计做了总结。
关键词:自动控制;课程设计;PID控制;根轨迹;极点配置;MATLAB;数据采集;经典控制;现代控制。
目录第1章引言 (1)1.1 课程设计的意义与目的 (1)1.2 课程设计的主要内容 (1)1.3 课程设计的团队分工说明 (2)第2章双容水箱系统的建模与模拟 (3)2.1 二阶水箱介绍 (3)2.2 二阶水箱液位对象机理模型的建立 (3)2.3 通过实验方法辨识系统的数学模型的建立 (7)2.3.1 用试验建模(黑箱)方法辨识被控对象数学模型 (7)2.3.2 通过仿真分析模型辨识的效果 (8)2.4 物理系统模拟 (9)第3章双容水箱控制系统的构建与测试 (11)3.1 数据采集卡与数据通讯 (11)3.2 构建系统并进行开环对象测试 (12)第4章双容水箱的控制与仿真分析——经典控制部分 (14)4.1采用纯比例控制 (14)4.2采用比例积分控制 (17)4.3采用PID控制 (21)4.4串联校正环节 (24)4.5采样周期影响及滞后系统控制性能分析 (28)第5章双容水箱的控制与仿真分析——现代控制部分 (31)5.1状态空间模型的建立 (31)5.2状态空间模型的分析 (33)5.3状态反馈控制器的设计 (34)5.4状态观测器的设计 (37)5.5基于状态观测的反馈控制器设计 (43)第6章基于状态空间模型单级倒立摆控制系统设计 (48)6.1 单级倒立摆系统介绍 (48)6.2 状态空间模型的建立 (49)6.3 能控能观性、稳定性的分析 (52)第7章总结 (53)7.1 课程设计过程的任务总结与经验收获 (53)7.2 课程设计中的不足和问题分析 (53)7.3 对课程设计的建议 (53)参考文献 (54)附录 (55)附录A:组员个人总结(一) (55)附录B:组员个人总结(二) (57)第1章引言1.1 课程设计的意义与目的自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义。
毕业设计双容水箱系统的建模仿真与控制
毕业设计双容水箱系统的建模仿真与控制双容水箱系统的建模、仿真与控制是一种常见的控制系统设计问题,广泛应用于工程实践中。
本文将详细介绍双容水箱系统的建模、仿真与控制方法。
双容水箱系统是由两个水箱和一条水管组成的系统。
水箱之间通过水管连接,顶部设置了液位传感器进行监测。
控制系统的目标是通过控制水箱之间的水流,使得系统的液位保持在设定值附近。
这个问题既涉及到建模和仿真,又涉及到控制方法设计,是一个复杂的系统工程。
以下将分步骤介绍建模、仿真和控制方法。
首先,我们需要对双容水箱系统进行建模。
建模的目的是用数学模型描述系统的动态行为。
对于双容水箱系统,可以利用连续反应曲线方法进行建模。
该方法基于质量守恒原理和容积流量原理,根据水箱的液位变化率和水流量之间的关系,建立系统的微分方程模型。
接下来,我们可以利用建立的数学模型进行仿真分析。
仿真分析可以预测系统在不同工况下的动态响应,帮助我们理解系统的行为特性。
在仿真分析中,我们可以通过改变系统的参数和控制策略,来评估不同的调节方法对系统性能的影响,以及寻找最优的控制方案。
最后,我们需要设计控制方法来使得双容水箱系统达到所需的性能指标。
常用的控制方法包括比例积分微分控制(PID控制),模糊控制和自适应控制等。
在选择控制方法时,需要考虑系统的稳定性、鲁棒性和灵敏度等因素。
通过数学分析和干扰分析,可以确定最优控制参数,使得系统具有良好的控制性能。
总结起来,双容水箱系统的建模、仿真与控制是一个综合性的控制系统设计问题。
通过建立数学模型、进行仿真分析和设计合适的控制方法,可以使得系统达到所期望的控制目标。
该方法在工程实践中具有广泛应用,并可通过实际系统验证,为实际工程提供参考和指导。
三容水箱液位控制系统的建模与仿真
过程控制课程设计三容水箱液位控制系统的建模与仿真----------专业:自动化班级:----------组员:----------指导老师:----------重庆大学自动化学院2013年10月目录摘要 (1)1 两种三容水箱的工作原理 (1)1.1 三容水箱的结构 (1)1.2 三容水箱系统的特点 (2)2 两种三容水箱的理论建模 (3)2.1 假设及相关参数定义 (3)2.2 执行器(阀门)的数学模型 (4)2.3 阶梯式三容水箱的数学模型 (4)2.4 水平式三容水箱的数学模型 (6)3两种三容水箱模型的控制与仿真 (7)3.1 阶梯式三容水箱的简单PID控制 (8)3.2 阶梯式三容水箱的串级PID控制 (9)3.3 水平式三容水箱的简单PID控制 (11)3.4 水平式三容水箱串级PID控制 (12)4 总结 (14)5 心得体会 (14)5.1 顾振博心得体会 (14)5.2 陈冶心得体会 (15)5.3 谢海龙心得体会 (15)参考文献 (16)附录 (16)所用参数及其数值 (16)摘要三容水箱是工业过程中许多被控对象的典型抽象模型,在非线性、大惯性过程控制研究应用中具有广泛代表性。
近年来国内外许多学者对三容水箱系统的建模方法、控制算法及故障诊断等方面进行了探讨。
进一步研究三容水箱系统的控制算法并构建现在实验教学系统,在工业控制领域和工程控制论教学中都具有较为重要的理论和实际应用价值。
本设计通过对阶梯式、水平式这两种典型的水平式三容水箱系统分别进行理论建模,再分别加入了简单PID和串级PID控制器,并且在MATLAB的Simulink 仿真平台上搭建了相应的控制系统框图,对阶跃响应下的输出信号进行了仿真,实现了对两种三容水箱液位控制系统的控制。
1 两种三容水箱的工作原理1.1 三容水箱的结构三容水箱主体由3个圆柱型玻璃容器(Tankl(T1)、Tank2(T2)、Tank3(T3))、4个阀门(VT0、VT1、VT2、VT3、VT4)、一个增压泵、一个蓄水池和响应的连接部件组成。
三容水箱的机理建模
三容水箱的机理建模一、引言在水力工程中,水箱是一种常见的设施,用于储存和调节供水系统中的水量。
三容水箱是一种特殊的水箱,它具有三个容积不同的仓室,通过控制进出水口的开闭来实现供水和排水的调节。
本文将就三容水箱的机理进行建模,并探讨其工作原理和调节特性。
二、三容水箱的结构三容水箱通常由三个不同的仓室组成,分别为A仓、B仓和C仓。
这三个仓室通过进出水口相连,进出水口上设有阀门,通过控制阀门的开闭程度,控制水流的进出。
以A仓为最高仓,C仓为最低仓,B仓位于中间。
进出水口设置在A仓和B仓之间,以及B仓和C仓之间。
根据水流的原理,当水位在A仓较高时,水会流向B仓和C 仓,相反,当水位在C仓较高时,水会流向B仓和A仓。
三、三容水箱的工作原理三容水箱的工作原理基于波动原理,当三个仓室中的水位发生波动时,由于阀门的开闭控制,水流会从高位仓流向低位仓。
通过控制进出水口的开闭程度,可以调节水流的大小和速度,从而实现供水和排水的控制。
四、三容水箱的调节特性三容水箱的调节特性受到多个因素的影响,包括仓室容积、进出水口的位置和阀门的开闭控制等。
以下是三容水箱的一些调节特性:1. 动态调节特性三容水箱具有较好的动态调节特性,即可以根据需求快速调整供水和排水的速度。
当进出水口的阀门开启程度较大时,水流速度较快,可以满足大量用水需求;而当阀门开启程度较小时,水流速度较慢,可以适应小水量的供水需求。
2. 稳态调节特性三容水箱也具有较好的稳态调节特性,即可以在一定的时间范围内保持水位的稳定。
通过合理控制进出水口的开闭程度,可以使水箱在水位上升或下降时,调节水流的大小和速度,从而维持水位在一定范围内的稳定。
3. 响应时间三容水箱的响应时间取决于进出水口的开闭程度和水流的速度。
当阀门开启程度较大、水流速度较快时,水箱对于供水和排水需求的响应时间会比较短;而当阀门开启程度较小、水流速度较慢时,水箱对于需求的响应时间会相对较长。
4. 能耗和效率三容水箱的调节特性对于能耗和效率也有一定的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d ∆h1 ∆Q1 − ∆Q2 = A1 ① dt ∆ Q = K ∆u ② µ 1 1 ∆Q2 = ∆h1 ③ R2 d ∆h2 ∆Q2 − ∆Q3 = A2 ④ dt 1 ∆h2 ⑤ ∆Q3 = R3
∆h1 d ∆h1 K µ ∆u − = A1 ⑦ R2 dt ∆h1 ∆h2 d ∆h2 − = A2 ⑨ R2 R3 dt
K µ ∆µ −
∆h2 d ∆h1 d ∆h2 = A1 + A2 ⑧ R3 dt dt
d 2 ∆h2 R2 d ∆h2 d ∆h1 d ∆h2 R2 = A2 R2 + ⑩ ∆h1 = A2 R2 + ∆h2 2 dt dt R3 dt dt R3 d 2 ∆h2 A1R2 d ∆h2 d ∆h2 ∆h2 A1 A2 R2 + + A2 = K µ ∆µ − 2 dt R3 dt dt R3
所以T1T2 S H ( s ) + (T1 + T2 + T12 ) SH ( s ) + H ( s ) = KU ( s )
2
H (s) K = U ( s ) T1T2 S 2 + (T1 + T2 + T12 ) S + 1
例如:某双容水箱系统的结构参数为: 例如:某双容水箱系统的结构参数为:
H 2 (S ) K K = = µ ( S ) T1T2 S 2 + (T1 + T2 ) S + 1 (T1S + 1)(T2 S + 1)
式中: 前置水箱的时间常数; 式中: T1—前置水箱的时间常数; 前置水箱的时间常数 T2—主水箱的时间常数; 主水箱的时间常数; 主水箱的时间常数 K—双容对象放大系数。 双容对象放大系数。 双容对象放大系数
∆Q1 − ∆Q2 =A1
d ∆h1 ① dt
∆h1 ∆h2 ∆h2 d ∆h2 R2 d ∆h2 − − = A2 ⇒ ∆h1 = (1 + )∆h2 + A2 R2 R2 R2 R3 dt R3 dt
d ∆h1 R2 d ∆h2 d 2 ∆h2 A1 = A1 (1 + ) + A1 A2 R2 dt R3 dt dt 2
∆ h( ∞ )
以p为S形的拐点,做切线与 形的拐点, 时间轴交于A 时间轴交于A,则 τ = OA
c
为容积滞后时间
交于C ∆h2 (∞ ) 交于C 轴的投影为B C在t轴的投影为B,则 AB=T0 为被控过程的时间常数。 为被控过程的时间常数。 切线与稳态值 为简化多容过程, 为简化多容过程,就用有延时 的单容过程来近似。 的单容过程来近似。
20
Q3
t
t
Tc
pbτc源自att0有自平衡能力的多容对象与单容对象相比, 有自平衡能力的多容对象与单容对象相比,它们的共 同点是都具有自平衡特性和惯性, 同点是都具有自平衡特性和惯性,不同点是单容对象 被调量的最大变化速度发生在t= 时刻而多容对象发 被调量的最大变化速度发生在 =t0时刻而多容对象发 生在P点 生在 点。其原因是前置容积的容量和阻力所产生的惯 性使主水槽h2的变化在起始阶段出现更加缓慢的现象 的变化在起始阶段出现更加缓慢的现象, 性使主水槽 的变化在起始阶段出现更加缓慢的现象, 这种现象是由于对象容积的增多而产生的。 这种现象是由于对象容积的增多而产生的。前置水槽 的惯性使得主水槽的液位变化在时间上落后于扰动量, 的惯性使得主水槽的液位变化在时间上落后于扰动量, 这种迟延称为容积迟延。 这种迟延称为容积迟延。
τ
t
K0 H 2 (s) ∆h (∞) ≈ e −τ cs K 0 = 2 U ( s ) T0 S + 1 ∆u
d ∆h1 ∆Q1 − ∆Q2 = A1 dt 1 ∆Q = K ∆u ∆Q2 = ∆h1 µ 1 R2 ∆Q − ∆Q = A d ∆h2 2 3 2 dt 1 ∆Q3 = ∆h2 R3
µ
初始条件为零、阶跃输入为 时的解: 初始条件为零、阶跃输入为µ(t)=∆µ时的解: = 时的解
A1 = A2 = 1,R2 = 2,R3 = 1,K µ = 3
分离式形式的双容水箱系统参数为
K = K µ R3 = 3,T1 = A1 R2 =2,T2 = A2 R3 =1
H 2 (S ) K K 3 = = = 2 µ ( S ) T1T2 S + (T1 + T2 ) S + 1 (T1S + 1)(T2 S + 1) (2 S + 1)( S + 1)
R2 + R3 d ∆h2 ∆h2 d 2 ∆h2 d ∆h2 K µ ∆u − = A1 A2 R2 + A1 + A2 2 R3 dt R3 dt dt d 2 ∆h2 d ∆h2 R3 K µ ∆u = A1 A2 R2 R3 + [ A1 ( R2 + R3 ) + A2 R3 ] + ∆h2 2 dt dt
串联形式的双容水箱系统参数为
K = K µ R3 = 3,T1 = A1 R2 =2,T2 = A2 R3 =1,T12 = A1 R3 = 1
H ( s) K 3 = = 2 2 U ( s ) T1T2 S + (T1 + T2 + T12 ) S + 1 2 S + 4 S + 1
进水阀门进行单位阶跃扰动后的响应曲线分别如下, 进水阀门进行单位阶跃扰动后的响应曲线分别如下,可见相同的结构 参数下,串联双容水箱的液位响应更慢一些。 参数下,串联双容水箱的液位响应更慢一些。
τ表示。 表示。 c
这种延迟是由前一个惯性环节的作用使得后一个环节的输出量变化在时 间上落后于扰动量。 间上落后于扰动量。 对象的容积个数愈多, 对象的容积个数愈多,其动态方程 的阶次愈高,其容积迟延愈大; 的阶次愈高,其容积迟延愈大; 被控过程的容量系数越大, 被控过程的容量系数越大,容积迟 延也越大,图中给出的是具有1~ 延也越大,图中给出的是具有 ~5 个容积的对象的飞升特性。 个容积的对象的飞升特性。实际对 象的容积数目n可能很多, 象的容积数目n可能很多,每个容 量系数大小也不同。 量系数大小也不同。
⇒
令 则
d 2 ∆h2 A1R2 d ∆h2 d ∆h2 ∆h A1 A2 R2 + + A2 = K µ ∆µ − 2 dt 2 R3 dt dt R3 d 2 ∆h2 d ∆h2 A1 A2 R2 R3 + ( A1 R2 + A2 R3 ) + ∆h2 = R3 K µ ∆µ 2 dt dt T1 = A1 R2 T2 = A2 R3 K = K µ R3
T1 h2 (t ) = K ∆µ 1 − e T1 − T2
t − T1
T2 + e T1 − T2
t − T2
µ0 Q
∆µ 0
t
Q1
Q2 t0时刻,控制阀阶跃开大 0,前置水槽的流入 时刻,控制阀阶跃开大∆µ 量成比例增加∆Q1。液位 1按指数规律上升,前置 液位h 按指数规律上升, 量成比例增加 水槽流出侧的自平衡作用使流出量Q 水槽流出侧的自平衡作用使流出量 2在Q20基础上 也呈指数规律上升。 又是主水槽的流入量, 也呈指数规律上升。Q2又是主水槽的流入量 又使 主水槽水位h 基础上变化呈现更缓慢上升。 h1 主水槽水位 2在h20基础上变化呈现更缓慢上升。 h2的缓慢上升同样因主水槽流出侧阻力 3的存在 的缓慢上升同样因主水槽流出侧阻力R 使流出量在Q 基础上缓慢增加。 使流出量在 30基础上缓慢增加。 开始,H 随着不平衡流量∆Q= 1-∆Q2的逐 h Q=∆Q 开始 2随着不平衡流量 Q= 10 渐增大而缓慢上升,且上升速度逐渐增大; 渐增大而缓慢上升,且上升速度逐渐增大;到达 曲线上P点时上升速度最大 点时上升速度最大。 点以后 点以后, 曲线上 点时上升速度最大。P点以后,h2随着不 h2 平衡流量∆Q= 1-∆Q2的逐渐减小而缓慢上升 Q=∆Q 平衡流量 Q= 且上升速度逐渐减小。 ,且上升速度逐渐减小。h2的整个变化过程是一 形的变化曲线。 点就是 形曲线的拐点, 点就是S形曲线的拐点 条S形的变化曲线。P点就是 形曲线的拐点,也 形的变化曲线 是液位上升速度最快的点。 是液位上升速度最快的点。 h
①+④: d ∆h1 d ∆h2 ∆Q1 − ∆Q3 =A1 + A2 1 ∆Q1 =K µ ∆µ ∆Q2 = ∆(h1 − h2 ) dt dt R2 中间变量 d ∆h2 ∆Q2 − ∆Q3 =A2 ④ 1 d ∆h1 d ∆h2 K µ ∆u − dt ∆h2 = A1 + A2 R3 dt dt 1 ∆Q3 = ∆h2 R3
二、串联双容液位过程
d ∆h1 ∆Q1 − ∆Q2 =A1 ① dt
1 ∆Q1 =K µ ∆µ ∆Q2 = ∆ (h1 − h2 ) R2 d ∆h2 ∆Q2 − ∆Q3 =A2 ④ dt 1 ∆Q3 = ∆h2 R3
①+④: d ∆h1 d ∆h2 ∆Q1 − ∆Q3 =A1 + A2 dt dt
2.2.4 容积滞后与纯滞后
1、容积(量)滞后 、容积(
多容过程的传递函数
W0 ( s ) =
W0 ( s) =
K0 (T1 s + 1)(T2 s + 1)...(Tn s + 1)
K0 (T1 s + 1) n
多容过程对于扰动的响应在时间上的这种延迟被称为容量滞后, 多容过程对于扰动的响应在时间上的这种延迟被称为容量滞后,常用 对于扰动的响应在时间上的这种延迟被称为容量滞后
非振荡的二阶环节