第2章-2.2系统的微分方程描述
第2章 自动控制系统的数学模型
二、一阶惯性环节(一阶滞后环节)
1、数学表达式 :
2、特点 一阶惯性环节含有一个储能元件,输入 量的作用不能立即在输出端全部重现出来, 而是有一个延缓,即有惯性。 3、实例
例2-2 如图2-2所示的RC串联电路,以总电压ur 为输入,电容上电压uC为输出,试建立其微分方程。
图2-2 RC网络
解(1)确定系统的输入、输出变量,如图已知ur为输入,电 容电压uC为输出; (2)列微分方程组: 由基尔霍夫第二定律有: uR +uC =ur ① 由欧姆定律有: uR=R i ② 1 由电容充放电特性,有:uC= ∫idt ③ c (3)消去中间变量
n υ 他激直流电动
五、振荡环节(二阶滞后环节)
1、自动控制原理的研究对象是自动控制系统 的基本结构,这是本章的重点,要求通过实例掌 握自动控制系统各组成部分及其功能。 2、经典控制理论讨论的是按偏差进行控制的 反馈控制系统,应该了解其控制的目的、控制的 对象和控制的过程;熟悉对控制系统动态性能的 基本要求,即稳、快、准;为进一步掌握控制系 统的性能指标打好基础。
d n c(t ) d n 1c(t ) dc(t ) a0 a1 a n 1 a n c(t ) n n 1 dt dt dt d m r (t ) d m 1 r (t ) dr (t ) b0 b1 bm 1 bm r (t ) m m 1 dt dt dt
第2章 线性系统的数学模型
第2章 线性系统的数学模型
六、纯滞后环节(纯延迟环节)
表达式: c(t)=r(t-τ) 特点:输出比输入滞后一个时间τ。 实例:延时继电器。
2-2 传递函数
传递函数是线性定常连续系统最重要的数 学模型之一,是数学模型在复频域内的表示形 式。利用传递函数,不必求解微分方程就可以 求取初始条件为零的系统在任意形式输入信号 作用下的的输出响应,还可以研究结构和参数 的变化对控制系统性能的影响。经典控制理论 的主要研究方法——根轨迹分析法和频域分析 法都是建立在传递函数基础上的。
第二章例题
y(0) = C1+C2+ 1 = 2,y’(0) = – 2C1 – 3C2 – 1= – 1
解得 C1 = 3 ,C2 = – 2
最后得全解
y(t) = 3e – 2t – 2e – 3t + e – t , t≥0
第16-2页
■
©西安电子科技大学电路与系统教研中心
信号与系统 电子教案
2.1 LTI连续系统的响应
信号与系统 电子教案
第二章 连续系统的时域分析
目录 2.1 LTI连续系统的响应 2.2 冲激响应和阶跃响应
2.3 卷积积分 2.4 卷积积分的性质
点击目录 ,进入相关章节
第16-1页
■
返回
©西安电子科技大学电路与系统教研中心
信号与系统 电子教案
2.1 LTI连续系统的响应
例 :描述某系统的微分方程为 y”(t) + 5y’(t) + 6y(t) = f(t)
[yzs’(0+)- yzs’(0-)]+ 3[yzs(0+)- yzs(0-)]
0
0
2 yzs (t) d t 2 6 ε (t) d t
0
0
因对此t>0,时y,zs’(有0+)=y2zs+”(yt)zs+’(03-y)z=s’2(t) + 2yzs(t) = 6
不难求得其齐次解为Czs1e-t + Czs2e-2t,其特解为常数3,
第16-3页
■
©西安电子科技大学电路与系统教研中心
信号与系统 电子教案
2.1 LTI连续系统的响应
二、关于0-和0+初始值
若输入f(t)是在t=0时接入系统,则确定待定系数 Ci时用t = 0+时刻的初始值或初始条件,即y(j)(0+) (j=0,1,2…,n-1)。
2机械控制工程基础第二章答案
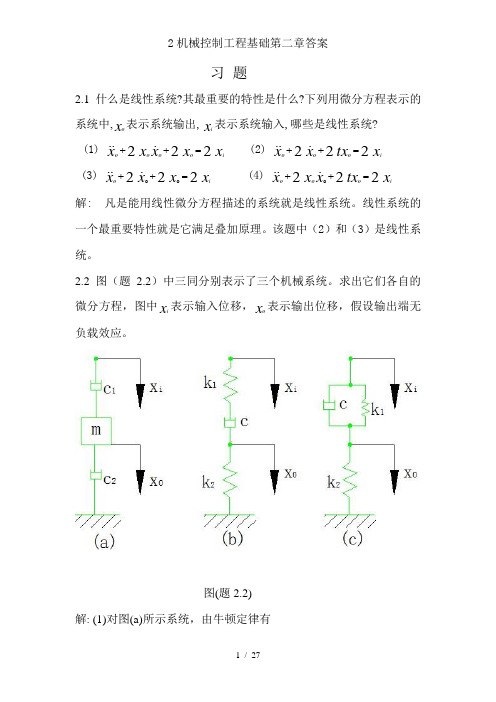
习 题2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x ioooo 222=++ (2) x tx x xiooo222=++ (3) x x x xio 222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有xm x c x x c ioo2o1)(=-- 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有)1()()(1x xc k x x oi-=- )2()(2x k x xc oo=-消除中间变量有x ck x k k xk k c io121o21)(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x xc ooioi21)()(=-+-即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有⎰+=idt Ci R u o122i R u u o i 11=-dti i Cu u oi)(111⎰-=-消除中间变量,并化简有u R C u CC R R uR C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有⎰++=idtC i R u u oi111⎰+=i R idt Cu o221 消除中间变量,并化简有u Cu R u C C u R R iioo2221211)11()(+=+++2.4 求图(题2.4)所示机械系统的微分方程。
2机械控制工程基础第二章答案

习 题2.1 什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++&&& (2) x tx x xiooo222=++&&& (3) x x x x io222oo=++&&& (4) x tx x x xiooo222o=++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 即xc x c c x m i&&&&121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k x c iioo121)(+=++&&2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++&&&&&&&(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有2.4 求图(题2.4)所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
2_控制系统的数学模型(1)
x1 x10 x2 x20
x1 x10 x2 x20
2015/12/8
14/86
2.1 概念
滑动线性化——切线法 线性化增量方程为: y y' =xtg 切线法是泰勒级 数法的特例。
0
y0
y=f(x)
y’
例图为在扭矩m作用下的转动机械系统外加扭矩和转角间的微分方程为作用下的转动机械系统外加扭矩和转角间的微分方程为jjjckm图例回转机械系统m转动惯量角转角rad回转粘性阻系数扭转弹簧常数2nm?1nmsrad???1nmrad??扭矩nm?222机械系统的微分方程2018332286222机械系统的微分方程例22如图22是含有一级减速器的齿轮传动系统是输入转矩是输出轴上所带负载的阻转矩分别为主动轴和从动轴的转动惯量和阻尼系数减速器的传动比为
d 2 (t ) d 2 2 (t ) M 2 (t )-f 2 -M l (t )=J 2 dt dt 2 齿轮传动系功率平衡方程为: M1 (t )1 (t )=M 2 (t )2 (t )
i 1 (t )/2 (t )
利用式(2-5)、(2-6)及(2-7),消去中间变量 M1 (t ) 、 M 2 (t ) 、 2 (t ), 得: 1 d 21 (t ) 1 d1 (t ) 1 J + J + f + f = M ( t )M l (t ) i 1 2 2 1 2 2 2 i i i dt dt 令:
dn d n 1 d x (t ) a1 n 1 xo (t ) an 1 xo (t ) an xo (t ) n o dt dt dt dm d m 1 d b0 m xi (t ) b1 m 1 xi (t ) bm 1 xi (t ) bm xi (t ) dt dt dt
第2章 线性时不变系统
0 t
2.4 LTI系统的性质
举例:累加系统(accumulator)
y[n]
k
x[k ]
n
它是LTI系统,其单位脉冲响应为
h[n] u[n]
h[n] k [n] Memory h[n] 0, n 0 Causal
2.4 LTI系统的性质
从以上推导得出以下结论: DT LTI 系统的单位阶跃响应是其单位脉冲响应的求和函数; DT LTI 系统的单位脉冲响应是其单位阶跃响应的一次差分 同理,对于CT LTI 系统: 单位阶跃响应是其单位冲激响应的积分函数
s(t ) h( )d
t
单位冲激响应是其单位阶跃响应的一阶导数
2.7小结
2.1概述
(1)线性与时不变性(Linearity and Time-Invariance): 很多物理过程都具有这两个性质 这些物理过程能用LTI系统表征 可以对LTI系统进行详细的分析:
能够将LTI系统的输入用一组基本信号的线性组合表示 根据该系统对基本信号的响应,利用叠加性质求得整个系统的输出
2.4 LTI系统的性质
离散时间LTI系统用 卷积和表示
连续时间LTI系统用 卷积积分表示
LTI系统的特性可以 完全由其单位冲激响 应决定
2.4 LTI系统的性质
卷积的交换律性质 The Commutative Property of Convolution
2.4 LTI系统的性质
卷积的三个代数性质:交换律、结合律、分配律 Three algebraic properties of convolution
2机械控制工程基础第二章答案解析
习 题2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x ioooo 222=++ (2) x tx x xiooo222=++ (3) x x x xio 222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有xm x c x x c ioo2o1)(=-- 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有)1()()(1x xc k x x oi-=- )2()(2x k x xc oo=-消除中间变量有x ck x k k xk k c io121o21)(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x xc ooioi21)()(=-+-即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有⎰+=idt Ci R u o122i R u u o i 11=-dti i Cu u oi)(111⎰-=-消除中间变量,并化简有u R C u CC R R uR C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有⎰++=idtC i R u u oi111⎰+=i R idt Cu o221 消除中间变量,并化简有u Cu R u C C u R R iioo2221211)11()(+=+++2.4 求图(题2.4)所示机械系统的微分方程。
第2章 线性系统的数学模型
2.2.1
传递函数的定义
传递函数: 初始条件为零时,线性定常系统或
元件输出信号的拉氏变换与输入信号的拉氏变 换的比,称为该系统或元件的传递函数。
线性定常系统微分方程的一般表达式
d n c(t ) d n1c(t ) dc(t ) d m r (t ) an dt n an1 dt n1 a1 dt a0 c(t ) bm dt m b0 r (t )
ma F F FB FK
F (t )
m
k
(1)
f
y (t )
其中 FB f
dy dt FK ky
-阻尼器的粘性摩擦力 -弹簧的弹力
(3)消去中间变量,得到输入与输出的关系方程 将以上各式代入(1)式得 d2y dy m 2 F f ky dt dt
(4)整理且标准化
U2
(3)消去中间变量,得到U2与U1的关系方程
对(2)式求导得
dU 2 1 i, dt C 即i C dU 2 dt
d 2U 2 dU 2 U 2 U1 代入(3)式并整理得 LC 2 RC dt dt
例2-2:如图所示为一弹簧阻尼系统。图中质量为m的物体受 到外力作用产生位移Y,求该系统的微分方程。 解: (1)确定输入量和输出量 输入量:外力F(t) 输出量:位移y(t) (2)列写原始微分方程
2)
c( s) bm (d m s m d m1s m1 1) G( s) r ( s) an (cn s n cn 1s n 1 1)
(T1s 1)(T2 s 1) (Tm s 1) =K (T1s 1)(T2s 1) (Tm s 1)
+
自动控制原理第2章
※传递函数不仅可以表征系统的动态特性,而且可以
用来研究系统的结构或参数变化对系统性能的影响。
微分方程 t (时域)
L
L
1
F
F 1
系统
传递函数
s j
j
频率特性
s
(复域)
s
(频域)
2.3.1拉氏变换相关知识
2.3.2传递函数的定义
线性定常系统在零初始条件下,输出量的拉氏变换
②两个自变量: y=f(x1, x2) 静态工作点: y0=f(x10, x20) 在y0=f(x10, x20) 附近展开成泰勒级数,即
f 1 2 f f 2 f 2 f 2 ( x1 x10 ) 2 y f ( x10 , x20 ) ( x1 x10 ) ( x2 x20 ) ( x1 x10 )(x2 x20 ) 2 ( x2 x20 ) 2 x 2! x x2 x1x2 x2 1 1
例2.5试建立如图2.4所示系 统的微分方程。
R1
解:根据克希霍夫电压定律, 可写出下列方程组
u1
R2
ur
i1
C1 图2.4
i2
C2
uc
1 ur R1i1 C (i1 i2 )dt 1 1 1 (i1 i2 )dt R2i2 i2 dt C2 C1 1 uc i2 dt C2
用台劳级数展开为
df ( x) 1 d 2 f ( x) y f ( x) f ( x0 ) ( ) x 0 ( x x0 ) ( ) x 0 ( x x0 ) 2 ... dx 2! dx 2
哈工大 第二章 机电系统的数学模型 彭高亮9-2
但 是y1 ( t )+y2 ( t ) x1 ( t )+x 2 ( t ) 2 〔 〕
为解决非线性带来的问题通常采用局部线性化
哈尔滨工业大学 机电工程学院
2.2 系统的微分方程
二、系统微分方程的建立步骤
a)建立物理模型(包括力学模型、电学模型等),确 定系统或元件的输入量和输出量; b)按照信号的传递顺序,根据各元件或环节所遵循的 有关定律建立各元件或环节的微分方程; c)消去中间变量,得到描述系统输入量和输出量之间 关系的微分方程; d)整理为标准式,将与输出量有关的各项放在方程的 左侧,与输入量有关的各项放在方程的右侧,各阶导 数项按降幂排列。
哈尔滨工业大学 机电工程学院
?
2.2.2 机械系统的微分方程
机械系统中基本物理量的折算
实例: 图(a)为丝杠螺母传动机构,(b)为齿轮齿条传动机构,(c) 为同步齿形带传动机构,求三种传动方式下,负载m折算到 驱动电机轴上的等效转动惯量J
电机输入
m m
电机输入 电机输入
m
(a)
(b)
(c)
电机驱动进给装置
线性定常系统 线性系统 系统 非线性系统
哈尔滨工业大学 机电工程学院
线性时变系统
2.2 系统的微分方程
线性系统
系统的数学模型能用线性微分方程描述。
线性定常系统: 微分方程的系数为常数
k2 y(t ) k1 y(t ) y(t ) x(t )
线性时变系统:微分方程的某一(些)系数随时间的变化。
2.2.2 机械系统的微分方程
质量—弹簧—阻尼系统各部分基本物理规律: • 质量(块)
y
v(t )
f m (t )
0
m